gnss in autonomous vehicles mm vision - eu-japan · gnss in autonomous vehicles mm vision mm...
TRANSCRIPT

GNSS in Autonomous Vehicles
MM VisionMM Technology Innovation
Automated Driving Technologies (ADT)
Evaldo Bruci
March 2017

MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential 2March 2017
Context & motivation
Within the robotic paradigm
Magneti Marelli chose Think & Decision as the key item for study,
development, prototyping, product planning
Our framework platform is called:
Cognitive Fusion Framework (CFF)

VDe1.0
SmartSensor
SmartSensor
ActuationSmartSensor
Smart Sensor
SmartSensor
Automated Driving: Architecture
3
VDe2.0
Sensor
Sensor
ActuationSensor
Sensor
Sensor
Distributed CentralizedMixed
MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential March 2017
2015 2017 20182016

From perception to movement
4
Perception Layer
Decision Layer
Actuation Layer
Data Fusion Layer
Sensor Fusion Layer
Planning & Decision
(Action & Path)
Vehicle Control
Cognitive Fusion Framework Perimeter
Data Fusion
Environmental
Awareness
Behavioral
Prediction
Maps & Positioning
GPS IMU
Visual Odometry
Maps
Sensor Fusion
Lidar
Camera
Radar
Ultrasounds
[Ref. JDL Model]
MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential March 2017

5
Sensor &
Data Fusion
Environment
Awareness
Behavioral
prediction
MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential March 2017
Fusion to create an environmental model
Source: http://spectrum.ieee.org/cars-that-think/transportation/self-
driving/google-autonomous-cars-are-smarter-than-ever

Decide if and how to move
6
Path Planning
Action Planning
Keywords
Risk Assessment
Deep Neural Networks
Keywords
Trajectory estimate
MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential March 2017
ComfortFuel EfficiencySafety

Localize with high precision
7
HD Maps Lane detection/visual map matching
MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential March 2017
Precise GNSS Precise Inertial sensorsMap Manager
&
Precise Positioning
8
Magneti Marelli PoC demonstrated in 2016
Highway use case
Automatic Valet Parking use case
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential

9
Magneti Marelli PoC under development
Urban use case
Long distance Highway use case
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential
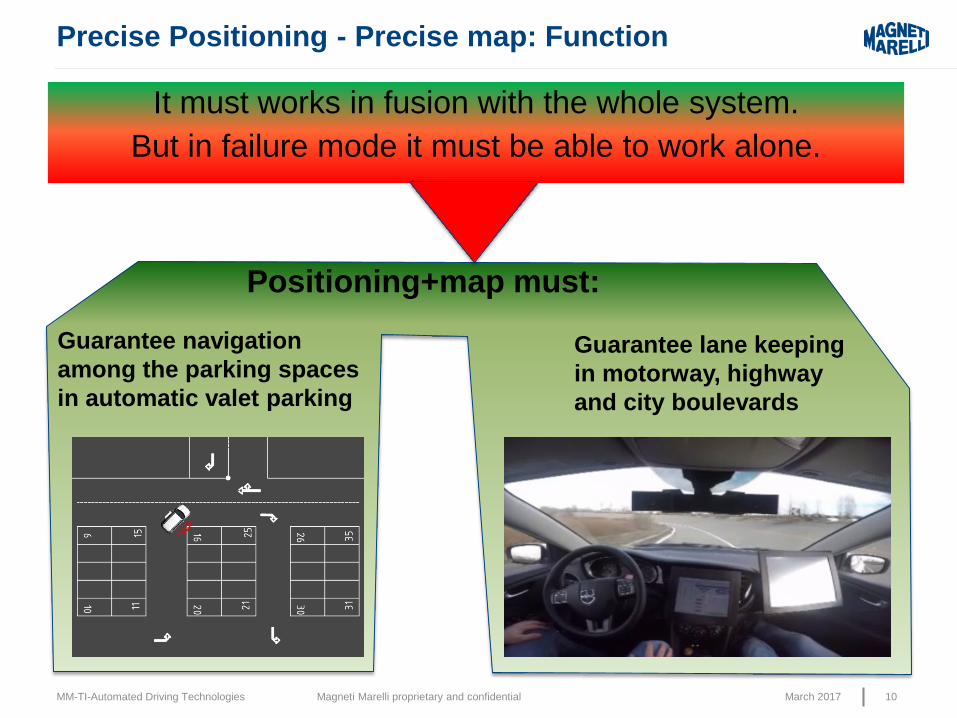
Precise Positioning - Precise map: Function
10
Positioning+map must:
It must works in fusion with the whole system.
But in failure mode it must be able to work alone.
Guarantee navigation
among the parking spaces
in automatic valet parking
Guarantee lane keeping
in motorway, highway
and city boulevards
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential

11
Precise Positioning – Precise map: Target accuracy
Target accuracy: Positioning accuracy :
● 20 cm
Cartography accuracy:
● 20 cm max error on node coordinates
Strategy for achievemnt: Positioning accuracy :
● Accurate sensors
● Well designed sensor fusion
● GNSS Ultra tight integration
● GNSS PPP – RTK
● Visual Map Matching
Cartography:
● Work on requirements with suppliers
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential

12
GNSS – Phase detection
Strategy Pro’s Con’s
PPP • Function suitable for
automotive
• Subscription price not yet at
automotive level
• Receiver price not yet at
automotive level
RTK • Require additional
communication channel
• Low-zero price available,
but not world wide spread
• Receiver price not yet at
automotive level
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential

13
GNSS – Cost consideration
Reasonable autonomous car price 30-50 Keuro
The cost of a GNSS with phase detection capability is still
between 1 and 10 KEuro
COST IS THE BLOCKING FACTOR
Automotive cost is the key issue for GNSS
success in autonomous driving
• Receivers
• Services
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential

14
The strategy is cooperation with suppliers: GNSS engine suppliers
PPP – RTK corrections providers
Points to be exploited : Accurate definition of the products specification’s
Advantage of automotive level mass production
GNSS – Cost consideration
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential

15
Precise Positioning – Ultra tight integration
Highly promising in terms of GNSS reliabilty/Integrity
Accuracy increase is espected
No added cost in the final product
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential

16
Precise Positioning – Visual map matching
An autonomous vehicle must have Cameras/Laser scanners
No added cost in the final product
March 2017MM-TI-Automated Driving Technologies Magneti Marelli proprietary and confidential

Thank you
March 2017