using rtk gnss wiselyc.ymcdn.com/sites/ rtk gnss wisely todd horton, pe, pls 1 michigan society of...
TRANSCRIPT
Using RTK GNSS Wisely
1Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
Using RTK
GNSS Wisely
Todd Horton, PE, PLSFebruary 2017
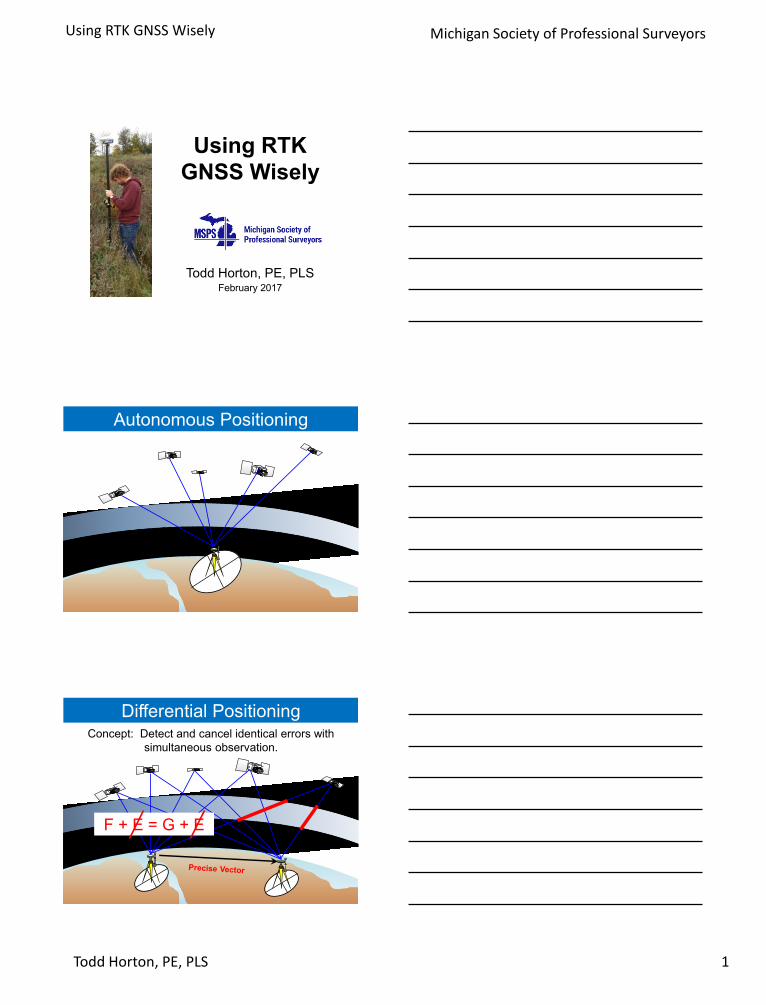
Autonomous Positioning
Differential PositioningConcept: Detect and cancel identical errors with
simultaneous observation.
F + E = G + E
Using RTK GNSS Wisely
2Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
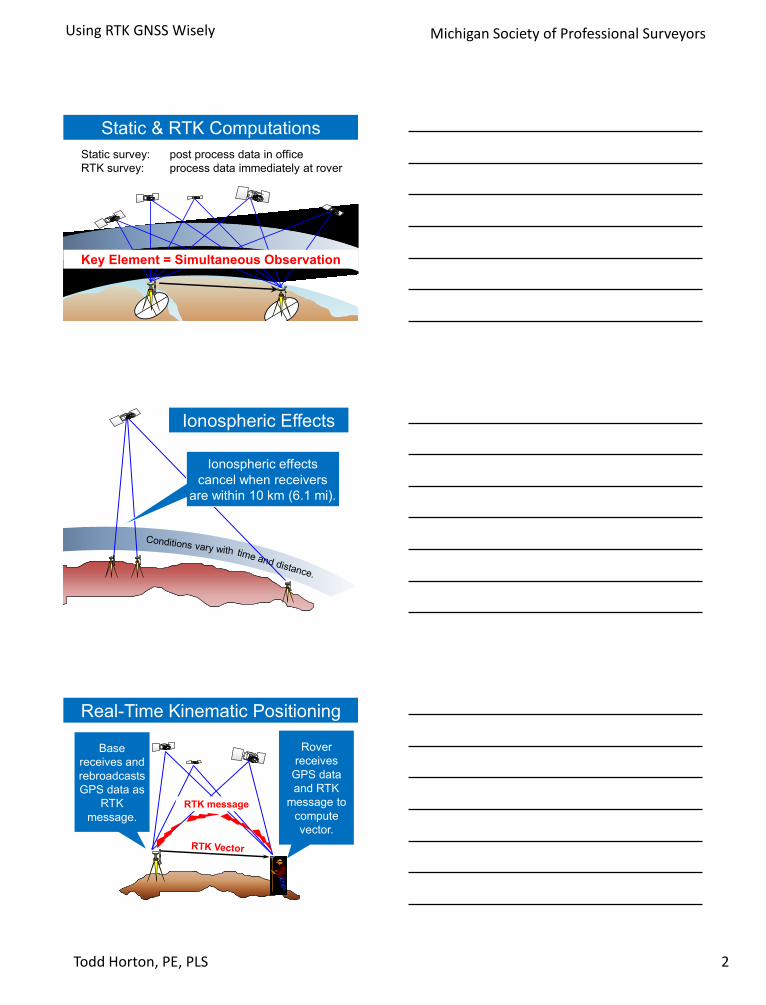
Static & RTK Computations
Static survey: post process data in office
RTK survey: process data immediately at rover
Key Element = Simultaneous Observation
Ionospheric Effects
Ionospheric effects
cancel when receivers
are within 10 km (6.1 mi).
