optical imaging techniques and applications
TRANSCRIPT
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
Optical Imaging
Techniques and Applications
Jason Geng, Ph.D.
Vice President
IEEE Intelligent Transportation Systems Society

2011 AAPM Annual Meeting, Vancouver, 7/31/2011
Outline
• Structured light 3D surface imaging concept
• Classification framework of structured light 3D surface
imaging techniques
• Temporal/multi-shot projection techniques
• Sequential Projection
• Spatial/single-shot projection techniques
• Continuously varying pattern projection
• Strip indexing
• Grid indexing
• Hybrid
• Application examples
• Conclusions
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
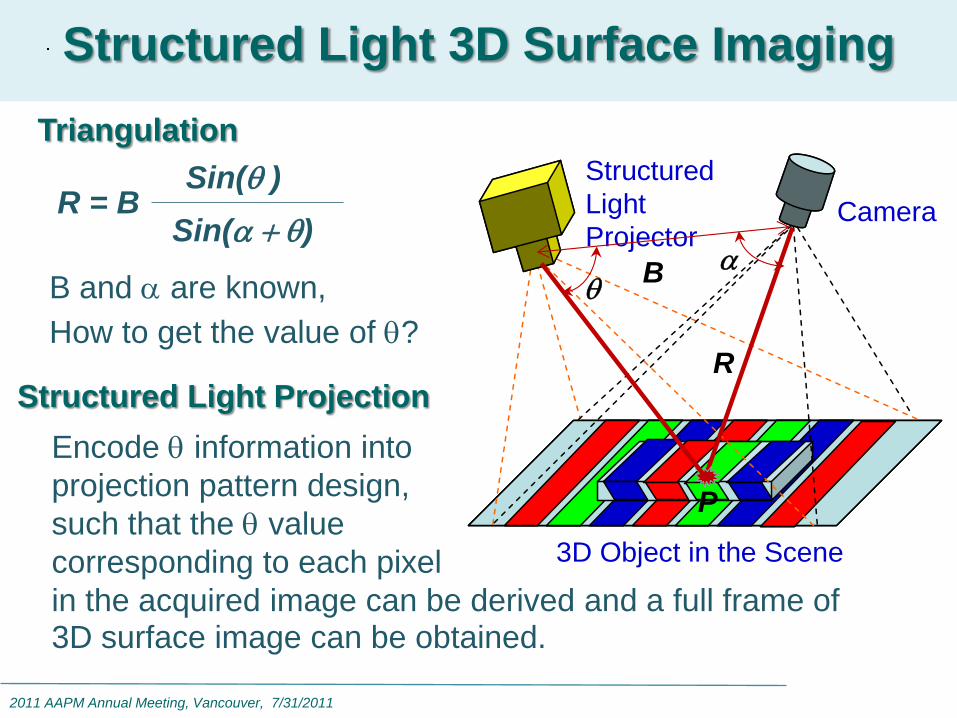
Structured Light 3D Surface Imaging
Structured
Light
ProjectorCamera
3D Object in the Scene
B
P
R
qa
Triangulation
Structured Light Projection
R = BSin(q )
Sin(a + q)
B and a are known,
How to get the value of q?
Encode q information into
projection pattern design,
such that the q value
corresponding to each pixel
in the acquired image can be derived and a full frame of 3D surface image can be obtained.
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
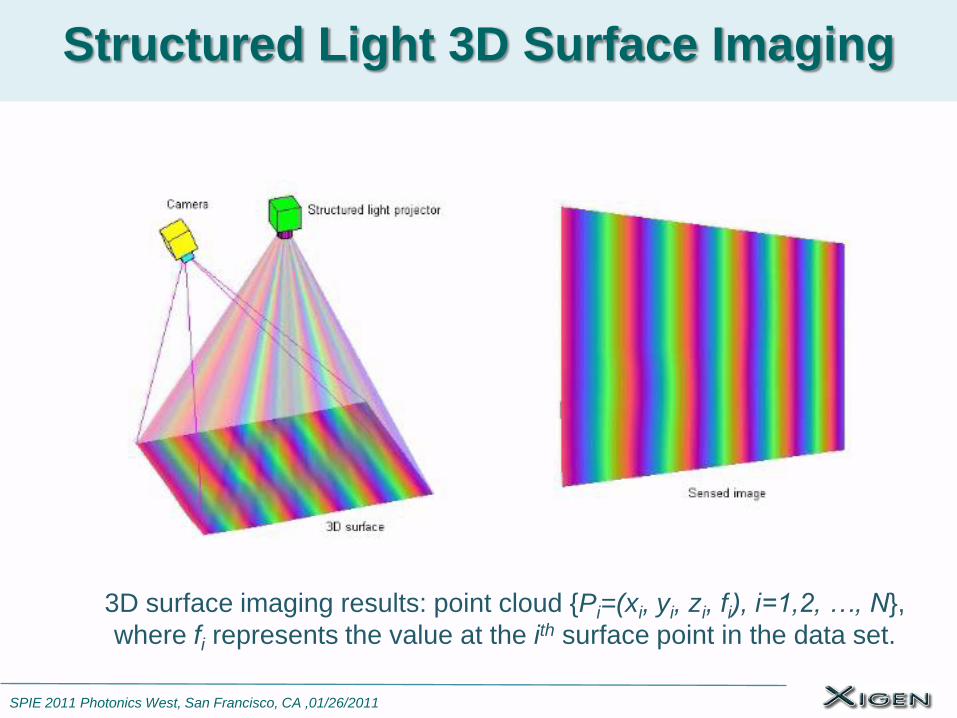
3D surface imaging results: point cloud {Pi=(xi, yi, zi, fi), i=1,2, …, N},
where fi represents the value at the ith surface point in the data set.
