romow progress update #2. team members nathan terschak (ee), dustin brouwer (me), jordan newhof...
TRANSCRIPT
RoMowProgress Update #2

Team Members
Nathan Terschak (EE), Dustin Brouwer (ME), Jordan Newhof (ME), Andy Frandsen (ME)
Overview
Problem Statement Need Objectives
Design Norms Scope Design Decisions Design Implementation Current Status
Obstacles Future Work
Problem Statement: Need
Designing a remote-controlled
lawn mowing system for: Professor Kim
Serving as:
Customer
Mentor
Elderly or Disabled Living Independently
Ease of use
Hobbyists
http://www.ifpv.co.uk/wp-content/uploads/2014/04/RobbieKnowles-300x1971.png
Problem Statement: Objectives
Design a remote-control platform: Should be attachable to a standard push lawnmower
Will house control system, electric motors, and batteries
Can be driven via wireless controller
Does not require modifications to push mower
Must include Safety System
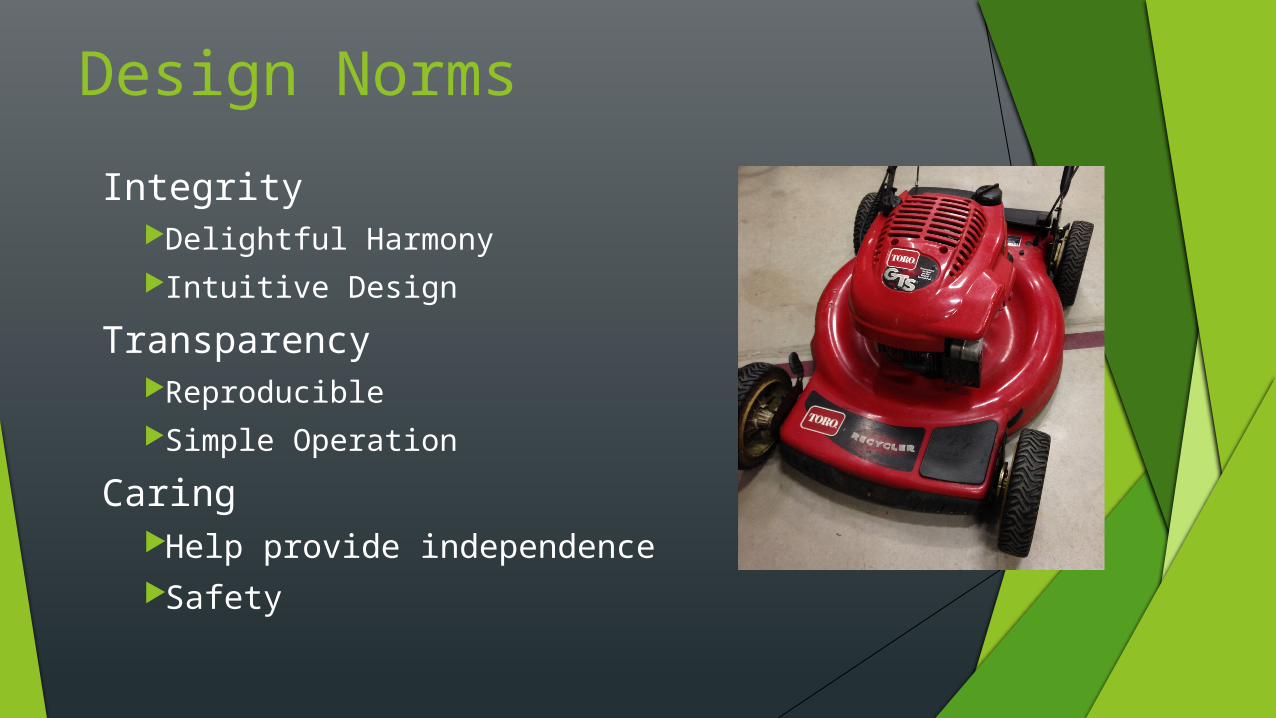
Design Norms
IntegrityDelightful HarmonyIntuitive Design
TransparencyReproducibleSimple Operation
CaringHelp provide independenceSafety
