igcc power plant dispatch using infinite-horizon...
TRANSCRIPT

IGCC Power Plant Dispatch Using Infinite-Horizon Economic
Model Predictive Control
Journal: Industrial & Engineering Chemistry Research
Manuscript ID: ie-2012-008665.R2
Manuscript Type: Article
Date Submitted by the Author: n/a
Complete List of Authors: Omell, Benjamin; Illinois Insitute of Technology, Department of Chemical and Biological Engineering Chmielewski, Donald; Illinois Institute of Technology, Department of Chemical and Biological Engineering
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research

1
IGCC Power Plant Dispatch
Using Infinite-Horizon Economic Model Predictive Control
Benjamin P. Omell and Donald J. Chmielewski
1
Department of Chemical and Biological Engineering, Illinois Institute of Technology, Chicago, IL 60616
The Integrated Gasification Combined Cycle (IGCC) possesses a number of
benefits over traditional power generation plants, ranging from increased efficiency
to flex-fuel and carbon capture opportunities. A lesser known benefit of the IGCC
configuration is the ability to load track electricity market demands. The idea being
that process modifications to enable dispatch capabilities will allow for a time-shift
of power production away from periods of low energy value to periods of high value.
The work begins with an illustration of Economic Model Predictive Control (EMPC)
as a vehicle to exploit dispatch capabilities by pursuing directly the objective of
maximizing revenue. However, implementation of EMPC can result in unexpected
and at times pathological closed-loop behavior, including inventory creep and bang-
bang actuation. To address these issues, an infinite-horizon version of EMPC is
developed and shown avoid many of the performance issues observed in the finite-
horizon version. The paper concludes with an in depth discussion of energy value
forecasting and how the quality of forecasts can be incorporated into the design of the
infinite-horizon EMPC controller.
I. INTRODUCTION
Power plants based on the Integrated Gasification Combined Cycle (IGCC) possess a number
of benefits over traditional power generation, including increased efficiency and flex-fuel and
carbon capture opportunities. In short, a conventional IGCC power plant operates as in Figure 1,
but without the storage units or MeOH plant. The gasification block converts coal and oxygen
into synthesis gas, which is subsequently cleaned and de-carbonized to output a stream of nearly
pure hydrogen. This hydrogen is then converted to electric power by a combined cycle power
block. A portion of generated power must be used to drive compressors for air separation and
CO2 sequestration operations.
1 Corresponding author: phone: 312-567-3537; fax: 312-567-8874; e-mail: [email protected]
Page 1 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

2
Another possible benefit of IGCC is smart grid coordination through power output dispatch.
Specifically, it is postulated that an IGCC plant can change power output to track grid demand
and thus exploit electricity market price fluctuations. The ability to change power output from an
IGCC plant can be achieved by a variety of hardware configurations (see Figure 1). The
configuration most commonly cited is poly-generation. In this case, a portion of the hydrogen
from the acid gas removal unit is diverted elsewhere during periods of low energy value. This
diverted hydrogen could be sold directly or chemically converted to a liquid fuel (possibly
MeOH) for transportation applications, [Robinson and Luyben, 2011]. Another possibility is to
store the hydrogen during periods of low energy value, and then draw from the inventory during
peak demand periods. A similar scenario with respect to the Air Separation Unit (ASU) is also
possible. In this case, a compressed air storage unit is placed between the air compressor and the
cryogenic distillation units. Such a configuration would allow for a constant flow of compressed
air to the cryogenic distillation, while allowing the power to the air compressors to be anti-
correlated with energy value, which would add power to net output during periods of high value.
Similarly, significant power is consumed to compress CO2 to sequestration pressure. Thus, part
of the captured CO2 can be stored at an intermediate pressure during periods of high energy
value and eventually pressurized during low value periods. It is also noted that an unmodified
plant has dispatch capabilities, in the sense that the gasification block can be asked to change
hydrogen production rates. However, the ramp rate of the gasification block is expected to be
quite slow, owing mostly the slow response time of the cryogenic distillation portion of the ASU,
[Jones et al., 2011].
A fundamental question associated with smart grid coordination is the development of a
control structure capable of accepting information from the smart grid. The first issue concerns
set-point tracking abilities. Specifically, one must design regulatory level loops to achieve
desired set-point ranges and ramp rate capabilities. A number of efforts have explored this issue
for a variety of IGCC configurations as well as specific unit operations [Mahapatra and Bequette,
2010; Bequette and Mahapatra, 2010; Jones et al., 2011; Robinson and Luyben, 2011]. While
controller design at the regulatory level is clearly an important activity, such efforts typically
lack sufficient motivation. That is, the performance objectives of desired set-point ranges and
achievable ramp rates are set somewhat arbitrarily. To arrive at sufficient motivation for these
objectives, one must consider the supervisory controller, which will ask the regulatory
Page 2 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

3
controllers to implement its set-point commands. Two scenarios are possible. The first is a
situation in which the regulatory loops are overdesigned. That is, the controllers are capable of
achieving performance greater than the supervisory controller would ever request. In this case,
there is likely over-expenditure regarding control system hardware. The second scenario is a
situation in which the regulatory loops are incapable of achieving the performance desired by the
supervisor. In this case, the regulatory loops could be redesigned (by adding more effective
hardware) or the performance limitations of the regulatory loops could be communicated to the
supervisor, so that it knows the level of performance that is possible and can plan accordingly.
One way to define a supervisory controller is to assume a merchant style of operation.
Specifically, set the goal to be maximization of average revenue, defined as the integral of the
product of energy value and net power produced. In this case, the energy value signal would be
an input to the controller. However, unlike a disturbance, the objective is not to kill its impact on
the output. Similarly, unlike a set-point command, the objective is not to force the output to track
energy value (however, as we will see in subsequent sections, the set-point analogy is very close
to the resulting objective). One way to approach this problem is through the use of Economic
Model Predictive Control (EMPC), [Rawlings and Amrit, 2009]. In this case, the quadratic
objective function typically used in MPC, [Rawlings, 2000], is replaced by an expression directly
reflecting revenue. Similar approaches have worked well in the area of Heating Ventilation and
Air Conditioning (HVAC) control, [Braun, 1992; Morris et al., 1994; Kintner-Meyer and Emery,
1995; Henze et al., 2003; Braun, 2007; Mendoza-Serrano and Chmielewski, 2012a], as well as in
the area of process operations scheduling [Karwana and Keblisb, 2007; Baumrucker and Biegler,
2010; Lima et al., 2011, Kostina et al., 2011]. In both of these applications computational issues,
resulting from the large size of the on-line optimization problem, have been reported. Efforts to
reduce this computational burden, by reducing prediction horizon, have resulted in undesirable
closed-loop characteristics, including inventory creep, [Lima et al., 2011] and bang-bang type
actuation [Mendoza-Serrano and Chmielewski, 2012a]. It is also noted that efforts to ensure
closed-loop stability of the EMPC algorithm have required the use of specialized analysis
techniques and non-intuitive additions to the basic algorithm [Diehl, et al., 2011; Huang and
Biegler, 2011; Heidarinejad, et al., 2012].
The next section outlines the EMPC approach and illustrates, through a simplified IGCC
example, its ability to maximize revenue. In addition, the closed-loop eccentricities of the EMPC
Page 3 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

4
are illustrated. Section 3 introduces a new class of linear controllers. This new class, denoted
Economic Linear Optimal Control (ELOC), is shown to possess a policy similar to EMPC, but
only capable of enforcing equipment constraints from a statistical perspective. In Section 4, the
infinite-horizon EMPC controller is developed using ELOC as a basis. Section 5 discusses the
important issue of forecasting energy value and the development of a measurement based
formulation of the infinite-horizon EMPC policy.
II. ECONOMIC MPC
Consider a process model: ),,( pmsfs =& , ),,( pmshq = where s is the state vector, m is the
vector of manipulated variables, p is the disturbance vector and q contains the performance
outputs. In addition, assume the following restrictions on the performance outputs:
maxmin qqq ≤≤ . To implement a predictive type controller, first the continuous-time model must
be converted to discrete-time form and second, the notion of a predictive time index must be
introduced. The resulting model is:
))|(ˆ),|(),|(()|1( ikpikmiksfiks d=+
(1)
))|(ˆ),|(),|(()|( ikpikmikshikq d=
(2)
maxmin )|( qikqq ≤≤
(3)
)(ˆ)|( isiis =
(4)
where the index i represents the actual time of the process and the index k is predictive time. The
idea being that at a time i the controller will be given an estimate of the initial condition, )(ˆ is ,
along with forecasts of the process disturbances, )|(ˆ ikp . Then, the controller must select a
sequence of control inputs )|( ikm , k = i…i+N-1, such that the inequalities of (3) are satisfied.
As there may be many sequences satisfying (3), an additional performance measure is applied
via the following optimization problem:
Page 4 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

