www.guardians-project.eu non-communicative robot swarming in the guardians project j. sàez-pons...
Post on 21-Dec-2015
223 views
TRANSCRIPT
www.guardians-project.eu
Non-communicative robot swarming in the GUARDIANS project
J. Sàez-Pons
Lyuba Alboul
Veysel Gazi
Jacques Penders
8 January, RISE 08

www.guardians-project.eu
GUARDIANS project
© Jaime Alemany

www.guardians-project.eu
Contents
• Non-communicative robot swarming• Potential functions method• Simulation results• Conclusions• Future work
www.guardians-project.eu
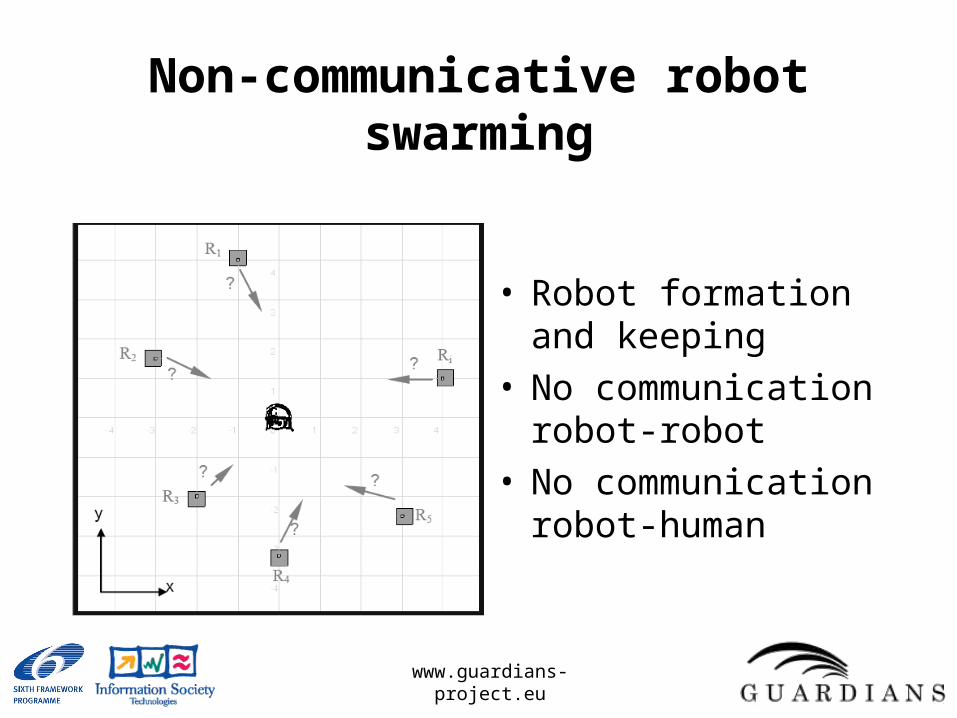
Non-communicative robot swarming
• Robot formation and keeping
• No communication robot-robot
• No communication robot-human