Real-Time Kinematic Positioning
RTK message
Base
receives and
rebroadcasts
GPS data as
RTK
message.
Rover
receives
GPS data
and RTK
message to
compute
vector.
Using RTK GNSS Wisely
3Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
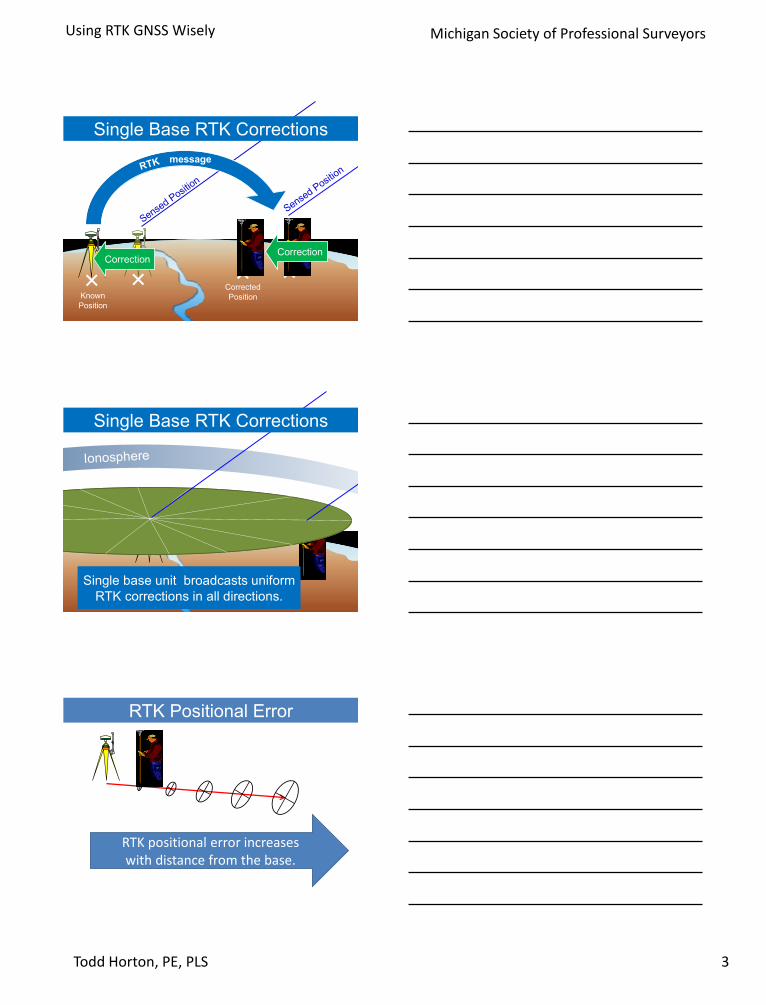
Single Base RTK Corrections
Known
Position
CorrectionCorrection
Corrected
Position
message
Single base unit broadcasts uniform
RTK corrections in all directions.
Single Base RTK Corrections
RTK Positional Error
RTK positional error increases with distance from the base.
Using RTK GNSS Wisely
4Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
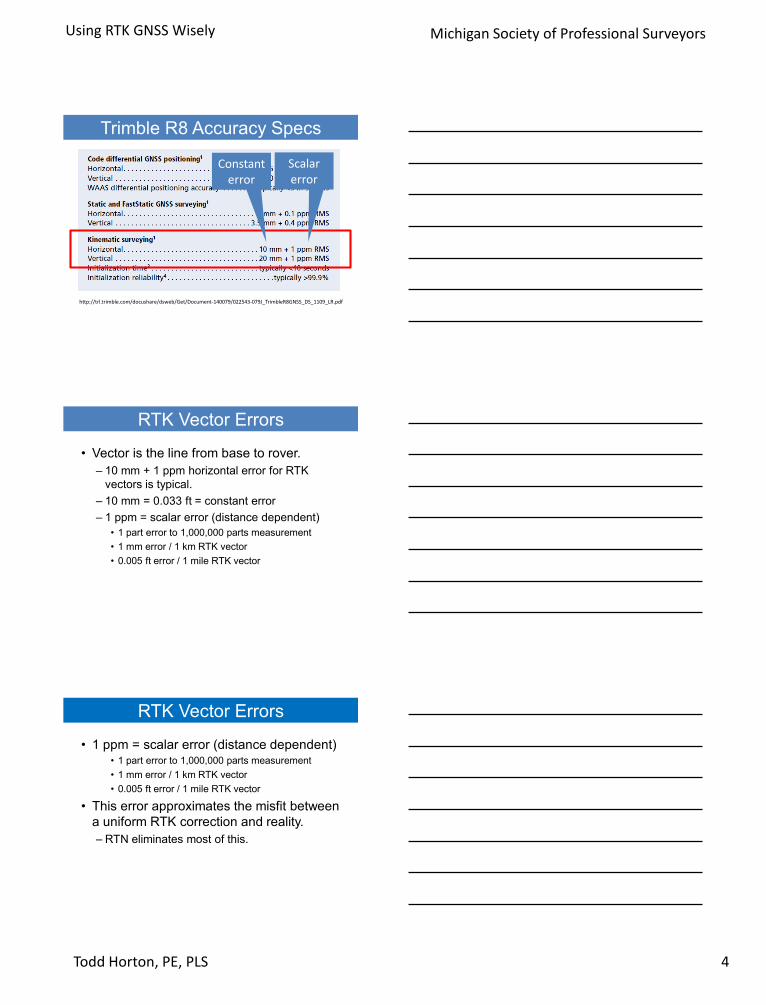
Trimble R8 Accuracy Specs
http://trl.trimble.com/docushare/dsweb/Get/Document-140079/022543-079J_TrimbleR8GNSS_DS_1109_LR.pdf
Constant error
Scalar error
RTK Vector Errors
• Vector is the line from base to rover.
