estimating tree heights and number of stems in young forest stands using airborne laser scanner data
TRANSCRIPT

Estimating tree heights and number of stems in young forest stands
using airborne laser scanner data
Erik Næsseta,*, Kjell-Olav Bjerknesb
aAgricultural University of Norway, Department of Forest Sciences, P.O. Box 5044, N-1432 As, NorwaybCity Council Administration of Enebakk, Norway
Received 20 November 2000; accepted 8 April 2001
Abstract
The mean heights of dominant trees and the stem numbers of 39 plots of 200 m2 each were derived from various canopy height metrics
and canopy density measured by means of a small-footprint airborne laser scanner over young forest stands with tree heights < 6 m. On the
average, the laser transmitted 12,019 pulses ha � 1. Ground-truth values were regressed against laser-derived canopy height metrics and
density. The regressions explained 83% and 42% of the variability in ground-truth mean height and stem number, respectively. Cross-
validation of the regressions revealed standard deviations of the differences between predicted and ground-truth values of mean height and
stem number of 0.57 m (15%) and 1209 ha� 1 (28.8%), respectively. A proposed practical two-stage procedure for prediction of mean height
of dominant trees in forest stands was tested. One hundred and seventy-four sample plots were distributed systematically throughout a 1000-
ha forest area. Twenty-nine of the plots were sited in young stands with tree heights < 11.5 m. In the first stage, mean height of dominant
trees of the 29 plots were regressed against laser-derived canopy height metrics and density. In the second stage, the selected regression was
used to predict mean height of 12 selected test stands. The prediction revealed a bias of 0.23 m (3.5%) (P > .05) and a standard deviation of
the differences between predicted and ground-truth mean height of 0.56 m (8.4%). D 2001 Elsevier Science Inc. All rights reserved.
1. Introduction
In order to reduce the expenses of forest management
planning in Norway, remote sensing techniques have
become an integral part of the forest inventories. For more
than about 50% of the area inventoried annually, the forest
and tree characteristics required in the planning process are
derived by aerial photo interpretation (Næsset, Skramo, &
Tomter, 1992). In Norway, forest management planning of
individual forest holdings is usually carried out according to
an area-based approach (Anon., 1995), which implies that
the individual forest stands are the basic units of the
inventories and the plans.
However, in young stands with tree heights less than, say,
8–10 m, practical experiences have shown that determina-
tion of important stand characteristics by photo interpreta-
tion and photogrammetric methods is difficult and often
inaccurate (Næsset, 2001b). Such characteristics have there-
fore either been recorded by expensive field inventories or
omitted from the surveys. Two of the most important
characteristics for forest management planning in young
stands are the mean height of the dominant trees and number
of stems per hectare. They are both key inventory attributes
in growth projections, whereas the number of stems also
indicates the need for active treatments in the near future,
such as reduction of stem number by tending if the density
is too high or additional planting if the number of trees is
too small.
During the last 10–15 years, several experiments have
been carried out in order to determine various tree height
metrics and stem number by different airborne laser
profiling and scanning systems (e.g., Lefsky, Cohen,
et al., 1999; Magnussen & Boudewyn, 1998; Means
et al., 1999, 2000; Næsset, 1997a; Nelson, Krabill, &
Tonelli, 1988). So far, estimation of forest stand character-
istics from airborne laser scanner data has focused mostly
on old forest stands or forests where the mean tree height
exceeds about 15 m. At least in such forests, small-scale
trials have revealed that both small-footprint (Magnussen
& Boudewyn, 1998; Magnussen, Eggermont, & LaRiccia,
1999; Means et al., 2000; Næsset, 1997a) and large-foot-
print lasers (Lefsky, Cohen, et al., 1999; Means et al.,
0034-4257/01/$ – see front matter D 2001 Elsevier Science Inc. All rights reserved.
PII: S0034 -4257 (01 )00228 -0
* Corresponding author. Tel.: +47-64948906; fax: +47-64948890.
E-mail address: [email protected] (E. Næsset).
www.elsevier.com/locate/rse
Remote Sensing of Environment 78 (2001) 328–340

1999) may produce quite accurate estimates of tree or
canopy height and stem number.
In forest management planning in Norway, the typical
size of a stand is 1.5 ha. For such small units, it is important
that the stand boundaries are accurately located to avoid
serious errors in stand attributes that are estimated on a per-
unit area basis, such as timber volume and stem number
(Næsset, 1999b). Large-footprint laser scanners with foot-
print diameters of 10–25 m may therefore be inappropriate
for detailed area-based forest inventories. Large-footprint
systems are at present not available commercially (Means
et al., 1999), whereas small-footprint systems with footprint
diameters of, say, 10–30 cm are becoming widely available
and operated by a large number of firms (Baltsavias, 1999).
The typical horizontal accuracy on the ground of each laser
pulse of 20–30 cm for small-footprint systems (Baltsavias,
1999) seems to meet the accuracy requirements of detailed
stand inventories.
The lasers are pulsed systems that transmit a laser
pulse and determine the distance to the surface (the tree
canopy or the ground) according to the time taken for the
pulse to travel back to the sensor. A pulse may pass
vertically through a forest canopy, and there may be
several secondary returns as the light from a single pulse
is reflected from within canopy layers of vegetation.
Small-footprint systems usually record either the first or
the last return, or both the first and last returns. The
scanning device provides a large distribution of samples
from across the flight line and would thus be appropriate
for large-scale inventories. Commercial systems currently
available may also produce quite dense samples of meas-
urements with an average spacing on the ground of, for
example, 1.5 m. In this study, we used a small-footprint
scanning laser with the ability to record both the first and
last returns.
In dense forests, only a small portion of the pulses will
penetrate the foliage and hit the ground. The average height
derived from the laser pulses will therefore be larger in
dense stands than in stands with more scattered trees. Thus,
at least in forest stands with trees of a certain height, the
density will affect the relationship between the heights
derived from the laser data and the true tree heights (e.g.,
Næsset, 1997a). Furthermore, the crown shape affects laser
measurements of height (Nelson, 1997). Since different tree
species often develop different crown shapes, it is likely that
the relationship between the heights derived from the laser
data and the true tree heights will differ between species as
well. Finally, height metrics derived from laser data have
been shown to be correlated with stem number (Lefsky,
Cohen, et al., 1999). The objective of the current study was
to assess the accuracy of (1) mean height of the dominant
trees and (2) number of stems per hectare derived from
airborne laser scanner data of a commercially operated
small-footprint system in young forest stands. The effects
on the accuracy of different tree species and densities were
also assessed.
Recently, various sampling procedures in which stands
of an entire forest could be mapped from laser data using
small field samples have been proposed (Means et al.,
2000; Næsset, 1997b), and it is advocated that there is a
large potential for savings as compared to conventional
methods (Means et al., 2000). In practical forest manage-
ment inventories in Norway, all stands of most forest
properties in a municipality are surveyed, and a sample
plot inventory that covers the entire municipality is often
carried out. Such plot inventories typically comprise an
area of 50–500 km2 and often consist of more than 1000
sample plots. In practical applications of laser scanner data,
small georeferenced sample plots could be used to build
empirical relationships between various metrics derived
from the laser data and tree heights measured in field.
These relationships could finally be used to provide corre-
sponding estimates of tree height from the laser data for
every stand in the forest area in question. In the current
study, the performance of such a two-stage application in
young stands was evaluated.
2. Materials and methods
2.1. Study area and stand delineation
A forest area in the municipality of Valer (59�300N10�550E, 70–120 m a.s.l.), southeast Norway, of about
1000 ha was selected for the trial. The main tree species
in the area were Norway spruce (Picea abies (L.) Karst.) and
Scots pine (Pinus sylvestris L.).
As part of a large-scale practical forest inventory going
on in the district, aerial photographs were acquired on the
13th of May 1996. The stand boundaries of all forest stands
in the study area were delineated by means of stereoscopic
photo interpretation and the boundary coordinates were
stored in digital format. The stands were classified accord-
ing to criteria such as age class, site quality, and tree species.