www.guardians-project.eu
Method
• Social potential functions [Reif and Wang 99]
Each robot Ri calculates a Force Fi, which is the generator of the new velocity vector of the robot
• Assumptions:
Each robot can distinguish between obstacles, humans and other robots
www.guardians-project.eu
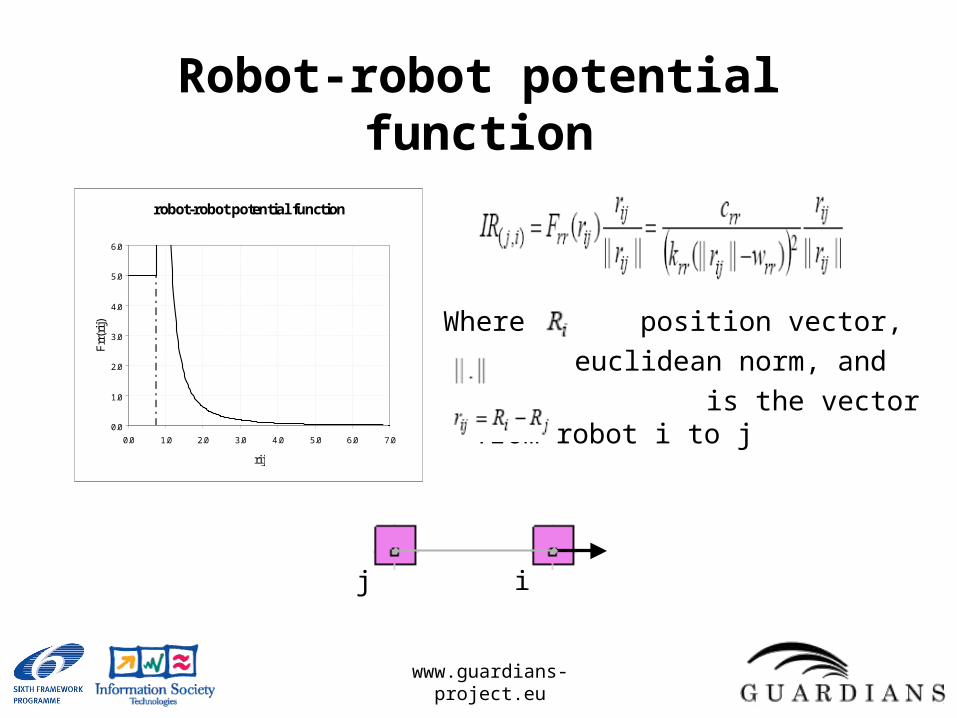
Robot-robot potential function
Where position vector,
euclidean norm, and
is the vector from robot i to j
ij
robot-robot potential function
0.0
1.0
2.0
3.0
4.0
5.0
6.0
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0
rij
Frr
(rij
)
www.guardians-project.eu
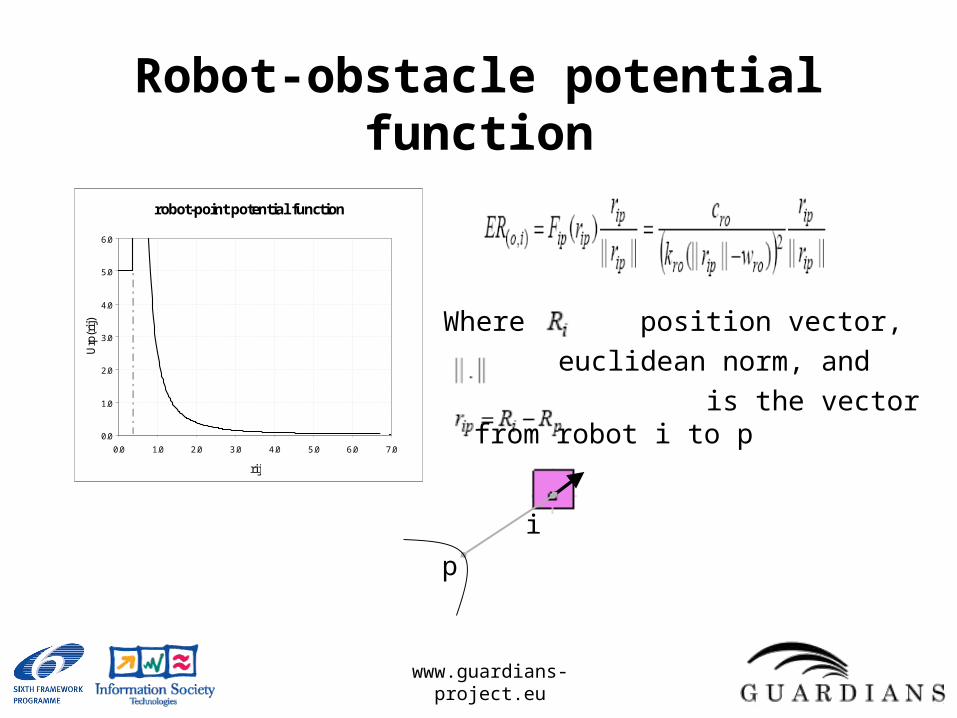
Robot-obstacle potential function
i
p