– 10 mm + 1 ppm horizontal error for RTK
vectors is typical.
– 10 mm = 0.033 ft = constant error
– 1 ppm = scalar error (distance dependent)
• 1 part error to 1,000,000 parts measurement
• 1 mm error / 1 km RTK vector
• 0.005 ft error / 1 mile RTK vector
RTK Vector Errors
• 1 ppm = scalar error (distance dependent)• 1 part error to 1,000,000 parts measurement
• 1 mm error / 1 km RTK vector
• 0.005 ft error / 1 mile RTK vector
• This error approximates the misfit between
a uniform RTK correction and reality.
– RTN eliminates most of this.

Using RTK GNSS Wisely
5Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
Differential Position Errors
)( 22
scalarconstdist EEE
RTK vector(miles)
E const(feet)
E scalar(feet)
E dist(feet)
1 0.033 0.005 0.033
2 0.033 0.011 0.034
4 0.033 0.021 0.039
8 0.033 0.042 0.053
16 0.033 0.084 0.091
32 0.033 0.169 0.172
RTK relative accuracy
Base can occupy a known point or an unknown (assumed) point.
Absolute & relative accuracy
• Absolute accuracy
– Accuracy relative to
map surface
• Relative accuracy
– Accuracy relative to
adjacent positions
• Position = coordinate

Using RTK GNSS Wisely
6Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
Absolute
accuracy = ±0.07’
A: known B: unknown
Absolute
accuracy = ±0.05’
Absolute
accuracy = ±5’
Absolute & relative accuracy
A: known B: unknown
Relative accuracy = ±0.05’
Absolute
accuracy = ±5’
Relative accuracy = ±0.05’
Poor absolute accuracy
Good relative accuracy
Good absolute accuracy
Good relative accuracy
C Continuously
O Operating
R Reference
S Stations
• CORS is a permanently mounted survey-grade GPS
receiver which broadcasts RTK corrections.
• Each CORS collects GPS data 24 hours per day, 7 days
per week, 365 days per year.
• Stored data from each CORS is available for download
to enable survey post-processing.
Continuously Operating Reference Stations
• The CORS network is
the anchor of our
