ee 495 modern navigation systems noise & random processes mon, march 02 ee 495 modern navigation...
TRANSCRIPT
EE 495 Modern Navigation Systems
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems Slide 1 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
• We can NOT describe all of the parameters that contribute to a signal or sensor measurement Deterministic: Can exactly model the relationship between
the input (stimulus) and output (sensor meas)
Random: Can NOT exactly model the relationshipo Can characterize attributes of the signal
– e.g., mean (), standard deviation (), probability density function (pdf), power spectral density (PSD), …
o i.e., Noise (random signals)
Slide 2 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
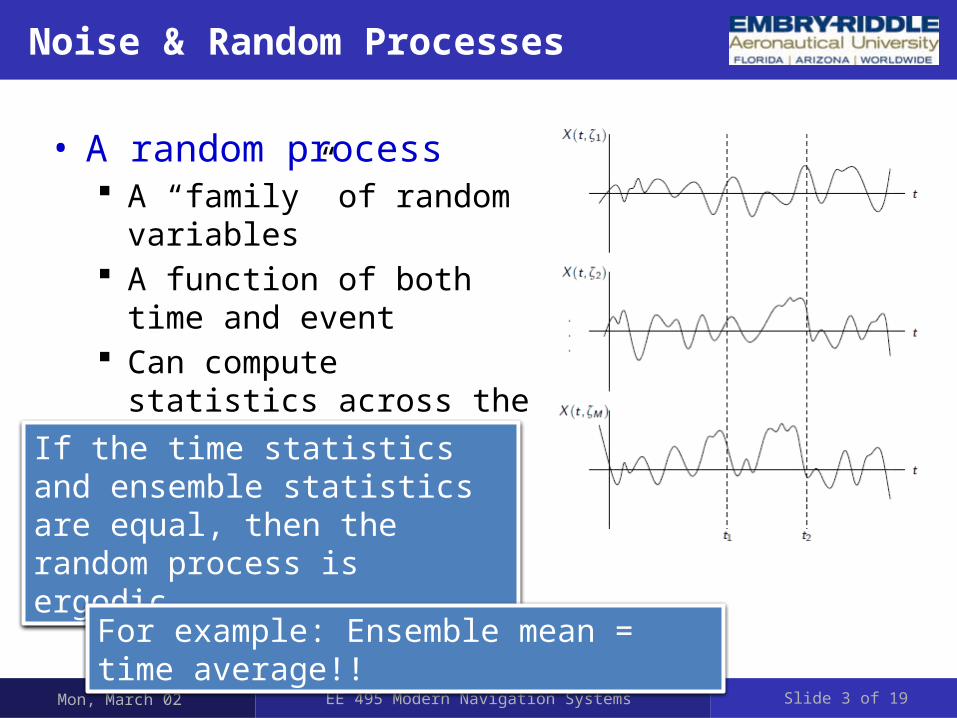
