introduction to location discovery lecture 9 october 5, 2006 eeng 460a / cpsc 436 / enas 960...
Post on 22-Dec-2015
216 views
TRANSCRIPT

Introduction to Location Discovery Lecture 9 October 5, 2006
EENG 460a / CPSC 436 / ENAS 960 Networked Embedded Systems &
Sensor Networks
Andreas [email protected]
Office: AKW 212Tel 432-1275
Course Websitehttp://www.eng.yale.edu/enalab/courses/2006f/eeng460a

Lecture Outline
Programming assignment due next Tuesday• You should be making good progress with it!!!
Recap from last lecture Look at the multihop case Discuss an EKF solver Some words on bounds

Last Lecture Recap: Problem Formulation
Need to minimize the sum of squares of the residuals
The objective function is
This a non-linear optimization problem• Many ways to solve (e.g a forces formulation, gradient
descent methods etc
22,, )ˆ()ˆ( uiuiiuiu yyxxrf
2,min),( iuuu fyxF
Base Station 1
Base Station 3
Base Station 2
u

Two Possible Ways to Solve the Problem
1. Linearize by subtracting one equation from the rest
Solve the resulting set of linear equations
2. Linearize using Taylor Expansion

A Solution Suitable for an Embedded Processor
Linearize the measurement equations using Taylor expansion
where
Now this is in linear form
)( 22,, Oyxfr yixiiuiu
i
uii
i
uii r
yyy
r
xxx
ˆ,
ˆ
22 )ˆ()ˆ( uiuii yyxxr
zA

Solve using the Least Square Equation
The linearized equations in matrix form become
Now we can use the least squares equation to compute a correction to our initial estimate
Update the current position estimate
Repeat the same process until δ comes very close to 0
)(3
)(2
)(1
33
22
11
, ,u
u
u
y
x
f
f
f
z
yx
yx
yx
A
zAAA TT 1)(
yuuxuu yyxx ˆˆ and ˆˆ

The Multihop Problem
Beacon
Unkown Location
Randomly Deployed Sensor Network
Beacon nodes
• Localize nodes in an ad-hoc multihop network• Based on a set of inter-node distance measurements

Solving over multiple hops
Iterative Multilateration
Beacon node(known position)
Unknown node(known position)

Iterative Multilateration
Iterative Multilateration
ProblemsError accumulationMay get stuck!!!
% of initial beacons
Localized nodes
total nodes

Collaborative Mutlilateration
• All available measurements are used as constraints
• Solve for the positions of multiple unknowns simultaneously
• Catch: This is a non-linear optimization problem!
• How do we solve this?
Known position
Uknown position

Problem Formulation
214
2141,41,4
254
2545,45,4
234
2343,43,4
253
2535,35,3
232
2323,23,2
)ˆ()ˆ(
)ˆ()ˆ(
)ˆˆ()ˆˆ(
)ˆ()ˆ(
)ˆ()ˆ(
yyxxRf
yyxxRf
yyxxRf
yyxxRf
yyxxRf
2,4433 min)ˆ,ˆ,ˆ,ˆ( jifyxyxF
The objective function is
Can be solved using iterative least squares utilizing the initial Estimates from phase 2 - we use an Extended Kalman Filter
1
2
3 4
5
6

Things to look out for…
Iterative methods and gradient decent methods are not guaranteed to converge to the global minimum, it is very easy to get stack in local minima• To converge properly, you need to provide a
good set of initial estimates. In general this is not a problem with the 1-
hop setups but it becomes a big problem with multihop setups

How do we solve this problem?
In an embedded system? Backboard material here… One possible solution would use a Kalman
Filter• This was found to work well in practice, can
“easily” implemented on an embedded processor
[more details see Savvides03]