Where position vector,
euclidean norm, and
is the vector from robot i to p
robot-point potential function
0.0
1.0
2.0
3.0
4.0
5.0
6.0
0.0 1.0 2.0 3.0 4.0 5.0 6.0 7.0
rij
Urp
(rij
)
www.guardians-project.eu
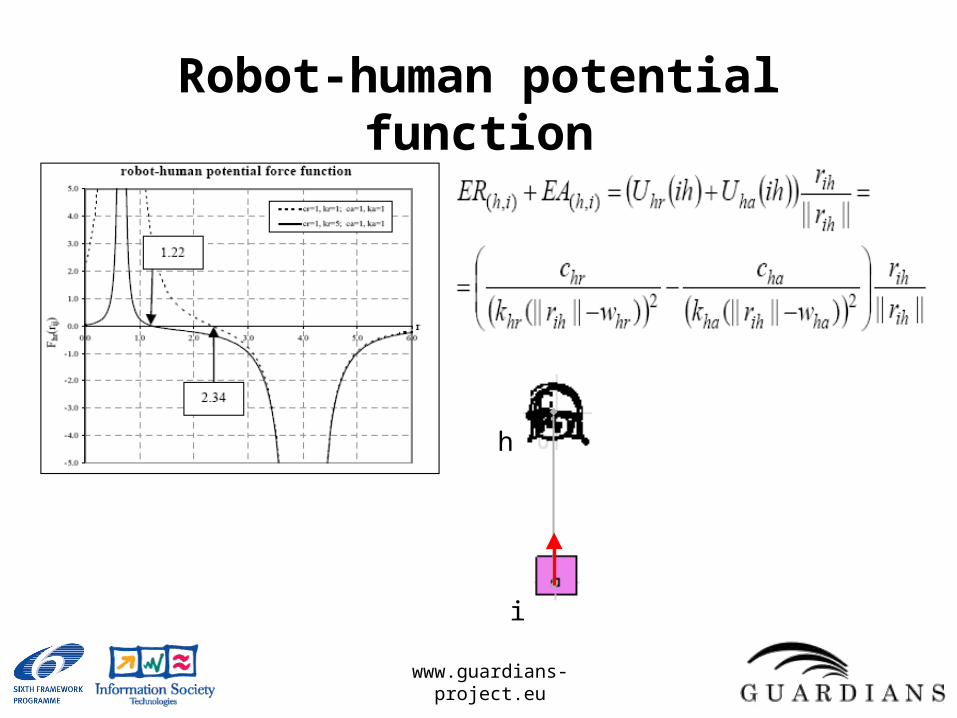
Robot-human potential function
h
i

www.guardians-project.eu
Artificial potential function (APF)
ij
p
hRobot-Human
Robot-Robot
Robot-Obstacle
www.guardians-project.eu
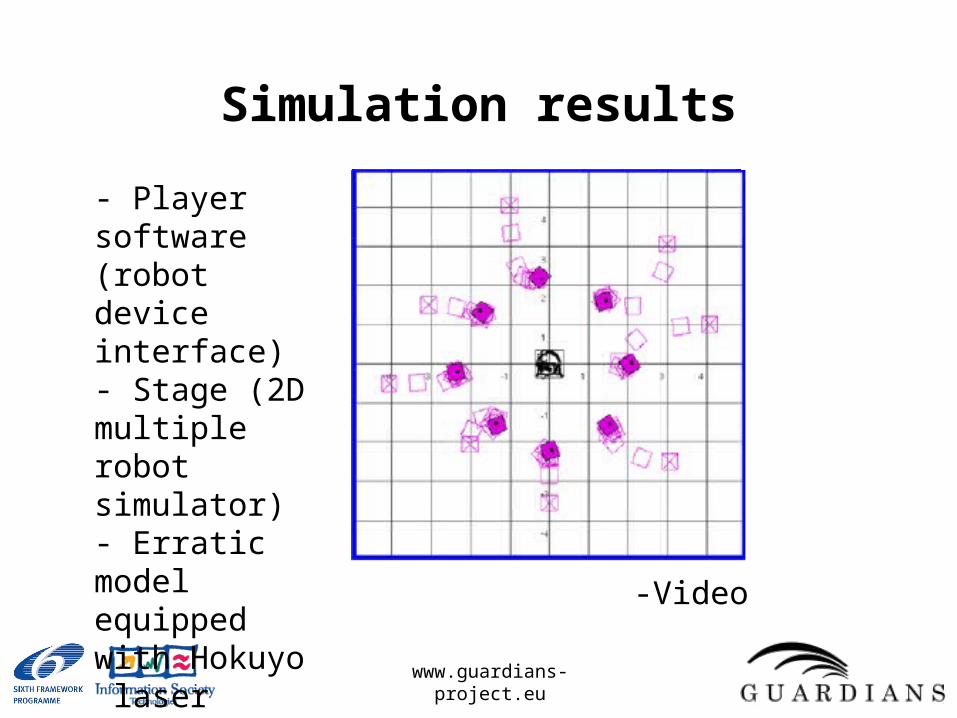
Simulation results
-Video
- Player software (robot device interface)- Stage (2D multiple robot simulator)- Erratic model equipped with Hokuyo laser rangefinder

www.guardians-project.eu
Simulation results
-Video
www.guardians-project.eu