Structured Light 3D Surface Imaging
SPIE 2011 Photonics West, San Francisco, CA ,01/26/2011
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
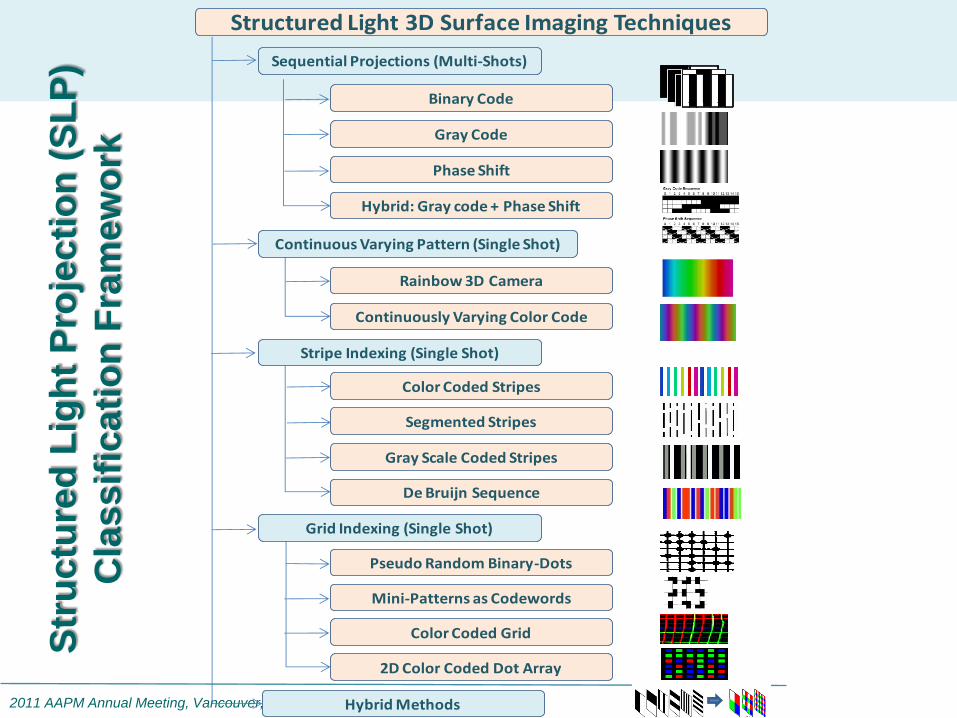
Structured Light 3D Surface Imaging Techniques
Sequential Projections (Multi-Shots)
Gray Code
Stripe Indexing (Single Shot)
Color Coded Stripes
Grid Indexing (Single Shot)
Binary Code
Phase Shift
Hybrid: Gray code + Phase Shift
Segmented Stripes
Pseudo Random Binary-Dots
Mini-Patterns as Codewords
Continuous Varying Pattern (Single Shot)
Rainbow 3D Camera
Continuously Varying Color Code
Gray Scale Coded Stripes
De Bruijn Sequence
Color Coded Grid
2D Color Coded Dot Array
Hybrid Methods
Str
uctu
red
Lig
ht
Pro
jec
tio
n (
SL
P)
Cla
ssif
ica
tio
n F
ram
ew
ork
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
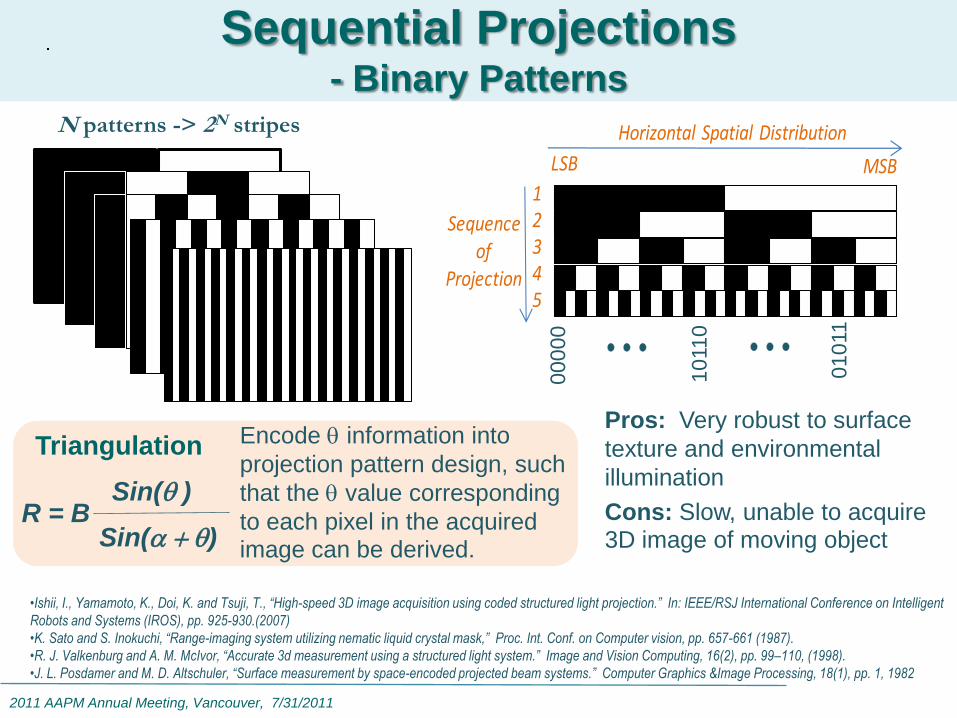
Sequential Projections - Binary Patterns
12345
LSB MSB
Horizontal Spatial Distribution
Sequence of
Projection
N patterns -> 2N stripes
•Ishii, I., Yamamoto, K., Doi, K. and Tsuji, T., “High-speed 3D image acquisition using coded structured light projection.” In: IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS), pp. 925-930.(2007)
•K. Sato and S. Inokuchi, “Range-imaging system utilizing nematic liquid crystal mask,” Proc. Int. Conf. on Computer vision, pp. 657-661 (1987).
•R. J. Valkenburg and A. M. McIvor, “Accurate 3d measurement using a structured light system.” Image and Vision Computing, 16(2), pp. 99–110, (1998).
•J. L. Posdamer and M. D. Altschuler, “Surface measurement by space-encoded projected beam systems.” Computer Graphics &Image Processing, 18(1), pp. 1, 1982
00
00
0
10110
01011
Encode q information into
projection pattern design, such
that the q value corresponding
to each pixel in the acquired image can be derived.
R = BSin(q )
Sin(a + q)
Triangulation Pros: Very robust to surface
texture and environmental
illumination
Cons: Slow, unable to acquire 3D image of moving object

2011 AAPM Annual Meeting, Vancouver, 7/31/2011
Sequential Projections - Gray Coding
N patterns -> MN stripes
•J. L. Posdamer and M. D. Altschuler, “Surface measurement by space-encoded projected beam systems.” Computer Graphics d Image Processing, 18(1), pp. 1, 1982.