The photo interpretation was accomplished using a Wild B8
stereoplotter equipped with linear encoders. The stereo
models were referenced to the terrain by means of elevation
points and terrain details of the analog official Economic
Map Series. The root mean square error (RMSE) of the
planimetric coordinates (x and y) of the Economic Map
Series is 2 m. The RMSE of the planimetric coordinates
after absolute orientation was expected to be 1.5–2.0 m.
Thus, the total planimetric RMSE of the coordinates was
approximately 2.5–3.0 m.
2.2. Field data collection
Three different ground-truth datasets were acquired in
this study. The first one consisted of selected plots used to
study the accuracy of dominant tree height and number of
stems of small plots derived from airborne laser scanner
data. These plots were denoted as ‘‘experimental plots.’’
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340 329
The last two datasets were used to test the performance of
the practical two-stage procedure in which dominant tree
heights of entire stands were estimated by means of relation-
ships between laser data and field data derived from a
sample of field plots. The first of these datasets comprised
sample plots distributed systematically throughout the entire
1000-ha study area used to build the relationships. These
plots were denoted as ‘‘sample plots.’’ The last dataset
consisted of selected stands of young forest employed to
test the performance of the proposed procedure. These
stands were denoted as ‘‘test stands.’’
2.2.1. Experimental plots
A total of 39 circular plots with an area of 200 m2 each
were selected subjectively in young forest to represent
different combinations of tree heights, densities, and tree
species mixtures. They were inventoried during June and
July 1999. Each plot was divided into four quadrants of
50 m2 each according to the four cardinal directions in order
to ensure equal representation of all parts of the plot. The
number of stems with height taller than 1.5 m was counted
for each quadrant and tree species, i.e., Norway spruce,
Scots pine, and broad-leaved species. Trees with height
smaller than 1.5 m were excluded from the trial. The
number of stems per plot was calculated as the sum of the
individual tree species and quadrant counts, and it ranged
from 1650 to 7100 ha� 1 (Table 1).
The heights of approximately five trees were measured in
each quadrant. Height poles were used for most of the trees,
but trees that exceeded a height of about 4 m were measured
with a Vertex hypsometer. The trees were selected with
equal probability, and they were sampled as every n-th tree
according to the number of stems per quadrant (N), where
n =N/5, i.e., tree number 1, 1 + n, 1 + 2n, 1 + 3n, 1 + 4n. In
forest management planning in Norway, the mean height of
the 2000 tallest trees per hectare is often used as a measure
of dominant tree height in young stands (Eid, 1993). Based
on the measured tree heights and the counted number of
stems in each quadrant, the dominant height of each plot
was computed to conform to this definition. A total of 841
tree heights were measured on the 39 plots. The mean
dominant height of the 39 plots ranged from 1.76 to
6.01 m with an average of 3.80 m (Table 1).
Differential GPS was used to determine the position of
the centre of each experimental plot. Two different receivers
were used in the forest during the field work, i.e., a
Magellan ProMark X-CM 10-channel receiver and a Javad
Legacy 20-channel receiver. The first is a single-frequency
receiver observing C/A code and L1 carrier phase of GPS.
The latter is a dual-frequency receiver observing dual-
frequency pseudorange and carrier phase of both GPS and
GLONASS. Three different receivers were used as base
station for differential correction, i.e., a Magellan ProMark
X-CM receiver, a Javad Legacy receiver, and an Ashtech
Super C/A 12-channel single-frequency receiver. The dis-
tance between the plots and the base stations ranged from
2.8 to 18.7 km. The observation period at each plot was at
least 15 min and a 2-s logging rate was used. The antenna
height was approximately 4 m, which implies that the
antenna was placed above the tree canopy for most of the
plots. Coordinates were computed by postprocessing in an
adjustment with coordinates and carrier phase ambiguities
as unknown parameters using both pseudorange and carrier
phase observations (float solution). The MSTAR (Anon.,
1997) and Pinnacle version 1.00 (Anon., 1999) postprocess-
ing software packages were used. Even for the plots with the
highest trees, it is likely that the accuracy of the planimetric
coordinates (x and y) was better than 0.2–0.3 m (Jonsson,
1999; Næsset, 2001a).
2.2.2. Sample plots
A total of 174 sample plots were distributed systemati-
cally throughout the entire 1000-ha study area according to
a regular grid. Twenty-nine of these plots were classified as
young forest according to the preliminary photo interpreta-
tion, and they were used in this study.
Ground-truth data of the 29 sample plots were collected
during summer and autumn 1998. Each of the 29 plots
consisted of a cluster of four subplots to ensure equal
representation of all parts of the plot. A square with size
7.21� 7.21 m was defined with the centre of the square
being the major plot centre. The corners of the square were
used as centres of four circular subplots of 40 m2 each. Each
subplot was divided into four quadrants of 10 m2 each, and
the two tallest trees in the first quadrant of each subplot
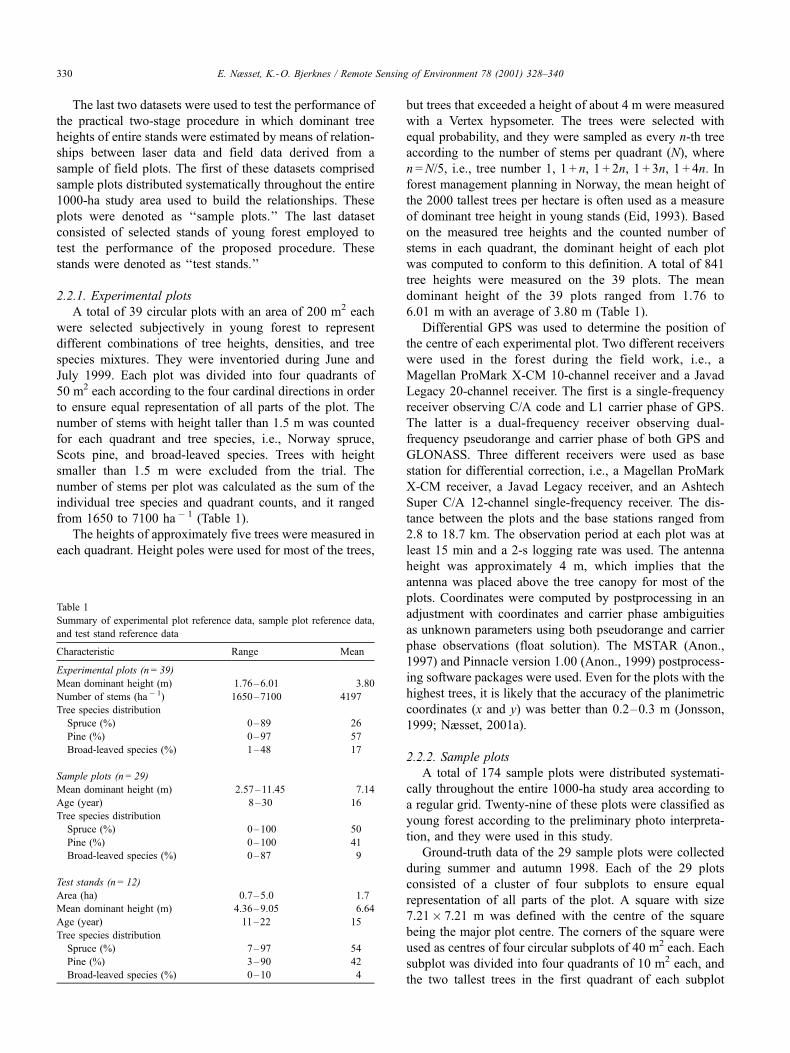
Table 1
Summary of experimental plot reference data, sample plot reference data,
and test stand reference data
Characteristic Range Mean
Experimental plots (n = 39)
Mean dominant height (m) 1.76–6.01 3.80
Number of stems (ha� 1) 1650–7100 4197
Tree species distribution
Spruce (%) 0–89 26
Pine (%) 0–97 57
Broad-leaved species (%) 1–48 17
Sample plots (n = 29)
Mean dominant height (m) 2.57–11.45 7.14
Age (year) 8–30 16
Tree species distribution
Spruce (%) 0–100 50
Pine (%) 0–100 41
Broad-leaved species (%) 0–87 9
Test stands (n = 12)
Area (ha) 0.7–5.0 1.7
Mean dominant height (m) 4.36–9.05 6.64
Age (year) 11–22 15
Tree species distribution
Spruce (%) 7–97 54
Pine (%) 3–90 42
Broad-leaved species (%) 0–10 4
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340330

were identified. The height of the first of these trees selected
clockwise in each subplot was measured. If the first quad-
rant did not contain any trees, the second quadrant was
sampled. Height poles and a Vertex hypsometer were used
for the height measurements. The arithmetic mean of the
measured heights of the four subplots was computed, which
is in accordance with the definition of dominant height, i.e.,
the mean height of the 2000 tallest trees per hectare. To
synchronize these mean dominant height values to the date,
the laser scanner data were acquired, the individual plot
heights were prorated by up to 1 year. The prorating was
done via age- and site quality-specific height growth rates
(Braastad, 1975, 1980). The prorated mean heights were
used as ground-truth. The mean dominant height ranged
from 2.57 to 11.45 m (Table 1).