National Spatial
Reference System.
– Much higher accuracy
than first order
monuments.
– Actively monitored.
– Tracks crustal motion.
– Data is used for research.
Using RTK GNSS Wisely
7Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
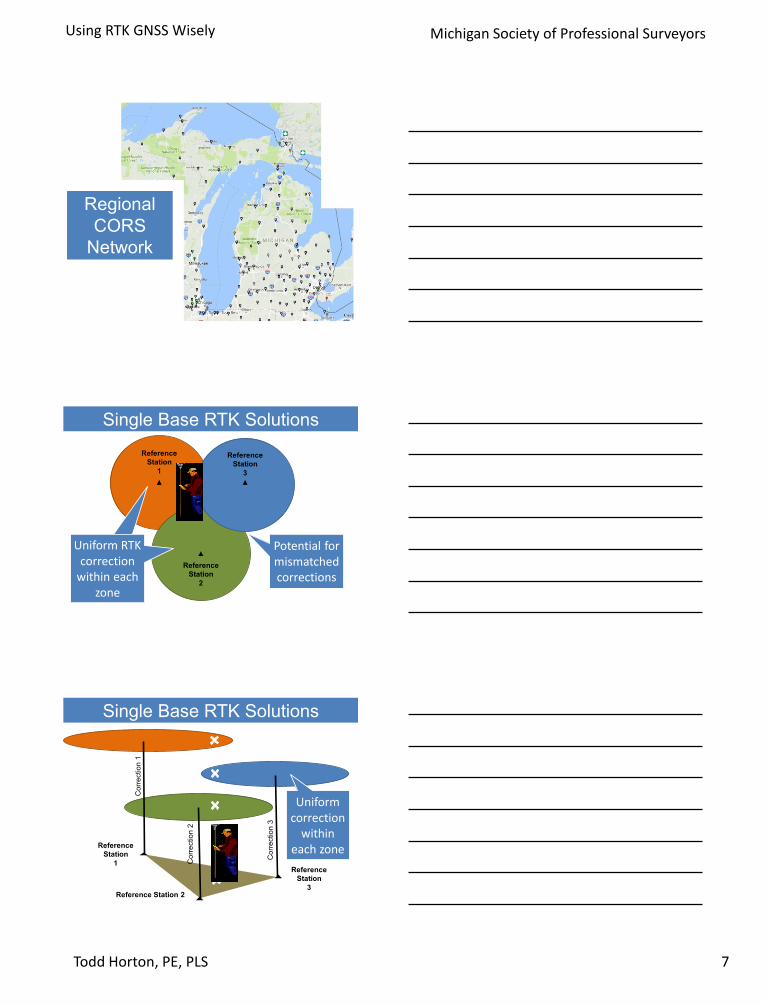
Regional
CORS
Network
Single Base RTK Solutions
Uniform RTK correction
within each zone
Uniform RTK correction
within each zone
Potential for mismatched corrections
Reference
Station
3
Reference
Station
2
Reference
Station
1
Single Base RTK Solutions
Co
rre
ctio
n 1
Co
rre
ctio
n 2
Co
rre
ctio
n 3
Reference
Station
3Reference Station 2
Reference
Station
1
Uniform correction
within each zone
Using RTK GNSS Wisely
8Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
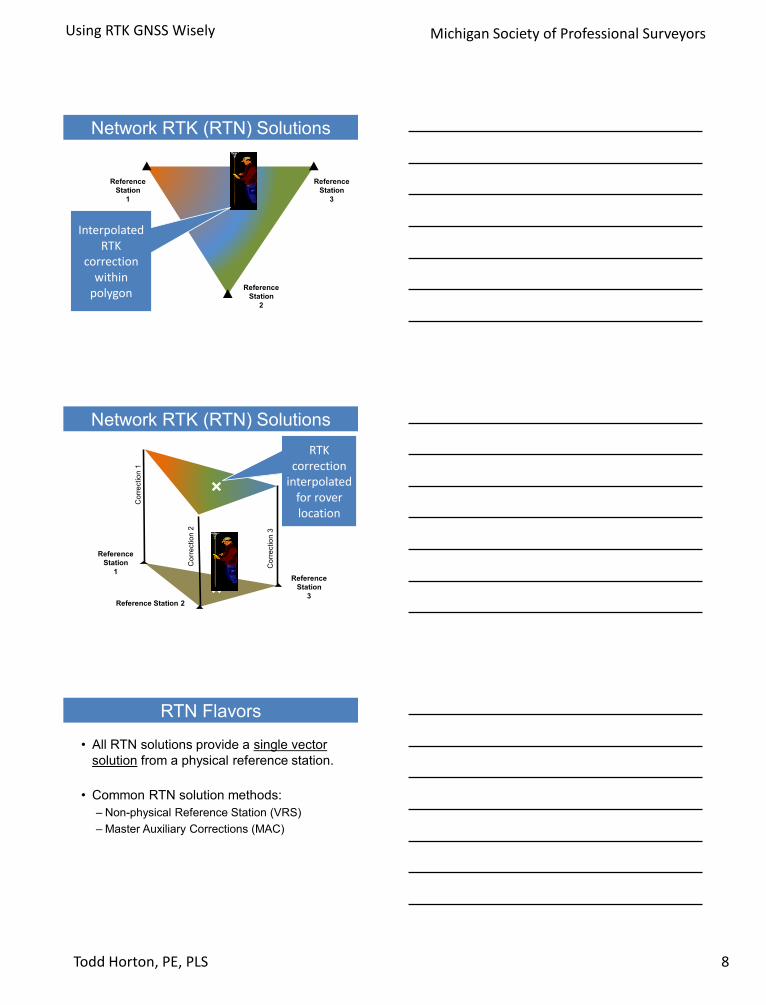
Network RTK (RTN) Solutions
Interpolated RTK
correction within
polygon
Reference
Station
3
Reference
Station
2
Reference
Station
1
Network RTK (RTN) Solutions
Co
rre
ctio
n 1
Co
rre
ctio
n 2
Co
rre
ctio
n 3
Reference
Station
3Reference Station 2
Reference
Station
1
RTK correction
interpolated for rover location
RTN Flavors
• All RTN solutions provide a single vector
solution from a physical reference station.
• Common RTN solution methods:
– Non-physical Reference Station (VRS)
– Master Auxiliary Corrections (MAC)

Using RTK GNSS Wisely
9Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
RTN Solution
1. Data from the reference stations streams to the processing and control center.
2. The RTK rover sends its approximate position.
3. The processing center selects reference stations forming a polygon around the rover.
4. The processing center transmits correction data to the rover.
Master Auxiliary Corrections (MAC)
Rover
position
Correction
data
Streaming GPS data
Auxiliary
Master Auxiliary
Master Auxiliary Corrections (MAC)
Streaming GPS data
Rover computes vector from nearest reference
station.