•S. Inokuchi, K. Sato and F. Matsuda, “Range-imaging for 3-D object recognition,” Proc. Int. Conf. on Pattern Recognition, pp. 806-808 (1984).
•D. Caspi, N. Kiryati, and J. Shamir, “Range imaging with adaptive color structured light. Pattern Analysis and Machine Intelligence”, 20(5), pp.470–480, (1998).
•W. Krattenthaler, K. Mayer, and H. Duwe, “3D-surface measurement with coded light approach,” In Proceedings O¨ esterr. Arbeitsgem. MustererKennung, volume 12, pp.
103–114, (1993).
Pros: use M distinct levels of intensity (instead of only two in the binary code), to
produce unique coding, reduced number of required projection patterns, faster
N patterns -> MN stripes (v.s 2N stripes in binary)
Cons: Unable to acquire 3D image of moving object
M = 4
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
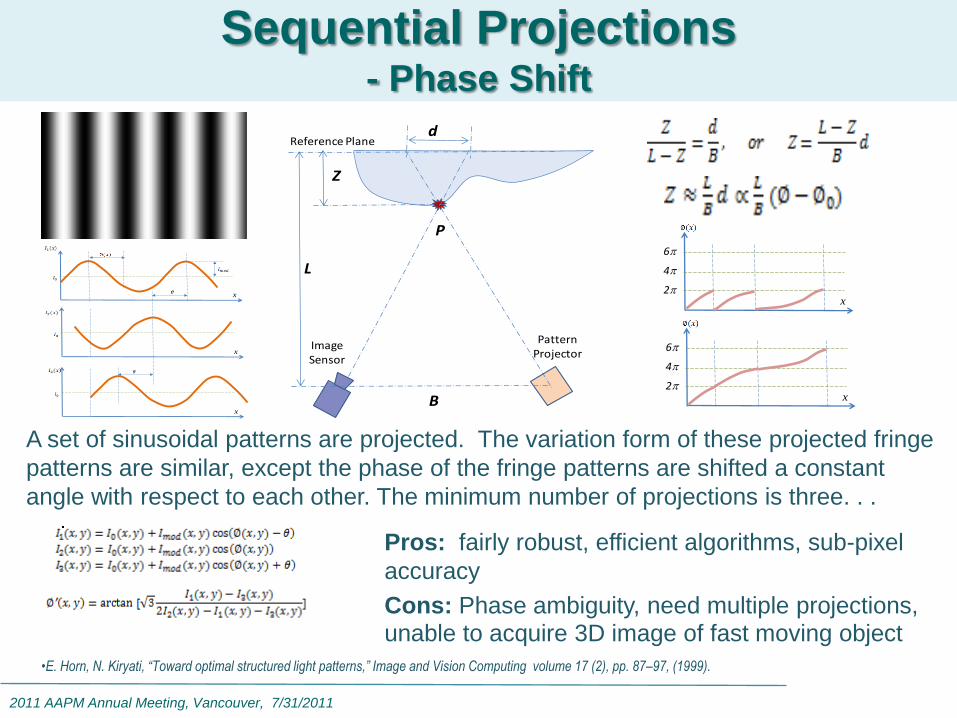
Sequential Projections - Phase Shift
x
x
x
x
6
4
2
x
6
4
2
B
Pattern Projector
Reference Plane
Image Sensor
P
Z
L
d
•E. Horn, N. Kiryati, “Toward optimal structured light patterns,” Image and Vision Computing volume 17 (2), pp. 87–97, (1999).
A set of sinusoidal patterns are projected. The variation form of these projected fringe
patterns are similar, except the phase of the fringe patterns are shifted a constant
angle with respect to each other. The minimum number of projections is three. . .
Pros: fairly robust, efficient algorithms, sub-pixel
accuracy
Cons: Phase ambiguity, need multiple projections, unable to acquire 3D image of fast moving object
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
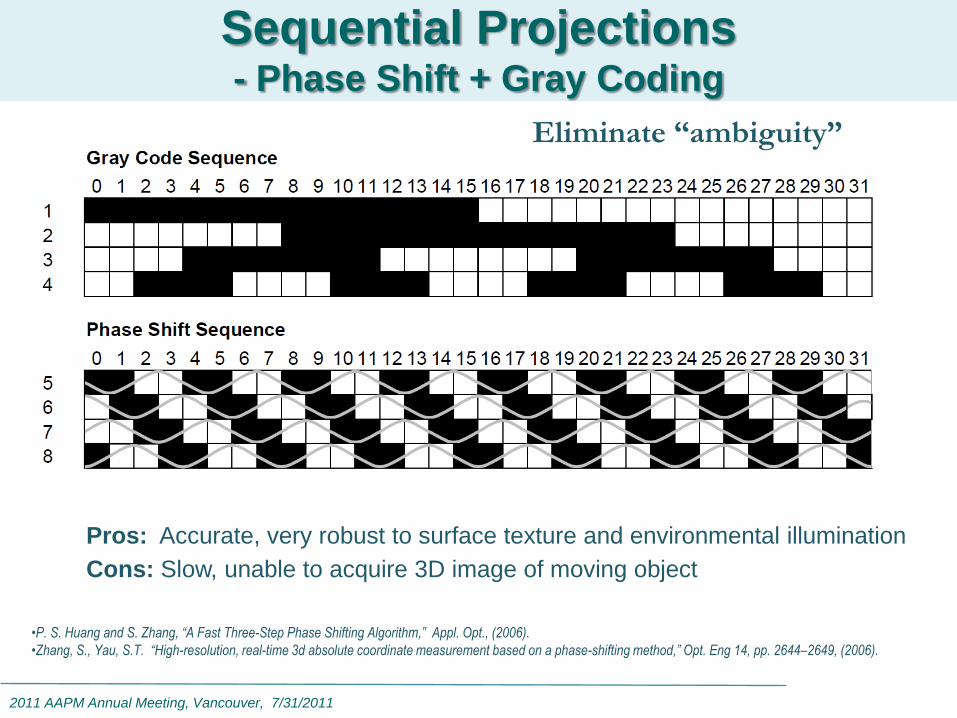
Sequential Projections - Phase Shift + Gray Coding
Eliminate “ambiguity”
•P. S. Huang and S. Zhang, “A Fast Three-Step Phase Shifting Algorithm,” Appl. Opt., (2006).