5
)(ˆ)|(
)|(
))|(ˆ),|(),|(()|(
))|(ˆ),|(),|(()|1(..
))|(ˆ),|(),|((
))|(ˆ),|(),|((min
maxmin
1
)|(),|(
isiis
qikqq
ikpikmikshikq
ikpikmiksfiksts
iNipiNimiNisg
ikpikmiksg
d
d
N
Ni
ikikmiks
≤
≤≤
=
=+
++++
∑−+
=
(5)
If the solution to (5) is )|(* ikm , k = i…i+N-1, then the input given to the process
))(),(),(()1( ipimisfis d=+ is )|()( * iimim = . Then, at the next time step, i+1, new )1(ˆ +is and
)1|(ˆ +ikp estimates are calculated (based on new measurements) and given back to (5) to
calculate )1|1()1( * ++=+ iimim .
In the traditional implementation of MPC, g(.) and gN(.) are selected to be a quadratic
functions with minimum values occurring at the target operating condition, where the target
operating condition is selected prior to the MPC implementation. These smooth convex functions
provide computational advantages as well as a good starting point for stability analysis. In the
case of EMPC, g(.) is selected to represent operating cost of the process. In many cases, the
appropriate function is a simple linear relation. Since a linear function has no minimum,
selection of the constraints, maxmin )|( qikqq ≤≤ , is critical to the definition of a meaningful
controller.
Example 1: The operating conditions of Case 2 of the NETL Baseline Report, [NETL, 2007],
form the basis of all examples. Specifically, the following conditions were assumed for the no
dispatch design: PNnom = 544MW, PG
nom = 642MW, PACnom = 67MW, PCC
nom = 31MW, νH2nom =
νGnom = 90 tonne H2/hr, νC
nom = 790 tonne compressed air/hr and νCO2 nom = 457 tonne CO2/hr.
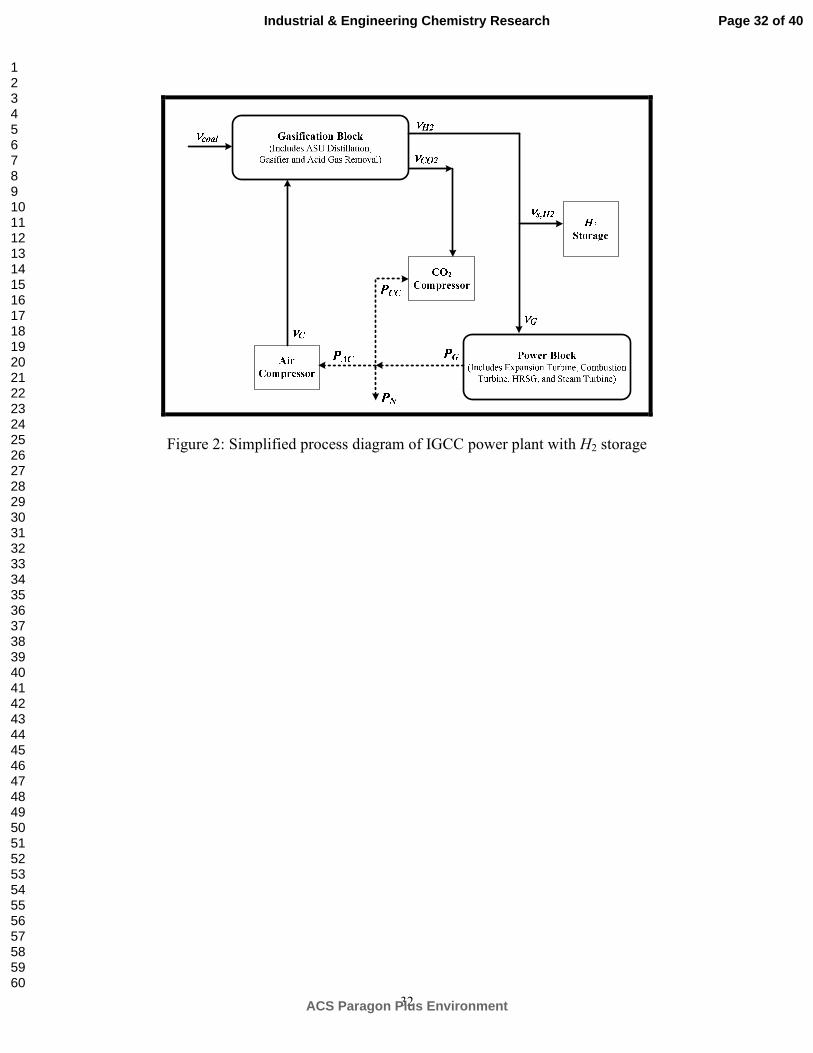
For the current example, assume only two upgrades are performed (see Figure 2). The first is to
add a hydrogen storage unit, capable of holding 700 tonne of H2. The second is to double the size
of the power block, so that its maximum output is 1284MW. Furthermore, assume that only these
two units are capable of dynamic operation and all other units remain at the nominal operating
conditions.
Page 5 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
6
Remark: It should be pointed out that the equipment upgrades of this example are selected
arbitrarily and intended only to illustrate the EMPC procedure. However, it is expected that
changes to the assumed equipment upgrade sizes will impact the revenue increase expected from
EMPC operation. Specifically, larger upgrades are expected to yield larger revenue increases. It
is additionally recognized that a proper economic assessment of the IGCC dispatch opportunity
will require a net present value calculation that weighs revenue gain against the capital cost of
equipment upgrades. While the preliminary results of [Yang et al., 2012] propose such a
procedure, many of the engineering challenges (associated with H2 storage facilities and
equipment degradation resulting from cycling of the power block) have yet to be addressed. In
sum, the current effort has the limited scope of assessing revenue gains under the assumption of
pre-specified and technologically viable equipment upgrades. As a final point, the assumption of
lower bounds at zero for both storage capacity and power block throughput is simply to enhance
presentation clarity. Specification of non-zero lower bounds is not expected to change the
qualitative aspects of subsequent results.
The top plot of Figure 3 indicates the energy values used for this example (this historic data
corresponds to the PJM Western Hub, Day-Ahead prices for the period of June 1, 2001 through
June 10, 2001, [PJM, 2012]). In the envisioned EMPC implementation, forecasts of energy value
will be provided to the controller. In addition to forecast errors, these forecasts are likely to be
updated at each time step. However, to avoid the details of forecasting and the closed-loop
impacts of forecast error and updates, this example will assume the forecasts to be perfect, in that
they are error free and do not change with time. While this assumption is not critical (and will be
removed in Section 4), it allows us focus on the fundamental issues and not wonder if observed
behavior is due to a forecasting artifact. (As such, in this example, the ‘hat’ notation will be
dropped.)
The mass of hydrogen in the storage tank is simply the time integral of νs,H2. Then,
enforcement of the material balance νs,H2 = νH2 - νG yields the following dynamic model:
122 / βν GHH PM −=& (6)
where =1β 7.1 MWhr / tonne of H2. The discrete-time predictive version of the model is:
Page 6 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

7
1...
)|(0
)|(0
)|()|()|1(
max
max
22
22
−+=
≤≤
≤≤
+−=+
Niik
PikP
MikM
cikbPikMikM
GG
HH
GHH
(7)
If the sample time is ∆ts = 1 hr then b = ∆ts/β1 = 0.141 tonne H2/MW and c = ∆tsνH2 = 90 tonne
H2, MH2max = 700 tonne H2 and PG
max = 1284 MW. It is noted that selecting a value of zero for
PG will result in negative values for PN. However, this should not be an issue, as this power
should be available from the grid, and most likely at a low price.
If )(iCe denotes energy value during period i, then revenue during period i is sNe tiPiC ∆)()(
sCCACesGe tPPiCtiPiC ∆+−∆= ))(()()( . Since the second term cannot be influenced by the
manipulated variable, )(iPG , an appropriate formulation of the EMPC on-line optimization is
)()|(
1...
)|(0
)|(0
)|()|()|1(..
)|()|(max
22
max
max
22
22
1
)|(),|(2
iMiiM
Niik
PikP
MikM
cikbPikMikMts
ikPikCN
t
HH
GG
HH
GHH
Ni
ik
Ges
ikPikM GH
=
−+=
≤≤
≤≤
+−=+
∆
∑−+
=
(8)
where the constant Nts /∆ may be dropped, but is retained so that the units of the objective
function will be equal to those of average revenue. Clearly, problem (8) can be solved using a
standard LP solver.
Figure 3 illustrates the closed-loop response of the EMPC policy using a 24 hour prediction
horizon (N = 24). In this case, the response of the manipulated variable, PG, is as one would
desire; at its maximum when energy value is high and at its minimum when energy value is low.
The periods in which PG is at the nominal value (PGnom = 642MW = β1νH2) correspond to
intervals in which the hydrogen storage is full and energy value is low or the storage is empty
and energy value is high. This behavior, however, makes good sense as the controller has no
Page 7 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