Master
Auxiliary Auxiliary
Using RTK GNSS Wisely
10Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
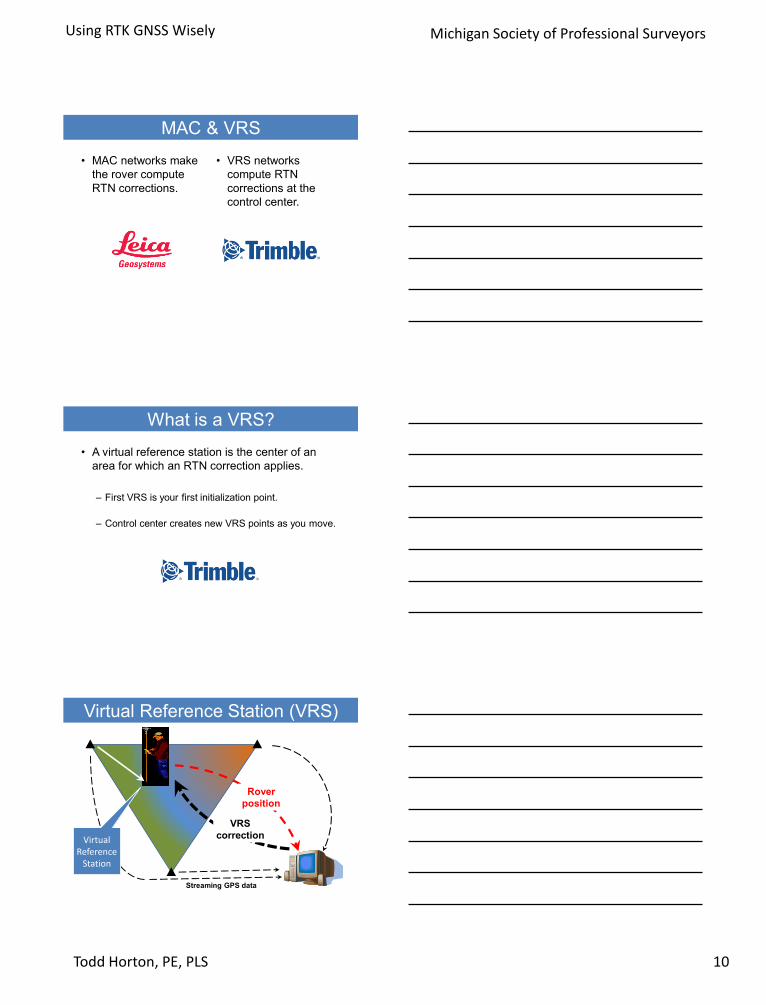
MAC & VRS
• MAC networks make
the rover compute
RTN corrections.
• VRS networks
compute RTN
corrections at the
control center.
What is a VRS?
• A virtual reference station is the center of an
area for which an RTN correction applies.
– First VRS is your first initialization point.
– Control center creates new VRS points as you move.
Virtual Reference Station (VRS)
Rover
position
VRS
correction
Streaming GPS data
Virtual Reference
Station
Using RTK GNSS Wisely
11Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
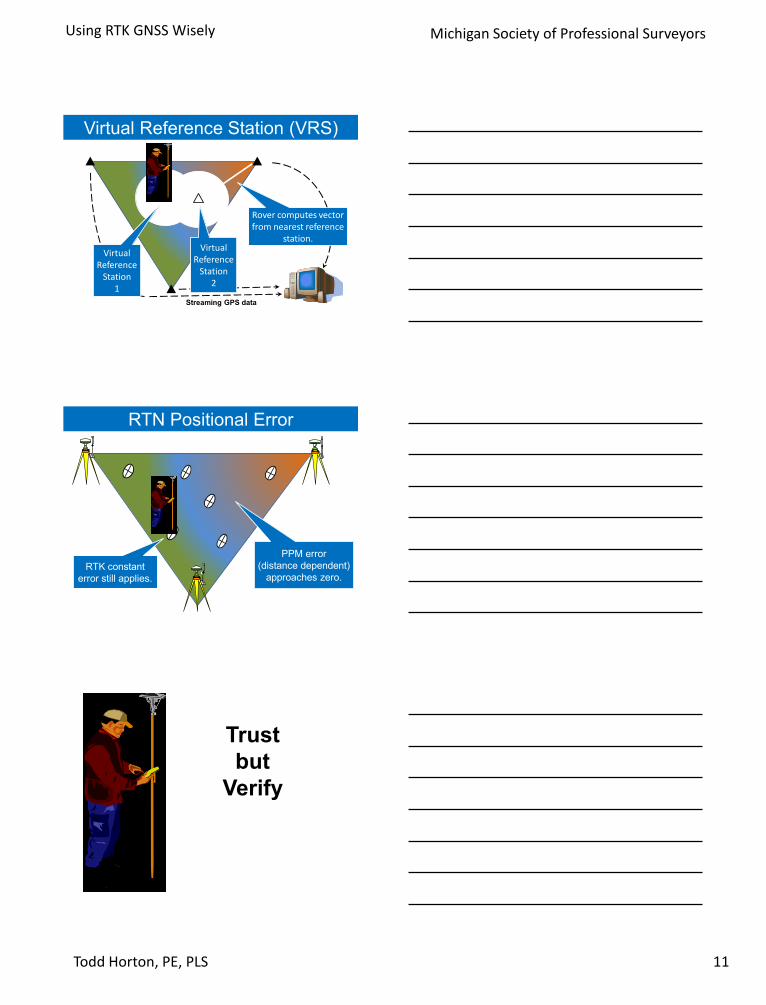
Virtual Reference Station (VRS)
Streaming GPS data
Rover computes vector from nearest reference
station.
Virtual Reference
Station1
Virtual Reference
Station 2
RTN Positional Error
RTK constant
error still applies.
PPM error
(distance dependent)
approaches zero.
