methods for analysis and control of dynamical systems...
TRANSCRIPT
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Methods for analysis and control of dynamical systemsLecture 4: The root locus design method
O. Sename1
1Gipsa-lab, CNRS-INPG, [email protected]
www.gipsa-lab.fr/∼o.sename
5th February 2015
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Outline
Introduction
Concept
Rules
Dynamic compensationSpecificationsCase of PID controllersLead compensationLag compensation
Matlab examples
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
References
Some interesting books:I G. Franklin, J. Powell, A. Emami-Naeini, Feedback Control of
Dynamic Systems, Prentice Hall, 2005I R.C. Dorf and R.H. Bishop, Modern Control Systems, Prentice
Hall, USA, 2005.I P.Borne, G.Dauphin-Tanguy, J.P.Richard, F.Rotella, I.Zambettakis,
Analyse et Régulation des processus industriels. Tome 1:Régulation continue, Méthodes et pratiques de l’ingénieur, EditionsTechnip, 1993.
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Definition
Consider a simple one degree-of-freedom control structure, with G(s)the plant model, C(s) the controller, and K a constant gain, which is theparameter of the controller to be analyzed.Let us write
L(s) = C(s)G(s)
the loop-transfer function. Then the closed-loop transfer function is :
T (s) =KL(s)
1+KL(s)
and the solution of the characteristic equation 1+K .L(s) = 0 is:Then the solution of this equation is given by:
{s ∈ Cs.t .L(s) =− 1K}
which implies |KL(s)|= 1 and ∠KL(s) = π +2.k .π
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Definition (2)
Rewrite L as
L(s) =B(s)A(s)
where B(s) and A(s) are the numerator and denominator of L. Thenthe characteristic equation becomes:
A(s)+K .B(s) = 0
In all what follows:
B(s) =m
∏i=1
(s−zi )
A(s) =n
∏j=1
(s−pj )
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Definition (3)
The root locus of L(s) is the set of points in the s-plane where thephase of L(s) is π ({s ∈ Cs.t .L(s) =− 1
K })Then,
arg(B(s))−arg(A(s)) = π +2π(k −1)
If we define the angle to the test point from a zero as ψi and the angleto the test point from a pole as φi , then:
∑i
ψi −∑j
φj = π +2π(k −1)
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
First example
Consider the loop-transfer function:
L(s) =1
s(s+1)
Write the characteristic equation and calculate the set of solutions{s ∈ Cs.t .L(s) =− 1
K } as a function of K .Illustration in Matlab using rlocus(L) or rltool(L)
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Guidelines for the root locus plot
There are 6 major rules to sketch a root-locus.The beginning equation is :
n
∏j=1
(s−pj )+K .m
∏i=1
(s−zi ) = 0 (1)
Two different cases have to be considered:I K is positive and then ∠L(s) = π +2.k .πI K is negative and then ∠L(s) = 0+2.k .π
The number of branches (loci) is equal to the number of poles (i.e. thenumber of solutions of the characteristic equation).

Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Rule 1: departure and arrival
Rule 1The n branches of the locus start at the poles of L(s) and m of thesebranches end on the zeros of L(s)
Indeed:
1. When K = 0, the solution of equation (1) are the poles pj .
2. from L(s) =− 1K , as K → ∞, the equation reduces to L(s) = 0, i.e.
B(s) = 0 which corresponds to the zeros of L
Example :
L(s) =1
s(s2 +8s+32)
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Rule 2: branches on the real axis
Rule 2The loci are on the real axis to the left of an odd number of poles andzeros.
On the examples:
L(s) =1
s(s2 +8s+32)
L(s) =(s+1)
s(s+2)(s+4)2
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Rule 3: asymptotes
We consider here large s and K , i.e when they reaches infinity.
Rule 3Let N = n−m ≥ 0 of the loci are asymptotic to lines at angles φAcentered at a point on the real axis given by:
σA =∑pj −∑zi
n−m
with
φA =(2k +1)π
n−m, k = 0,1,2, . . . ,n−m
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Rule 4: angle of departures of the branch
Rule 4The angle of locus departure from a pole is the difference between thenet angle due to all other poles and zeros and the criterion angle of ±π.The angles of departure of a branch of the locus from a pole ofmultiplicity q is given by:
qφl ,dep = ∑ψi −∑j 6=l
φj −π−2π(k −1)
and the angles of arrival of a branch a a zero of multiplicity q is given by:
qψl ,arr = ∑i 6=l
ψi −∑φj +π +2π(k −1)

Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Rule 5
Rule 5The root locus crosses the jω axis at points where the Routh criterionshows a transition from roots in the left-plane to roots in the right halfplane.
Example: L(s) = 1s(s2+8s+32) .
Rouths3 1 32s2 8 Ks1 8×32−K
8 0s0 K
For K = 0, there is a root at s = 0.No RHP roots for 0 < K < 8×32 = 256.When K = 256 roots on the jω axis (ωc = 5.66).

Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Rule 6: breakaway point
Rule 6The equation to be solved can be rewritten as:
A(s)B(s)
=−K
which means that the set of solutions changes of direction (tangents)whenever d
ds (A(s)B(s) ) = 0
The locus will have multiple roots at points on the locus where thederivative is zero, or:
BdAds−A
dBds
= 0

Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Root locus for satellite attitude control with PD control
The characteristic equation is :
1+[kp +kd s]1s2 = 0
Assume kp/kd = α is known, and note K = kd . Then it leads
1+Ks+α
s2 = 0
I R1: There are 2 branches that start at s = 0 and 1 which ends ats =−α
I R2: The real axis to the left of s =−α is on the locusI R3: There is one asymptote (n-m=1) at σA = α of angle φA = π
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Example (cont.)
I R4: the angles of departure from the double pole at s = 0 are ±π/2I R5: Routh criterion:
s2 1 K .α
s1 K 0s0 K α .
which does not cross the imaginary axis.I R6: using B = s+α and A = s2 it leads that the breakaway points
stand at s = 0 and s =−2.α.
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
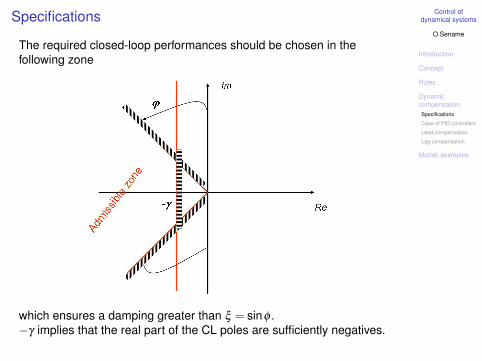
Specifications
The required closed-loop performances should be chosen in thefollowing zone
which ensures a damping greater than ξ = sinφ .−γ implies that the real part of the CL poles are sufficiently negatives.
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Specifications (2)
Some useful rules for selection the desired pole/zero locations (for asecond order system):
I Rise time : tr ' 1.8ωn
I Seetling time : ts ' 4.6ξ ωn
I Overshoot Mp = exp(−πξ/sqrt(1−ξ 2)):ξ = 0.3⇔Mp = 35%,ξ = 0.5⇔Mp = 16%,ξ = 0.7⇔Mp = 5%.
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
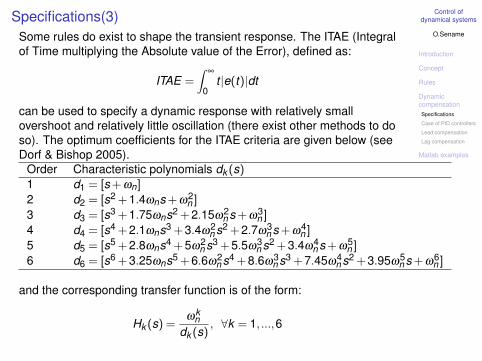
Specifications(3)Some rules do exist to shape the transient response. The ITAE (Integralof Time multiplying the Absolute value of the Error), defined as:
ITAE =∫
∞
0t |e(t)|dt
can be used to specify a dynamic response with relatively smallovershoot and relatively little oscillation (there exist other methods to doso). The optimum coefficients for the ITAE criteria are given below (seeDorf & Bishop 2005).
Order Characteristic polynomials dk (s)1 d1 = [s+ωn]
2 d2 = [s2 +1.4ωns+ω2n ]
3 d3 = [s3 +1.75ωns2 +2.15ω2n s+ω3
n ]
4 d4 = [s4 +2.1ωns3 +3.4ω2n s2 +2.7ω3
n s+ω4n ]
5 d5 = [s5 +2.8ωns4 +5ω2n s3 +5.5ω3
n s2 +3.4ω4n s+ω5
n ]
6 d6 = [s6 +3.25ωns5 +6.6ω2n s4 +8.6ω3
n s3 +7.45ω4n s2 +3.95ω5
n s+ω6n ]
and the corresponding transfer function is of the form:
Hk (s) =ωk
ndk (s)
, ∀k = 1, ...,6

Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Specifications(4)
0 2 4 6 8 10 12 14 160
0.2
0.4
0.6
0.8
1
1.2
NORMALIZED TIME ωn t
H1H2H3H4H5H6
STEP RESPONSE OF TRANSFER FUNCTIONSWITH ITAE CHARACTERISTIC POLYNOMIALS

Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
PID controller
A PID controller is given by:
C(s) = Kp(1+1
Ti s+Td s) = Kp +KD s+
KIs
For convenience it will be rewritten as :
C(s) = KD(s+z1)(s+z2)
s
which has one pole at the origine and two stable zeros.
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Lead compensation
C(s) = K (s+zs+p
)
with z < p .
I Derivative-type controller : if p is placed well outside the frequencyrange of the design, the controller looks like a PD controller.
I The effect of the zero is to move the locus to the left (towards morestable zones). To be chosen directly below the desired rootlocation.
I p should be located left far on the real axis. It should ensure thatthe total angle at the desired root location is π

Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Lag compensation
C(s) = K (s+zs+p
)
with z > p.I Integration-type controller:I p should be closed to the origine. z sufficiently far.I z/p is chosen to be between 3 and 10 (according to the need of
boosting the steady-state gain).
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Matlab example
Control of a small airplane (pitch attitude):
θ = G(s)(δ +Md )
where
G(s) =160(s+2.5)(s+0.7)
(s2 +5s+40)(s2 +0.03s+0.06)
θ is the pitch attitude, δ the elevator angle and Md the disturbancemoment .Specifications:
I rise time ≤ 1sec and overshoot less than 10%I Design an autopilot so that the steady state value of δ is zero for
an arbitrary constant moment.
Control ofdynamical systems
O.Sename
Introduction
Concept
Rules
DynamiccompensationSpecifications
Case of PID controllers
Lead compensation
Lag compensation
Matlab examples
Matlab example
tr ≤ 1sec implies ωn ≥ 1.8.Mp ≤ 0.1 implies ξ ' 0.6.Steps
I Polynomial controllerI lead CompensationI Lead-lag compensation