8
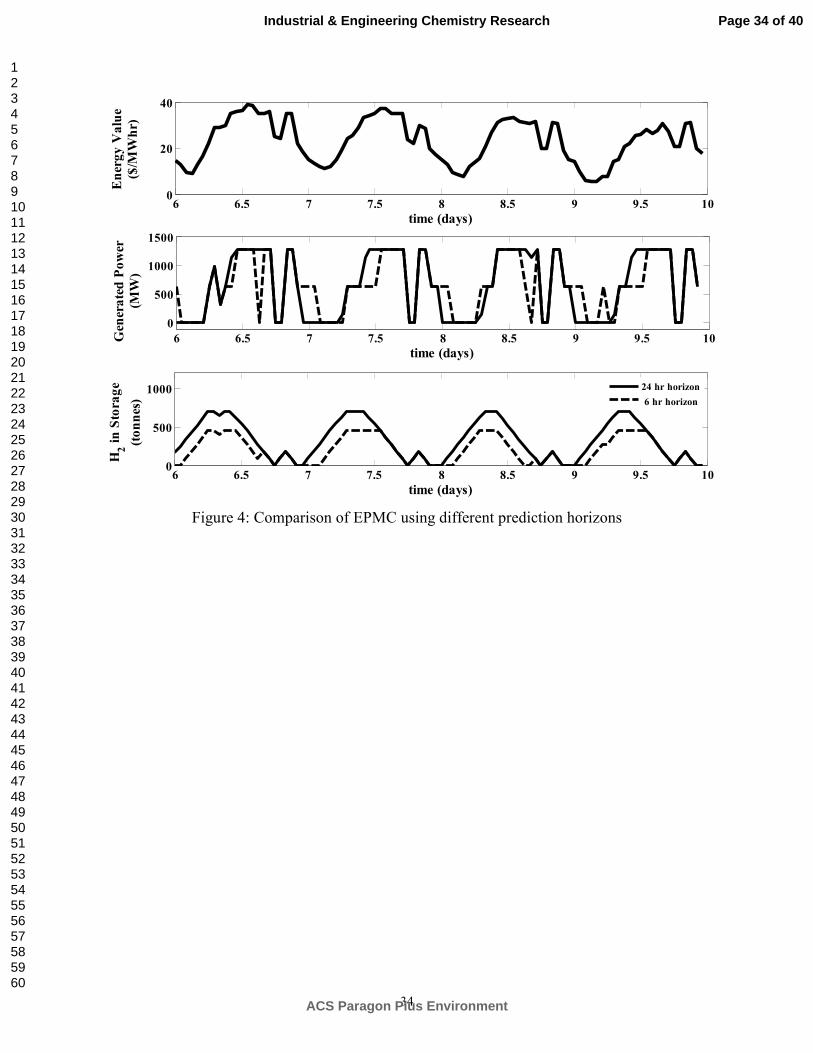
other reasonable option under these conditions. In the 6 hour horizon case (of Figure 4), the
EMPC policy seems to lose this good sense. That is, the controller tends to set PG equal to the
nominal value more frequently than needed. Specifically, during periods in which energy value
is low and the storage is not yet full. Why would the controller perform this way? The answer
obviously stems from the abbreviated horizon. As stated in [Lima et al., 2011], the controller is
‘myopic’, in the sense that it cannot see beyond its short horizon. And as such, the controller
decides to use up the hydrogen it has in inventory in an effort to maximize short-term revenue.
However, as illustrated by the 24 hour horizon case, if it had known that the value of converting
hydrogen to electric energy would soon increase, then it would have continued to stockpile
hydrogen rather than use it. One approach to mitigating the inventory creep phenomena is to add
a constraint to the final step of the horizon. Specifically, require the predicted inventory at the
final step to be greater than some fixed value, [Lima et al., 2011]. While this method can reduce
the impact of inventory creep, it will also require an ad’hoc selection of the lower bound
parameters.
It is also noted that in both the 24 and 6 hour horizon cases, there are intervals in which PG
jumps from one extreme to the other and then back to the original extreme. This sort of
chattering (or bang-bang type actuation) seems to occur when the inventory is at an extreme and
the energy value is near its average or when the energy value curve experiences sharp changes
(for example at the second, small, daily peak occurring in the early evening). To reduce the
occurrence of this chatter one could add constraints to the first or second time derivative of PG.
In [Baumrucker and Biegler, 2010], the square of the first derivative of the manipulated variable
is added to the objective function. However, both of these derivative based methods seem to be
poorly motivated by the physical situation and will likely compromise optimality of the closed-
loop response. Another approach is to force power output to be in one of three states; 0, PGnom or
PGmax. Then, one could add constraints prohibiting two state changes within a certain period (say
3 or 4 hours). In addition to requiring the use of mixed-integer programming to solve the on-line
EMPC optimization problem, selection of an appropriate waiting period is somewhat arbitrary.
Another approach, and the one advocated in this paper, is to extend the horizon size of the
EMPC to infinity. Extending the constrained EMPC problem to an infinite horizon problem
would, however, result in an infinite number of variables in the numeric optimization and render
the problem intractable. A common approach to similar constrained infinite-time optimal control
Page 8 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

9
problems is to enforce only a finite number of constraints, [Chmielewski and Manousiouthakis,
1996; Manousiouthakis and Chmielewski, 2002]. In this case, the unconstrained infinite-horizon
tail is solved analytically and its value function is appended to the constrained finite-time
problem as a final cost term, representing the cost-to-go from the final time to infinity. However,
if the EMPC objective function for the IGCC problem is applied to an unconstrained problem,
the problem will become unbounded and no solution will exist. Thus, our approach will be to
modify the unconstrained infinite-horizon tail problem to be statistically constrained in an effort
to obtain an analytical solution and approximate the cost-to-go from the final time to infinity.
III. ECONOMIC LINEAR OPTIMAL CONTROL
We now explore the question of developing a linear controller capable of mimicking the EMPC
policy. To motivate the discussion, the scenario of Example 1 will be assumed. However,
generalization of the approach is straightforward; see [Yang et al., 2012]. The resulting
Economic Linear Optimal Control (ELOC) policy will form the basis of the infinite-horizon
EMPC policy to be developed in Section 4.
We begin by revisiting the EMPC objective function and consider the impact of taking the
limit with respect to N.
[ ] sGe
Ni
ik
Ges
NtPCEikPikC
N
t∆=
∆
∑−+
=∞→
1
)|()|(lim (9)
The result is that the objective function will become the long term average revenue. The question
then becomes, can one calculate this long term average and can one select a policy for PG such
that this average is maximized? One approach is to assume PG has the following form:
=GP~
eC~
α (10)
where GGG PPP −=~
, eee CCC −=~
, GP = E[ GP ] and eC = E[ eC ]. Equation (10) reflects the
general notion that when energy value is high, power production should be large and production
should be small when value is low. The parameter α, yet to be specified, will indicate the
Page 9 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

10
magnitude of this relationship. The consequence of (10) is that (9) can be evaluated as:
GeCeGeGeGGeeGe PCPCPCEPPCCEPCE +Σ=+=++= α]~~
[)]~
)(~
[(][ (11)
where ]~
[2
eCe CE=Σ is the variance of the energy value signal. Thus, if given a characterization
of Ce, then one could simply optimize over α and GP . (However, for the case being considered,
inspection of (6) indicates that GP must be equal to νH2/β1 regardless of the control policy
selected.)
A stochastic characterization of Ce begins by recalling the historic energy value data depicted
in Figure 3. The data clearly possesses an oscillatory characteristic with a period of 1 day. As
such, one could model Ce as the output of an under-damped 2nd order system driven by white
noise (think of a mass-spring-damper system with a harmonic frequency of 1 day-1). However,
experience indicates that such a model will allow too much of the low frequency energy
contained in the white noise to be passed through to Ce. To remove these low frequency
components, the white noise is first sent through a high pass filter. The net result is the following
3rd order shaping filter:
ee
h
ccc
CC
w
w
+=
−=
−−−=
=
αφ
τφαφ
φχωφωφαωφ
φφ
/
/)(
2)(
1
313
21
2
31
2
2
21
&
&
&
(12)
where cc τπω /2= , 24=cτ hr, 1.0=χ , 1=hτ hr and w1 is a Gaussian, zero-mean white noise
process with the following spectral density:
eC
hc
hchc
c
wS Σ
++
=
22
22 1241 τω
τχωτωω
χ (13)
The idea behind this shaping filter model is that for all parameter values ( cτ , χ , hτ , eC and α ),
Page 10 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

11
a stochastic covariance analysis on (12) will indicate that the calculated variance of eC is equal to
the CeΣ parameter value selected in (13). As such, it is highlighted that the cτ , χ , hτ values
selected above are not special, but simply represent parameter values such that realizations of Ce
match, purely on a visual basis, with the data of Figure 3. While this is sufficient for our purpose
of illustrating the method, a more rigorous system identification approach is likely warranted,
which may include changing the model structure from that given in (12). The top plot of Figure 5
is a realization of eC generated from (12) using the above parameters as well as; α = 1 MW2hr/$,
eC = 20 $/MWhr and CeΣ = (12 $/MWhr)2.
An important aspect of the definition of Ce is the fact that φ1 is equal to eC~
α . Thus, to
enforce an approximation of condition (10), one could require
( )[ ] εφ <−2
1
~GPE (14)
where ε is selected to be sufficiently small, but not so small that numeric feasibility becomes an
issue. However, since PG is the manipulated variable, satisfaction of this inequality should be
achievable for rather small values of ε (ε is set to 0.01 MW2 for all cases).
The next step is to recast the compound system into deviation variable form:
T
HH MMx ][ 32122 φφφ−=
][ GG PPu −= ][ 1ww = (15)
T
GGGGHH PPPPMMz ])([ 122 φ−−−−=
where 2HM is arbitrarily defined as 2/max
2HM . Then, the process (augmented with the shaping
filter) can be written as
maxmin zzz
uDxDz
GwBuAxx
ux
≤≤
+=
++= α&
(16)
Page 11 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

