industrialrobotics - lar-deis home page
TRANSCRIPT
Industrial Robotics
Claudio Melchiorri
Dipartimento di Ingegneria dell’Energia Elettrica e dell’Informazione (DEI)
Universita di Bologna
email: [email protected]
C. Melchiorri (DEI) Industrial Robotics 1 / 16

Industrial Robotics - Overview Introduction
Week schedule - Foundations of Industrial Robotics T
Monday Tuesday Wednesday Thursday Friday
9-10 3.1 L 4.1 L10-11 3.1 L 4.1 L11-12 3.1 E12-1313-14
14-1515-1616-1717-18
Material at:http://www-lar.deis.unibo.it/people/cmelchiorri/foundations robotics.html
Oral exams. Dates (AlmaEsami):1 12 June, 2014
2 26 June, 2014
3 17 July, 2014
C. Melchiorri (DEI) Industrial Robotics 2 / 16
Industrial Robotics - Overview Introduction
Introduction
Courses in Robotics @ UniBo
Foundations of Industrial RoboticsBSc level (Laurea in Ingegneria dell’Automazione / Automation Engineering)
Robotica Industriale MMaster level (Laurea magistrale in Ingegneria dell’Automazione)
Dinamica dei Robot MMaster level (Laurea magistrale in Ingegneria dell’Automazione / IngegneriaMeccanica)
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
An international curriculum in Automation Engineering (MSc degree in AE) @UNIBO in Academic Year 2012-13.
Students can apply for two years in Bologna (courses in English).
Interested students (a specific request must be presented) may obtain a DoubleDegree (Tongji University, Shanghai, China).
C. Melchiorri (DEI) Industrial Robotics 3 / 16
Industrial Robotics - Overview Introduction
Introduction
Foundations of Industrial Robotics
ROBOT:
industrial definition (RIA = Robotic Institute of America):
re-programmable multi-functional manipulator designed tomove materials, parts, tools, or specialized devices throughvariable programmed motions for the performance of avariety of tasks, which also acquire information from theenvironment and move intelligently in response
more general definition (“visionary”):
intelligent connection between perception and action
C. Melchiorri (DEI) Industrial Robotics 4 / 16
Industrial Robotics - Overview Introduction
Introduction
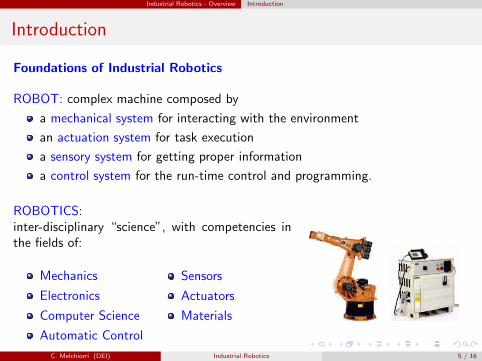
Foundations of Industrial Robotics
ROBOT: complex machine composed by
a mechanical system for interacting with the environment
an actuation system for task execution
a sensory system for getting proper information
a control system for the run-time control and programming.
ROBOTICS:inter-disciplinary “science”, with competencies inthe fields of:
Mechanics
Electronics
Computer Science
Automatic Control
Sensors
Actuators
Materials
C. Melchiorri (DEI) Industrial Robotics 5 / 16
Industrial Robotics - Overview Introduction
Introduction
Foundations of Industrial Robotics
1 Industrial Automation & Robotics
A brief introduction to roboticsStructure and main components of industrial robotsSensors & Actuators
2 Rigid Body Kinematics, Homogeneous Transformations
Rigid bodies and their representation in 3DHomogeneous coordinate framesHomogenous transformationsCoordinate transformations for velocities and force
3 Kinematic Model of Industrial Manipulators
Direct kinematic modelInverse kinematic modelDifferential kinematics and Statics: the JacobianWorkspace
C. Melchiorri (DEI) Industrial Robotics 6 / 16
Industrial Robotics - Overview Introduction
Introduction
Foundations of Industrial Robotics
4 Dynamic Model of Industrial Manipulators
Euler-Lagrange modelNewton-Euler model
5 Trajectory planning
Joint space trajectoriesOperational space trajectories
6 Robot Control
Position control in the joint spaceForce control
7 Programming
Robot control systemsProgramming languages
C. Melchiorri (DEI) Industrial Robotics 7 / 16
Industrial Robotics - Overview Introduction
Introduction
Foundations of Industrial Robotics
Advisable to have knowledge of:
Rigid Body Dynamics
Automatic Control
Control System Technologies
Course material:
Course notes: available in my website
Textbook: B. Siciliano, L. Sciavicco, L. Villani, G.Oriolo: Robotics: Modelling, Planning andControl, Springer, 2009
C. Melchiorri (DEI) Industrial Robotics 8 / 16

A short robotics history
A short robotics history
Robot: the name derives from the slavic word rob-ota (“work”), used to indicate artificial humanlikecreatures built for being inexpensive workers in thetheater play Rossum’s Universal Robots (R.U.R.)written by Karel Capek in 1920 and translated inEnglish.
C. Melchiorri (DEI) Industrial Robotics 9 / 16

A short robotics history
A short robotics history
• Metropolis (1926): first movie with robots (Fritz Lang, Germany)
• Electro and Spark (1939): New York World Fair, the robot could walk and talk
Electro
C. Melchiorri (DEI) Industrial Robotics 10 / 16
A short robotics history
A short robotics history
• Laws of Robotics (I. Asimov - 1942)
1 A robot may not injure a human being or,through inaction, allow a human being to cometo harm
2 A robot must obey orders given to it by humanbeings, except where such orders would conflictwith the First Law
3 A robot must protect its own existence as longas such protection does not conflict with theFirst or Second Law
C. Melchiorri (DEI) Industrial Robotics 11 / 16