Trust
but
Verify
Using RTK GNSS Wisely
12Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
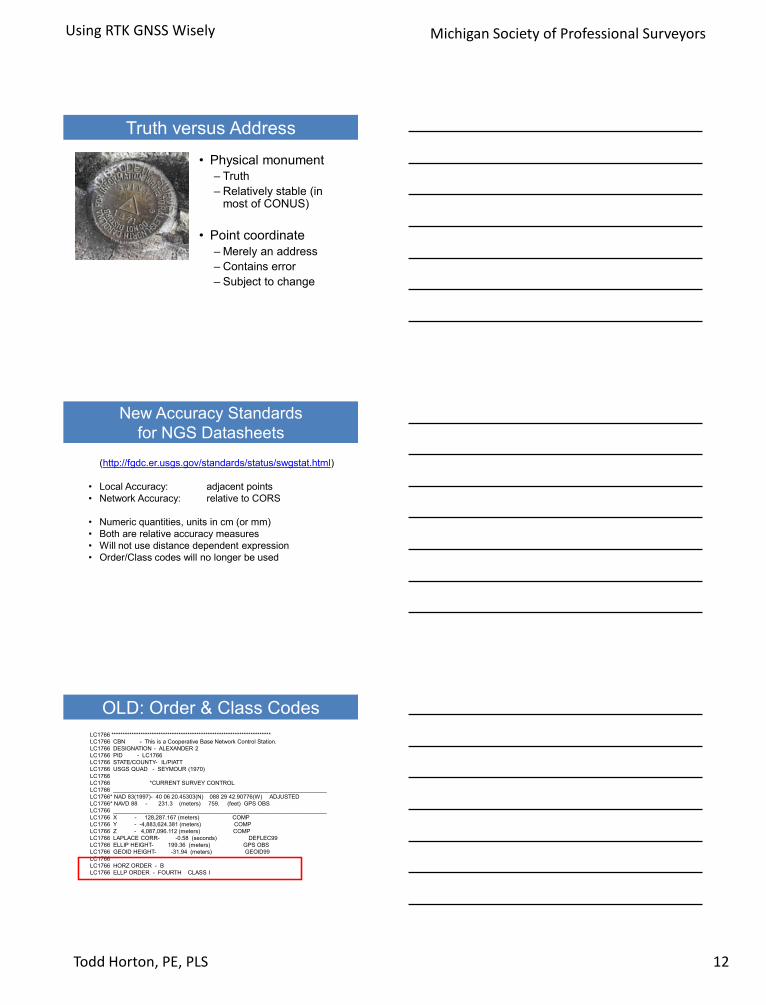
Truth versus Address
• Physical monument
– Truth
– Relatively stable (in most of CONUS)
• Point coordinate
– Merely an address
– Contains error
– Subject to change
New Accuracy Standards
for NGS Datasheets
(http://fgdc.er.usgs.gov/standards/status/swgstat.html)
• Local Accuracy: adjacent points
• Network Accuracy: relative to CORS
• Numeric quantities, units in cm (or mm)
• Both are relative accuracy measures
• Will not use distance dependent expression
• Order/Class codes will no longer be used
OLD: Order & Class Codes
LC1766 ***********************************************************************
LC1766 CBN - This is a Cooperative Base Network Control Station.
LC1766 DESIGNATION - ALEXANDER 2
LC1766 PID - LC1766
LC1766 STATE/COUNTY- IL/PIATT
LC1766 USGS QUAD - SEYMOUR (1970)
LC1766
LC1766 *CURRENT SURVEY CONTROL
LC1766 ___________________________________________________________________
LC1766* NAD 83(1997)- 40 06 20.45303(N) 088 29 42.90776(W) ADJUSTED
LC1766* NAVD 88 - 231.3 (meters) 759. (feet) GPS OBS
LC1766 ___________________________________________________________________
LC1766 X - 128,287.167 (meters) COMP
LC1766 Y - -4,883,624.381 (meters) COMP
LC1766 Z - 4,087,096.112 (meters) COMP
LC1766 LAPLACE CORR- -0.58 (seconds) DEFLEC99
LC1766 ELLIP HEIGHT- 199.36 (meters) GPS OBS
LC1766 GEOID HEIGHT- -31.94 (meters) GEOID99
LC1766
LC1766 HORZ ORDER - B
LC1766 ELLP ORDER - FOURTH CLASS I

Using RTK GNSS Wisely
13Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
NEW: Relative AccuracyLC1766 ***********************************************************************
LC1766 CBN - This is a Cooperative Base Network Control Station.
LC1766 DESIGNATION - ALEXANDER 2
LC1766 PID - LC1766
LC1766 STATE/COUNTY- IL/PIATT
LC1766 COUNTRY - US
LC1766 USGS QUAD - SEYMOUR (1970)
LC1766
LC1766 *CURRENT SURVEY CONTROL
LC1766 ______________________________________________________________________
LC1766* NAD 83(2011) POSITION- 40 06 20.45302(N) 088 29 42.90701(W) ADJUSTED
LC1766* NAD 83(2011) ELLIP HT- 199.346 (meters) (06/27/12) ADJUSTED
LC1766* NAD 83(2011) EPOCH - 2010.00
LC1766* NAVD 88 ORTHO HEIGHT - 231.3 (meters) 759. (feet) GPS OBS
LC1766 ______________________________________________________________________
LC1766
LC1766 FGDC Geospatial Positioning Accuracy Standards (95% confidence, cm)
LC1766 Type Horiz Ellip Dist(km)
LC1766 -------------------------------------------------------------------
LC1766 NETWORK 0.77 2.21
LC1766 -------------------------------------------------------------------
LC1766 MEDIAN LOCAL ACCURACY AND DIST (039 points) 1.00 2.67 69.56
LC1766 -------------------------------------------------------------------
Observed positions and errors
Positions lose their credibility without error estimates.