12
where
−
−−−=
h
ccc
A
τωχωω/1000
20
0100
0000
22
−
=
0
0
0
/1 1β
B
=
h
c
G
τω/1
0
0
2 [ ]1ww SS = (17)
−
=
0010
0000
0001
xD
=
1
1
0
uD
−
−
−
=
εG
H
P
M
z
2
min
−
−
=
εGG
HH
PP
MM
z max
2
max
2
max
(18)
The continuous-time model can then be converted to a discrete-time form using the sample and
hold method ( stA
d eA∆= , ∫
∆
=st
At
d BdteB0
, ∫∆
=st
At
d GdteG0
and sww tS ∆=Σ / ), [Burl, 1999]:
maxmin )(
)()()(
)()()()1(
zizz
iuDixDiz
iwGiuBixAix
ux
ddd
≤≤
+=
++=+ α
(19)
The ELOC controller is then assumed to be a simple linear feedback of the state: )()( iLxiu = .
Given a candidate controller, L, the variance of the jth performance variable, ζj , is calculated as
ζj = ρjΣzρjT (20)
T
xxxuxz LDDLDD )()( +Σ+=Σ (21)
T
dwd
T
ddxddx GGLBALBA Σ++Σ+=Σ 2)()( α (22)
where ρj is the jth row of an identity matrix and Σx is the positive definite solution of (22). Rather
than enforce point-wise-in-time constraints,maxmin )( jjj zizz ≤≤ , the central aspect of the ELOC
method is to follow a pseudo- (or chance-) constrained approach by enforcing the following
statistical constraints:
( )2max
jj z<ζ and ( )2min
jj z−<ζ (23)
Page 12 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

13
The next step is to find a linear feedback, L, to maximize our expression for average revenue,
(11). The following nonlinear optimization is posed to determine such a feedback.
{ }GeCeL
PC
j
x
+Σ≥Σ
ααζ ,
,0,max (24)
3...1},,min{
)()(
)()(
..
minmax
2
2
=−=
<+Σ+=
Σ++Σ+=Σ
jzzz
zLDDLDD
GGLBALBA
ts
jjj
j
T
j
T
xxxuxjj
T
dwd
T
ddxddx
ρρζ
α
To arrive at a convex formulation of (24), the following Theorem (a slight generalization of
Theorem 6.1 from [Chmielewski and Manthanwar, 2004]) is applied.
Theorem 1: There exists stabilizing L, Σx 0≥ and ζj 0≥ , j = 1 … nz such that
Σx = (Ad+BdL)Σx(Ad+BdL)T + α2GdΣwGd
T, (25)
ζj =ρj(Dx+DuL)Σx(Dx+DuL)TρjT , j = 1 … nz (26)
and ζj < 2
jz , j=1 … nz (27)
if and only if there exists X 0> , Y and jµ > 0, j=1 … nz such that
( )( ) 0
0
01
>
Σ
+
+
−w
T
d
T
dd
ddd
G
XYBXA
GYBXAX
α
α (28)
( )
( )0>
+
+
XYDXD
YDXD
T
j
T
ux
uxjj
ρ
ρµ
, j=1 … nz (29)
and jµ < 2
jz , j = 1 … nz (30)
Page 13 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

14
Application of Theorem 1 to (24), results in the following convex optimization.
{ }GeCeXY
PC
j
+Σ≥
ααµ ,
,0,max (31)
( )( )
( )
( )
3...1},,min{
0
0
0
0
..
minmax
2
1
=−=
<
>
+
+
>
Σ
+
+
−
jzzz
z
XYDXD
YDXD
G
XYBXA
GYBXAX
ts
jjj
jj
T
j
T
ux
uxjj
w
T
d
T
dd
ddd
µ
ρ
ρµ
α
α
Due to the linearity of the objective function and convexity of the constraints any local optimum
of problem (31) is guaranteed to be a global optimum. It is additionally noted that if the solution
to (31) is X* and Y*, then L* = Y*(X*)-1 is the solution to (24), within the accuracy of the strict
inequality constraints of (31). To arrive at the ELOC policy, the solution L* must be scaled with
respect to α*. That is, the columns of L* corresponding to the shaping filter states (the 2nd through
4th states) must be multiplied by α*. This rescaling will make the policy appropriate for a price of
electricity generated by (12) with α set equal to 1.
Example 2a: Reconsider the scenario of Example 1, and assume the shaping filter used to model
Ce has parameter values as indicated in this section. Problem (31) is solved using the Linear
Matrix Inequality (LMI) optimization routines found in the Robust Control Toolbox of Matlab.
The solution to problem (31) is found to be α* = 774 MW2hr/$ and
[ ]0009.0017.0018.0067.0* −−=L (32)
After rescaling with respect to α*, the ELOC feedback gain is determined to be:
Page 14 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

15
[ ]69.09.122.14067.0 −−=ELOCL (33)
The second two plots of Figure 5 compare the resulting ELOC policy with the EMPC policy
using the energy value data of the first plot of Figure 5. As expected the ELOC policy does not
enforce constraints point-wise-in-time, but does enforce them statistically. The important point,
however, is that the ELOC trajectory has a general shape that is remarkably similar to the EMPC
trajectory.
It should be pointed out that a trajectory with less point-wise-in-time constraint violations
could be achieved by tightening the statistical constraints of the ELOC. (For example, in (31),
�� � ��̅� could be replaced with�� � ���̅ 2⁄ �
�.) This however would still not guarantee that
point-wise-in-time constraints would not be violated, only that they would be violated less
frequently. Furthermore, if the statistical constraints are tightened too much, then the trajectory
would be significantly altered from that of the EMPC. The next section will illustrate a novel
approach to enforce point-wise-in-time constraints while preserving the positive features of the
ELOC.
IV. INFINITE-HORIZON ECONOMIC MPC
We now turn to the question of converting the ELOC policy into one that is capable of enforcing
constraints point-wise-in-time. To do so, we revisit the quadratic version of MPC and highlight
the following important property. Consider an unconstrained finite-horizon MPC controller:
)()|(
1...),|()|()|1(..
))|()|()|(
)|(
)|(
)|(min
1
)|(),|(
ixiix
NiikikuBikxAikxts
iNiPxiNixiku
ikx
RM
MQ
iku
ikx
dd
TNi
ikT
T
ikuikx
≤
−+=+=+
+++
∑
−+
=
(34)
Then, the property is stated as follows: If P is selected such that
T
d
T
dd
T
dd
T
dd
T
d PBAMPBBRPBAMQPAAP )())(( 1 +++−+= − (35)
Page 15 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

16
then the MPC controller of (34) will be independent of horizon size, N, and will be identical to
using the following linear feedback gain
T
d
T
dd
T
d PBAMPBBRL )()( 1 ++−= − (36)
An equivalent statement would be: )()|(* iLxiiu = .
The first important point is the independence of the policy with respect to horizon size, which
is made possible by the appropriate selection of P. In essence, selecting P based on (35) makes
all unconstrained finite-horizon MPC policies equal to the infinite-horizon policy, which is the
classic linear quadratic regulator feedback given in (36).
The second important point is that for some linear feedbacks there exists an equivalent
unconstrained MPC controller. Thus, if such a property holds for the feedback generated by (31),
then the addition of constraints to its MPC counterpart will generate a policy similar to the
original linear feedback. In [Chmielewski and Manthanwar, 2004], it is shown that a class of
problems (to which (31) is a member) is guaranteed to possess an equivalent unconstrained MPC
controller. Furthermore, [Chmielewski and Manthanwar, 2004] provides the following Theorem
on inverse optimality, which can be used to synthesize weighting matrices Q, R, M and P (from
L, Ad and Bd) such that the resulting unconstrained MPC is equivalent to the original policy
)()( iLxiu = . Theorem 6.2 of [Chmielewski and Manthanwar, 2004] is restated here for
convenience.
Theorem 2: If there exists P > 0 and R > 0 such that
( ) ( )( ) 0>
++
++++−
RPABLPBBR
PBAPBBRLLPBBRLPAAP
d
T
dd
T
d
d
T
dd
T
d
T
d
T
d
T
d
T
d (37)
then ( )LPBBRLPAAPQ d
T
d
T
d
T
d ++−=̂ and ( ) d
T
dd
T
d
T PBAPBBRLM ++=̂ will be such that
Page 16 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

17
0>
RM
MQT
and P and L satisfy (35) and (36).
In summary, construction of the infinite-horizon EMPC is as follows. Begin by solving
problem (31) to determine ELOCL . Then, implement the procedure suggested by Theorem 2 to
synthesize weighting matrices Q, R, M and P that are companion to ELOCL . Finally, implement
the following constrained MPC policy using a standard QP solver.
)(ˆ)|(
1...,)|(
1...),|()|()|(
1...),|(ˆ)|()|()|1(..
))|()|()|(
)|(
)|(
)|(min
maxmin
1
)|(),|(
ixiix
Niikzikzz
NiikikuDikxDikz
NiikikwGikuBikxAikxts
iNiPxiNixiku
ikx
RM
MQ
iku
ikx
ux
ddd
TNi
ikT
T
ikuikx
≤
−+=≤≤
−+=+=
−+=++=+
+++
∑
−+
=
(38)
Example 2b: Continuing Example 2a, the linear feedback (33) generates the weighting matrices:
−−
−××−
×−×−
−−
=
16843130034200162
313001083.51037.63021
342001037.61096.63304
162302133047.15
55
55
Q [ ]3482=R (39)
−
−
=
2418
45000
49300
234
M 3
2
10
6660224192.0
22487605405.12
195404982.2
2.05.122.21026.7
−
−
×
−−
−
−
×
=P (40)
It is noted that the weighting matrices Q, R, M and P are not unique, in that identical
implementations of Theorem 2 on different computers or different versions of Matlab will likely
result in different weights. The important aspect, however, is to verify that a substitution of the
Page 17 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