•Zhang, S., Yau, S.T. “High-resolution, real-time 3d absolute coordinate measurement based on a phase-shifting method,” Opt. Eng 14, pp. 2644–2649, (2006).
Pros: Accurate, very robust to surface texture and environmental illumination
Cons: Slow, unable to acquire 3D image of moving object
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
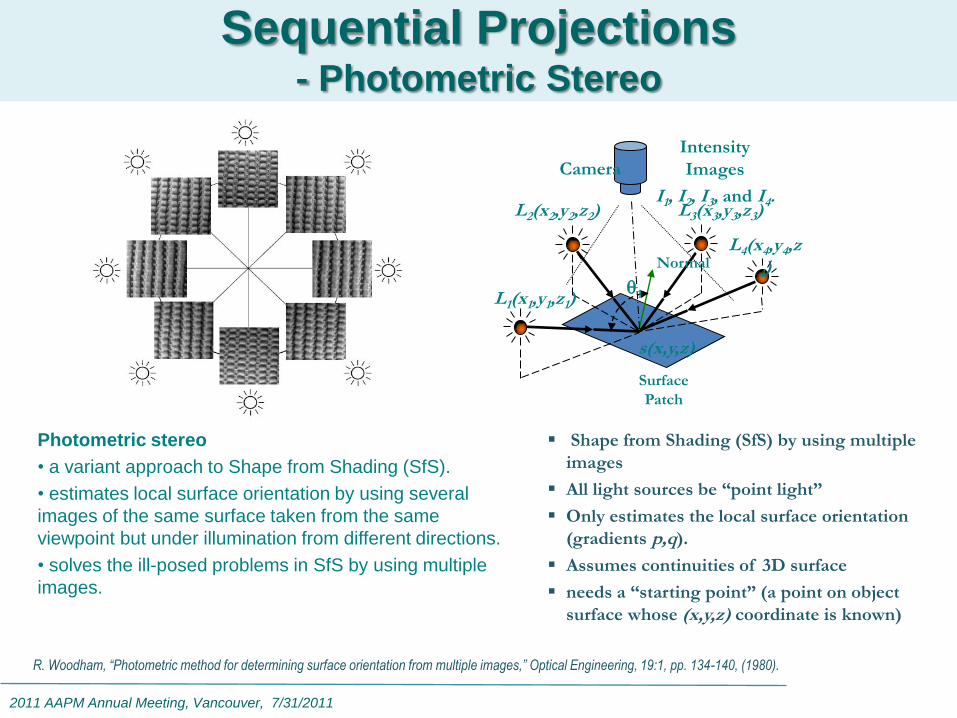
Sequential Projections - Photometric Stereo
R. Woodham, “Photometric method for determining surface orientation from multiple images,” Optical Engineering, 19:1, pp. 134-140, (1980).
Shape from Shading (SfS) by using multiple
images
All light sources be “point light”
Only estimates the local surface orientation
(gradients p,q).
Assumes continuities of 3D surface
needs a “starting point” (a point on object
surface whose (x,y,z) coordinate is known)
Photometric stereo
• a variant approach to Shape from Shading (SfS).
• estimates local surface orientation by using several
images of the same surface taken from the same
viewpoint but under illumination from different directions.
• solves the ill-posed problems in SfS by using multiple
images.
Camera
Surface
Patch
Normal
q1L1(x1,y1,z1)
L2(x2,y2,z2) L3(x3,y3,z3)
L4(x4,y4,z
4)
s(x,y,z)
Intensity
Images
I1, I2, I3, and I4.

2011 AAPM Annual Meeting, Vancouver, 7/31/2011
Single Shot- Rainbow 3D Camera
Z. J. Geng, “Rainbow three-dimensional camera: new concept of high-speed three-dimensional vision systems”, Opt. Eng. 35(2), pp. 376-383 (1996)
Elegant encoding scheme
High speed 3D imaging
“Infinite” resolution
Single shot – simple
implementation
Low-cost
Encode q information into
projection pattern design, such
that the q value corresponding
to each pixel in the acquired image can be derived.
R = BSin(q )
Sin(a + q)
Triangulation

2011 AAPM Annual Meeting, Vancouver, 7/31/2011
Single Shot- Spatially Varying Color Coding
Red Channel Intensity Variation Pattern
Green Channel Intensity Variation Pattern
Blue Channel Intensity Variation Pattern
Composite Three Color Saw-Tooth Pattern
Z. J. Geng, “Rainbow three-dimensional camera: new concept of high-speed three-dimensional vision systems”, Opt. Eng. 35(2), pp. 376-383 (1996)
Multiple cycles of variation
Improved sensitivity and accuracy
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
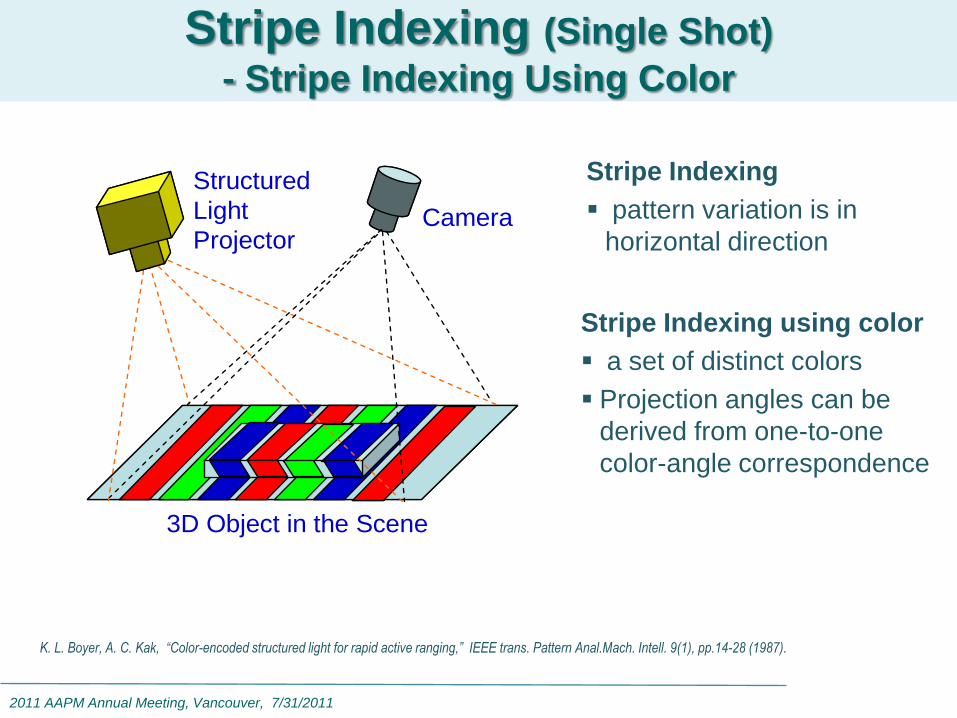
Stripe Indexing (Single Shot)
- Stripe Indexing Using Color
Structured
Light
ProjectorCamera
3D Object in the Scene
K. L. Boyer, A. C. Kak, “Color-encoded structured light for rapid active ranging,” IEEE trans. Pattern Anal.Mach. Intell. 9(1), pp.14-28 (1987).