Computation Options
1. CentralizedOnly one node computes
2. Locally Centralized Some of unknown nodes compute
3. (Fully) DistributedEvery unknown node computes
Computing Nodes
• Each approach may be appropriate for a different application• Centralized approaches require routing and leader election• Fully distributed approach does not have this requirement
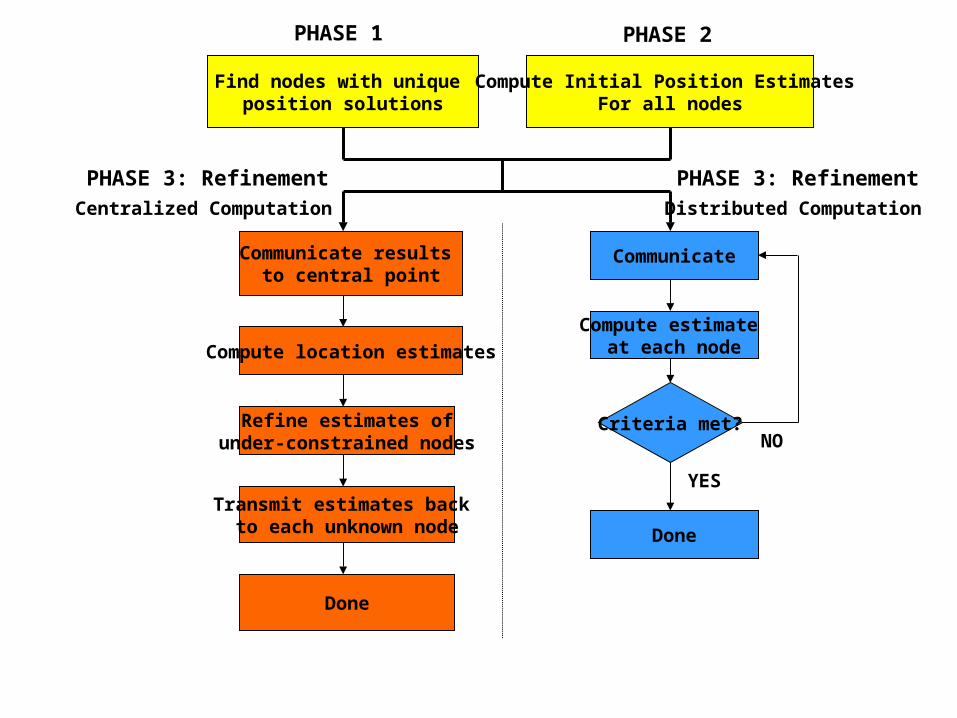
Find nodes with unique position solutions
Compute Initial Position Estimates For all nodes
Compute location estimates
Compute estimate at each node
Communicate
Criteria met?
YES
NO
Communicate results to central point
Transmit estimates back to each unknown node
Refine estimates ofunder-constrained nodes
Done
Done
Centralized Computation Distributed Computation
PHASE 1 PHASE 2
PHASE 3: Refinement PHASE 3: Refinement

Initial Estimates (Phase 2)
Use the accurate distance measurements to impose constraints in the x and y coordinates – bounding box
Use the distance to a beacon as bounds on the x and y coordinates
a
a ax
U

Initial Estimates (Phase 2)
Use the accurate distance measurements to impose constraints in the x and y coordinates – bounding box
Use the distance to a beacon as bounds on the x and y coordinates
Do the same for beacons that are multiple hops away
Select the most constraining bounds
a
b
c
b+c b+c
X
Y
U
U is between [Y-(b+c)] and [X+a]

Initial Estimates (Phase 2)
Use the accurate distance measurements to impose constraints in the x and y coordinates – bounding box
Use the distance to a beacon as bounds on the x and y coordinates
Do the same for beacons that are multiple hops away
Select the most constraining bounds
Set the center of the bounding box as the initial estimate
a
a a
b
c
b+c b+c
X
Y
U

Initial Estimates (Phase 2)
Example:• 4 beacons• 16 unknowns
To get good initial estimates, beacons should be placed on the perimeter of the network
Observation: If the unknown nodes are outside the beacon perimeter then initial estimates are on or very close to the convex hull of the beacons