Scope Changes
Eric Walstra helped identify
problems and proposed
some scope reductions: Automation Sensors
Video Thermal Proxy
http://www.tracepartsonline.net/PartsDefs/Production/OMRON/10-13092012-113013/pictures/10-13092012-113013L.gif
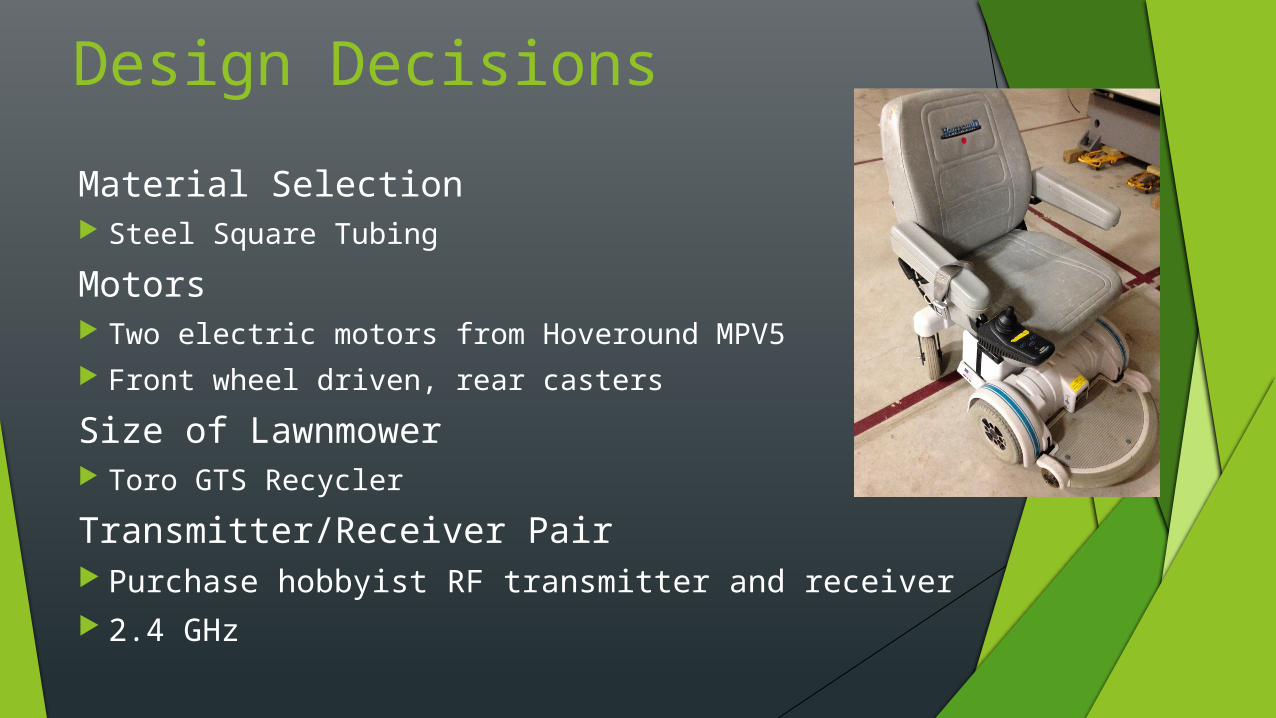
Design Decisions
Material Selection Steel Square Tubing
Motors Two electric motors from Hoveround MPV5 Front wheel driven, rear casters
Size of Lawnmower Toro GTS Recycler
Transmitter/Receiver Pair Purchase hobbyist RF transmitter and receiver 2.4 GHz
Design Implementation
Hoveround MPV5 12 V Batteries Motors Motor Drivers Wheels
Steel Frame Suspending Mower
above the grass Compartment to
hold Batteries Controls system Motors
Self-Contained Ramp for loading
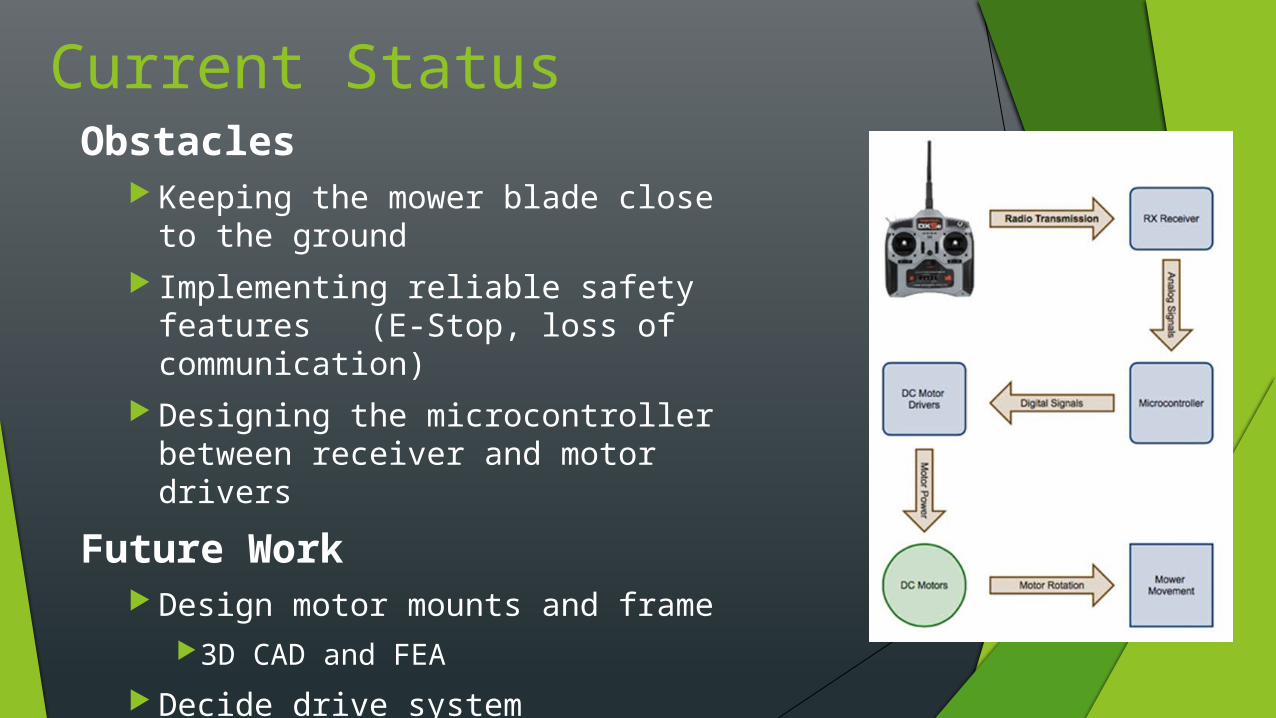
Current StatusObstacles
Keeping the mower blade close to the ground
Implementing reliable safety features (E-Stop, loss of communication)
Designing the microcontroller between receiver and motor drivers
Future Work Design motor mounts and frame
3D CAD and FEA
Decide drive systemDirect vs. geared vs. chain

Questions?