Stripe Indexing
pattern variation is in
horizontal direction
Stripe Indexing using color
a set of distinct colors
Projection angles can be
derived from one-to-one
color-angle correspondence
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
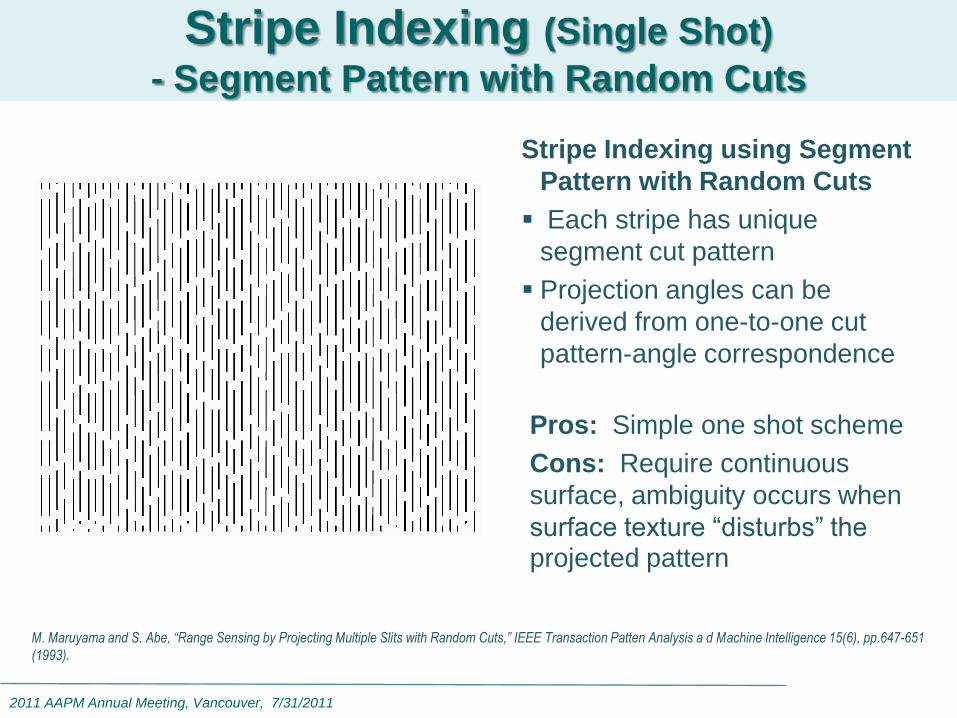
Stripe Indexing (Single Shot)
- Segment Pattern with Random Cuts
M. Maruyama and S. Abe, “Range Sensing by Projecting Multiple Slits with Random Cuts,” IEEE Transaction Patten Analysis a d Machine Intelligence 15(6), pp.647-651
(1993).
Stripe Indexing using Segment
Pattern with Random Cuts
Each stripe has unique
segment cut pattern
Projection angles can be
derived from one-to-one cut
pattern-angle correspondence
Pros: Simple one shot scheme
Cons: Require continuous
surface, ambiguity occurs when
surface texture “disturbs” the projected pattern

2011 AAPM Annual Meeting, Vancouver, 7/31/2011
Stripe Indexing (Single Shot)
- Repeated Grey Scale Pattern
N. G. Durdle, J. Thayyoor, V. J. Raso, “An improved structured light technique for surface reconstruction of the human trunk,” IEEE Canadian Conference on Electrical
and Computer Engineering, Vol. 2, pp. 874–877 (1998).
Stripe Indexing using Repeated
Gray Scale Pattern
Each stripe has unique grey
scale level
Projection angles can be
derived from one-to-one grey
scale level -angle
correspondence
Pros: Simple, one-shot scheme
Cons: ambiguity occurs when
surface texture “disturbs” the projected pattern
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
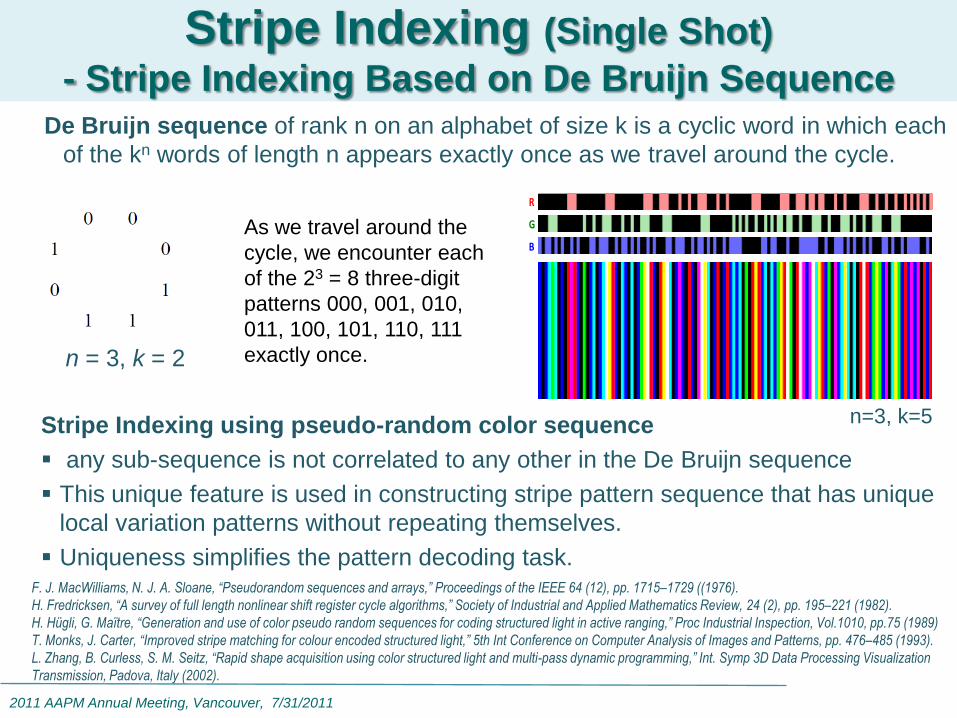
Stripe Indexing (Single Shot)
- Stripe Indexing Based on De Bruijn Sequence
F. J. MacWilliams, N. J. A. Sloane, “Pseudorandom sequences and arrays,” Proceedings of the IEEE 64 (12), pp. 1715–1729 ((1976).