A short robotics history
A short robotics history
1750 (ca): J. de Vaucanson builds several mechanical dolls, withdimensions similar to the human ones and able to play music
1801: J. Jacquard fabricates the ‘Jacquard loom’, a programmablemachine used to weave cloths
1892: S. Babbit (U.S.A.) builds a motorized crane with a gripperto be used in a furnace
1938: W. Pollard and H. Roselund (U.S.A.) design aprogrammable painting mechanism for the firm De Vilbiss
1946: G.C. Devol (U.S.A.) develops a magnetic memory device tocontrol a mechanical machine (patent in 1952)
1946: first computers: ENIAC at the University of Pensylvania(J.P. Eckert e J. Mauchly), and WHIRLWIND al M.I.T.
1948: N. Wiener (M.I.T., U.S.A.) writes “Cybernetics”, a bookdealing with the concepts of communication and control ofelectronic, mechanic and biological systems
1951: telemanipulation devices used for radioactive material,patents of Goertz (France - 1954) and Bergsland (1958)
1952: first prototype of numeric control machine (MIT).Programming language APT (Automatically Programmed Tool)developed in 1961
1954: C.W. Kenward (UK) presents the patent for a robot,released in 1957
1954: G.C. Devol design a “programmable pick-and-placemechanism”, patented in 1961. Devol proposes the name“Universal Automation” i.e. UNIMATION, name of the firstrobotic industry
1959: first commercial robot by Planet Corporation. It wascontrolled by mechanical cams
1960: first robot UNIMATE, based on the “programmablepick-and-place mechanism” Devol’s design
1961: robot UNIMATE installed at the Ford Motor Company
C. Melchiorri (DEI) Industrial Robotics 12 / 16
A short robotics history
A short robotics history
• Ray Goertz: first robotic telemanipulation of radioactive material (1951)
Ray Goertz
C. Melchiorri (DEI) Industrial Robotics 13 / 16

A short robotics history
A short robotics history
1961: robot UNIMATE installed at the Ford Motor Company
1966: the Norwegian company TRALLFA builds a robot for spraypainting
1968: the Stanford Research Institute, SRI, develops Shakey, amobile robot with a vision system and tactile sensors
1971: the Stanford University builds the STANFORD ARM, amechanical arm with electrical actuation
1973: SRI develops WAVE, the first programming language
1974: AL (Assembly Language). From WAVE and AL, thecommercial programming language VAL has been developed(Unimation, V. Scheinmann and B. Shimano)
1974: ASEA first electric actuation robot IRb6
1974: CINCINNATI MILACRON first computer-controlled robot,the T3 (The Tomorrow Tool)
1975: OLIVETTI commercializes the SIGMA robot, for assemblyoperations; one of the first robot applications in this field
1976: robot manipulators are used in the Viking 1 and 2 spacemissions on Mars
C. Melchiorri (DEI) Industrial Robotics 14 / 16

A short robotics history
A short robotics history
1976: the RCC (Remote Center Compliance) device is developedin the Charles Stark Draper Labs, MA, USA
1978: Unimation developes the PUMA (Programmable UniversalMachine for Assembly) robot
1979: the SCARA (Selective Compliance Arm for RoboticAssembly) robot is developed at the Yamanashi University, J.
1981: “direct-drive” robot developed by the Carnegie-MellonUniversity
1982: IBM cartesian robot RS-1 for assembly (programminglanguage: AML).
1983: Firm Adept Technology founded.
1984: off-line programming environments with graphical interfaces:simulation of the task execution and then download of the code tothe workcell
1984: Joseph Engelberger founds Transition Robotics, nowHelpmates, for development of “service robots”
1989: Firm Computer Motion founded
1989 Firm Barrett Technology founded
1993: Firm Sensable Technologies founded
1993: DLR experiment ROTEX on the Space Shuttle
1994: CMU Robotics Institute’s developes Dante II, a 6-leggedrobot for vulcanos exploration
1995: Firm Intuitive Surgical founded
1997: NASA “Mars PathFinder” mission with the robot Sojourner
1997: Honda P3, 8-th prototypes of humanoid robot ( secretproject started in 1986)
2000 Honda and Asimo
2000: Sony humanoid robots, the Sony Dream Robots (SDR)
2001: Sony second Aibo generation.
C. Melchiorri (DEI) Industrial Robotics 15 / 16
A short robotics history
A short robotics history
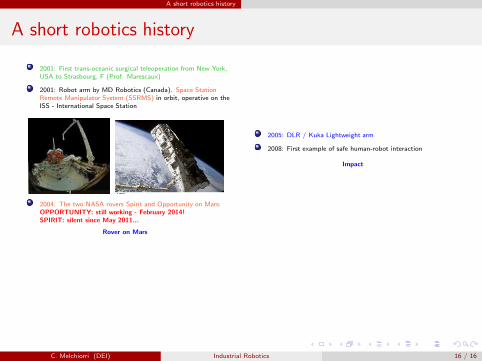
2001: First trans-oceanic surgical teleoperation from New York,USA to Strasbourg, F (Prof. Marescaux)
2001: Robot arm by MD Robotics (Canada). Space StationRemote Manipulator System (SSRMS) in orbit, operative on theISS - International Space Station
2004: The two NASA rovers Spirit and Opportunity on Mars:OPPORTUNITY: still working - February 2014!SPIRIT: silent since May 2011...
Rover on Mars
2005: DLR / Kuka Lightweight arm
2008: First example of safe human-robot interaction
Impact
C. Melchiorri (DEI) Industrial Robotics 16 / 16