The tree species of the two tallest trees in each quadrant
of the four subplots was recorded. The age of these trees
was assessed subjectively. The mean age of the 29 plots was
16 years (Table 1), and more than 90% of the trees were
spruce and pine.
Differential GPS was used to determine the position of
the centre of each major plot. An Ashtech Super C/A 12-
channel single-frequency receiver observing C/A code and
L1 carrier phase was used. Observations were carried out for
about 15 min with a 2-s logging rate. Postprocessing using
another Ashtech Super C/A receiver as base station was
carried out with the PNAV program (Anon., 1994) of the
Prism Precise GPS Survey Software. Coordinates were
computed in an adjustment with coordinates and carrier
phase ambiguities as unknown parameters using both pseu-
dorange and carrier phase observations. The height of the
antenna used for the rover receiver was approximately 4 m.
Considering the small tree heights and the small amount of
stem volume in young stands, it is likely that the average
accuracy of the computed planimetric coordinates (x and y)
was better than 0.5 m (Næsset, 1999c).
2.2.3. Test stands
The study comprised a total of 12 test stands. They were
selected subjectively among the stands delineated by photo
interpretation to represent different tree heights in young
stands. The stands were selected independently of the 29
sample plots.
The ground-truth data of the 12 test stands were col-
lected during summer and autumn 1998. Circular sample
plots with an area of 40 m2 each were distributed system-
atically within each stand according to a regular grid with a
spacing of 20–45 m depending on the stand area. The total
number of plots per stand ranged from 16 to 26 with an
average of 20. The sample plots were divided into four
quadrants of 10 m2 each. The two tallest trees in the first
quadrant were identified, and the height of the first of these
trees selected clockwise was measured. If the first quadrant
did not contain any trees, the second quadrant was
sampled. Height poles were used for most of the trees,
but trees that exceeded a height of about 4 m were
measured with a Vertex hypsometer. The mean dominant
height of each stand was calculated as the arithmetic mean
of the individual plot heights, which is in accordance with
the definition of dominant height, i.e., the mean height of
the 2000 tallest trees per hectare. To synchronize these
mean dominant height values to the date, the laser scanner
data were acquired, the individual stand heights were
prorated by up to 1 year. The prorating procedure described
above was used. The prorated mean heights were used as
ground-truth. The mean dominant height ranged from 4.36
to 9.05 m (Table 1). The standard error of the mean height
ranged from 0.27 to 0.74 m with an average for all stands
of 0.46 m.
The tree species of the two tallest trees in each quadrant
of the plots was recorded. The age of these trees was
assessed subjectively, and the mean stand age was calcu-
lated. The mean age of the 12 test stands was 15 years
(Table 1), and more than 90% of the trees were spruce
and pine.
2.3. Laser scanner data
A Piper PA31-310 aircraft carried the ALTM 1210 laser
scanning system produced by Optech, Canada. The laser
transmits at 1064 nm (near-infrared). The major components
of the ALTM 1210 are the infrared laser, the scanner
transmitting the laser pulse and receiving the first and last
echoes of each pulse, the time interval meter measuring the
elapsed time between transmittance and receipt, the global
positioning system airborne and ground receivers, and the
inertial reference system reporting the aircraft’s roll, pitch,
and heading.
The laser scanner data were acquired on the 8th and 9th
of June 1999. The plane was flown approximately 690 m
above the ground (Table 2) at an average speed of 71 m/s. A
total of 43 flight lines were flown in a cross pattern. First, 19
parallel flight lines with approximately 50% overlap
between adjacent flight lines were flown in one direction.
Finally, 24 parallel flight lines were flown perpendicular to
the first 19 flight lines. Thus, every location in the study
area was covered by laser measurements from four stripes.
The pulse repetition frequency was 10 kHz and the scan
frequency was 21 Hz. Maximum scan angle (off nadir) was
17�, which according to the flying height corresponded to anaverage swath width of about 420 m. However, pulses
transmitted at scan angles that exceeded 14� were excludedfrom the final dataset. The beam divergence of 0.30 mrad
produced a roughly circular spot size on the ground (‘‘foot-
print’’) with a diameter of about 21 cm. The average
distance between footprints on the sample plots and in the
test stands was approximately 0.9 m. First and last returns
were recorded.
After postprocessing, it was found that a few long last
return ranges that exceeded the distance to the ground by up
to 50 m were present in the data. According to the manu-
facturer, these erroneous ranges were caused by a faulty last
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340 331

return sensor. A second flight was therefore carried out on
the 6th of June 2000 to collect last return data only. Flying
height corresponded to that of the first flight, but 14 parallel
flight lines were flown in only one direction.
A complete postprocessing of the first and last pulse
data was undertaken by the operating firm, Fotonor, Nor-
way, by means of the proprietary postprocessing software
supported by Optech. All ranges measured by the laser at
an off nadir angle, i.e., distances to the ground as well as
to the tree canopy, were automatically converted to
vertical distances.
The ranging device was calibrated by Optech. The
operating firm always calibrates the system after installa-
tion in the aircraft. In addition, 30 circular plots were
located on plane road segments distributed throughout the
study area. Their positions were determined by differential
GPS +GLONASS based on accurate dual-frequency carrier
phase observations. Based on this calibration, the com-
puted ranges of the first pulse data acquired in 1999 and
the last pulse data collected in 2000 were reduced by 0.13
and 0.11 m, respectively.
The last return data collected in 2000 were used to model
the ground surface. In forest areas, a large portion of the last
returns of the laser pulses usually represent hits above the
ground, such as tree canopy and bushes. The last return data
were therefore filtered during postprocessing by the operat-
ing firm. In the filtering local maxima assumed to represent
vegetation hits were discarded. A triangulated irregular
network (TIN) was generated from the planimetric coordi-
nates (x and y) and corresponding height values of the
individual terrain ground points retained in the last pulse
dataset. This TIN model of the ground was denoted as the
‘‘digital terrain model’’ (DTM). The ellipsoidic height
accuracy of the DTM was expected to be around 25 cm,
at least in relatively plane parts of the area. Studies of terrain
surfaces in wooded areas based on more scattered laser
datasets than the current and similar filtering procedures
indicate an accuracy of 25–30 cm (Kraus & Pfeifer, 1998;
Opseth, 1996).
