structural health monitoring - bridge & structure … · structural health monitoring ......
TRANSCRIPT

Structural health monitoring
Tomonori NagayamaTomonori NagayamaAssistant professor University of Tokyo
/ /2010/07/19
Introduction
Civil infrastructureV l bl t hi h k d liValuable asset, which keeps economy and lives running
l b d ( k h k d )A long span bridge (ex. Akashi‐Kaikyo Bridge in Japan) costs billions of dollarsG ld G t B id h ~ 40 illi iGolden Gate Bridge has ~ 40 million crossing per year
2
Degrading infrastructure
>40 % of the nation’s bridges are structurally deficient or functionally obsolete (FHWAdeficient or functionally obsolete (FHWA, sufficiency rating) >800 l b id i th ti l b id>800 long span bridges in the national bridge inventory (NBI) are fracture‐critical.
3
Maintenance is vital
schedule‐driven, or based on expensive and questionable visual inspectionquestionable visual inspection
Inspections Every two years for >600 000 bridges in USEvery two years for >600,000 bridges in US.Every two ‐ five years in Japan
B kl B id i l i ti >3 th >$1 illiBrooklyn Bridge visual inspection: >3month, >$1million 56% of visual inspection results are incorrect with a 95% probability (based on sample tests on inspectors)95% probability (based on sample tests on inspectors)
A t ti t f t t ’ t t t (Accurate estimate of structures’ current state (or SHM) will enable efficient and effective Condition‐B d M i t (CBM)Based Maintenance (CBM)
4

Sensory systems for structures
DiagnosticsPrognostics
Sensory
Prognostics
SensorySystem
SensorySystem
SafetyPerformance
Life-Cycle Cost y
From Prof. Spencer’s lecture
Various purposes of SHMTo monitor and control the construction processT lid t th t t l d i d h t iTo validate the structural designs and characterize performance (e.g., develop database)To characterize loads in situTo assist with building/bridge maintenanceTo detect and localize damage before it reaches a critical level, thus increasing the safety to the public, g y pTo reduce the costs and down‐time associated with repair of damagerepair of damageTo assist with emergency response efforts, including building evacuation and traffic controlbuilding evacuation and traffic control
From Prof. Spencer’s lecture
Classification into 4 levels
1. Detect damage2 Locate damage2. Locate damage3. Identify the severity of damage4 P di t th i i i lif f th t t4. Predict the remaining service life of the structure.
How? Any better alternative or complement to visual inspection?How? Any better alternative or complement to visual inspection?Static measurement‐based SHM
Ex.) static strain monitoring using fiber optic sensor.NDT for detailed inspection
Ex.) acoustic emission, ultrasonic testing, radiographic inspection, etc.i b d hImage processing‐based approach
Ex.) Crack detection from image processing.Vibration‐based SHMVibration‐based SHM
More information than static measurement.No need to measure at the surface. 7
Common practice for vibration‐based SHM
1. Vibration measurementOutput: Acceleration, Velocity, Displacement, Input force, etc.Method: Ambient vibration, Shaker excitation, etc.
2. Feature extractionModal AnalysisOutput: Natural Frequency, Damping ratio, Mode shape, etcMethod: Time Domain method, Frequency Domain method
l lStructural AnalysisOutput: Flexibility, Mass, Damping, and/or Stiffness MatricesMethod: Optimization, Stiffness or Flexibility Matrix synthesis fromMethod: Optimization, Stiffness or Flexibility Matrix synthesis from
Mass and Modal information
3. Damage Assessment
8
gOutput: Damage existence, location, severity, expected life, etc.Method: Damage Locating Vector, Change in Stiffness Matrix etc.
