hscc 03 mit lcs safety verification of model helicopter controller using hybrid input/output...
TRANSCRIPT

HSCC 03 MIT LCS
Safety Verification of Model Helicopter Controller Using Hybrid Input/Output
Automata
Sayan Mitra
MIT
Hybrid Systems: Computation and Control
Prague, Czech Republic
2003
Joint work with Yong Wang (U. Beijing), Nancy Lynch, Eric Feron
HSCC 03 MIT LCS
Verification Techniques
• Algorithmic– Model checking e.g. [Alur, et al. 95]
• Automatic: HyTech• Essentially for finite-state systems, subclass of linear hybrid
systems
– Over approximating set of unsafe states [Bayen, et al. 02]
• Deductive – Invariant assertions, simulation relations e.g. [Manna,
Sipma 98]• Can accommodate infinite-state systems: STeP• Requires human effort
– User interaction

HSCC 03 MIT LCS
Talk Outline
• Introduction٭ • Hybrid I/O Automata definitions
• Specification of Quanser
• Safety Verification
• Conclusions

HSCC 03 MIT LCS
The HIOA Model[Lynch, Segala, Vaandrager 01, 03]
• General, mathematical modeling framework.– States, discrete transitions
– Trajectories: Maps left closed intervals of time to variable values
• Support for decomposing hybrid system descriptions:– External behavior: Models interaction of component with
environment.
– Composition: Synchronizes external actions, external “flows”; respects external behavior.
– Levels of abstraction: Implementation notion
• Can incorporate analysis methods from:– CS: Invariants, simulation relations, compositional methods.
– Control theory: Invariant sets, stability analysis, robust control.

HSCC 03 MIT LCS
Hybrid I/O Automaton • V = U Y X: Input, output, and internal (state)
variables• Q: States, a set of valuations of X Q : Start states• A = I O H: Input, output, and internal actions• D Q A Q: Discrete transitions• T: Trajectories for V.
XU Y
I O
H

HSCC 03 MIT LCS
Trajectory Axioms and Executions
• Set T of trajectories is closed under:– Prefix– Suffix– Countable concatenation
• fstate, lstate
• Execution fragment: 0 a1 1 a2 2 …, where:• Each i is a trajectory of the automaton and• Each ( i.lstate, ai , i+1.fstate) is a discrete step.
• Execution:– Execution fragment beginning in a start state.

HSCC 03 MIT LCS
Model Helicopter System• Manufactured by Quanser• User controllers not necessarily safe, can crash
the helicopter on the table.• Supervisory pitch controller needed to ensure
safety.– Safe operating region– Saturated actuator outputs : Umin or Umax
• Must contend with– Sensor errors– Actuator delay

HSCC 03 MIT LCS
Helicopter System
UserCntrlUseroutput(Xu)
Sam
ple
Supervisor
Actuator SensorPlant
θ0 , θ1
U
Com
mand(S)
now, nextbuffer, u
Xu
dequeue
Sample
θ0 , θ1
mode, Xs , S,
rt
Com
mand(S)
Com
mand(S)
Sample
Sample
Useroutput(Xu)
Sample

HSCC 03 MIT LCS
Plant
θ0 ,θ1
U
PlantVariables:
θ0 : Pitch angle
θ1: Pitch velocity
Trajectories:evolve: d(θ0) = θ1
d(θ1) = -Ω2cos θ0 + U
Input bounds:Umin , Umax
Safe Region:S = { s | θmin ≤ s.θ0
≤ θmax }
θ0 , θ1

HSCC 03 MIT LCS
Sensor
Discrete transition:Sample(θ0
d , θ1d )
precondition: now = next
and θ0d є [θ0- є0 , θ0+ є0 ]
and θ1d є [θ1
- є1, θ1 - є1]
effect: next = next + Δ
Trajectories:evolve: d(now) = 1
stopping condition: now = next
Sensor
Sample(θ
0d , θ1d )
θ0 ,θ1
now, next
}Nondeterministic choice

HSCC 03 MIT LCS
User Controller
• Arbitrarily bad user
• On receiving Sample,– Useroutput(Xu)
– Non deterministic choice, Xu є [Umin, Umax ]