• A random process A “family” of random variables A function of both time and
event Can compute statistics across
the ensemble or across time
If the time statistics and ensemble statistics are equal, then the random process is ergodic.
For example: Ensemble mean = time average!!
Slide 3 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
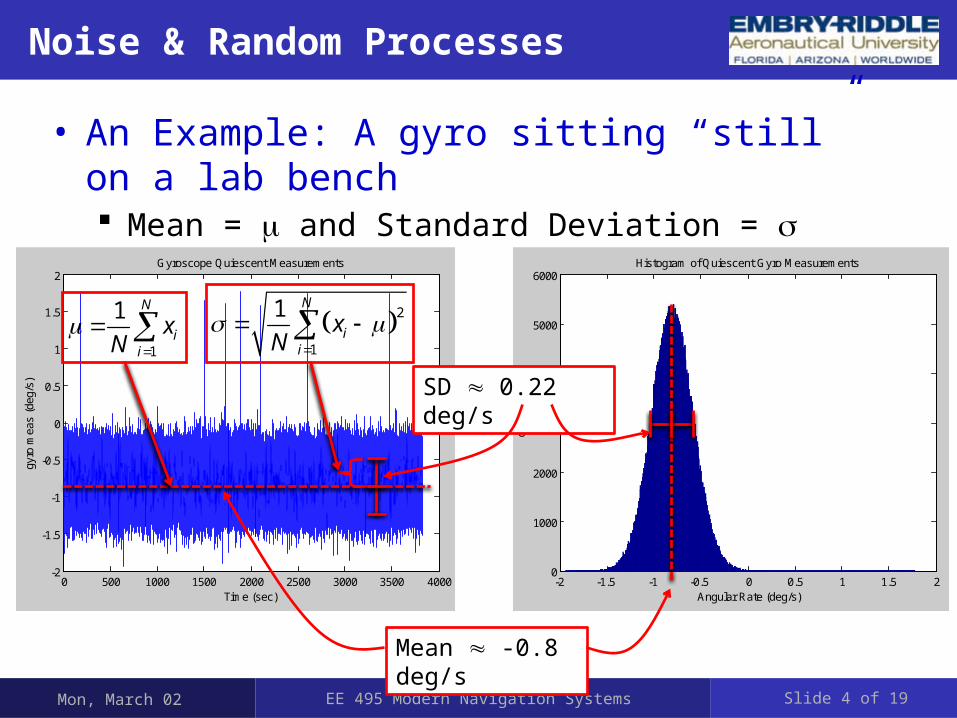
• An Example: A gyro sitting “still” on a lab bench Mean = and Standard Deviation =
0 500 1000 1500 2000 2500 3000 3500 4000-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
gyro
mea
s (d
eg/s
)
Gyroscope Quiescent Measurements
Time (sec)
1
1 N
ii
xN
21
1 N
ii
xN
-2 -1.5 -1 -0.5 0 0.5 1 1.5 20
1000
2000
3000
4000
5000
6000
coun
t
Histogram of Quiescent Gyro Measurements
Angular Rate (deg/s)
Mean -0.8 deg/s
SD 0.22 deg/s
Slide 4 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