Vibration‐based SHM
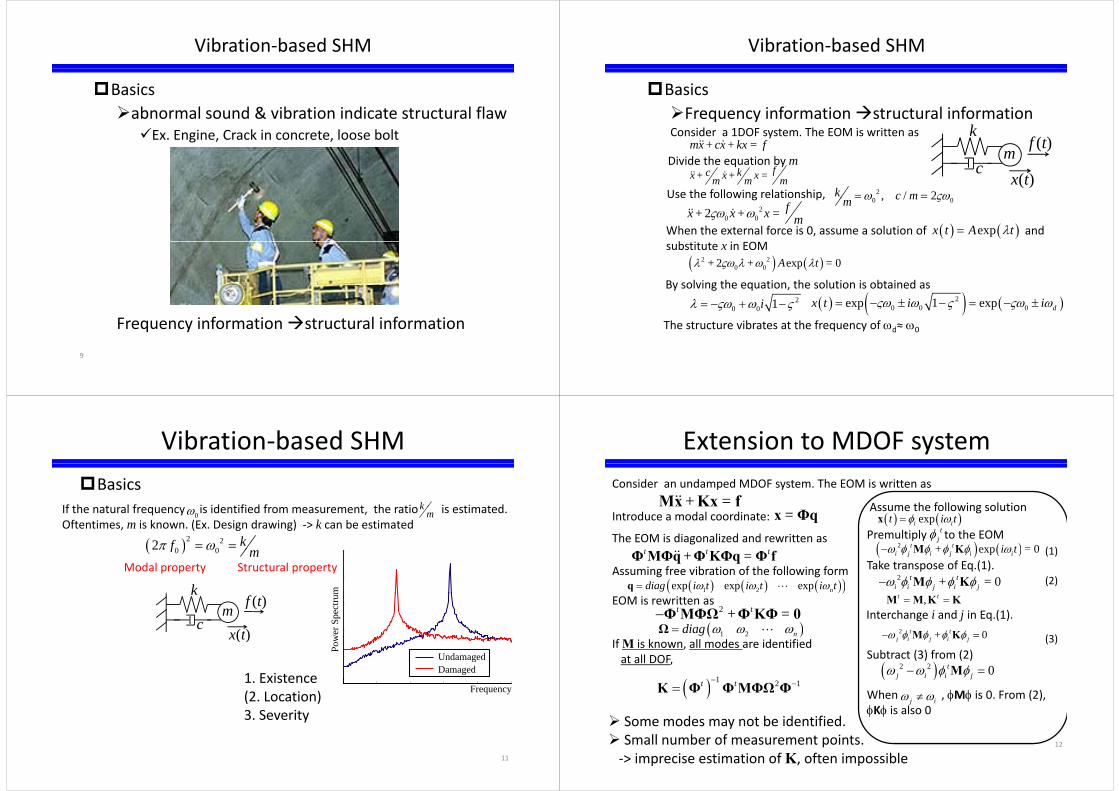
Basicsabnormal sound & vibration indicate structural flawabnormal sound & vibration indicate structural flaw
Ex. Engine, Crack in concrete, loose bolt
Frequency information structural information
9
Frequency information structural information
Vibration‐based SHM
BasicsFrequency information structural informationFrequency information structural information
mx+cx+kx = f&& &Consider a 1DOF system. The EOM is written as
mk
f (t)fc kx+ x+ x =m m m&& &
Use the following relationship, x(t)
mcDivide the equation by m
20 0/ 2= =k c mω ςω
20 02 fx+ x+ x = mςω ω&& &
g p, 0 0, / 2c mm ω ςω
When the external force is 0, assume a solution of and b
( ) ( )exp=x t A tλsubstitute x in EOM
( ) ( )2 20 02 exp 0+ + A t =λ ςω λ ω λ
By solving the equation the solution is obtained as( ) ( ) ( )2
0 0 0exp 1 exp= − ± − = − ± dx t i iςω ω ς ςω ωBy solving the equation, the solution is obtained as
20 0 1= − + −iλ ςω ω ς
The structure vibrates at the frequency of ωd≈ ω0The structure vibrates at the frequency of ωd ω0
Vibration‐based SHMBasics
If th t l f i id tifi d f t th ti i ti t dk
( )2 20 02 = = kfπ ω
If the natural frequency is identified from measurement, the ratio is estimated.Oftentimes, m is known. (Ex. Design drawing) ‐> k can be estimated
0ωk
m
m
( )0 0f mStructural propertyModal property
k
wer
Spe
ctru
m
x(t)m
c
kf (t)
UndamagedDamaged
Powx(t)
1 ExistenceFrequency
1. Existence(2. Location)3. Severity
11
Extension to MDOF system
+ =Mx Kx f&&Consider an undamped MDOF system. The EOM is written as
Assume the following solutionIntroduce a modal coordinate: =x ΦqThe EOM is diagonalized and rewritten as
t t t
( ) ( )exp= i it i tφ ωxAssume the following solution
Premultiply to the EOM tjφ
( ) ( )2 exp 0− t t+ i t =ω φ φ φ φ ωM K (1)t t t+ =Φ MΦq Φ KΦq Φ f&& ( ) ( )exp 0i j i j i i+ i tω φ φ φ φ ωM KTake transpose of Eq.(1).