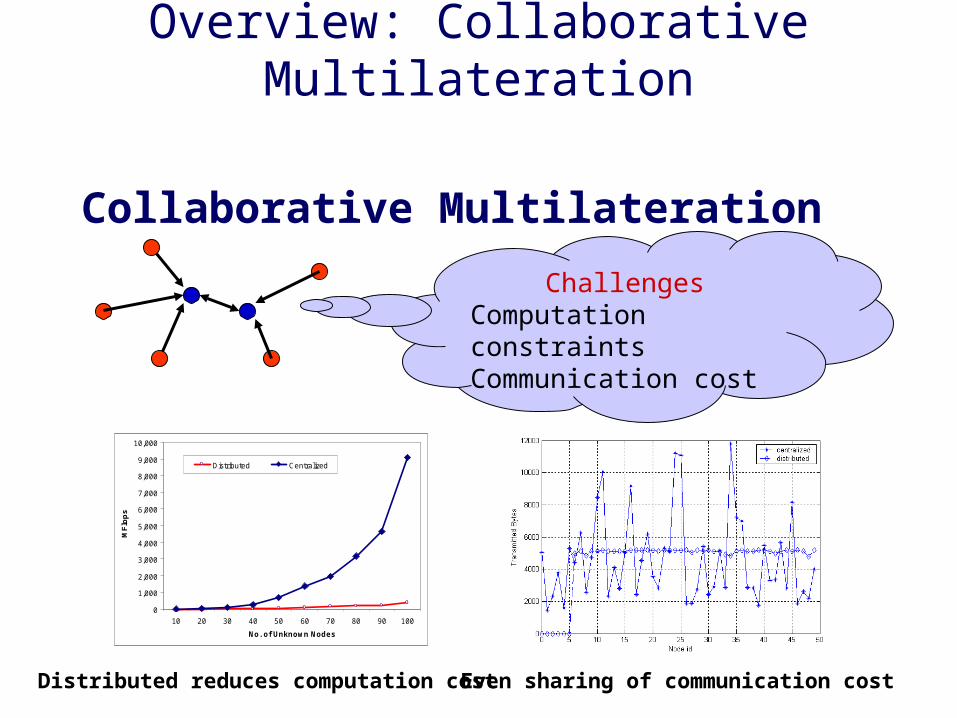
Overview: Collaborative Multilateration
Collaborative Multilateration
ChallengesComputation constraintsCommunication cost
1
2
3
45
2
1
3
45
1
2
3
45
Overview: Collaborative Multilateration
Collaborative Multilateration
ChallengesComputation constraintsCommunication cost
0
1,000
2,000
3,000
4,000
5,000
6,000
7,000
8,000
9,000
10,000
10 20 30 40 50 60 70 80 90 100
No. of Unknown Nodes
MF
lop
s
Distributed Centralized
Distributed reduces computation cost Even sharing of communication cost

Satisfy Global Constraints with Local Computation
From SensorSim simulation 40 nodes, 4 beacons IEEE 802.11 MAC 10Kbps radio Average 6 neighbors per node
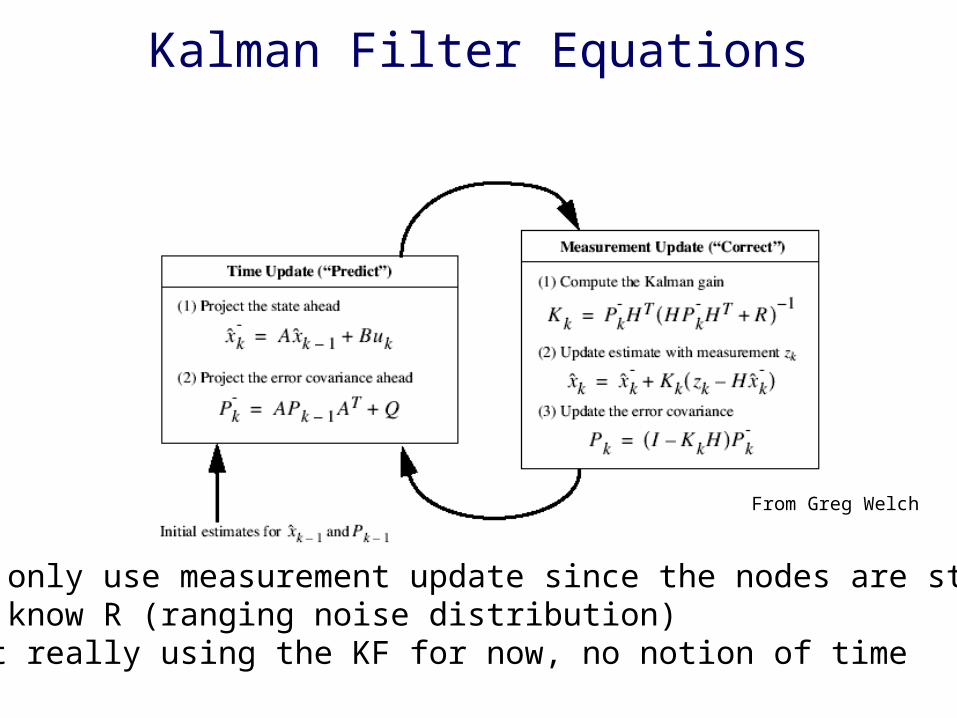
Kalman Filter Equations
From Greg Welch
• We only use measurement update since the nodes are static• We know R (ranging noise distribution)• Not really using the KF for now, no notion of time