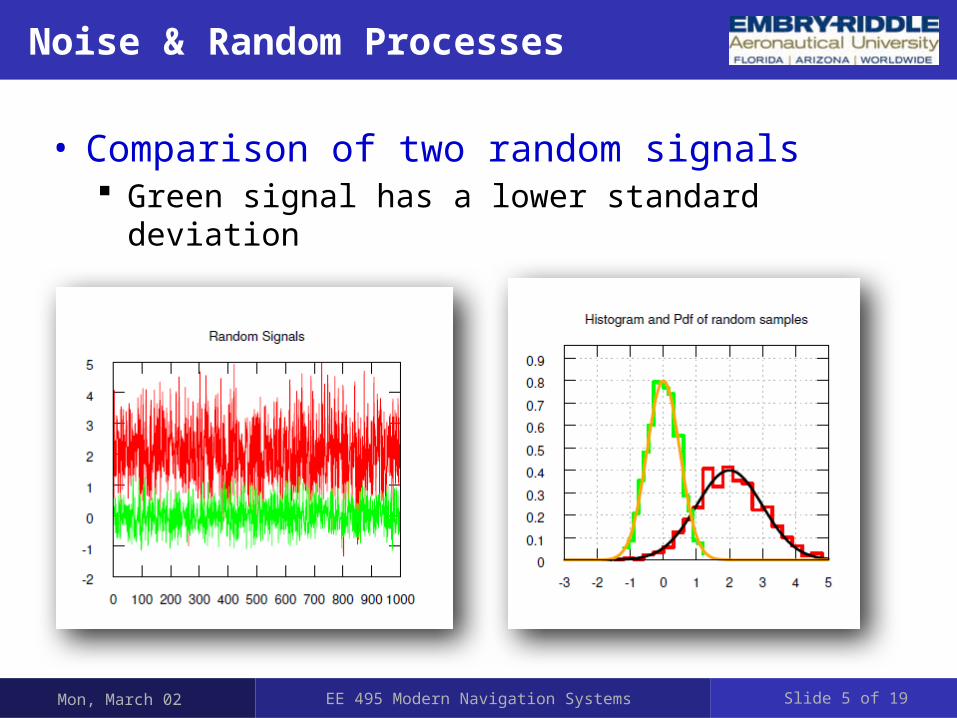
• Comparison of two random signals Green signal has a lower standard deviation
Slide 5 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
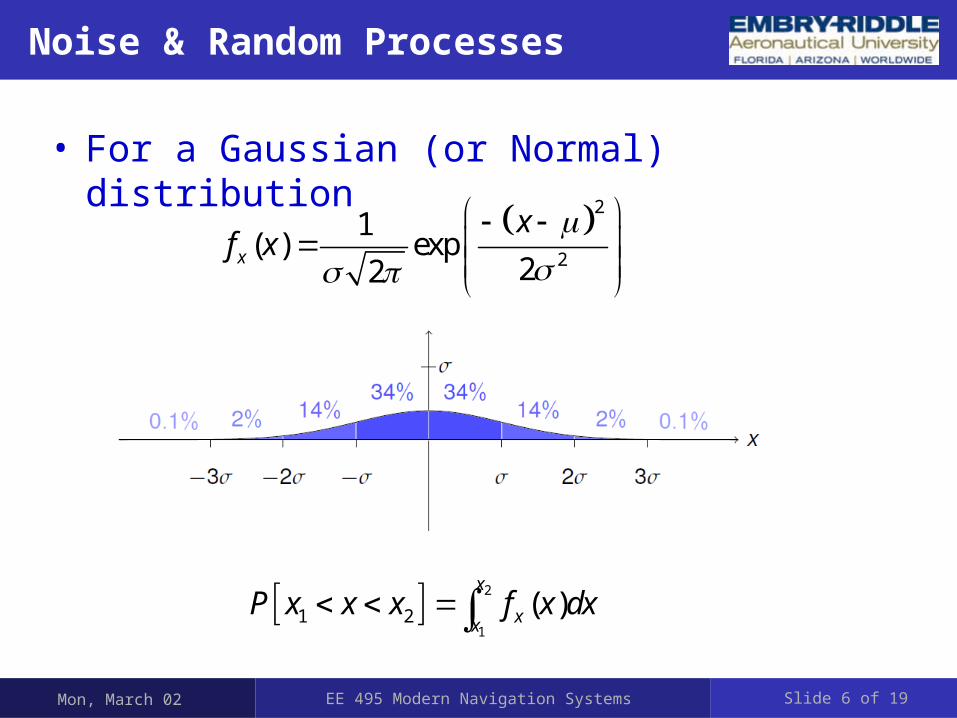
• For a Gaussian (or Normal) distribution
22
1( ) exp
22x
xf x
2
11 2 ( )
x
xxP x x x f x dx
Slide 6 of 19
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.01
0
0.01
0.02
0.03
0.04
0.05
Rxx
()
Autocorrelation Function of Quiescent Gyro Measurements
(sec)
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
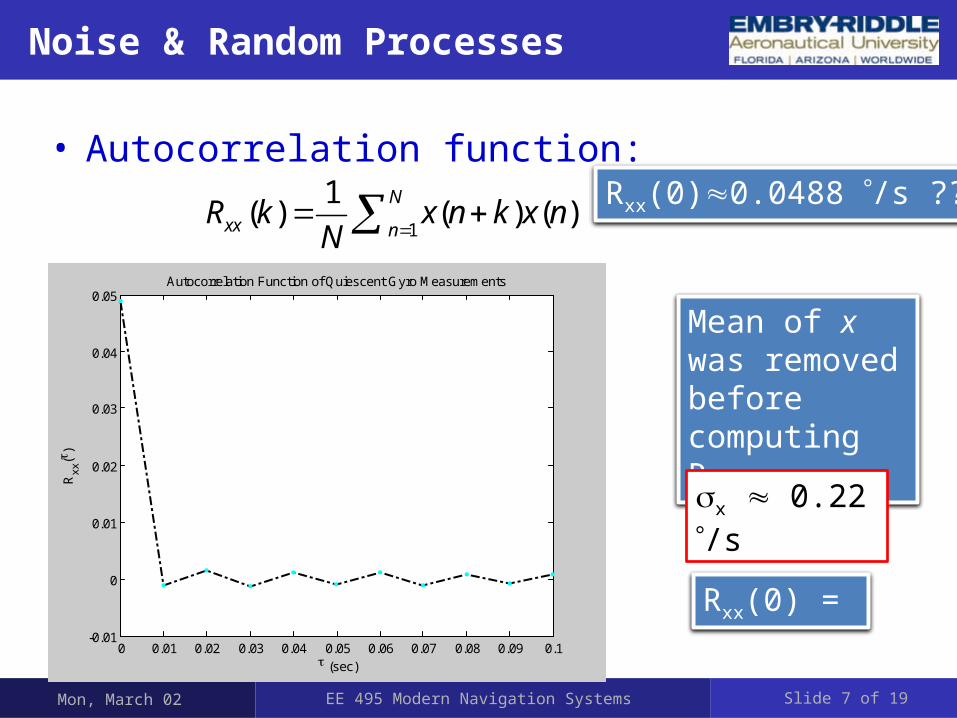
• Autocorrelation function:
1
1( ) ( ) ( )
N
xx nR k x n k x n
N
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-0.01
0
0.01
0.02
0.03
0.04
0.05
Rxx
()
Autocorrelation Function of Quiescent Gyro Measurements
(sec)
Rxx(0)0.0488 /s ??