The first return data collected in 1999 were used to
derive tree canopy heights. All first return observations
(points) were spatially registered to the DTM according
to their coordinates. Terrain surface height values were
computed for each point by linear interpolation from the
DTM. The relative height of each point was computed as
the difference between the height of the first return and
the terrain surface height. In wooded areas, this relative
height can be considered as the canopy height. In open
areas and in gaps between the trees, this height will be
close to zero and thus represent ground hits. Small
height values may also indicate hits of stones, shrubs,
etc., or actually be ground hits that due to the inaccur-
acies of the DTM and the ellipsoidic first pulse heights
are computed as values greater than zero. According to
previous experiences (Kraus & Pfeifer, 1998; Opseth,
1996) and the manufacturer’s specifications (Baltsavias,
1999), an accuracy of 35–50 cm of the difference
between first pulse heights and DTM heights was
expected. Therefore, observations with a relative height
value < 0.5 m were excluded from the dataset. The
remaining first pulse observations were considered to
be canopy hits. Thus, two datasets were developed from
the laser scanner data: (1) geographically registered data
on canopy height and (2) geographically registered data
on all reflected pulses.
2.4. Georeferencing field and laser data
The laser datasets were spatially registered to the three
ground-truth datasets by means of a geographical informa-
tion system (GIS). The first ground-truth dataset, i.e., the 39
experimental plots were developed in GIS by means of
buffers created around each of the plot centres determined
by GPS. A radius of 7.98 m was used, which corresponded
to circular plots with size 200 m2.
The second ground-truth dataset, i.e., the 29 clustered
sample plots distributed systematically throughout the entire
study area, were constructed by means of buffers around
each major plot centre determined by GPS. A radius of
8.67 m was used, which produced circular plots with size
236 m2. The periphery of these circles were tangent to the
periphery of the four 40 m2 subplots located around each
major plot centre. The spatial position of the third ground-
truth dataset, i.e., the 12 inventoried test stands, were taken
directly from the coordinates derived by the stereoscopic
photo interpretation.
The numbers of transmitted pulses and canopy hits were
calculated for each observation of the three ground-truth
Table 2
Summary of laser scanner and flight data
Mean
flying
height
Mean
footprint
diameterNo. of transmitted pulsesa (ha� 1) No. of canopy hitsa (ha� 1)
Mean rate of
Dataset (m) (cm) Range Mean Range Mean penetrationa (%)
Experimental plots 690 21 10,000–15,856 12,019 1450–10,200 4844 60
Sample plots 689 21 7712–13,729 11,686 3093–12,924 8834 24
Test stands 693 21 11,234–12,274 11,868 6680–11,083 8787 26
a Refers to first pulse data.
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340332

datasets. The number of canopy hits varied significantly
between plots and between stands. The average number of
canopy hits ranged between 4844 and 8834 ha� 1 (Table 2).
The mean rate of penetration, i.e., the percentage of pulses
that hit ground, was 24–60%.
2.5. Estimating dominant height and stem number from
laser data
The experimental plots were used to assess the accuracy
of mean height of dominant trees and of number of stems
per hectare derived from the laser scanner data.
Næsset (1997a) found that the maximum height value
of laser canopy hits for a certain fixed area could be used
to estimate the mean tree height. Later, Magnussen and
Boudewyn (1998) advocated that, for a given crown
shape and a certain plot size, there exist a certain quantile
of the distribution of the canopy heights of a plot that
matches the tree height of interest, e.g., the mean height.
Since crown shape, tree species, and density that affect
the relationship between the distribution of canopy
heights and tree heights will tend to vary between differ-
ent plots, it is probably useful to model mean height of
dominant tree by means of several such quantiles. As a
matter of fact, other variables of the distribution of
canopy heights, such as the mean and median values,
standard deviation divided by the mean (coefficient of
variation), and various quantiles, have been found to be
correlated with mean tree height, dominant height, and
other biophysical properties by others (Lefsky, Harding,
Cohen, Parker, & Shugart, 1999; Magnussen et al., 1999;
Means et al., 1999, 2000; Næsset, 1997a; Nelson, 1997;
Nelson et al., 1988; Nelson, Oderwald, & Gregoire,
1997). Furthermore, since the tree density will affect the
relationship between heights derived from the laser data
and the true tree heights (e.g., Næsset, 1997a), variables
related to canopy density, such as the number of canopy
hits divided by the total number of transmitted pulses,
will be useful in modelling of dominant tree height from
laser scanner data.
Thus, multiple regression analysis was used to develop
models for mean height of dominant trees related to pre-
dictor variables derived from the laser data. Eight predictor
variables were tested: the quantiles corresponding to the: (1)
25, (2) 50 (median), (3) 75, and (4) 90 percentiles of the
height distribution of laser pulses classified as canopy hits,
(5) the maximum value, (6) the mean value, (7) the
coefficient of variation, and (8) the canopy density calcu-
lated as the number of canopy hits divided by the total
number of transmitted pulses.
In the multiple regression analysis, multiplicative models
were estimated as linear regressions in the logarithmic
variables because multiplicative models and/or logarithmic
transformations were found to be suitable for estimation of
mean height and timber volume, which is related to tree
density, by others (Means et al., 2000; Næsset, 1997b). The
multiplicative model was formulated as (Eq. (1)):
h ¼ b0hb125h
b250h
b375h
b490h
b5maxh
b6meanh
b7cvD
b81 ð1Þ
whereas the linear form used in the estimation was
lnh ¼ lnb0 þ b1lnh25 þ b2lnh50 þ b3lnh75 þ b4lnh90
þ b5lnhmax þ b6lnhmean þ b7lnhcv þ b8lnD1 ð2Þwhere h = ground-truth mean height of dominant trees (m);
h25, h50, h75, h90 = the quantiles corresponding to the 25, 50
(median), 75, and 90 percentiles of the laser canopy heights,
respectively (m); hmax =maximum laser canopy height (m);
hmean =mean of the laser canopy heights (m); hcv = coeffi-
cient of variation of the laser canopy heights (%); Dl = laser
canopy density.
Stepwise selection was performed to select variables to
be included in the final model. The 5% significance level
was chosen for variables to stay in the model. The standard
least-squares method was used (Anon., 1989). Since the
objective was to assess the accuracy of the selected regres-
sion in predictions, the selected regression was converted
back to original scale. By conversion of the log-linear
equations to original scale a bias will be introduced (e.g.,
Goldberger, 1968). The selected regression was therefore
converted back to original scale by adding half of the
residual variance to the intercept before conversion (Gold-
berger, 1968).
No independent data were available to assess the accu-
racy of mean dominant tree height determined from the
laser data applying the selected regression model. Cross-
validation was therefore used to assess the accuracy. One of
the 39 experimental plots was removed from the dataset at a
time, and the selected model was fitted to the data from the
38 remaining plots. The mean height of the dominant trees
was then predicted for the removed observation. This
procedure was repeated until predicted values were obtained
for all plots.
Simple linear regression was applied to assess how tree
species and tree density affected the accuracy of mean
height of dominant trees derived from the laser data. The
difference between laser mean height predicted by means of
the developed regression equation and ground-truth mean
height was regressed against the proportion of broad-leaved
tree species and the number of stems according to the
following model:
DIFF ¼ b0 þ b1BLþ b2N ð3Þwhere DIFF = difference between predicted and ground-
truth mean height of dominant trees (m); BL= proportion of
broad-leaved species; N = number of stems (ha � 1).
Multiple regression analysis was used to develop models
for number of stems related to predictor variables derived
from the laser data. Previous studies based on ground data
(e.g., Eid, 2001) and data derived by interpretation of aerial
photographs (e.g., Næsset, 1996) have shown that tree
height and measures of density such as basal area and
crown or canopy density are interrelated with stem number.
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340 333

The eight predictor variables used for modelling of mean
height (see above) were therefore tested, and a similar
multiplicative model was applied. The multiplicative model
was estimated as linear regressions in the logarithmic
variables on the following form:
lnN ¼ lnb0 þ b1lnh25 þ b2lnh50 þ b3lnh75 þ b4lnh90
þ b5lnhmax þ b6lnhmean þ b7lnhcv þ b8lnD1 ð4Þ
Stepwise selection was performed to select variables to
be included in the final model, and cross-validation was
used to assess the accuracy.