(1)
2 0− t ti i j i j+ =ω φ φ φ φM K (2)( ) ( ) ( )( )1 2exp exp exp= ndiag i t i t i tω ω ωq L
Assuming free vibration of the following form
2 0− =t t+ω φ φ φ φM K
Interchange i and j in Eq.(1).
(3)
,= =t tM M K K( )
EOM is rewritten as 2− t t+ =Φ MΦΩ Φ KΦ 0
( )1 2= ndiag ω ω ωΩ L 0=j i j i j+ω φ φ φ φM K (3)Subtract (3) from (2)
( )2 2 0− =tj i i jω ω φ φM
If M is known, all modes are identified at all DOF,
( ) 1−
( )
( )When , φMφ is 0. From (2),φKφ is also 0
≠j iω ω( ) 1 2 1− −= t tK Φ Φ MΦΩ Φ
Some modes may not be identified12
Some modes may not be identified. Small number of measurement points. ‐> imprecise estimation of K, often impossible

Stiffness matrix estimation( ) 1 2 1− −= t tK Φ Φ MΦΩ Φ2− t t+ =Φ MΦΩ Φ KΦ 0
When some modes are not observed, matrix inverse cannot be calculated.2= =tΦ MΦ M vUsing , the stiffness can be written as
( ) 1 2 1− −= t tK Φ v Ω vΦAlso from definition Therefore( )2 t ( )2t
(1)Also, from definition, . Therefore, ( )2− =tv Φ M Φ I ( )2− =tΦ MΦv I
1 2− −= tΦ v Φ M ( ) 1 2− −=tΦ MΦvThe stiffness matrix can be written asThe stiffness matrix can be written as
1 2 1− −= TK MΦv Ω v Φ MConsidering that is diagonal matrix, K can be written as summation of contribution from each mode
1 2 1− −v Ω vof contribution from each mode.
2 2
1
−
=
= ∑n
Tj j j j
jvφ ω φK M M (2)
If only m modes out of n modes are observable, K has estimation error.Because frequencies appear in (2) as weighting coefficients, high
13
Because frequencies appear in (2) as weighting coefficients, high frequency modes have large influences on K
Flexibility matrix estimationFrom (1), the Flexibility matrix, F=K-1, is written as follows.
( )1 2 1− − −=t
F Φv Ω Φv( )Considering contribution from each mode, the matrix is expressed as
2 2
1
− −
=
= ∑n
tj j j j
jvφ ω φF (3)
j
If only m modes out of n modes are observable, F has estimation error.Because the reciprocal of frequencies appear in (3) as weighting coefficients,
low frequency modes have large influences on Flow frequency modes have large influences on F
14
Comparison of stiffness and flexibility matrix estimations
M d l id ifi i i f d hModal identification is performed on the truss. K and F are estimated from identified modes.