Mean of x was removed before computing Rxx
Slide 7 of 19
x 0.22 /s
Rxx(0) =
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-9
-8
-7
-6
-5
-4
-3
-2
-1
0
1x 10
-3
Rxy
()
Crosscorrelation Function of Two Gyro Measurements
(sec)
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
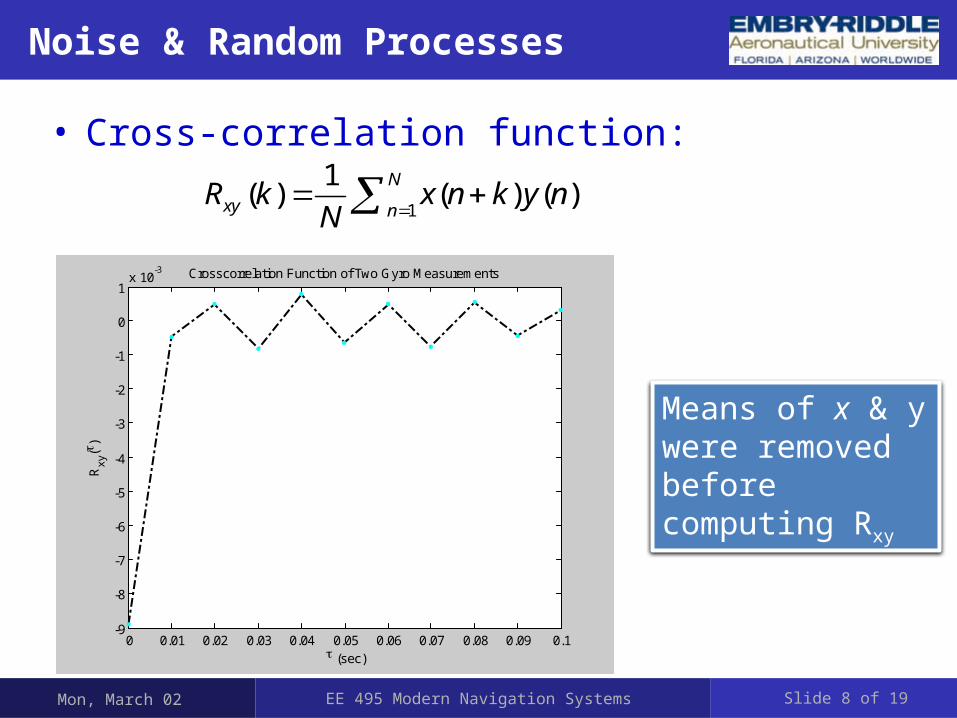
• Cross-correlation function:
1
1( ) ( ) ( )
N
xy nR k x n k y n
N
Means of x & y were removed before computing Rxy
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-9
-8
-7
-6
-5
-4
-3
-2
-1
0
1x 10
-3
Rxy
()
Crosscorrelation Function of Two Gyro Measurements
(sec)
Slide 8 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
• Ideal signals and real-world signals differ!!
• Infinitely long• Continuous in time
and magnitude• True distribution of
power vs frequency
Ideal Signals• Finite length• Discrete in time and
magnitude (digital)• Approximate