Finally, simple linear regression was applied to assess
how tree species and tree height affected the accuracy of
stem number derived from the laser data. This was done by
regressing the difference between laser-derived stem num-
ber and ground-truth stem number against the proportion of
broad-leaved tree species and the mean height of dominant
trees according to the following model:
DIFF ¼ b0 þ b1BLþ b2h ð5Þ
where DIFF = difference between predicted and ground-
truth number of stems (ha � 1); BL= proportion of broad-
leaved species; h =mean height of dominant trees (m).
2.6. Estimating dominant height of entire forest stands
We assessed the accuracy of a practical two-stage pro-
cedure in which dominant tree heights of entire forest stands
were estimated from laser data by means of relationships
between laser data and field data derived from a sample of
systematically distributed field plots. The procedure was
based on the assumption that, for a certain cell size, i.e., a
fixed area, there exist a certain relationship between the tree
height of interest and predictor variables derived from the
height distribution of laser pulses classified as canopy hits
(cf. Magnussen & Boudewyn, 1998; Næsset, 1997a).
A regular grid with cell size corresponding to the plot
size of the sample plots was generated by means of the
GIS. Thus, the individual cell size of the grid was
15.36� 15.36 m (236 m2), and the grid covered the entire
1000-ha study area.
To relate the test stand boundaries and two laser datasets
(first pulse data and all transmitted pulses) to the grid, the
grid was laid over the stand boundary map from the
practical forest inventory and spatially registered to the
laser data.
For each of the 29 sample plots with size 236 m2, the
height distribution of laser pulses classified as canopy hits
were derived. In the first stage, the ground-truth mean
height of the dominant trees on the sample plots (hp) were
related to the eight predictor variables derived from the
distribution of laser canopy heights, including the canopy
density (see above), by a multiplicative regression model.
The multiplicative model was estimated as a linear regres-
sion in the logarithmic variables (Eq. (6)):
lnhp ¼ lnb0 þ b1lnh25 þ b2lnh50 þ b3lnh75 þ b4lnh90
þ b5lnhmax þ b6lnhmean þ b7lnhcv þ b8lnD1 ð6ÞStepwise selection was performed to select variables to
be included in the final model, which after conversion
back to original scale turned out to be of the following
form (see below):
hp ¼ b0hb150h
b2meanD
b31 ð7Þ
In the second stage, the heights of the individual grid cells
of the test stands corresponding to the mean height of
dominant trees were denoted as hc, and they were predicted
from the variables derived from the individual cell distribu-
tions of laser canopy heights (h50c, hmean c, Dlc) and regres-
sion Eq. (7)
hc ¼ b0hb150ch
b2mean cD
b31c ð8Þ
For each test stand, the mean height of dominant trees
was estimated as the arithmetic mean of the individual
predicted cell height values. Grid cells of size < 150 m2
were excluded since the relationship between the ground-
truth heights and the predictor variables derived from the
height distributions were assumed to be valid only for cells
of size 236 m2. The differences between the stand heights
Table 3
Regression coefficients and their standard errors, coefficient of determi-
nation (R2), square root of mean square error (RMSE), coefficient of
variation (CV), and condition number (k) for selected regressions of mean
height of dominant trees (Eq. (2)) and stem number (Eq. (4)) based on the
experimental plots (n= 39)a
Eq. (2) Eq. (4)
Variable Estimate S.E. Estimate S.E.
ln b0 1.406*** 0.211 8.800*** 0.109
ln h90 0.269* 0.111
ln Dl 0.406*** 0.091 0.505*** 0.097
R2 0.830 0.421
RMSE 0.131 0.279
CV (%) 10.16 3.36
k 3.73 1.00
a Level of significance: * < .05; *** < .001. h90 = quantile corresponding
to the 90 percentile of the laser canopy heights (m),Dl = laser canopy density.
Table 4
Differences (D) between predicted and ground-truth values of mean height
of dominant trees and stem number, respectively, and standard deviation for
the differences in cross-validation of the selected regressions in Table 3
based on the experimental plots (n= 39)a
D
Variable Observed mean Range Mean S.D.
h (m) 3.80 � 1.47 to 1.61 0.01 NS 0.57
N (ha� 1) 4197 � 2587 to 2581 30 NS 1209
a Level of significance: NS = not significant (>.05). h=mean height of
dominant trees (m), N= number of stems (ha� 1).
ˆ ˆ ˆ ˆˆ
ˆ ˆ ˆ ˆ ˆ
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340334

estimated according to the applied two-stage procedure and
the ground-truth heights were evaluated.
3. Results
3.1. Dominant height and stem number
First, the mean height of dominant trees of the exper-
imental plots was regressed against the predictor variables
derived from the height distribution of laser pulses classi-
fied as canopy hits. According to the stepwise selection
procedure, the final model comprised the quantile corre-
sponding to the 90 percentile (h90) and the laser canopy
density (Dl). The coefficient of determination (R2) was
.830 (Table 3).
Principal component analysis based on the correlation
matrix was used to assess the presence of collinearity in the
regression analysis. The square root of the largest eigen-
value divided by the smallest eigenvalue (condition number)
was used as a means for suggesting collinearity. The
condition number (k) of 3.73 in Eq. (2) (Table 3) indicated
no serious collinearity problems. A condition number larger
than 30 has been proposed to indicate collinearity (Weis-
berg, 1985).
Cross-validation of the selected model revealed that the
mean difference between predicted and observed mean
dominant height of 0.01 m was far from significant in the
statistical sense (Table 4 and Fig. 1). The standard deviation
for the differences between predicted and observed heights
was 0.57 m. According to the error analysis (Eq. (3)), neither
the proportion of broad-leaved species nor the density, as
expressed by stem number, seemed to have any impact on
the differences between predicted and observed heights
(Table 5). The proportion of broad-leaved species and stem
number explained only 8% (R2=.08) of the variability of the
deviation between predicted and observed heights.
The regression analysis of the number of stems on the
experimental plots revealed that laser canopy density (Dl)
was the only predictor variable that could be related to stem
number. None of the other laser-derived variables were
included in the final model (Eq. (4)) at the 5% level of
significance (Table 3). The coefficient of determination in
the selected model was .421.
According to the cross-validation, the mean difference
between predicted and observed stem number was not
statistically significant (Table 4), but the minimum and
Fig. 1. Scatterplots of observed mean height of dominant trees (left) and observed stem number (right) as functions of mean height and stem number predicted
using cross-validation with regression models estimated from the experimental plots (n= 39 experimental plots).
Table 5
Regression coefficients, P values, and coefficient of determination (R2) for
the differences between predicted and observed mean height of dominant
trees (Eq. (3)) and predicted and observed stem number (Eq. (5)),
respectively, regressed against factors that may affect accuracy of prediction
on the experimental plots (n= 39)a
Eq. (3) Eq. (5)
Variable Estimate P Estimate P
b0 � 0.356 NS .246 � 889.0 NS .242
N 0.00003 NS .566
h 157.3 NS .346
BL 0.0126 NS .093 18.05 NS .284
R2 0.080 0.049
a Level of significance: NS = not significant (>.05). N = number of
stems (ha� 1), h=mean height of dominant trees (m), BL= proportion of
broad-leaved species.
Table 6
Differences (D) between laser-derived and ground-truth values of mean
height of dominant trees, and standard deviation for the differences in the
test stands (n= 12)a
D
Comparison Mean h (m) Range (m) Mean (m) S.D. (m)
h–h 6.64 � 0.67 to 1.10 0.23 NS .56
a Level of significance: NS = not significant (>.05). h= ground-truth
mean height of dominant trees (m), h =mean height of dominant trees
predicted from laser data by the proposed two-stage procedure based on a
sample of field plots (m).