HSCC 03 MIT LCS
Actuator
• Actuator delay Ta
– modeled as a FIFO queue of Supervisor(User) outputs
– buffer: length [Ta / Δ]
• Enqueue S received from supervisor
• Dequeue u from buffer head, – u changes discretely– Made into piece-wise continuous output U

HSCC 03 MIT LCS
Modeling Actuator Delay
• Ta Currently modeled as a single discrete jump from Umin to Umax after time Ta.
• Alternatively– Approximate exponential rise by
adding k intermediate values in the buffer, for every command from the supervisor.
• Output from buffer will change every Δ/k time.
– Model as continuous function
Ta
HSCC 03 MIT LCS
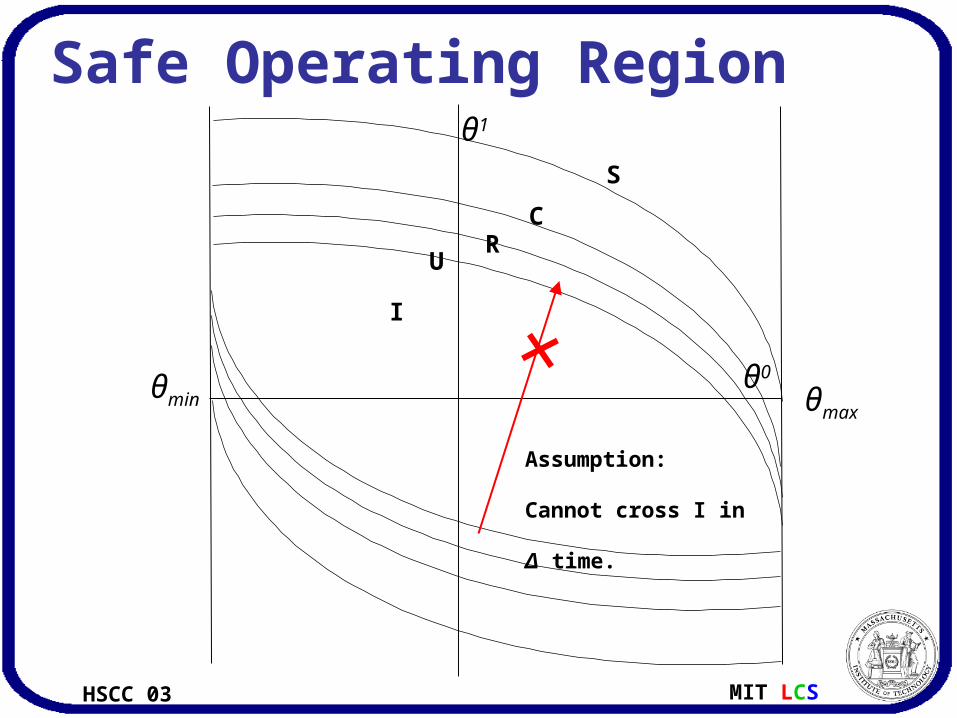
I
S
CR
U
θmax
θ1
Assumption: Cannot
cross I in Δ time.
θmin
Safe Operating Region
θ0

HSCC 03 MIT LCS
Supervisor
• On receiving sample, computes Xs
• If s is above I+ then Xs = Umin
• If s is below I- then Xs = Umax
• On receiving useroutput(Xu), computes S – If mode = user then
• If s is in U then S = Xu
• Else mode = supervisor ; S = Xs
– If mode = supervisor then• If s is in I then S = Xu ; mode = user
• Else S = Xs
Supervisor
mode, Xs , S,
rt
Command(S)
Userout(Xu)
Sample

HSCC 03 MIT LCS
Safety Verification
• Assertional Proofs– Reasoning based on current state of the system
• Finding the invariants is challenging– Strengthen statement
• Proofs are easy, for proving I– Base case: I– Discrete part: s a s’ є D,
show I(s) implies I(s’)– Continuous part: closed τ є T,
show I(fstate(τ)) implies I(lstate(τ))

HSCC 03 MIT LCS
Key Lemmas
• All trajectories are closed
• Any trajectory τ є T, ltime(τ) - ftime(τ) ≤ Δ.