distribution of power vs frequency
Real-World Signals
Slide 9 of 19
Noise & Random ProcessesEnergy Signals vs Power Signals
Mon, March 02 EE 495 Modern Navigation Systems
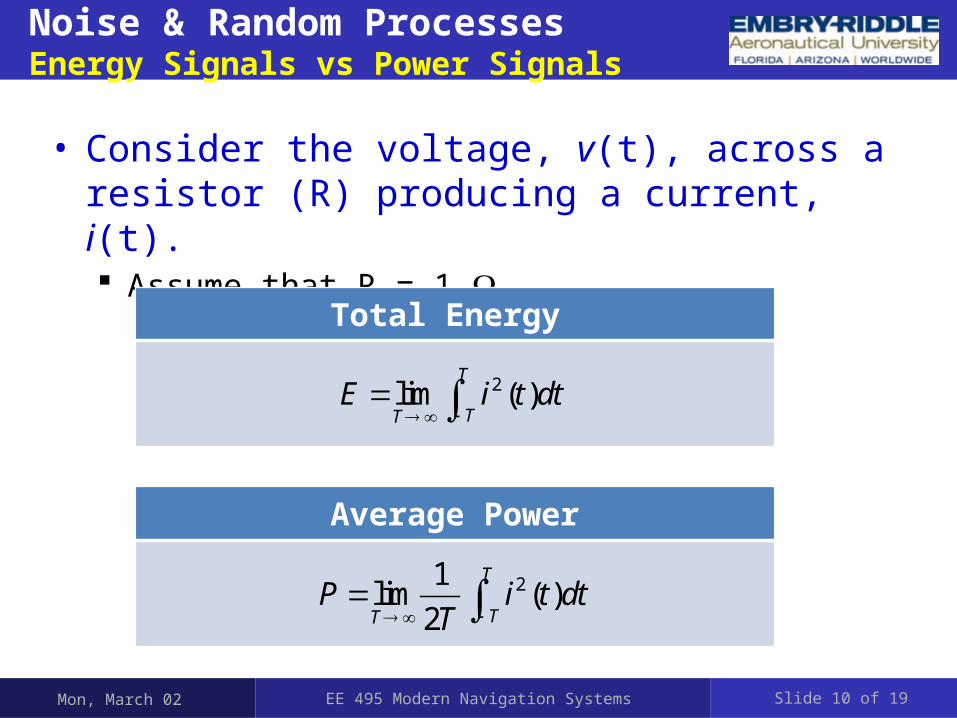
• Consider the voltage, v(t), across a resistor (R) producing a current, i(t). Assume that R = 1
Total Energy
2lim ( )T
TTE i t dt
Average Power
21lim ( )
2
T
TTP i t dt
T
Slide 10 of 19
Noise & Random ProcessesEnergy Signals vs Power Signals
Mon, March 02 EE 495 Modern Navigation Systems
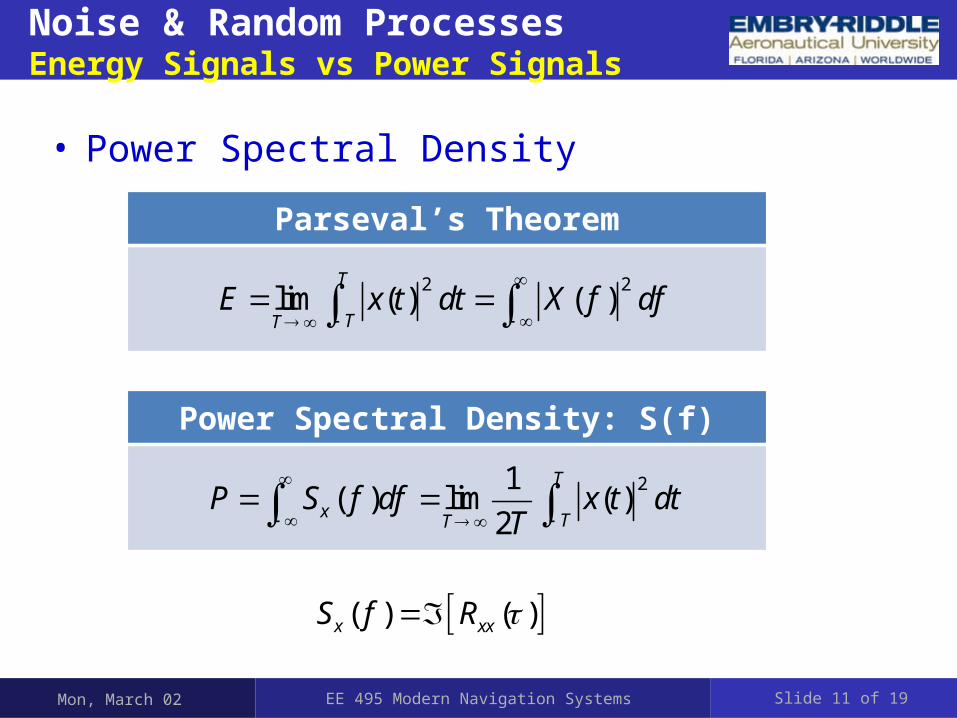
Parseval’s Theorem
2 2lim ( ) ( )
T
TTE x t dt X f df
Power Spectral Density: S(f)
21( ) lim ( )
2
T
x TTP S f df x t dt
T
• Power Spectral Density
( ) ( )x xxS f R
Slide 11 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
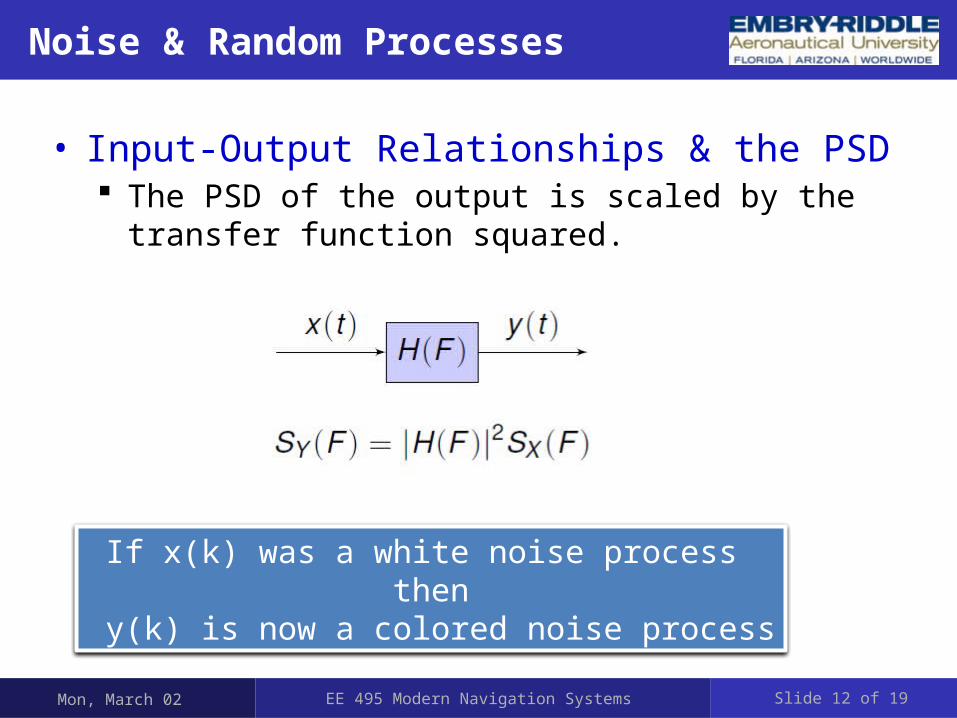
• Input-Output Relationships & the PSD The PSD of the output is scaled by the transfer function
squared.