18
weights back into (35) and (36) re-generates the policy ELOCL .
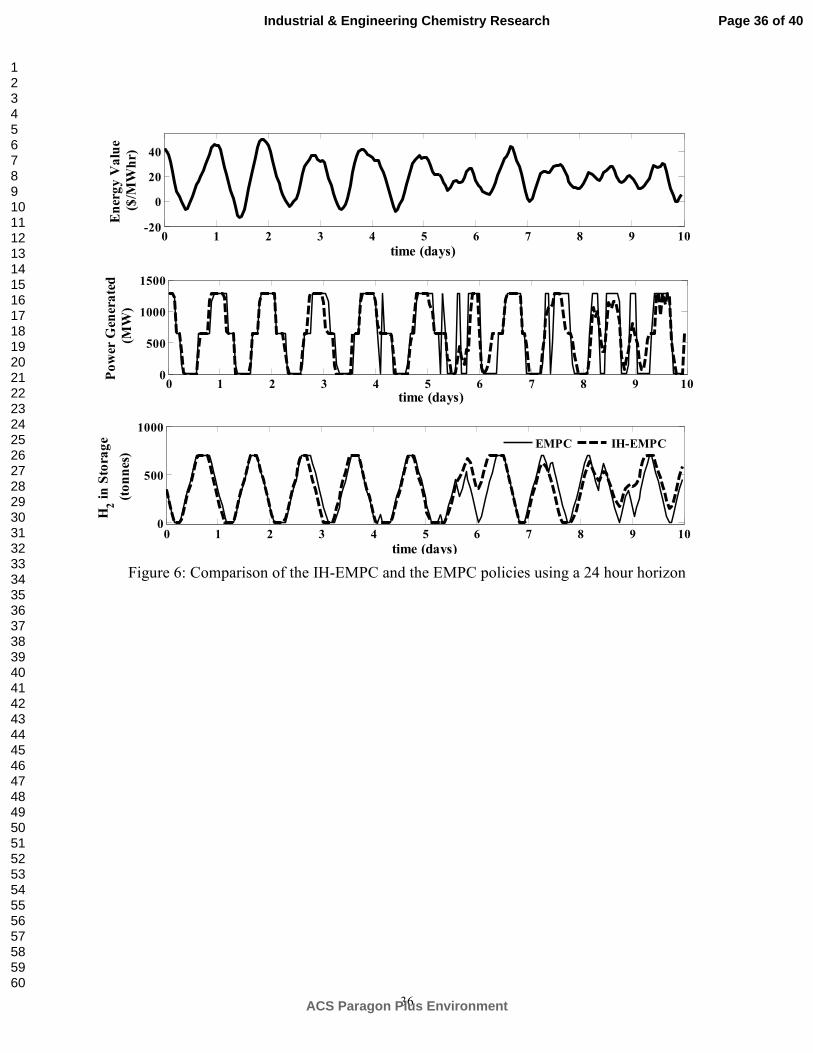
Using a 24 hour horizon and the energy values depicted in the top plot of Figure 6 (the same
as in Figure 5), the EMPC policy is compared to the infinite-horizon EMPC (IH-EMPC).
Clearly, there is a strong resemblance between the two policies. More remarkable is the fact that
the chatter observed in the EMPC seems be damped out almost completely. That is, the IH-
EMPC policy shows a tendency toward the chatter actions but is slowed by the move
suppression aspects of the quadratic objective. The plots of Figure 7 illustrate the policy’s
insensitivity with respect to horizon size. The fact that even with a horizon of one hour (one
time-step of prediction) the trajectory is virtually unchanged indicates the strong influence of the
final cost term: ))|()|( iNiPxiNix T ++ .
V. PARTIAL STATE INFORMATION IH-EMPC
While the plots of Figures 6 and 7 are impressive, the scenario of Example 2 provides the IH-
EMPC policy with two unrealistic advantages; perfect forecasting and the energy value data was
generated by the shaping filter model contained within the IH-EMPC policy. The assumption of
perfect forecast boils down to assuming perfect knowledge of the white noise sequence w(k) for
k > i, where i is the current time. In terms of problem (38), that is )()|(ˆ kwikw = for all i. In the
imperfect forecasting case, the procedure is as follows. Using a shaping filter model, such as the
one in Equation (12) with α =1, apply a state estimator to determine )(ˆ ix . Then, implement a
state predictor (essentially a simulation of (12) with )(ˆ)|( ixiix = and 0)|(ˆ =ikw ) to generate
forecasts )|( ikx . Application of this procedure to the historic data of Example 1 (top plot of
Figure 3) resulted in the plots of Figure 8. Clearly, both policies fail. The problem seems to be an
over-compensation for the short-term average of energy value. That is, the controllers hoard H2
in the first half of the simulation (t < 10 days), due to the fact that eC is less than eC (= 20
$/MWhr), and deplete H2 inventory in the second half, when eC is mostly greater than eC .
One way to address this issue is to restructure the shaping filter to capture the changes in the
short-term average. For example, the filter of (12) could be augmented with a low pass filter
driven by an independent white noise process. In this case (12) would be replaced with
Page 18 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

19
ee
l
h
ccc
CC
w
w
w
++=
−=
−=
−−−=
=
2411
4224
3113
21
2
311
2
2
21
//
/)(
/)(
2)(
αφαφ
τφαφ
τφαφ
φχωφωφαωφ
φφ
&
&
&
&
(41)
where 6=lτ hr and w2 is a Gaussian, zero-mean white noise process that is independent of w1
and the spectral densities of the two are defined as follows, with γ = 0.85:
eC
hc
hchc
c
wS Σ
++
=
22
22
1
124
τωτχωτω
ωχ
γ (42)
eClwS Σ−= τγ 2)1(2 (43)
One could then define z3 as 41
~φφ −−GP and let the optimization select α1 and α2 such that the
resulting policy will give appropriate weight to each state of the shaping filter (see [Mendoza-
Serrano and Chmielewski, 2012b] for details on the implementation of this procedure). The
result of the optimization is as one would expect, in that α2* is found to be zero, indicating that
the ELOC will place all its emphasis on short-term variability and ignore the short-term average.
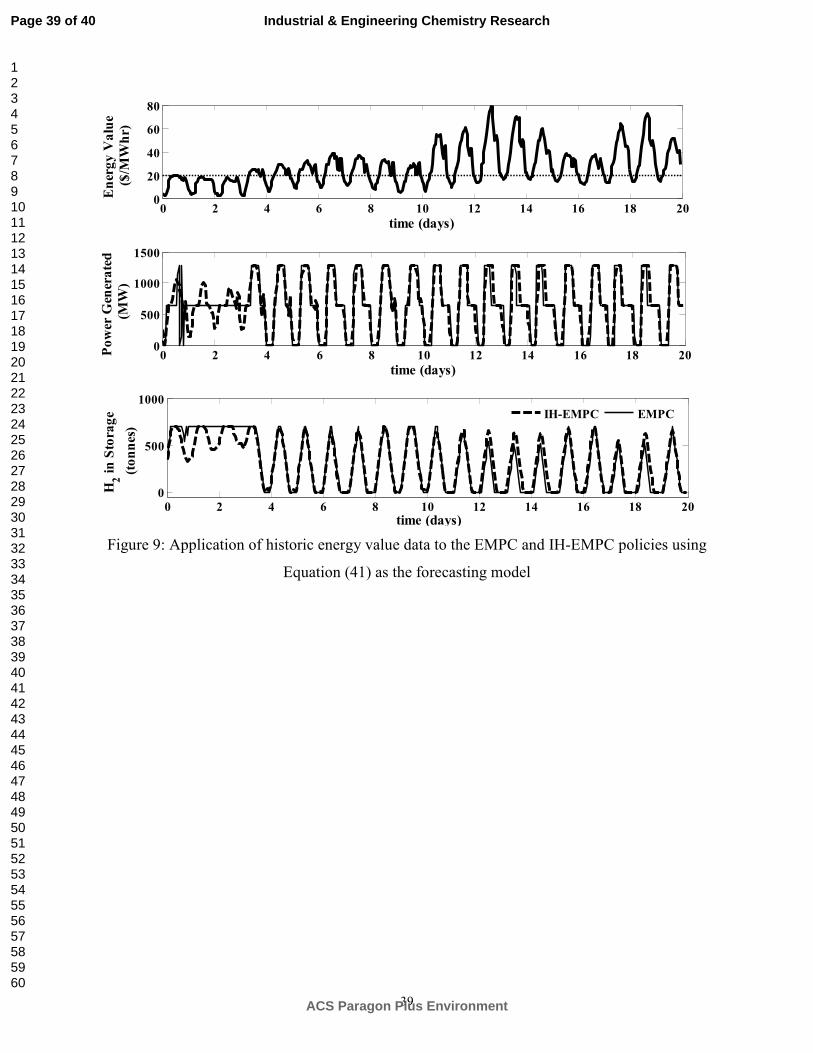
The result of using Equation (41) as the forecasting model is shown in Figure 9. In this case, both
policies perform much better. However, both still seem to have trouble when the short-term
average is significantly above or below eC . That is, in the first three days the policies hold on to
the H2 inventory for too long, and during the periods of 10-15 days and 17-20 days, the policies
do not store enough H2.
The problem stems from the fact that the policies think that the short-term variability can be
perfectly distinguished from the short-term average. However, in reality the state estimator
cannot perform this separation perfectly. Specifically, the estimator has available to it only the
energy value curve, which it models as the sum of φ1 and φ4. Then, it must separate the two
based only on frequency content. Thus, the problem with our previous IH-EMPC policy is that
the quality of the state estimator has not been communicated to the design procedure. To be able
Page 19 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