HSCC 03 MIT LCS
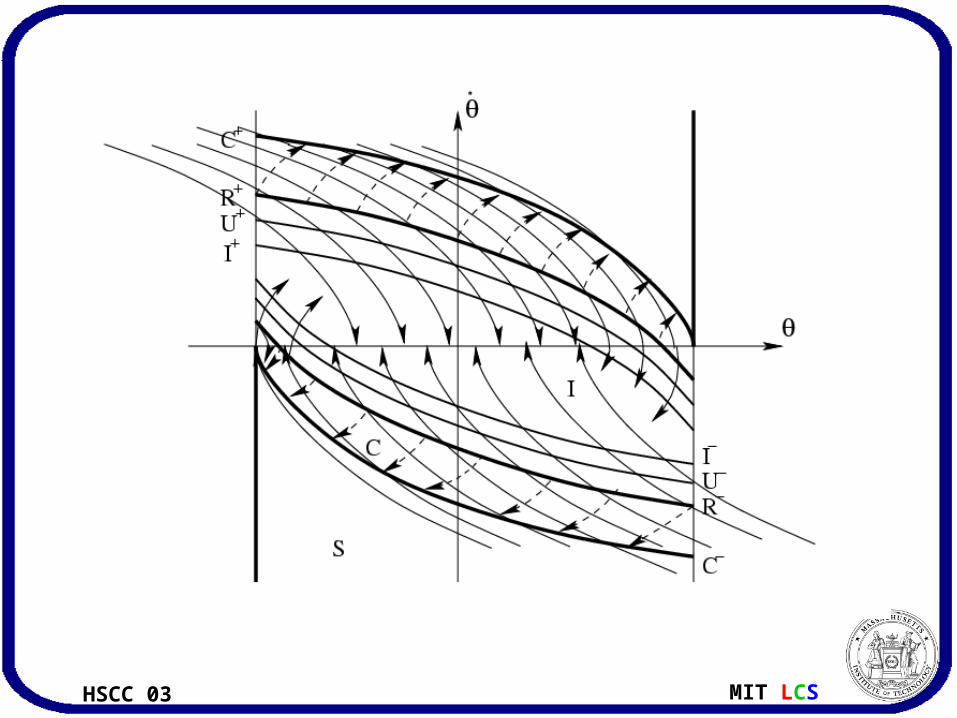
I
SCA0
θ0
θ1
A1 A2 AΔ
A0 = R
For 0 ≤ t ≤ t’ ≤ Δ
At’ At
U AΔ
RU
User mode

HSCC 03 MIT LCS
User mode
Safety
• Any reachable state in the user mode is within R.
• Proof:– Discrete part is easy
– Any closed trajectory τ є T, if fstate(τ) є At then lstate(τ) є At-ltime(τ).

HSCC 03 MIT LCS
Executions in User and Supervisor modes
Cannot go outside R from U, in the user mode
buffer flushed, Supervisor mode kicks in.
Returns to I and mode switches back to user .
mode switches to supervisor, but
buffer contains stale user commands.

HSCC 03 MIT LCS
Supervisor mode
Correct input to plant• If s is above I+
then last [rt/Δ] entries in buffer are Umin– rt: stopwatch for supervisor mode
• Similarly, s is below I- then … Umax
Settling phase rt ≤ Ta
• Any reachable state is within C– All trajectories starting from within R remains within C – Proof similar to User mode
Recovery phase rt > Ta
• Any reachable state is within C– Proof: At any point on boundary of C, the vector field points
inwards

HSCC 03 MIT LCS
Conclusions
• Design of supervisory controller– Controller has been implemented [Ishutkina].
• Specification Language • Demonstration of HIOA framework
– Specification• Compositional• Nondeterminism models uncertainties in devices or user inputs.
– Purely assertional proofs• Discrete and continuous parts• CS and Control Theory techniques
• Current/Future Work– Performance guarantees for mobile computing algorithms– Theorem prover support

HSCC 03 MIT LCS
Thank You.
Questions
?
HSCC 03 MIT LCS
HSCC 03 MIT LCS
Current/Future Work
• Incorporate control theory methods:– Invariant sets, Stability analysis using Lyapunov
functions, robust control methods.
• More examples:– Systems with more complicated discrete behavior and
dynamics, e.g. mobile computing, embedded systems.
• Develop analysis tools for HIOA programs: – Theorem-provers, automated tools– As extension to IOA toolset