If x(k) was a white noise process then
y(k) is now a colored noise process
Slide 12 of 19
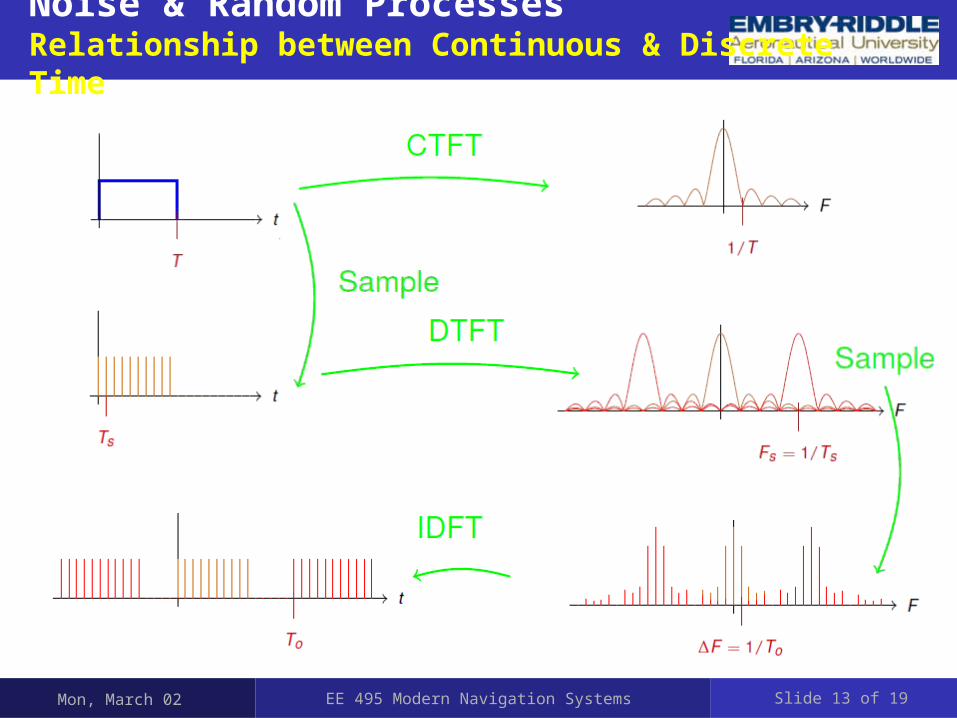
Noise & Random ProcessesRelationship between Continuous & Discrete Time
Mon, March 02 EE 495 Modern Navigation Systems Slide 13 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
• Key Points: Must sample more than twice bandwidth to avoid aliasing FFT represents a periodic version of the time domain signal
o Could have time domain aliasing Number of points in FFT is the same as number of points in
time domain signal.