• 100 distance measurements
• Mean = 2000.00 feet
• Standard deviation = ±0.10 feet
Mean = 2000.00
1999.80
1999.90
2000.20
2000.10

Using RTK GNSS Wisely
14Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
• 100 distance measurements
• Mean = 2000.00 feet
• Standard deviation = ±0.04 feet
Mean = 2000.00
1999.92
1999.96
2000.08
2000.04
Standard Deviation
68%
95%
99%

Using RTK GNSS Wisely
15Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
2D Position Quality
)( 2
2
2
1 EEDRMS
ObservedPosition
(address)
ObservedPosition
(address)
39% confidence
65% confidence
Commonly Known As
)( 2
2
2
1 EEDRMS
ObservedPosition
(address)
• HRMS
– Trimble
– Topcon
• 2DCQ
– Leica

Using RTK GNSS Wisely
16Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
Positional Errors
1000.00 ft calculated
999.94 ft
1000.06 ft
HRMS = 0.03 ftHRMS = 0.03 ft
Effects of Positional Errors
1000.00 ft calculated
Any of these lines
are possible.
HRMS = 0.03 ftHRMS = 0.03 ft
Weakness of GNSS
100.00 ft calculated
99.94 ft
100.06 ft
HRMS = 0.03 ftHRMS = 0.03 ft
Using RTK GNSS Wisely
17Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
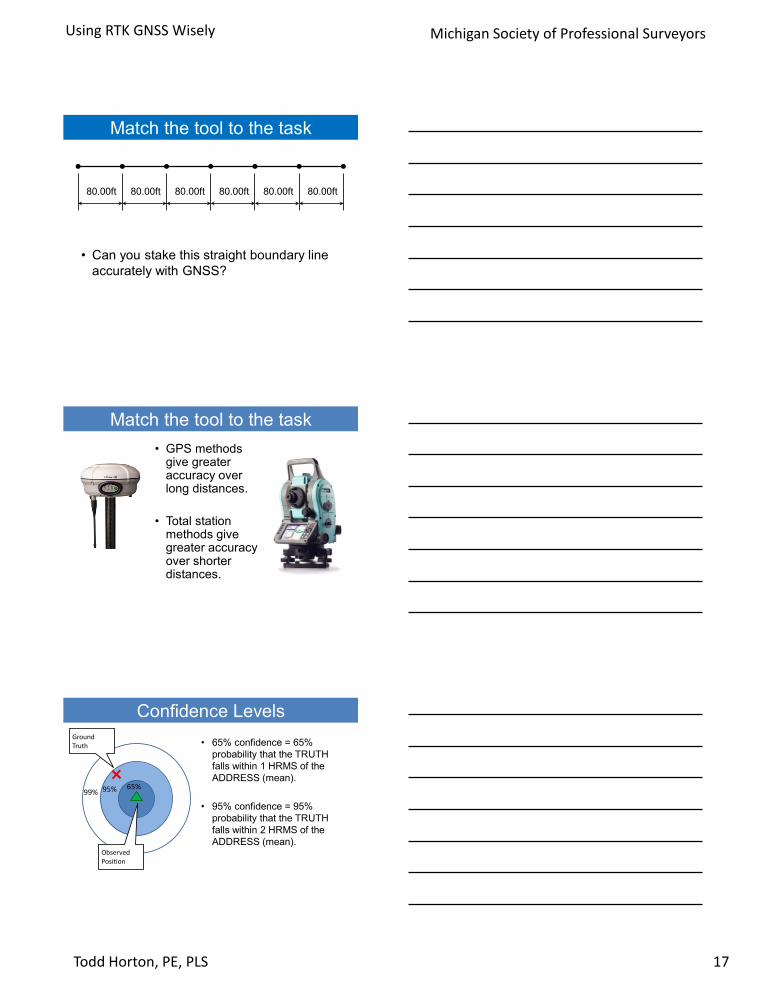
Match the tool to the task
• Can you stake this straight boundary line
accurately with GNSS?
80.00ft 80.00ft 80.00ft 80.00ft 80.00ft 80.00ft
Match the tool to the task
• GPS methods give greater accuracy over long distances.
• Total station methods give greater accuracy over shorter distances.
Confidence Levels
Observed Position
GroundTruth
65%95%99%
• 65% confidence = 65%
probability that the TRUTH
falls within 1 HRMS of the
ADDRESS (mean).
• 95% confidence = 95%
probability that the TRUTH
falls within 2 HRMS of the
ADDRESS (mean).

Using RTK GNSS Wisely
18Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
Reported Precision
Displayed at
data collector
Specified in contracts
Reported in NGS
datasheets
Reported in OPUS
solutions
Comparing Results
Previous
Observation
Current
Observation
Difference
Northing 1255110.131 1255110.182 +0.051 ft
Easting 1028009.036 1028008.987 -0.049 ft
HRMS 0.037 ft 0.040 ft
65% confidence overlap
Published
Coordinate
Observed
Coordinate
Radius =
1 X HRMS

Using RTK GNSS Wisely
19Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
95% confidence overlap
Published
Coordinate
Observed
Coordinate
Radius =
2 X HRMS
Strengthening
Field
Practices
www.trimble.com/GNSSPlanningOnline
DOP is always changing
PDOP < 3 gives best results

Using RTK GNSS Wisely
20Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
Adding Redundancy
• Repeat the observation
with different satellite
geometry.