20
to communicate this estimator quality information, a Partial State Information (PSI) formulation
of the ELOC policy must be developed. We begin with a review of state estimation.
If given a process model )()()()1( iwGiuBixAix ddd ++=+ and a measurement equation
)()()( iFviCxiy += , where w and v are zero mean, Gaussian white noise sequences, then the
optimal (minimum error variance) state estimate, )(ˆ ix , is generated from the following system
[Anderson and Moore, 1979]:
( ))(ˆ)()()(ˆ)1(ˆ ixCiyKiuBixAix dd −++=+ (44)
where
( ) 1−Σ+ΣΣ= T
v
T
e
T
ed FFCCCAK (45)
and Σe is the positive definite solution to
( ) T
dwd
T
de
T
v
T
e
T
ed
T
dede GGACFFCCCAAA Σ+ΣΣ+ΣΣ−Σ=Σ−1
(46)
The following, easily verified, facts will be utilized in the subsequent development.
Fact 4.1: If the matrices Ad, C, Gd, Σw, F and Σv are block diagonal (with appropriate block
dimensions), then the matrices K and Σe will be block diagonal. Specifically, if Ad = diag{Adj},
C = diag{Cj}, Gd = diag{Gdj}, Σw = diag{Σwj}, F = diag{Fj}, and Σv = diag{Σvj}, then K =
diag{Kj} and Σe = diag{Σej} where
( ) 1−Σ+ΣΣ= T
jjvj
T
jjej
T
jjejdj FFCCCAK (47)
( ) T
jdjwjd
T
jdjej
T
jjvj
T
jjej
T
jjejd
T
djjejdjeGGACFFCCCAAA Σ+ΣΣ+ΣΣ−Σ=Σ
−1
(48)
Page 20 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

21
Fact 4.2: If the matrices Ad, C, Gd and F are defined as
=
=
=
=
02
01
02
01
0
0
0
0 and ,0
0,
0
0
F
FF
G
GG
C
CC
A
AA
d
d
d
d
d
d αα
αα
(49)
then
[ ]0201
0
2
2021
0210
2
1 and KKKee
eee αα
αααααα
=
ΣΣ
ΣΣ=Σ (50)
where 0K and 0e
Σ are from (47) and (48), with j = 0. Furthermore,
( )
( ) [ ]T
de
T
de
T
v
T
eT
ed
T
ed
T
de
T
v
T
e
T
ed
ACACFFCCCA
CA
ACFFCCCA
00020001
1
00000
0002
0001
1
ΣΣΣ+Σ
Σ
Σ=
ΣΣ+ΣΣ
−
−
αααα (51)
Covariance analysis under the PSI feedback structure, )(ˆ)( ixLiu = , utilizes two important
properties of optimal state estimation. First, the optimal estimate, )(ˆ ix , and the error signal,
)(ˆ)(ˆ)( ixixie −= , are orthogonal in that 0)]()(ˆ[ =ieixE . An immediate consequence of this fact
is that exx Σ−Σ=Σ ˆ . The second important property is that the innovations sequence, defined as
( ))(ˆ)(ˆ)( ixCiyKi −=η , is a zero mean, white noise process with covariance
( ) T
dev
T
e
T
ed ACFFCCCA ΣΣ+ΣΣ=Σ−1
η (52)
Thus, given the estimator system
)(ˆ)(ˆ)()(
)()(ˆ)()1(ˆ
ˆ ixDixLDixDiz
iixLBAix
xux
dd
++=
++=+ η (53)
Page 21 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

22
the variance of the jth element of z is calculated as
ζj = ρjΣzρjT (54)
T
xex
T
xuxxxuxz DDDLDDDLDD Σ+++Σ++=Σ )()( ˆˆˆ (55)
ηΣ++Σ+=Σ T
ddxddx LBALBA )()( ˆˆ (56)
Theorem 3: There exists stabilizing L, 0ˆ ≥Σx and ζj 0≥ , j = 1 … nz such that
( ) T
dev
T
e
T
ed
T
ddxddx ACCCCALBALBA ΣΣ+ΣΣ++Σ+=Σ−1
ˆˆ )()( (57)
T
j
T
xexj
T
j
T
xuxxxuxjj DDDLDDDLDD ρρρρζ Σ+++Σ++= )()( ˆˆˆ (58)
and ζj < 2
jz , j=1 … nz (59)
if and only if there exists X 0> , Y and jµ > 0, j=1 … nz such that
( )( )
( )0
0)(
0
)(
>
Σ+ΣΣ
+
Σ+
v
T
e
TT
ed
T
dd
T
eddd
CCCA
XYBXA
CAYBXAX
(60)
( )
( )0
)(
)(
ˆ
ˆ
>
++
++Σ−
XYDXDD
YDXDDDD
T
j
T
uxx
uxxj
T
j
T
xexjj
ρ
ρρρµ, j=1 … nz (61)
and jµ < 2
jz , j = 1 … nz (62)
proof: If the matrices Σ�, ��, Σ�, �� and ζi of Theorem 1 are redefined as Σ��, ��Σ���,
����� � ����, ������, and �� � ������� �� then Theorem 3 will result.
Example 3: This example will continue the scenarios of Examples 1 and 2, but update the
shaping filter model to (41) and extend the ELOC method to the PSI framework. Consider the
following block diagonal process model:
=
1
1
0
00
00
00
d
d
d
d
A
A
A
A
=
0
0
0d
d
B
B
=
12
11
0
0
0
0
d
d
d
d
G
G
G
G
αα
Σ
Σ=Σ
1
0
0
0
w
w
w (63)
Page 22 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

23
=
1
1
0
00
00
00
C
C
C
C
=
12
11
0
0
0
0
F
F
F
F
αα
Σ
Σ=Σ
1
0
0
0
v
v
v (64)
where the elements of the first block are Ad0 = 1, Bd0 = -∆ts /β1, Gd0 = ∆ts , C0 = F0 = 1,
svw t∆=Σ=Σ /)1.0( 2
00 and the element of the second block are stA
d eA∆= 1
1, ∫
∆
=st
tA
d dtGeG0
111 ,
sww tS ∆=Σ /1
and svv tS ∆=Σ /11where
−
−
−−−=
l
h
cccA
ττ
ωχωω
/1000
0/100
02
001022
1
=
l
h
cG
ττ
ω
/10
0/1
0
002
1
=
2
1
0
0
w
w
wS
SS (65)
1wS and 2wS are as in Equations (42) and (43), [ ]10011 =C , 11 =F and 2
1 )1.0(=vS . The
performance output is defined as [ ]210 xxxx DDDD = , [ ]TuD 110=
[ ]2ˆ1ˆ0ˆˆ xxxx DDDD = ,
where [ ]TxD 0010 = , 00ˆ21 === xxx DDD ,
−
=
0001
0000
0000
1x̂D and
−
=
1000
0000
0000
2x̂D (66)
Finally, the zmax and zmin vectors are as in Example 2.
The third row of the performance output indicates an enforcement of the following
constraint:
[ ] 22
41 )ˆˆ~( εφφ <−−GPE (67)
The first point about (67) is that the manipulated variable, PG, is being forced to track the
Page 23 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