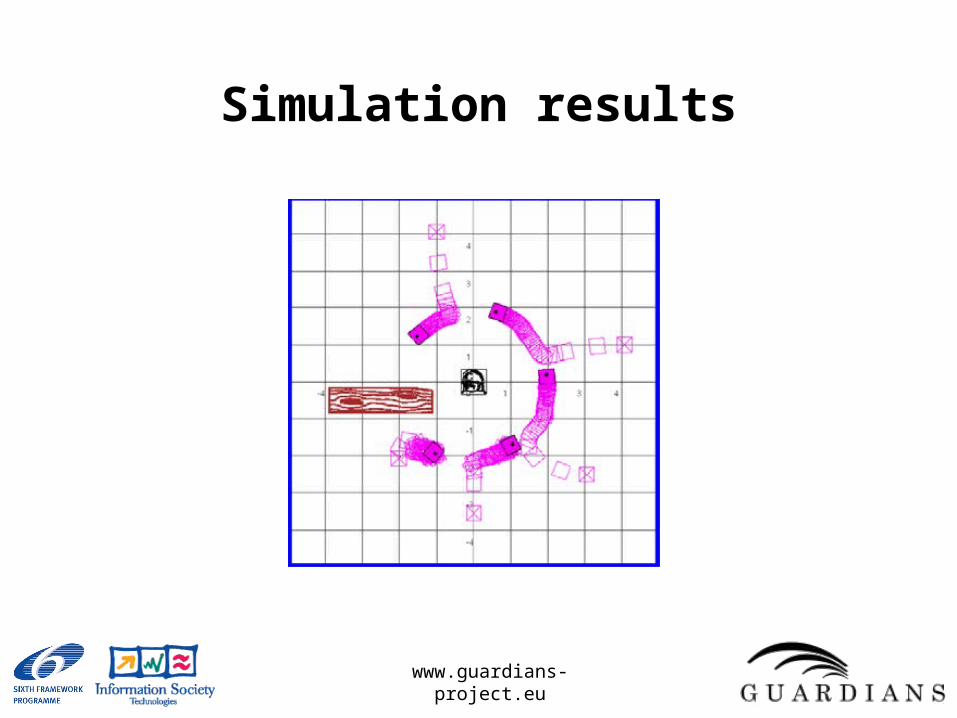
Simulation results
www.guardians-project.eu
Conclusions
• Formation generation around the fire fighter with no communication between team components
• Potential field method suitability
• Robot-human team navigation
• Swarm obstacle avoidance
• Flexibility– Number of robots
– Robust to failures of individual robots
• Problems using APF– Local minima
– Overwhelmed situations
www.guardians-project.eu
Future work
• More complex scenarios:– More obstacles
– Narrow corridors
– Doors
• Combination of different control behaviours– Wall-following
– Lost robot situation
– …
• Study other attraction/repulsion potential functions
THANK YOU!