H. Fredricksen, “A survey of full length nonlinear shift register cycle algorithms,” Society of Industrial and Applied Mathematics Review, 24 (2), pp. 195–221 (1982).
H. Hügli, G. Maïtre, “Generation and use of color pseudo random sequences for coding structured light in active ranging,” Proc Industrial Inspection, Vol.1010, pp.75 (1989)
T. Monks, J. Carter, “Improved stripe matching for colour encoded structured light,” 5th Int Conference on Computer Analysis of Images and Patterns, pp. 476–485 (1993).
L. Zhang, B. Curless, S. M. Seitz, “Rapid shape acquisition using color structured light and multi-pass dynamic programming,” Int. Symp 3D Data Processing Visualization
Transmission, Padova, Italy (2002).
R
G
B
Stripe Indexing using pseudo-random color sequence
any sub-sequence is not correlated to any other in the De Bruijn sequence
This unique feature is used in constructing stripe pattern sequence that has unique
local variation patterns without repeating themselves.
Uniqueness simplifies the pattern decoding task.
n = 3, k = 2
As we travel around the
cycle, we encounter each
of the 23 = 8 three-digit
patterns 000, 001, 010,
011, 100, 101, 110, 111
exactly once.
De Bruijn sequence of rank n on an alphabet of size k is a cyclic word in which each
of the kn words of length n appears exactly once as we travel around the cycle.
n=3, k=5
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
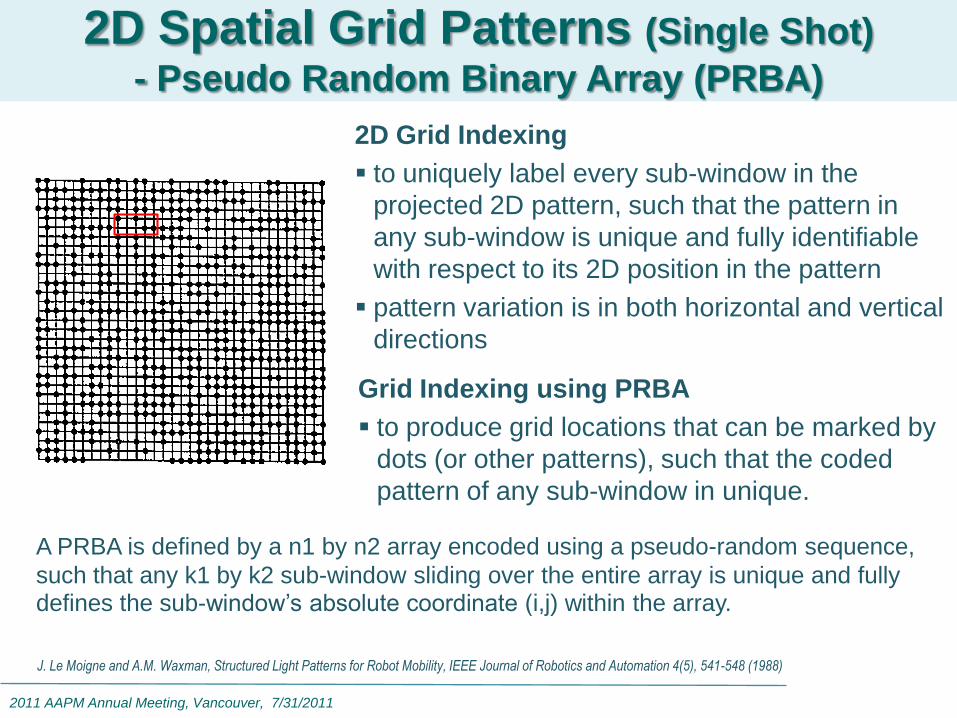
2D Spatial Grid Patterns (Single Shot)
- Pseudo Random Binary Array (PRBA)
J. Le Moigne and A.M. Waxman, Structured Light Patterns for Robot Mobility, IEEE Journal of Robotics and Automation 4(5), 541-548 (1988)
2D Grid Indexing
to uniquely label every sub-window in the
projected 2D pattern, such that the pattern in
any sub-window is unique and fully identifiable
with respect to its 2D position in the pattern
pattern variation is in both horizontal and vertical
directions
Grid Indexing using PRBA
to produce grid locations that can be marked by
dots (or other patterns), such that the coded
pattern of any sub-window in unique.
A PRBA is defined by a n1 by n2 array encoded using a pseudo-random sequence,
such that any k1 by k2 sub-window sliding over the entire array is unique and fully defines the sub-window’s absolute coordinate (i,j) within the array.

2011 AAPM Annual Meeting, Vancouver, 7/31/2011
2D Spatial Grid Patterns (Single Shot)
- Color Coded Grids
Petriu, E.M., Sakr, Z., Spoelder, H.J.W. and Moica, A., “Object recognition using pseudo-random color encoded structured light.” IEEE Instrumentation and
Measurement. v3. 1237-1241 (2000).