24
estimates of the shaping filter states. This is appropriate since the controller does not have access
to the ‘true’ state values, which in reality do not even exist. The second point concerns the use of
α1 and α2 in (63) and (64), which will allow the optimization to select how much weight it will
give to the short term variability, 11 /ˆ αφ , and how much to give to the short term average, 24 /ˆ αφ .
An evaluation of the average revenue in the context of (67), yields the following expression
[ ] 2211
~~αα ddCPE eG += (68)
where T
x
T
xd 41ˆ111ˆ11 ρρρρ Σ+Σ= , T
x
T
xd 41ˆ441ˆ12 ρρρρ Σ+Σ= , 111ˆ exx Σ−Σ=Σ , 1eΣ is the positive
definite solution to (48), with j = 1, and 1xΣ satisfies T
dwd
T
dxdx GGAA 1111111 Σ+Σ=Σ . Finally, use of
Theorem 3, along with Facts 4.1 and 4.2, the PSI version of the ELOC design problem, in
convex form, is stated as
{ }2211
,,,0,
21
max ααααµ
dd
j
XY+
≥ (69)
( )( )
( )
( )
( )( )
3...1},,min{
0
0
0
0
0
0
)(
)(
0
0
0
..
minmax
2
1112
1111
000
1
1111
00000
ˆ
ˆ
01
1
=−=
<
Σ
Σ
Σ
=
Σ+Σ
Σ+Σ=
>
++
++Σ−
>
+
+
jzzz
z
CA
CA
CA
M
CC
CCM
XYDXDD
YDXDDDD
MM
XYBXA
MYBXAX
ts
jjj
jj
T
ed
T
ed
T
ed
v
T
e
v
T
e
T
j
T
uxx
uxxj
T
j
T
xexjj
T
T
dd
dd
µ
αα
ρ
ρρρµ
Page 24 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
25
The solution to problem (69) is found to be α1* = 87.3 MW2hr/$ and α2* = -47.0 MW2hr/$ and
[ ]45.13-00000.53857.861-86.580.0445=ELOCL (70)
The fact that α2* turns out to be negative indicates that the policy recognizes a correlation
between 1φ̂ and 4φ̂ , in the sense that when the short-term average of 1φ̂ is greater than zero, the
short-term average of 4φ̂ will also be positive. Thus, the selection of a negative α2*, which
manifests as a negative value for the 9th element of LELOC, and has the effect of canceling out the
short-term average of 1φ̂ .
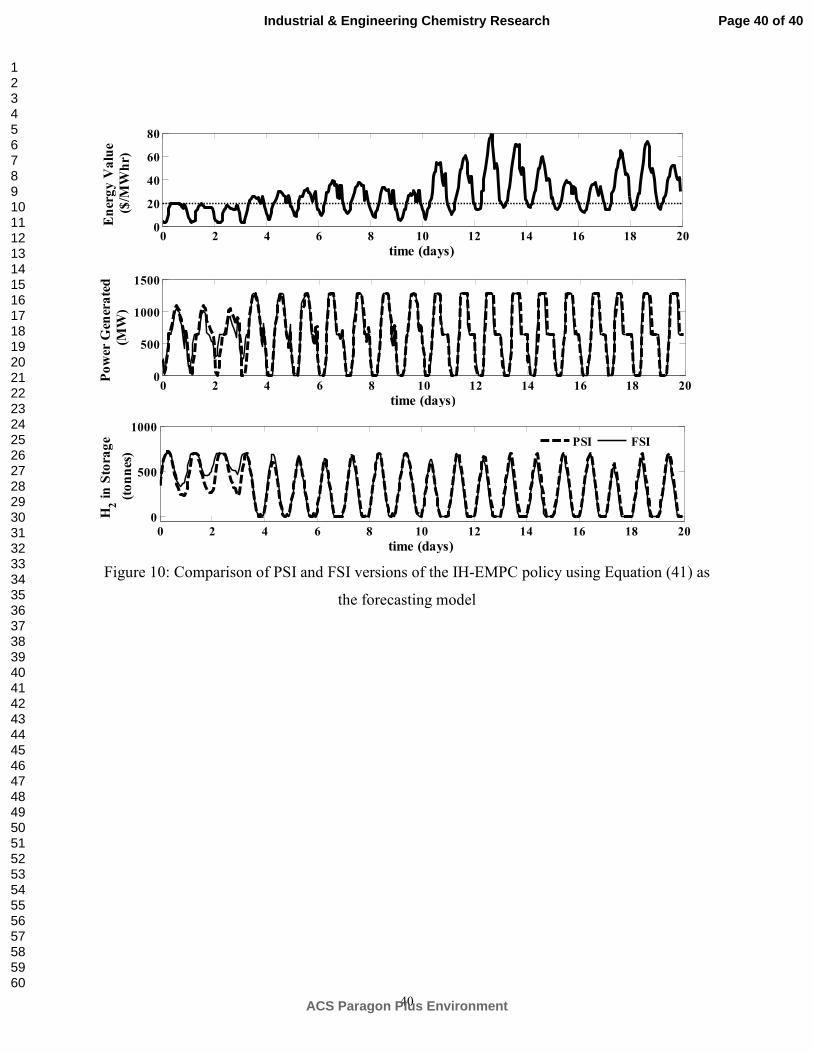
The plots of Figure 10 compare the PSI and FSI versions of the IH-EMPC policy. While
these trajectories appear to be very similar, the PSI policy uses more of the dispatch capabilities.
To see this improvement the closed-loop revenue using 3 months of historic data (June-August,
2001 from [PJM, 2012]) was calculated. As seen in Table 1, the revenue increase resulting from
the PSI policy is 2.1 percentage points greater than that of the FSI policy. It is also worth noting
that the PSI policy achieves almost 90% of the revenue increase that would be realized if given
perfect forecasting.
VI. CONCLUSIONS
In this work we have introduced the notion of EMPC as a method to maximize revenue from a
dispatch capable IGCC power plant. However, this EMPC policy was found to possess a number
of shortcomings, including inventory creep and the existence of bang-bang type actuation. To
alleviate these issues a new economic based linear optimal control policy (ELOC) was
developed, and through the use of inverse optimality on the ELOC policy an infinite-horizon
formulation of the EMPC policy was developed. This policy was shown to possess very
attractive characteristics, but seemed to fail if the energy value data possessed non-zero short-
term averages. To address this issue, a partial state information version of the IH-EMPC policy
was developed and shown to perform quite well in the face of non-zero short-term averages.
Concerning the ELOC policy, it is highlighted that relation (10) is critical to achieving a
convex approach to the determination of the ELOC feedback gain. However, as illustrated in
Page 25 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

26
Section V, a modification of this relation, from (10) to (67), was required to address non-zero
short-term averages in energy value as well as the PSI framework. What we can say with
certainty is that the imposition of relations similar to (10) will be case specific and it is an open
question as to the existence of a generic relation applicable to all situations. Consider, for
example, the case of a system being driven by disturbances other than the value of electricity. In
[Mendoza-Seriano and Chmielewski, 2012a, 2012b], a relation similar to (10) included a second
weighted term that was proportional to a signal orthogonal to eC~
. This additional degree of
freedom allowed the manipulated variable to range from full correlation with eC~
to zero
correlation with eC~
.
Another important question concerns the assumption of the ELOC being restricted to an
unstructured linear feedback of the state, or state estimate. In general, this assumption is
required to guarantee problem (31) will be convex. For example, if a nonlinear controller was
allowed, then equations (20)-(22) would have to be replaced with Fokker-Planck relations that
could not be converted to convex constraints. It is also noted that restricting the linear feedback
gain, !, to being in some way structured will again preclude conversion of (20)-(22) to a convex
form. However, as highlighted in Section V, suitable selection of the shaping filter can provide
an approximation of integral action.
In Section V, we jumped to the case of imperfect forecasting to illustrate how to implement
the IH-EMPC using energy value data not generated by the shaping filter. Thus, the question
remains of how to implement the IH-EMPC if perfect forecasts are available (or alternatively if
high quality forecast from a black-box model, unavailable to the IH-EMPC, are provided). One
approach is to extend the methods of Section V. Specifically, convert the state predictor to a state
smoother by considering forecasts as measurements (at future times) to obtain a higher quality
sequence "�#|%�. In this case, the variance of the noise added to future measurements could be
set to commensurate with their quality (small for near future and large for distant future). The
downside of this approach is that the shaping filter may not have enough structure to capture the
details of the high quality forecasts, especially if the variance of the measurement noise is
assumed very small, and will result in sub-optimality due to modifications of the forecasts.
Thus, an alternative approach is to modify problem (38) to a form similar to (9), but with the
terminal cost term included. In this case, the electricity value used in the terminal cost term
Page 26 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
27
would need to be the state estimate at time i+N, based on the forecast provided up to time i+N.
This type of controller (IH-EMPC with perfect forecast) is expected to have performance
bracketed between two of the previously discussed controllers. Specifically, for large horizons it
will approach the EMPC with perfect forecast and for small horizons it will approach the IH-
EMPC with imperfect-forecast. The details of IH-EMPC with perfect forecast will be presented
in future work.
ACKNOWLEDGEMENTS
D. Chmielewski would like to thank I. Grossmann and R. Lima for a number of insightful
discussions that served as foundation and motivation for this work. Both authors would like to
thank the National Science Foundation (CBET-0967906) for financial support.
REFERENCES
Anderson, B.D.O. and J.B. Moore (1979) Optimal Filtering, Prentice Hall, Englewood Cliffs, NJ
Baumrucker, B.T. and L.T. Biegler (2010) MPEC strategies for cost optimization of pipeline
operations, Comp. Chem. Eng., vol. 34, pp 900–913
Braun, J.E. (1992) A comparison of chiller-priority, storage-priority, and optimal control of an
ice-storage system, ASHRAE Trans., vol. 98(1), pp 893-902
Braun, J.E. (2007) Impact of control on operating costs for cool storage systems with dynamic
electric rates, ASHRAE Trans., vol. 113(2), pp343-354.
Bequette, B.W. and P. Mahapatra (2010) Model predictive control of integrated gasification
combined cycle power plants, DOE - Technical Report (OSTI ID: 1026486)
Burl, J.B (1999) Linear Optimal Control, Addison-Wesley, Menlo Park, CA
Chmielewski, D. J. and V. Manousiouthakis (1996) On constrained infinite-time linear quadratic
optimal control," Sys. & Cont. Let., 29, p 121.
Chmielewski, D.J. and A.M. Manthanwar (2004) On the tuning of predictive controllers: Inverse
optimality and the minimum variance covariance constrained control problem, Ind. Eng.
Chem. Res., 43, pp 7807-7814
Diehl, M., R. Amrit and J.B. Rawlings (2011) A Lyapunov function economic optimizing model
predictive control, IEEE Trans. Aut. Contr. Vol 56(3), pp 703-707
Page 27 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