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340 335

maximum differences deviated as much as � 62%
(� 2587 ha� 1) and 61% (2581 ha� 1), respectively, from
the observed ground-truth values (Table 4 and Fig. 1). The
standard deviation of the differences was 28.8%
(1209 ha� 1) of observed mean. The error analysis revealed
that neither the tree height nor the proportion of broad-
leaved species could explain the differences between the
predicted and observed stem number (Table 5).
3.2. Estimated stand heights
The mean height of dominant trees of the 29 clustered
sample plots were regressed against the predictor variables
derived from the laser data. The selected regression equa-
tion was
hp ¼ 6:566h1:60050 h�1:430mean D0:616
1 ð9ÞThe coefficient of determination was .620. The regres-
sion in Eq. (9) was used to predict the height of the
individual grid cells of each of the 12 test stand. The mean
height of each stand estimated from the individual grid cell
predictions was compared to the ground-truth. The mean
difference between laser-derived and ground-truth stand
heights was 0.23 m (Table 6), which was far from
significant. The standard deviation for the differences was
0.56 m. The largest deviation for a single stand was 1.10
m, which corresponds to 16.6% of the observed mean
(Table 6 and Fig. 2).
4. Discussion and conclusions
The results of the current study revealed that the proposed
two-stage procedure for estimation of mean tree heights of
entire stands using a sample of field plots seemed to be very
robust with respect to bias. Although the sample plots used to
estimate the regression equation that related tree heights to
predictor variables derived from the laser data were distrib-
uted independently of the test stands throughout a 1000-ha
area, the mean difference between laser-derived and ground-
truth tree heights of the 12 test stands was as small as 0.23 m
(Table 6). In accordance with Magnussen and Boudewyn
(1998), it is probably essential for a successful removal of
bias that the size of the field sample plots corresponds to the
grid cell size used to predict the tree heights of each stand.
Furthermore, this result may imply that for a certain forest
type, for example, young forest as in the present trial, the
height distributions of laser canopy hits of a unit size of area
at different sites are quite equal. In practical forest invento-
ries, it would therefore be efficient to stratify the area
according to the form of the height distributions. Although
height distributions of individual plots or grid cells have not
been investigated in our study, recent research indicate that,
for example, different age classes will generate distributions
with significantly different forms (e.g., Lefsky, Cohen, et al.,
1999). Commonly used stratification criteria such as age
class and site quality, which is correlated with density, are
therefore probably useful for an efficient stratification of
practical inventories.
The present trial was conducted in an area with small
variations in altitude (70–120 m a.s.l.). The flying height
above the terrain was therefore quite stabile (Table 2), and
thus the ranges of the laser returns were quite constant. In
practical forest inventories in Norway where the altitude
may vary from 100 to 1000 m a.s.l. within relatively short
distances, it may be difficult to keep the flying height above
the terrain constant when an airplane is used as platform.
With variations in laser return ranges, the footprint diameter
will vary accordingly. Increased footprint size tends to
elevate the canopy height inferred from laser data (cf.
Aldred & Bonnor, 1985; Nilsson, 1996). It is therefore
likely that practical applications of the proposed procedure
will benefit from stratification of the forest area according to
flying height above the terrain.
The precision of dominant height determined by means
of the proposed two-stage procedure of 0.56 m for entire
stands (Table 6) coincided seemingly with the precision
revealed by cross-validation of the experimental plots
(0.57 m, Table 4). However, the significant average standard
error of mean ground-truth height of the 12 test stands of
0.46 m may indicate that the true error of the tested practical
procedure is somewhat smaller than 0.5 m and at least
smaller than the error observed on the experimental plots.
This seems reasonable since the laser-derived stand heights
were estimated as a mean value from a sample of several
grid cells (cf. Magnussen & Boudewyn, 1998). Further-
more, the trees in the test stands were about 75% taller than
the trees on the experimental plots (Table 1). It is likely that
the random error increases as the tree heights approach zero
since the height distribution of laser pulses classified as
canopy hits will be more seriously affected by ground hits
erroneously classified as vegetation hits and vice versa than
Fig. 2. Scatterplots of observed stand mean height of dominant trees as a
function of stand mean height of dominant trees predicted using regression
model estimated from the sample plots (n= 12 test stands).
ˆ
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340336

in cases with tall vegetation and tree crowns high above the
ground surface.
The estimated regression equations for dominant height
of the experimental plots and the sample plots explained
83% (Table 3) and 62% (Eq. (9)), respectively, of the
variability in observed heights. These proportions are some-
what smaller than the R2 values of .93–.98 reported for
small-footprint data (Means et al., 2000; Næsset, 1997a) and
the R2 value of .95 found for large-footprint data (Means et
al., 1999). However, the three latter studies comprised
samples of plots and stands with size more than 10 times
greater (>2500 m2) the size of the present sample plots.
Furthermore, the referred trials were mainly dealing with
mature forest with tree heights >15 m, where the laser height
distributions are likely to be less affected by erroneous
classification of hits close to the ground surface. Still, the
precision of dominant height determined for entire stands by
means of the proposed two-stage procedure of approxi-
mately 0.5 m seems to be somewhat higher than what could
be expected in older forest. For forest stands with mean tree
heights in the range between 8 and 24 m, standard devia-
tions for the differences between laser-derived and ground-
truth mean heights of 1.2–1.3 m have been reported
(Næsset, 1997a).
Whether the proposed practical procedure could be a
competitive alternative to existing inventory methods
depends on the total inventory costs and the expected
precision of the estimated tree heights. As far as precision
is concerned, current practice is based on subjective esti-
mation of mean height by field inventories, since photo-
grammetric measurements of tree heights roughly ranging
from 1 to 8 m is difficult. Subjective field estimation of
height is expensive and not very accurate. Standard devia-
tions between subjectively estimated and ground-truth mean
heights of 1.1–1.2 m have been reported (Eid, 1993), which
represents a significantly lower precision than indicated in
our study.
It was somewhat surprising that the coefficient of deter-
mination for the experimental plot regression equation
(R2=.830) was significantly higher than the corresponding
coefficient for the clustered sample plots (R2=.620), taking
into consideration that the plot sizes were almost equal (200
and 236 m2) and that the trees were much taller on the
sample plots. However, the experimental plots were subject
to a much more intensive field sampling effort than the
sample plots. Approximately 25% of all recorded trees were
selected for height measurement on the experimental plots.
The stem number was not recorded on the sample plots, but
assuming an average stem number equal to that of the
experimental plots of 4197 ha� 1 (Table 1), the sampling
rate was only 4%. Thus, the estimated ground-truth mean
height of dominant trees on the sample plots were subject to
a significantly higher sampling error, which will affect the
estimated regression. Assuming that the sampling errors
were uncorrelated with constant variance only the regression
residuals will be affected, which may explain the low
proportion of variability accounted for. However, further
inspection of the 841 individual tree heights measured on
the 39 experimental plots indicate that height measurements
of a fixed number of trees on sample plots in young forest
seriously violate the assumptions of uncorrelated sampling
errors and constant variance of the errors. Thus, the random
errors associated with the field measurements may have
affected the variance estimates of the coefficients in the
regression used to predict stand heights. It is therefore likely
that a more intensive field sampling of the clustered sample
plots could have improved the performance of the practical
procedure used to estimate mean heights of entire stands. A
more intensive sampling effort should be considered in
future applications of the procedure.