J. Pagès, J. Salvi and C. Matabosch. “Robust segmentation and decoding of a grid pattern for structured light.” 1st Iberian Conf Pattern Recognition/ Image
Analysis, IbPRIA pp 689-696, (2003)
Grid Indexing using colors
to color-code both vertical and
horizontal stripes.
Encoding schemes in two directions
can be same of different
There is no guarantee on the
uniqueness of sub-windows,
colored stripes in both directions can
help the decoding in most situations to
establish the correspondence.
The thin grid lines may not be as
reliable in pattern extraction as other
patterns (dots, squares, etc).
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
2D Spatial Patterns (Single Shot)
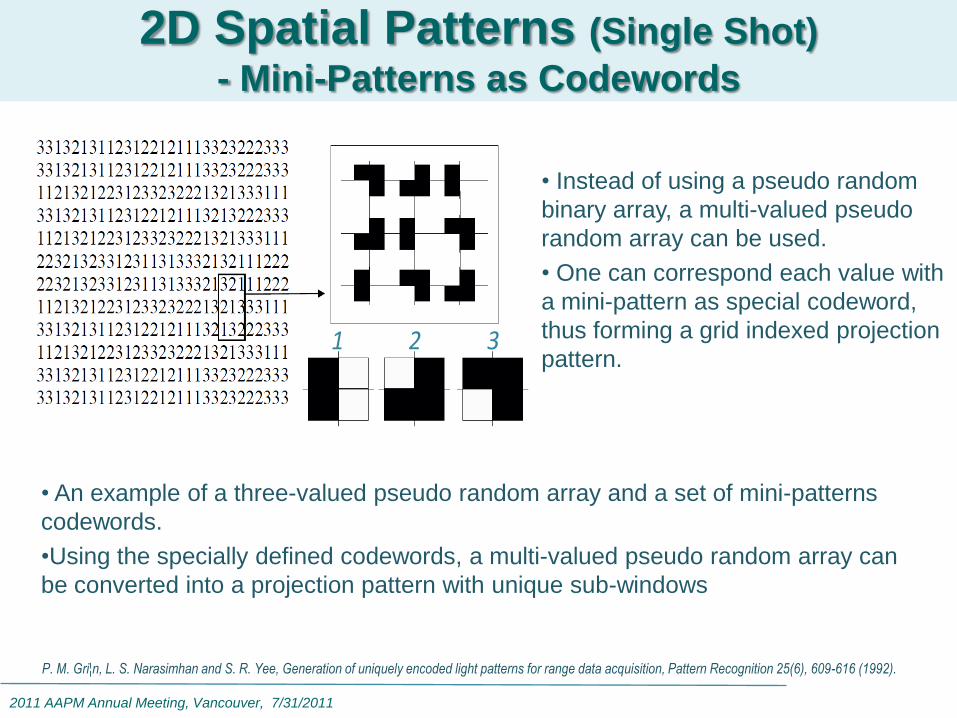
- Mini-Patterns as Codewords
P. M. Gri¦n, L. S. Narasimhan and S. R. Yee, Generation of uniquely encoded light patterns for range data acquisition, Pattern Recognition 25(6), 609-616 (1992).
1 2 3
• Instead of using a pseudo random
binary array, a multi-valued pseudo
random array can be used.
• One can correspond each value with
a mini-pattern as special codeword,
thus forming a grid indexed projection
pattern.
• An example of a three-valued pseudo random array and a set of mini-patterns
codewords.
•Using the specially defined codewords, a multi-valued pseudo random array can
be converted into a projection pattern with unique sub-windows
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
2D Spatial Patterns (Single Shot)
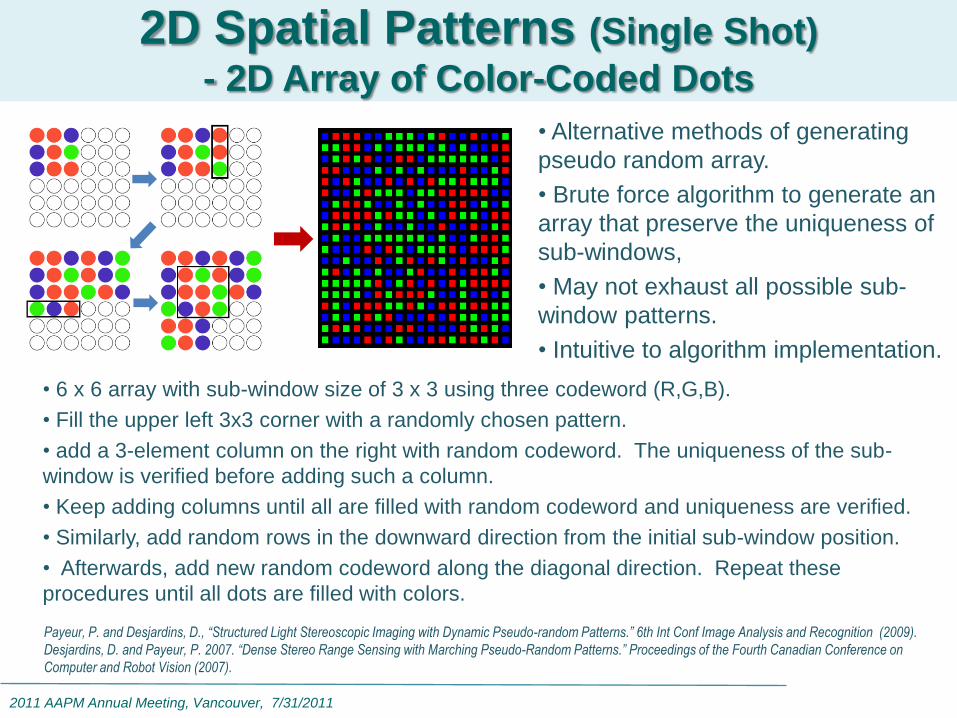
- 2D Array of Color-Coded Dots
Payeur, P. and Desjardins, D., “Structured Light Stereoscopic Imaging with Dynamic Pseudo-random Patterns.” 6th Int Conf Image Analysis and Recognition (2009).
Desjardins, D. and Payeur, P. 2007. “Dense Stereo Range Sensing with Marching Pseudo-Random Patterns.” Proceedings of the Fourth Canadian Conference on
Computer and Robot Vision (2007).