Stiffness matrix estimation Flexibility matrix estimation
error
error
timation e
timation e
Est
Est
15
Only low frequency modes provide reasonable estimation
Mass matrix may be unknown…
Δ
When mass matrix is unknown, calibrate the system using known massSuppose the frequencies of the system before and after
kf (t)m
Δm20 =m kω
Suppose the frequencies of the system before and after addition of the mass are ω0 and ω1.
( ) 2+ Δ k20
22
01⎡ ⎤− ⎧ ⎫⎧ ⎫=⎨ ⎬ ⎨ ⎬⎢ ⎥ Δ⎩ ⎭ ⎩ ⎭
mk
ω
x(t)cm( ) 2
1+ Δ =m m kω 2211 1 ⎨ ⎬ ⎨ ⎬⎢ ⎥ −Δ− ⎩ ⎭ ⎩ ⎭⎣ ⎦ mk ωω
When Δm is small, the matrix is ill‐posed.To improve the accuracy mass perturbation cases can beTo improve the accuracy, mass perturbation cases can be increased.
20 01⎡ ⎤− ⎧ ⎫
⎢ ⎥ ⎪ ⎪ω
Least Square problemMinimize the residual error of Ax = b expressed as follows
022
1 11
22
1
1
⎧ ⎫⎢ ⎥ ⎪ ⎪−Δ− ⎧ ⎫ ⎪ ⎪⎢ ⎥ =⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎩ ⎭ ⎪ ⎪⎢ ⎥ ⎪ ⎪Δ⎢ ⎥ ⎩ ⎭⎣ ⎦
mmk
m
ωω
ωMM M
[ ] [ ]= − −= − − +
t
t t t t t tJ Ax b Ax b
x A Ax b Ax x A b b b
) )) ) ) )
∂J2 1 ⎪ ⎪−Δ−⎢ ⎥ ⎩ ⎭⎣ ⎦ n nn m ωω
A x = b2 2 0∂
= − =∂
t tJ A Ax A bx
))
( ) 1−= t tx A A A b)
16
( )For MDOF extension, refer to Dinh et al. (2009)

Extension to civil infrastructure
Civil infrastructure’s features:L lLarge scaleContinuous system infinite DOF or approximationinfinite DOF or approximationLarge number of elementsRedundant structureRedundant structureDistinctive designL t l fLow natural frequencyNon‐trivial input forceD i d i t il il blDesign drawing not necessarily availableetc.
Change in modal propertiesPrecise inverse estimation of structural properties are often difficultare often difficultThe existence and location of damage are sought f diff b t d l ti b ffrom differences between modal properties before and after damage.
Frequency Damping ratioMode shapes Stiffness and flexibility matricesStiffness and flexibility matrices
18
Small change in modal properties
Change in modal properties is not apparent
x&&measurement50% section loss
trum
ower
Spe
ct
UndamagedDamaged
Po
19
gFrequency
Frequency change
The vibration of a bridge on I40 was measured while progressively damaging the structureprogressively damaging the structure.

Identified natural frequencies
??
Changes in frequencies and temperature
Damage detection based on frequency changesFinding from the Rio Grande bridge experiment
The change in frequency due to damage is smallg q y gFrequency increase was observedTemperature change (thermal gradient) has
l h f hcorrelation with frequency change.
Findings from other studiesFindings from other studiesDetectability depends on modesChange in single modal frequency does not locateChange in single modal frequency does not locate damageChanges in modal frequencies may indicate damage g q y glocation
Offshore plant monitoring started earlier. The tidal variation and tank contents have large influence on the
23
variation and tank contents have large influence on the dynamic behavior. Damage detection has been considered challenging
Damage detection based on damping changes
The change is larger than changes in frequenciesAs large as 80%(Agardh 1991)As large as 80%(Agardh 1991)
Large damping indicates energy consumption. sign of crack and other damage?sign of crack and other damage?Difficult to modelEstimation error is large.
There are reports indicating spatial difference in damping ratios due to structural damage.
24

Damping ratio and progressive damage
??