Number of stems per hectare was determined from the
laser data over the experimental plots only. The low R2
value (.421) of the estimated regression (Table 3) indicated
that it is much more difficult to derive tree numbers than tree
heights from laser data in very young forest. For large stems
(>100 cm) in mature forest, it has been shown that laser data
may explain most of the variability (R2=.85) in observed
stem number (Lefsky, Cohen, et al., 1999). It is reasonable
that it becomes more difficult to determine stem number as
the tree height decreases. Stem number is highly correlated
with laser canopy density (Dl). As a matter of fact, Dl was
the only predictor variable selected in the final regression
equation for stem number (Table 3). Since the canopy
density in young forest with small tree heights will be very
prone to classification errors of hits close to the ground
surface, dependent variables that are related to density only
will be more difficult to estimate precisely than variables
that are related to height metrics of the laser as well, such as
dominant tree height. Furthermore, for a given number of
trees, the canopy density as estimated from the laser data
may change dramatically as the tree heights approach zero,
which is illustrated by the different penetration rates of the
laser data over the three ground-truth data sets applied in our
study. The mean penetration rates of the sample plots and
the test stands, where the mean tree heights were 7.14 and
6.64 m (Table 1), respectively, were 24% and 26% (Table 2).
Over the experimental plots with a mean height of 3.80 m
(Table 1), the mean rate of penetration was 60%. Thus, the
canopy density dropped from approximately 75%–40% as
the tree height decreased by about 3 m.
Nevertheless, the cross-validation (Table 4) revealed
that unbiased estimates of stem number may be derived
from laser data, which may indicate that stem number of
young forest stands may be calculated by means of the
proposed two-stage procedure. Theprecision of 28.8%
(S.D. = 1209 ha � 1) indicated by the cross-validation
(Table 4) is probably lower than what might be expected
for entire stands, since stand estimates must be based on a
sample of several grid cells (cf. Magnussen & Boudewyn,
1998). If a precision of 28% or higher could be expected in
practical applications, stem number derived from laser data
would be an efficient alternative to current field invento-
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340 337

ries, which are expensive and with a documented precision
of not higher than 22–34% (Eid, 1993).
The ability to predict tree height did not seem to be
affected by the observed stem number and the proportion
of broad-leaved species (Table 5). Neither did errors in
predicted stem number seem to be affected by the true tree
heights and the proportion of broad-leaved species. These
findings may indicate that tree species is not an efficient
criterion for stratification of practical inventories based on
laser data, at least in very young stands. However, it is
likely that more pronounced distinctions between canopy
height distributions derived from laser data for different
tree species will appear as the trees become older and
develop different crown shapes (cf. Nelson, 1997; Nelson
et al., 1988).
The fact that the true number of trees did not affect the
errors in predicted mean height was not surprising since
canopy density was included as predictor variable in the
selected regression (Eq. (2), Table 3). Canopy density and
stem number are intercorrelated variables (Eq. (4), Table 3).
As long as canopy density is made available as candidate
variable in the regression analysis of the proposed two-stage
procedure, further stratification of young forest stands seems
superfluous. Taking the large variability of canopy density
when the tree heights approach zero into account, it was
somewhat surprising that the true tree height did not seem to
affect the errors of predicted stem number. However, the
mean dominant height of the experimental plots ranged
from 1.76 to 6.01 m (Table 1). It is likely that height metrics
derived from laser data will become significant variables in
the prediction of stem number if stands with tree heights
ranging from, say, 1–10 m are pooled into a single stratum.
The applied practical procedure for estimation of mean
tree height of entire stands assumed that the same trees were
observed by the laser and by field measurements. Applica-
tions that utilize corresponding observations of the same
objects on the ground and from the air are sensitive to
positional errors (x and y) for either of the observations. In
many boreal forest types, large variation in important
characteristics such as tree heights and timber volume are
experienced over very short distances. Eid and Fitje (1993)
reported from a study in southeast Norway that mean tree
height of sample plots varied by 11–22% between sample
plots within stands with an average size of 2.1 ha, whereas
Bolduc, Lowell, and Edwards (1999) stated in a Canadian
study that small movements (5–10 m) in any direction had
the potential to place a sample plot in a forest type of
completely different density due to spatial heterogeneity. In
our study, the accuracy of the planimetric coordinates
(x and y) of 25–30 cm on the ground for the laser data
and accuracies of < 0.5 m for the field plot coordinates
computed from GPS and GLONASS observations seem to
ensure a proper correspondence between the two data
sources. It should be noted, however, that the positioning
of the sample plots by GPS probably is the most critical
factor (Bolduc et al., 1999), and that the most relevant
procedures for positioning with GPS and GLONASS under
forest canopies are required (cf. Næsset, 1999c, 2001a;
Næsset et al., 2000).
The indication of a relative robust relationship between
tree heights and laser-derived height distributions for a unit
size of area may extend the applicability of laser data from
small-footprint systems. It has been advocated that small-
diameter beams frequently oversample crown shoulders and
miss the tops of the trees (cf. Dubayah & Drake, 2000), and
that modelling of waveforms which is typified as an
advantage of large-footprint systems, is difficult with
small-footprint systems since they do not record the entire
sequence of reflected energy for individual footprints (Blair
& Hofton, 1999). Using a unit size of area as sampling unit,
it is possible to derive height distributions that have many
properties common to those of waveforms of large foot-
prints. This study has shown that mean height of dominant
trees in young stands can be determined from laser data for
given sampling units assuming that proper calibration is
provided. The proposed two-stage procedure offers such a
calibration. It is likely that maximum tree height for a given
sampling unit can be derived as well. Furthermore, height
distributions derived from small-footprint lasers for a given
sampling unit seem to be proportional to the vertical
distribution of leaf area (Magnussen & Boudewyn, 1998).
Thus, it is likely that the vertical structures of leaf area,
biomass, and vegetation material in general that have been
modelled by means of large-footprint waveforms (Blair &
Hofton, 1999; Lefsky, Cohen, et al., 1999; Weishampel,
Blair, Knox, Dubayah, & Clark, 2000) can be modelled
from small-footprint data as well, although distributions
derived from small-footprint systems will tend to reflect
the outer canopy surface and not the entire canopy (Lefsky,
Harding, et al., 1999). However, further research is required
for empiric verification of this hypothesis.
On the other hand, small-footprint systems have some
attractive properties as compared to large-footprint systems.
In forest areas with abrupt changes in topography and
complex spatial configuration of forest stands, small posi-
tional errors of stand boundaries may seriously affect the
accuracy of characteristics estimated on a per-unit area
basis, e.g., stem number and timber volume per hectare
(Næsset, 1999a, 1999b). It is therefore essential that the
spatial allocation of remotely sensed data can be adjusted
according to a given spatial configuration. With the fine
spatial resolution of small-footprint systems, it is feasible to
define the sampling units in accordance with given bounda-
ries and derive proper laser canopy height distributions
thereafter. The spatial location of a large-footprint wave-
form, however, is fixed.
The present trial has indicated that at least mean tree
heights can be derived from laser data in very young forest
stands with tree heights < 10 m. Furthermore, the proposed
practical stand inventory procedure has proved to yield
unbiased estimates. However, the methodology may be even
more relevant in older and mature forest since the utility in
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340338

monetary terms of reduced inventory costs and improved
precision of attributes characterising the timber resources is
higher in stands that are expected to generate revenues in a
near future than in younger stands where logging is not
expected to take place for some decades. Further large-scale
research should therefore be conducted to test the appli-
cability of the methodology in old and mature forest.
Acknowledgments
This research has been funded by the Borregaard
Research Fund and the Research Council of Norway, and
is a contribution to research project no. 133303/110. We
wish to thank Mr. Jo Heringstad and Mr. Petter Økseter at
the Agricultural University of Norway who carried out some
of the fieldwork. Thanks also to Fotonor, Norway for
collection and processing of the airborne laser scanner data,
and to Fotokart, Norway for accomplishing the photo-
grammetric work.
References
Aldred, A. H., & Bonnor, G. M. (1985). Application of airborne laser to
forest surveys. Information Report PI-X-51, Can. For. Serv., Petawawa
Natl. For. Inst., Chalk River, 62 pp.
Anon. (1989). SAS/STAT User’s guide, version 6, vol. 2 (4th ed., 846 pp.).
Cary, NC: SAS Institute.
Anon. (1994). Ashtech precise differential GPS navigation and surveying
(PNAV-Prism) software user’s guide, revision A. Doc. No. 600248.