Global Kalman Filter
Matrices grow with density and number of nodes => so does computation cost
Computation is not feasible on small processors with limited computation and memory
00)5(ˆ)5(ˆ
00)4(ˆ)4(ˆ
)3(ˆ)3(ˆ)3(ˆ)3(ˆ
00)2(ˆ)2(ˆ
)1(ˆ)1(ˆ00
5454
44
34344343
5353
3232
kk
kk
kkkk
kk
kk
z
yey
z
xexz
yey
z
xexz
eyey
z
exex
z
eyey
z
exexz
yey
z
xexz
eyy
z
exx
H # of edges
# of unknown nodes x 2
254
254
214
214
243
243
253
253
232
232
)()(
)()(
)()(
)()(
)()(
ˆ
yeyxex
yeyxex
eyeyexex
yeyxex
eyyexx
z Tk

Kalman Filter Equations
From Greg Welch
http://www.cs.unc.edu/~welch/media/pdf/kalman_intro.pdf
KF, EKF & SCAAT
“A Kalman Filter(KF) is a recursive mathematical procedure for least-squares estimation of a linear system”
Follows a predictor-corrector model An Extended Kalman Filter is a KF variant
of non-linear systems A SCAAT Kalman Filter operates on a
single measurement at a time.

SCAAT Kalman Filter
Proposed by Greg Welsh and Gary Bishop at UNC in 1997
Used in Hi-Ball Optoelectronic Tracker System
[Slide created from Welsh & Bishop, “SCAAT: Incremental Tracking with Incomplete Information”, Sigraph 97]

SCAAT Kalman Filter
Single-constraint-at-a-time(SCAAT)
• Process one measurement at a time
C- # of independent constraints for a unique solution
N – # of constraints used to derive an estimate
Nind - # of independent constraints
[Slide from Welsh & Bishop, “SCAAT: Incremental Tracking with Incomplete Information”, Sigraph 97]

SCAAT Aims at Temporal Improvements
Computation is faster KF matrices H, x and z are smaller The state prediction model described by
matrix A needs to change
Example system that uses all measurements at once

Beware of Solution Uniqueness Requirements
In a 2D scenario a network is uniquely localizable if:1. It belongs to a subgraph that is redundantly rigid
2. The subgraph is 3-connected
3. It contains at least 3 beacons
More details in future lectures
Nodes can be exchanged without violating the measurement constraints!!!
[conditions from Goldenberg04]

Does this solve the problem?
No! Several other challenges Solution depends on
• Problem setupo Infrastructure assisted (beacons), fully ad-hoc & beaconless, hybrid
• Measurement technologyo Distances vs. angles, acoustic vs. rf, connectivity based, proximity basedo The underlying measurement error distribution changes with each technology
The algorithm will also change• Fully distributed computation or centralized• How big is the network and what networking support do you have to solve
the problem?• Mobile vs. static scenarios• Many other possibilities and many different approaches
More next time…

Fundamental Behaviors and Trends
What is the fundamental error behavior?Measurement technology perspective
• Acoustic vs. RF ToF (2cm – 1.5m measurement accuracy)
• Distances vs. Angules
Deployment - what density?Scalability How does error propagate?Beacon density & beacon position uncertaintyIntrinsic vs. Extrinsic Error Component

Estimated Location Error Decomposition
PositionError
ChannelEffects
ComputationError
SetupError
Induced by intrinsic measurement error

Cramer Rao Bound Analysis
Cramer-Rao Bound Analysis on carefully controlled scenarios• Classical result from statistics that gives a lower bound
on the error covariance matrix of an unbiased estimate
Assuming White Gaussian Measurement Error Related work
• N. Patwari et. al, “Relative Location Estimation in Wireless Sensor Networks”

Density Effects
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.410
-1
100
101
102
angle measurementsdistance measurements
Density (node/m2)
RM
S L
ocat
ion
Err
or
20mm distance measurement certainty == 0.27 angular certainty
100
101
102
103
10-1
100
101
102
103
104
distancesangles
Range Error Scaling Factor
RM
S L
ocat
i on
Err
or/s
igm
a
Range Tangential Error
Results from Cramer-Rao Bound Simulations based on White Gaussian Error
m/rad
m/m

Density Effects with Different Ranging Technologies
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.80
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Ranging Error Variance(m)
D=0.030D=0.035D=0.040D=0.045D=0.050D=0.055
RMS Error(m)
6 neighbors
12 neighbors

Network Scalability
x-coordinate(m) y-coordinate(m)
RM
S L
o cat
ion
Err
or x
10
Error propagation on a hexagon scenario (angle measurement)Rate of error propagation faster with distance measurements but Much smaller magnitude than angles

More Observations on Network Scalability…
Performance degrades gracefully as the number of unknown nodes increases.
Increasing the number of beacon nodes does not make a significant improvement
Error in beacons results in an overall translation of the network
Error due to geometry is the major component in propagated error