– Re-measure control
points before, during, and
after survey session.
Satellite geometry changes.
9:00 AM 11:00 AM
Using RTK GNSS Wisely
21Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
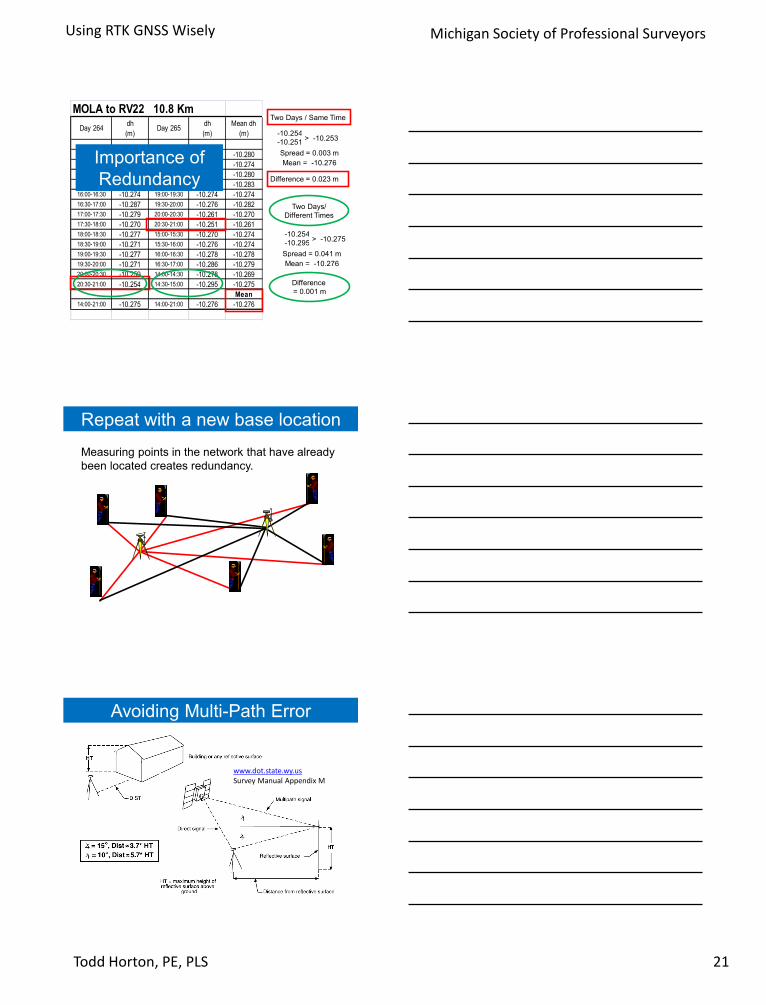
MOLA to RV22 10.8 Km
Day 264dh
(m)Day 265
dh
(m)
Mean dh
(m)
14:00-14:30 -10.281 17:00-17:30 -10.279 -10.280
14:30-15:00 -10.278 17:30-18:00 -10.270 -10.274
15:00-15:30 -10.281 18:00-18:30 -10.278 -10.280
15:30-16:00 -10.291 18:30-19:00 -10.274 -10.283
16:00-16:30 -10.274 19:00-19:30 -10.274 -10.274
16:30-17:00 -10.287 19:30-20:00 -10.276 -10.282
17:00-17:30 -10.279 20:00-20:30 -10.261 -10.270
17:30-18:00 -10.270 20:30-21:00 -10.251 -10.261
18:00-18:30 -10.277 15:00-15:30 -10.270 -10.274
18:30-19:00 -10.271 15:30-16:00 -10.276 -10.274
19:00-19:30 -10.277 16:00-16:30 -10.278 -10.278
19:30-20:00 -10.271 16:30-17:00 -10.286 -10.279
20:00-20:30 -10.259 14:00-14:30 -10.278 -10.269
20:30-21:00 -10.254 14:30-15:00 -10.295 -10.275
Mean
14:00-21:00 -10.275 14:00-21:00 -10.276 -10.276
-10.254
-10.251> -10.253
Spread = 0.003 m
Mean = -10.276
Two Days / Same Time
Difference = 0.023 m
Difference
= 0.001 m
Two Days/
Different Times
-10.254
-10.295> -10.275
Spread = 0.041 m
Mean = -10.276
Importance of
Redundancy
Repeat with a new base location
Measuring points in the network that have already
been located creates redundancy.
www.dot.state.wy.usSurvey Manual Appendix M
Avoiding Multi-Path Error

Using RTK GNSS Wisely
22Todd Horton, PE, PLS
Michigan Society of Professional Surveyors
Avoiding Multi-Path Error
• Set the base at a wide open site.
• Expect multi-path near buildings.
• Chain link fences reflect GPS
signals.
– Mesh openings are too small to
allow signals to pass.
– Set offset points with GPS from
which to measure by other means.
– Raise antenna.
Wrap Up
• What was the most
valuable thing you
learned today?
Contact Information
Todd Horton, PE, PLS
(217) 493-3371 mobile
(217) 373-3785