[Pxx,f] = pwelch(x, window, noverlap, nfft, Fs, 'range')
% x - The time domain signal (samples) of length N% window - Length in samples of a smoothing filter (default N/8)% noverlap - 50% overlap is the default% nfft - Number of points in the discrete freq domain% Fs - Sample frequency (Hz)% range - Two-sided or one-sided frequency range
Slide 14 of 19
1F
T
0 50 100 150 200 250 300 350 400 450 5000
0.05
0.1
0.15
0.2
0.25
Freq (Hz)
PS
D
Power Spectral Density (Pxx
)
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
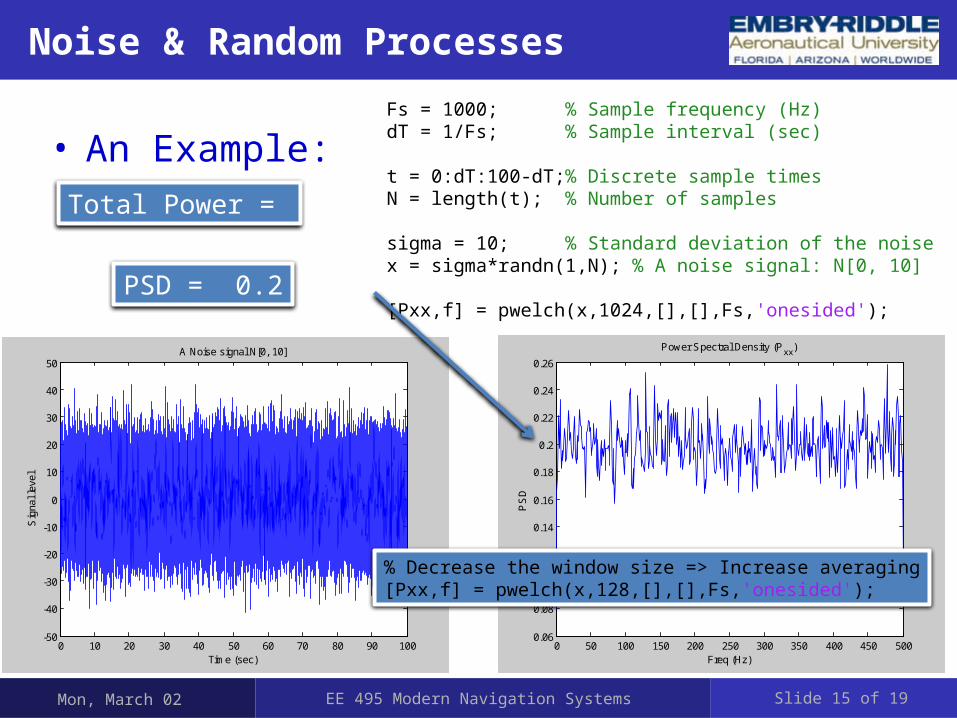
• An Example:Fs = 1000; % Sample frequency (Hz)dT = 1/Fs; % Sample interval (sec) t = 0:dT:100-dT;% Discrete sample timesN = length(t); % Number of samples sigma = 10; % Standard deviation of the noisex = sigma*randn(1,N); % A noise signal: N[0, 10]
[Pxx,f] = pwelch(x,1024,[],[],Fs,'onesided');
0 10 20 30 40 50 60 70 80 90 100-50
-40
-30
-20
-10
0
10
20
30
40
50
Time (sec)
Sig
nal l
evel
A Noise signal N[0, 10]
0 50 100 150 200 250 300 350 400 450 5000.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
0.22
0.24
0.26
Freq (Hz)
PS
D
Power Spectral Density (Pxx
)
Total Power =
% Decrease the window size => Increase averaging[Pxx,f] = pwelch(x,128,[],[],Fs,'onesided');
PSD = 0.2
Slide 15 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
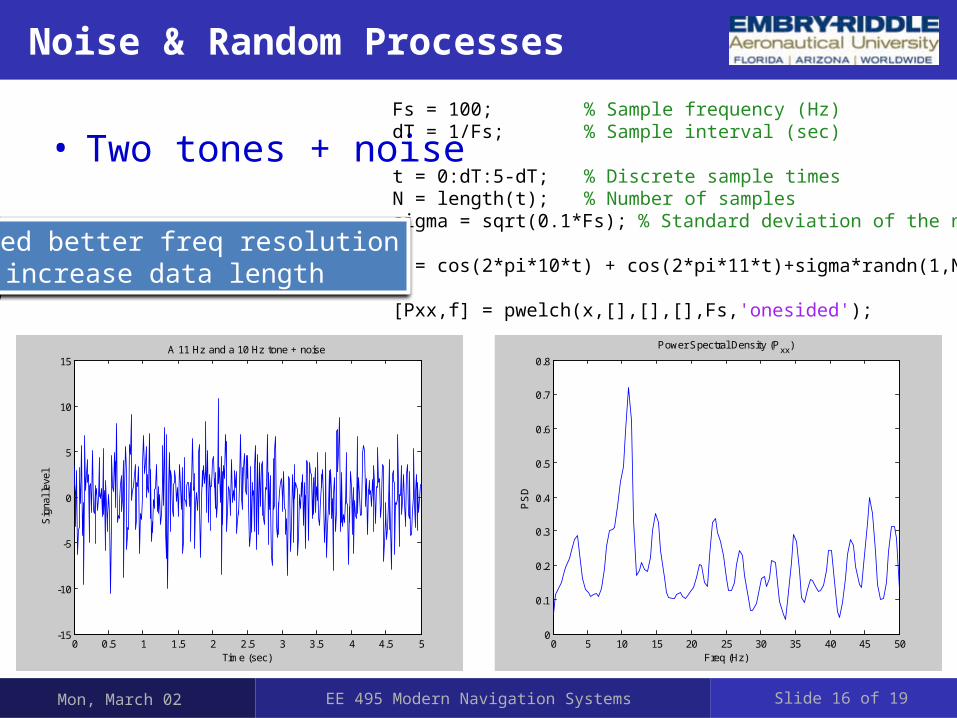