28
Heidarinejad, M., J. Liu, P.D. Christofides (2012) Economic model predictive control of
nonlinear process systems using Lyapunov techniques, AIChE J., vol 58, pp. 855–870
Henze, G.P., M. Krarti, M.J. Brandemuehl (2003) Guidelines for improved performance of ice
storage systems, Energy and Buildings, vol. 35, pp 111-127.
Huang, R. and L. Biegler (2011) Stability of economically-oriented NMPC with periodic
constraint, Preprints of 18th IFAC World Congress, Milano, Italy, pp 10499- 10504
Jones, D., D. Bhattacharyya, R. Turton and S.E. Zitney (2011) Optimal design and integration of
an air separation unit (ASU) for an integrated gasification combined cycle (IGCC) power
plant with CO2 capture, Fuel Proc. Tech., vol. 92(9), pp 1685-1695
Karwana, M.H. and M.F. Keblisb (2007) Operations planning with real time pricing of a primary
input, Comp. Oper. Res., vol. 34, pp 848–867
Kintner-Meyer, M. and A.F. Emery (1995) Optimal control of an HVAC system using cold
storage and building thermal capacitance, Energy and Buildings, vol. 23, pp 19-31.
Kostina, A.M., G. Guillén-Gosálbeza, F.D. Meleb, M.J. Bagajewiczc, L. Jiméneza (2011) A
novel rolling horizon strategy for the strategic planning of supply chains: Application to the
sugar cane industry of Argentina, Comp. Chem. Eng., vol. 35, pp 2540– 2563
Lima, R.M., I.E. Grossmann and Y. Jiao (2011) Long-term scheduling of a single-unit multi-
product continuous process to manufacture high performance glass, Comp. Chem. Eng., vol.
35(3), pp 554–574
Mahapatra, P. and B.W. Bequette (2010) Process design and control studies of an elevated-
pressure air separations unit for IGCC power plants, Proc. Am. Cont. Conf. Baltimore, MD,
pp 2003-2008
Manousiouthakis, V. and D. J. Chmielewski, (2002) On constrained infinite-time nonlinear
optimal control," Chem. Eng. Sci., 57, pp 105-114.
Mendoza-Serrano, D.I. and D.J. Chmielewski (2012a) Infinite-horizon Economic MPC for
HVAC systems with Active Thermal Energy Storage, Proc. of the Conf. Dec. Contr.,
Honolulu, HI (in press)
Mendoza-Serrano, D.I. and D.J. Chmielewski (2012b) Controller and system design for HVAC
with Thermal Energy Storage, Proc. of the Am. Cont. Conf., Montreal, Canada, pp 3669 -
3674
Page 28 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
29
Morris, F.B., J.E. Braun and S.J. Treado (1994) Experimental and simulated performance of
optimal control of building thermal storage, ASHRAE Trans., vol. 100(1), pp 402-414.
NETL (2007) Cost and performance baseline for fossil energy plants , Volume 1: Bituminous
coal and natural gas to electricity (DOE/NETL-2007/1281)
PJM (2012) PJM Day-Ahead Historical Data: http://www.pjm.com/markets-and-
operations/energy/day-ahead/day-ahead-historical.aspx (accessed on March 30, 2012)
Rawlings, J.B. (2000) Tutorial overview of model predictive control, IEEE Contr. Sys. Mag.,
vol. 20(3), pp 38-52
Rawlings, J.B. and R. Amrit (2009) Optimizing process economic performance using model
predictive control, Nonlinear Model Predictive Control, Lecture Notes in Control and
Information Sciences, Vol. 384, pp 119-138
Robinson, P.J and W.L. Luyben (2011) Plantwide control of a hybrid integrated gasification
combined cycle / methanol plant, Ind. Eng. Chem. Res., vol. 50(8), pp 4579-4594
Yang, M.W., B.P Omell and D.J. Chmielewski (2012) Controller design for dispatch of IGCC
power plants, Proc. Am. Contr. Conf., Montreal, Canada, pp 4281 – 4286
Page 29 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

30
Table 1 – Calculated policy revenues over 3 month period (all using 24 hour horizon)
Case Revenue (103 $/day) Revenue Increase
No Dispatch 557.6 -
EMPC: Perfect Forecast 765.7 27.2%
EMPC: Imperfect Forecast 683.9 18.5%
IH-EMPC: Imperfect Forecast (FSI) 713.5 21.9%
IH-EMPC: Imperfect Forecast (PSI) 736.0 24.0%
Page 30 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

31
Figure 1: Simplified process diagram of IGCC power plant (with carbon capture) and possible equipment upgrades to achieve dispatch capabilities
Page 31 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
32
Figure 2: Simplified process diagram of IGCC power plant with H2 storage
Page 32 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

33
Figure 3: Closed-loop simulation of EMPC using a 24 hour prediction horizon
0 1 2 3 4 5 6 7 8 9 100
20
40
time (days)
Energy V
alue
($/M
Whr)
0 1 2 3 4 5 6 7 8 9 10
0
500
1000
1500
time (days)
Gen
erated Power
(MW
)
0 1 2 3 4 5 6 7 8 9 100
200
400
600
800
time (days)
H2 in Storage
(tonnes)
Page 33 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
34
Figure 4: Comparison of EPMC using different prediction horizons
6 6.5 7 7.5 8 8.5 9 9.5 100
20
40
time (days)
Energy V
alue
($/M
Whr)
6 6.5 7 7.5 8 8.5 9 9.5 10
0
500
1000
1500
time (days)
Gen
erated Power
(MW
)
6 6.5 7 7.5 8 8.5 9 9.5 100
500
1000
time (days)
H2 in Storage
(tonnes)
24 hr horizon
6 hr horizon
Page 34 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

35
Figure 5: Comparison of the ELOC policy and the EMPC policy (24 hour prediction horizon)
0 1 2 3 4 5 6 7 8 9 10-20
0
20
40
time (days)
Energy V
alue
($/M
Whr)
0 1 2 3 4 5 6 7 8 9 10
-2000
0
2000
4000
time (days)
Power G
enerated
(MW
)
0 1 2 3 4 5 6 7 8 9 10-1000
0
1000
2000
time (days)
H2 in Storage
(tonnes)
ELOC
EMPC
Page 35 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
36
Figure 6: Comparison of the IH-EMPC and the EMPC policies using a 24 hour horizon
0 1 2 3 4 5 6 7 8 9 10-20
0
20
40
time (days)
Energy V
alue
($/M
Whr)
0 1 2 3 4 5 6 7 8 9 100
500
1000
1500
time (days)
Power G
enerated
(MW
)
0 1 2 3 4 5 6 7 8 9 100
500
1000
time (days)
H2 in Storage
(tonnes)
EMPC IH-EMPC
Page 36 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

37
Figure 7: Comparison of the IH-EMPC policies using different horizons
0 1 2 3 4 5 6 7 8 9 100
500
1000
1500
time (days)
Power G
enerated
(MW
)
24 hr horizon 6 hr horizon
0 1 2 3 4 5 6 7 8 9 100
500
1000
1500
time (days)
Power G
enerated
(MW
)
24 hr horizon 1 hr horizon
Page 37 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960

38
Figure 8: Application of historic energy value data to the EMPC and IH-EMPC policies using
Equation (12) as the forecasting model
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80
time (days)
Energy V
alue
($/M
Whr)
0 2 4 6 8 10 12 14 16 18 200
500
1000
1500
time (days)
Power G
enerated
(MW
)
0 2 4 6 8 10 12 14 16 18 20
0
200
400
600
800
time (days)
H2 in Storage
(tonnes)
IH-EMPC
EMPC
Page 38 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
39
Figure 9: Application of historic energy value data to the EMPC and IH-EMPC policies using
Equation (41) as the forecasting model
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80
time (days)
Energy V
alue
($/M
Whr)
0 2 4 6 8 10 12 14 16 18 200
500
1000
1500
time (days)
Power G
enerated
(MW
)
0 2 4 6 8 10 12 14 16 18 200
500
1000
time (days)
H2 in Storage
(tonnes)
IH-EMPC EMPC
Page 39 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960
40
Figure 10: Comparison of PSI and FSI versions of the IH-EMPC policy using Equation (41) as
the forecasting model
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80
time (days)
Energy V
alue
($/M
Whr)
0 2 4 6 8 10 12 14 16 18 200
500
1000
1500
time (days)
Power G
enerated
(MW
)
0 2 4 6 8 10 12 14 16 18 20
0
500
1000
time (days)
H2 in Storage
(tonnes)
PSI FSI
Page 40 of 40
ACS Paragon Plus Environment
Industrial & Engineering Chemistry Research
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960