Sunnyvale, CA: Ashtech.
Anon. (1995). Skogbruksplanlegging. Veiledning i organisering og gjen-
nomføring av takstarbeidet (Forest management planning: a guide to
forest surveying)(18 pp.) Oslo: The Norwegian Ministry of Agriculture.
Anon. (1997). MSTAR professional GPS software, user’s guide (164 pp.).
San Dimas, CA: Magellan Systems.
Anon. (1999). Pinnacle user’s manual (123 pp.). San Jose, CA: Javad
Positioning Systems.
Baltsavias, E. P. (1999). Airborne laser scanning: existing systems and
firms and other resources. ISPRS Journal of Photogrammetry and
Remote Sensing, 54, 164–198.
Blair, J. B., & Hofton, M. A. (1999). Modelling laser altimeter return
waveforms over complex vegetation using high-resolution elevation
data. Geophysical Research Letters, 26, 2509–2512.
Bolduc, P., Lowell, K., & Edwards, G. (1999). Automated estimation of
localized forest volume from large-scale aerial photographs and ancil-
lary cartographic information in a boreal forest. International Journal of
Remote Sensing, 20, 3611–3624.
Braastad, H. (1975). Yield tables and growth models for Picea abies.
Reports of the Norwegian Institute for Forest Research, 31, 358–537.
Braastad, H. (1980). Growth model computer program for Pinus sylvestris.
Reports of the Norwegian Institute for Forest Research, 35, 265–359.
Dubayah, R. O., & Drake, J. B. (2000). Lidar remote sensing in forestry.
Journal of Forestry, 98 (6), 44–46.
Eid, T. (1993). Control of forest management data for individual stands in
cutting class II. Commun. Skogforsk no. 46.4. Dept. of Forest Sciences,
Agric. Univ. of Norway, As, 39 pp.
Eid, T. (2001). Models for prediction of basal area, mean diameter, and
number of trees for forest stands in southeastern Norway. Scandinavian
Journal of Forest Research, (in press).
Eid, T., & Fitje, A. (1993). Variations within stands for volume, basal area,
number of trees, mean diameter, and mean height. Commun. Skogforsk
no. 46.10. Dept. of Forest Sciences, Agric. Univ. of Norway, As, 44 pp.
Goldberger, A. S. (1968). The interpretation and estimation of Cobb–
Douglas functions. Econometrica, 35, 464–472.
Jonsson, T. (1999). Differentiell GPS-positionering av punkter i skog
med enkel handhallen kod/fas-mottagare (Differential GPS position-
ing of points in forest with a simple hand-held code/carrier phase
receiver)(42 pp.). MS Thesis, Dept. of Forest Sciences, Agric. Univ.
of Norway, As.
Kraus, K., & Pfeifer, N. (1998). Determination of terrain models in wooded
areas with airborne laser scanner data. ISPRS Journal of Photogram-
metry and Remote Sensing, 53, 193–203.
Lefsky, M. A., Cohen, W. B., Acker, S. A., Parker, G. G., Spies, T. A., &
Harding, D. (1999). Lidar remote sensing of the canopy structure and
biophysical properties of Douglas-fir western hemlock forests. Remote
Sensing of Environment, 70, 339–361.
Lefsky, M. A., Harding, D., Cohen, W. B., Parker, G., & Shugart, H. H.
(1999). Surface lidar remote sensing of basal area and biomass in de-
ciduous forests of eastern Maryland, USA. Remote Sensing of Environ-
ment, 67, 83–98.
Magnussen, S., & Boudewyn, P. (1998). Derivations of stand heights from
airborne laser scanner data with canopy-based quantile estimators.
Canadian Journal of Forest Research, 28, 1016–1031.
Magnussen, S., Eggermont, P., & LaRiccia, V. N. (1999). Recovering tree
heights from airborne laser scanner data. Forest Science, 45, 407–422.
Means, J. E., Acker, S. A., Brandon, J. F., Renslow, M., Emerson, L., &
Hendrix, C. J. (2000). Predicting forest stand characteristics with air-
borne scanning lidar. Photogrammetric Engineering and Remote Sens-
ing, 66, 1367–1371.
Means, J. E., Acker, S. A., Harding, D. J., Blair, J. B., Lefsky, M. A.,
Cohen, W. B., Harmon, M. E., & McKee, W. A. (1999). Use of
large-footprint scanning airborne lidar to estimate forest stand character-
istics in the western cascades of Oregon. Remote Sensing of Environ-
ment, 67, 298–308.
Næsset, E. (1996). Determination of number of stems in coniferous forest
stands by means of aerial photo-interpretation. Scandinavian Journal of
Forest Research, 11, 76–84.
Næsset, E. (1997a). Determination of mean tree height of forest stands
using airborne laser scanner data. ISPRS Journal of Photogrammetry
and Remote Sensing, 52, 49–56.
Næsset, E. (1997b). Estimating timber volume of forest stands using air-
borne laser scanner data. Remote Sensing of Environment, 61, 246–253.
Næsset, E. (1999a). Assessing the effect of erroneous placement of forest
stand boundaries on the estimated area of individual stands. Scandina-
vian Journal of Forest Research, 14, 175–181.
Næsset, E. (1999b). Effects of delineation errors in forest stand boundaries
on estimated area and timber volumes. Scandinavian Journal of Forest
Research, 14, 558–566.
Næsset, E. (1999c). Point accuracy of combined pseudorange and carrier
phase differential GPS under forest canopy. Canadian Journal of Forest
Research, 29, 547–553.
Næsset, E. (2001a). Effects of differential single- and dual-frequency GPS
and GLONASS observations on point accuracy under forest canopies.
Photogrammetric Engineering and Remote Sensing, (in press).
Næsset, E. (2001b). Determination of mean tree height of forest stands by
means of digital photogrammetry, in submission.
Næsset, E., Bjerke, T., Øvstedal, O., & Ryan, L. H. (2000). Contributions of
differential GPS and GLONASS observations to point accuracy under
forest canopies. Photogrammetric Engineering and Remote Sensing, 66,
403–407.
Næsset, E., Skramo, G., & Tomter, S. M. (1992). Norske erfaringer med bruk
av flybilder ved skogregistrering (Forest surveying by means of aerial
photographs: the Norwegian experience). In: E. Næsset (Ed.), Skogre-
gistrering og skogbruksplanlegging ( pp. 3–12). As: Dept. of Forest
Sciences, Agric. Univ. of Norway (Aktuelt fra Skogforsk 13-1992).
Nelson, R. (1997). Modelling forest canopy heights: the effects of canopy
shape. Remote Sensing of Environment, 60, 327–334.
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340 339

Nelson, R., Krabill, W., & Tonelli, J. (1988). Estimating forest biomass and
volume using airborne laser data. Remote Sensing of Environment, 24,
247–267.
Nelson, R., Oderwald, R., & Gregoire, G. (1997). Separating the ground
and airborne laser sampling phases to estimate tropical forest basal area,
volume, and biomass. Remote Sensing of Environment, 60, 311–326.
Nilsson, M. (1996). Estimation of tree heights and stand volume using an
airborne lidar system. Remote Sensing of Environment, 56, 1–7.
Opseth, P. E. (1996). Flybaren laserscanning. En test av Optech’s airborne
laser terrain mapping system (Airborne laser scanning. Testing the
Optech airborne laser terrain mapping system)(64 pp.). MS Thesis,
Dept. of Surveying, Agric. Univ. of Norway, As.
Weisberg, S. (1985). Applied linear regression (2nd ed., 324pp.). New
York: Wiley.
Weishampel, J. F., Blair, J. B., Knox, R. G., Dubayah, R., & Clark, D.
B. (2000). Volumetric lidar return patterns from old-growth tropical
rainforest canopy. International Journal of Remote Sensing, 21,
409–415.
E. Næsset, K.-O. Bjerknes / Remote Sensing of Environment 78 (2001) 328–340340