Damage detection based on mode shape changes
Mode shape changes as structural properties changes.
i di M d l A C i i (MAC)indices:Modal Assurance Criterion (MAC)
Sensitivity to damage is not necessarily high Various mode shape based indices have been proposed.The shape near the mode shape nodeSpatial derivative of mode shapeSpatial derivative of mode shapeStrain mode shapeSensitive modes ‐> high order modesM d h hMode shape phase
limitation: The number of measurement point is limitedlimitation: The number of measurement point is limited to capture mode shapes of continuous systems.
26
Recent studies in SHM
27
Recent studies in SHM
Research in the past has not resulted in sufficient performance evaluation⇒ efforts in each stepperformance evaluation⇒ efforts in each step
Measurement Sensing d t hi h l ti
Feature extractionAcceleration, strain, velocity
displacement, etc
dense measurement, high resolution,wide frequency range
The use of seismic record, traffic induced vibration and additional mass
FrequencyDampingMode shapes
vibration and additional mass
F t l i
Mode shapesVibration amplitude
Feature analysisComparison with design,
past measurement
Damage Locating Vector methodsSimulation considering vehicle‐bridgeinteraction
28
Judgmentpast measurement
Statistical analysis/wavelet,Non‐linear model
Detailed FEMComparison among similar structures

Dense and high‐resolution sensing using Laser Doppler vibrometer
The velocity of objects is y jmeasured using the Doppler effect of the laser
Characteristics・Non‐contact → up to 100 [m] (for steel)・High resolution → 0.3 μm/s・wide frequency range → 0~35kHz・scan large spatial area (spatial information)
scan angle (+‐ 15 degree )
29
dense and high resolution non‐contact vibration measurements are feasible
Experimental verificationSteel plate(400×300×2mm)
Dense measurement by scanning
horizontal :10 ptshorizontal :10 pts.vertical : 10 pts.
total:100 ptstotal:100 pts(spatially dense measurement)
Sampling frequency : 2000Hzdata points : 2048 p
Ambient vibration can be captured30
Ambient vibration can be captured
Steel plate mode shape
# of averaging: 10 100 300 FEM
1st mode
10 7Hz10.7Hz
14th
12.1Hz
14thmode
80580Hz
600Hz
31
600Hz
Identified mode shapes
32.23 Hz(34 18Hz)
10.74 Hz(12.07 Hz) 137.2 Hz
(135 0H )
112.8 Hz(121 0Hz)
66.89 Hz(76 01Hz)(34.18Hz) (135.0Hz)(121.0Hz)(76.01Hz)
Hi h d d lHigh order modes can also be identified
233.9Hz(234 5Hz)
345.7 Hz(336 7H )
238.8 Hz(260 9Hz)
32
(234.5Hz) (336.7Hz)(260.9Hz)

331. Long Distance Measurement for GZ New TV Tower(Under Construction) 09.01.08-09.01.14( )
広州
+Velocimeter
香港
Complete in 2009
• Using reflectors, distant measurement is feasibleg ,
Joint research with the Hong Kong Polytechnic University
Dense synchronized measurement using wireless sensors
Wireless smart sensors (WSS) allows dense and inexpensive measurements
Recent wireless smart sensor platform development
Difficulties toward full‐scale bridge vibration measurement
p p
Difficulties toward full scale bridge vibration measurementSensing capability (resolution, synchronization)Robustness (system reliability)Robustness (system reliability)Communication (RF range, packet loss)
34
Application to a full‐scale bridgeMain span 570 m49 d l h id lk49 nodes along the side walk.