• 6 x 6 array with sub-window size of 3 x 3 using three codeword (R,G,B).
• Fill the upper left 3x3 corner with a randomly chosen pattern.
• add a 3-element column on the right with random codeword. The uniqueness of the sub-
window is verified before adding such a column.
• Keep adding columns until all are filled with random codeword and uniqueness are verified.
• Similarly, add random rows in the downward direction from the initial sub-window position.
• Afterwards, add new random codeword along the diagonal direction. Repeat these
procedures until all dots are filled with colors.
• Alternative methods of generating
pseudo random array.
• Brute force algorithm to generate an
array that preserve the uniqueness of
sub-windows,
• May not exhaust all possible sub-
window patterns.
• Intuitive to algorithm implementation.
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
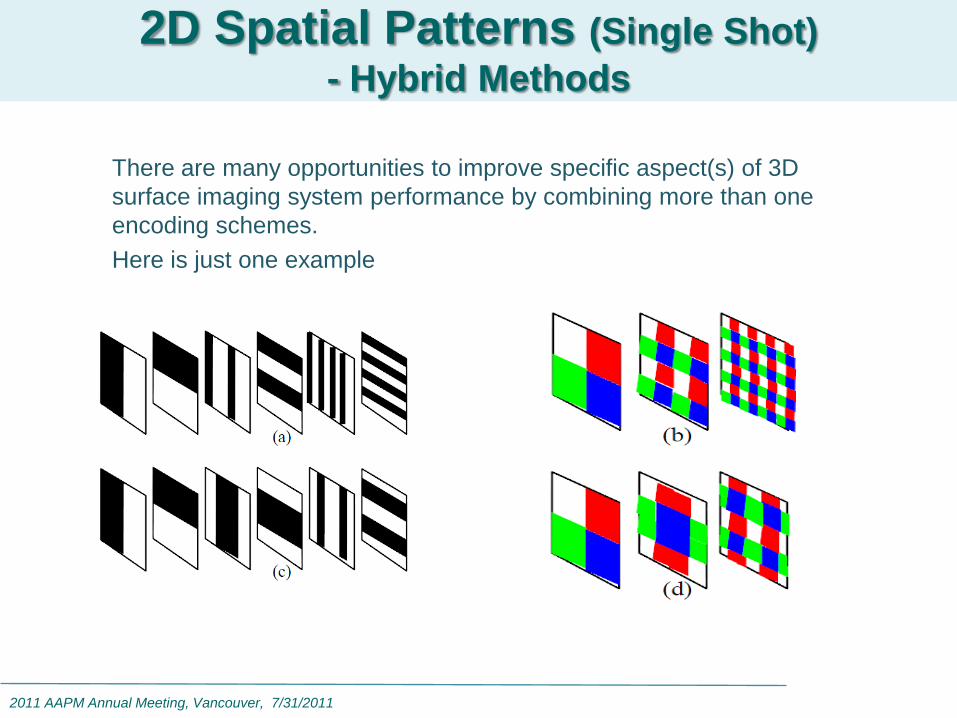
2D Spatial Patterns (Single Shot)
- Hybrid Methods
There are many opportunities to improve specific aspect(s) of 3D
surface imaging system performance by combining more than one
encoding schemes.
Here is just one example

2011 AAPM Annual Meeting, Vancouver, 7/31/2011
Sequential Projections (Multi-Shots)
Continuously Varying Pattern (Single Shot)
Stripe Indexing (Single Shot)
Grid Indexing (Single Shot)
Hybrid Methods
Summary of Typical SLP patterns
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
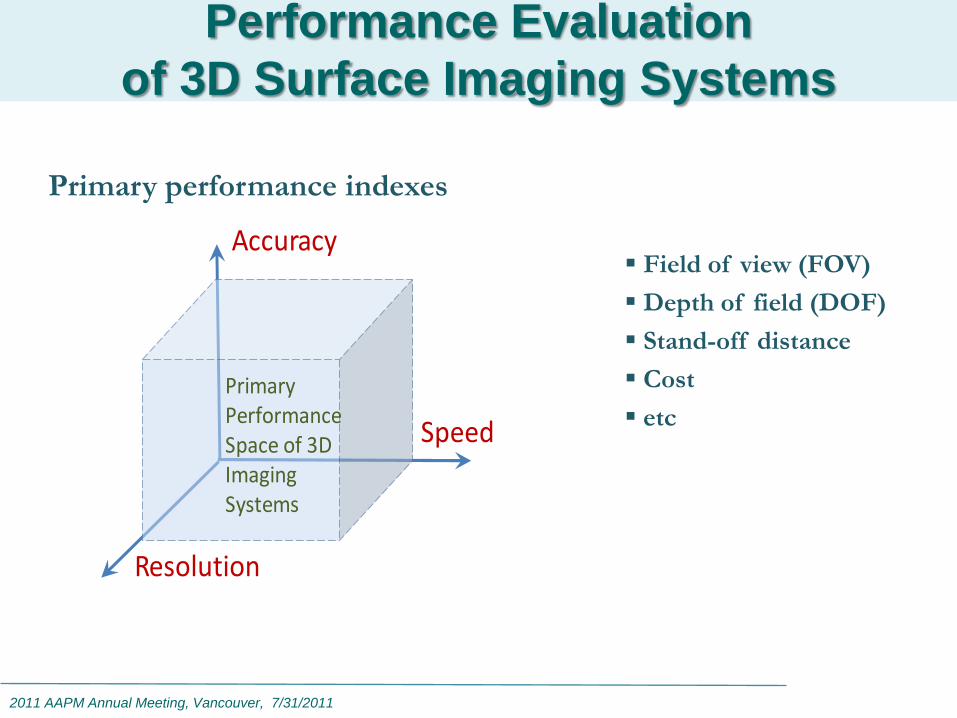
Performance Evaluation
of 3D Surface Imaging Systems
Accuracy
Speed
Resolution
Primary Performance Space of 3D Imaging Systems
Primary performance indexes
Field of view (FOV)
Depth of field (DOF)
Stand-off distance
Cost
etc
2011 AAPM Annual Meeting, Vancouver, 7/31/2011
Thank You !