Prompt installationInstallation :90min, Removal:45min by 3 persons
Application to a fullApplication to a full‐‐scale bridgescale bridgeCable : 8Deck : 22Pylon : 3Total : 33
Cable : 8Deck : 26Pylon : 3Total : 37Total : 33 Total : 37
In total, 420 channels of sensorsIn total, 420 channels of sensors
Vibration‐Sentry
A t
0Amemometer
interfaced with Wind‐Sentry
Nodes on pylon top Nodes on cables
Structural Dynamics Laboratory Structural Dynamics Laboratory && SISTeCSISTeC, KAIST, Korea, KAIST, Korea
py p(powered by solar cell)
Nodesunderneath deck Reference NodesNodes on pylons Nodes on cables
odes o cab es(powered by solar cell) Wind‐Sentry

37The use of traffic induced vibration
• Train-induced vibration was measured by LDV
No Reflectors
Measurement Point:
LDV大井競馬場前駅
38① Measured vibration
20s]
0
20
ity [m
m/
0 2 4 6 8
-20
Velo
ci
Time [sec]
Viaduct vibration estimate
① ②Time [sec] ① - ②
Correction
② Vibration of LDV itself m/s
] 20
mm
/s]
2
ocity
[mm
-20
0
LDV
eloc
ity [m
-2
0
Time [sec]
Velo
0 2 4 6 8
LDV
Ve
0 2 4 6 8
Time [sec]
Time [sec]velocimeter
39Estimation of Displacement
Load-Deflection DiagramFFT/Ω → Inverse FFT
Assumption: Displacement of
0000
Assumption: Displacement of start/end point is 0 Monorail car loading: 23t
VELOCITY
-1
0
-1
0
-1
0
-1
0
[mm
] 50
VELOCITY
-3
-2
-3
-2
-3
-2
-3
-2
cem
ent
0
-5
-4
-5
-4
-5
-4
-5
-4
Dis
plac
5mm-50
0 2 40 2 40 2 40 2 4
LDV enables to estimate theTime [sec]8 10 12
ー Girder A ー Girder B LDV enables to estimate the displacement for condition assessment
ー Girder A ー Girder B
ー Girder C - Girder D
SHM under traffic induced vibration:Vibration simulation considering bridge‐vehicle interaction
Condition of Shinkansen Bridge: Aging, subjected to increasedservice loads and service frequency.
To understand bridge vibration during train passage and to perform SHM utilizing the vibration, vehicle-bridge interaction analysis is needed.

SHM under traffic induced vibration:Vibration simulation considering bridge‐vehicle interaction
Bridge-vehicle interaction
vehicle interaction bridge
Mass, stiffness, damping
Sectional dimension
Mass, stiffness, damping
Dimension, materialSectional dimension
Control, break
Dimension, material
Irregularity of trackContact force
andcontact point
Connection method Track, sleeper and ballast
contact pointdisplacement
3D model with 27DOF FEM model
ABAQUS
41/50
ABAQUSMATLAB
Vehicle modelFrequencies
(Hz)1 375
Frequencies (Hz)
1 375
yϕc
Yc
k c
1.3751.4471.695
1.3751.4471.695
mc ksv csvksh csh
x
z
ϕcψc
Zcφc
Yw2 Yw1
ksv csvksh csh
k
mb2
z
mb1
ϕw2ψw2Zw2 φw2
ϕw1ψw1Zw1 φw1
kpv cpvkph cph
kpv cpvkph cph
Rail RABCD
mY(x,t)r(x)
Z 22
Yw22
φw22Z
Yw21
φw21 Z 12
Yw12
φw12Z
Yw11
φw11
Rail R’mw22
Y’(x,t)r’(x)
mw21mw12 mw11
Zw22 Zw21 Zw12 Zw11
42/50
27 DOF model
Track irregularityelevation irregularity (vertical)
rv3
4x 10-3
Vertical profile for left railVertical profile for right railHorizontal profile for left railHorizontal profile for right rail
1
2
(m)
alignment irregularity
cross irregularity-1
0
Irreg
ular
ity
rh 2rc
-3
-2
Measured track irregularity
440.44 440.45 440.46 440.47 440.48 440.49 440.5 440.51 440.52-4
Distance (km)
Track irregularity is the major excitation source for train-
Measured track irregularity
43/50
g y jvehicle interaction.
Numerical simulation
44