• Two tones + noiseFs = 100; % Sample frequency (Hz)dT = 1/Fs; % Sample interval (sec) t = 0:dT:5-dT; % Discrete sample timesN = length(t); % Number of samplessigma = sqrt(0.1*Fs); % Standard deviation of the noise x = cos(2*pi*10*t) + cos(2*pi*11*t)+sigma*randn(1,N);
[Pxx,f] = pwelch(x,[],[],[],Fs,'onesided');
0 5 10 15 20 25 30 35 40 45 500
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Freq (Hz)
PS
D
Power Spectral Density (Pxx
)
Need better freq resolution increase data length
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-15
-10
-5
0
5
10
15
Time (sec)
Sig
nal l
evel
A 11 Hz and a 10 Hz tone + noise
Slide 16 of 19
Noise & Random Processes
Mon, March 02 EE 495 Modern Navigation Systems
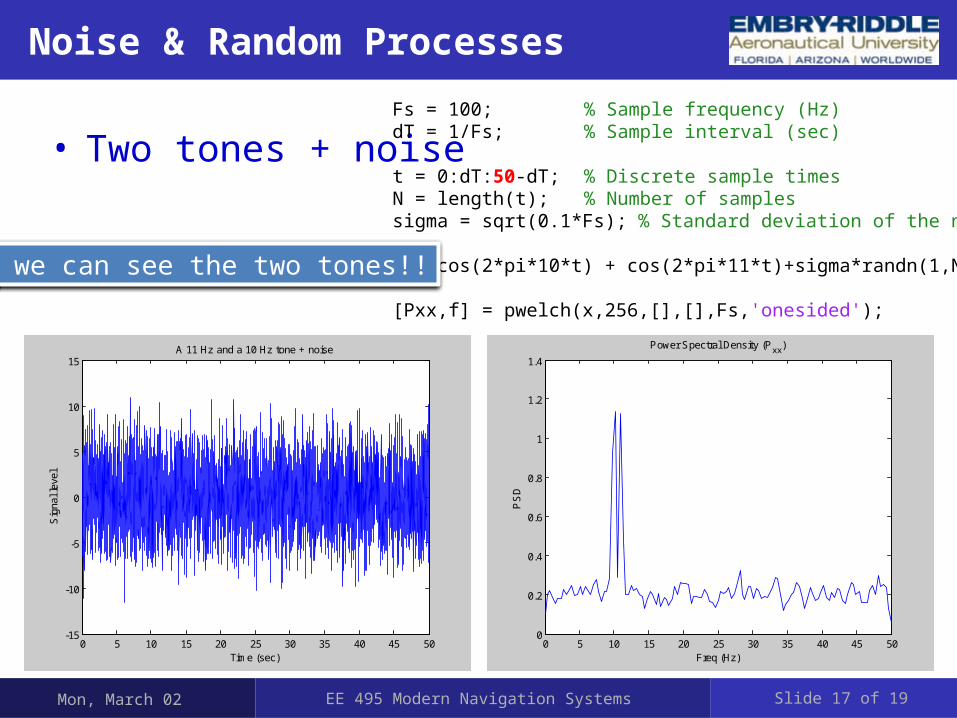
• Two tones + noiseFs = 100; % Sample frequency (Hz)dT = 1/Fs; % Sample interval (sec) t = 0:dT:50-dT; % Discrete sample timesN = length(t); % Number of samplessigma = sqrt(0.1*Fs); % Standard deviation of the noise x = cos(2*pi*10*t) + cos(2*pi*11*t)+sigma*randn(1,N);
[Pxx,f] = pwelch(x,256,[],[],Fs,'onesided');
Now we can see the two tones!!
0 5 10 15 20 25 30 35 40 45 50-15
-10
-5
0
5
10
15
Time (sec)
Sig
nal l
evel
A 11 Hz and a 10 Hz tone + noise
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2
1.4
Freq (Hz)
PS
D
Power Spectral Density (Pxx
)
Slide 17 of 19
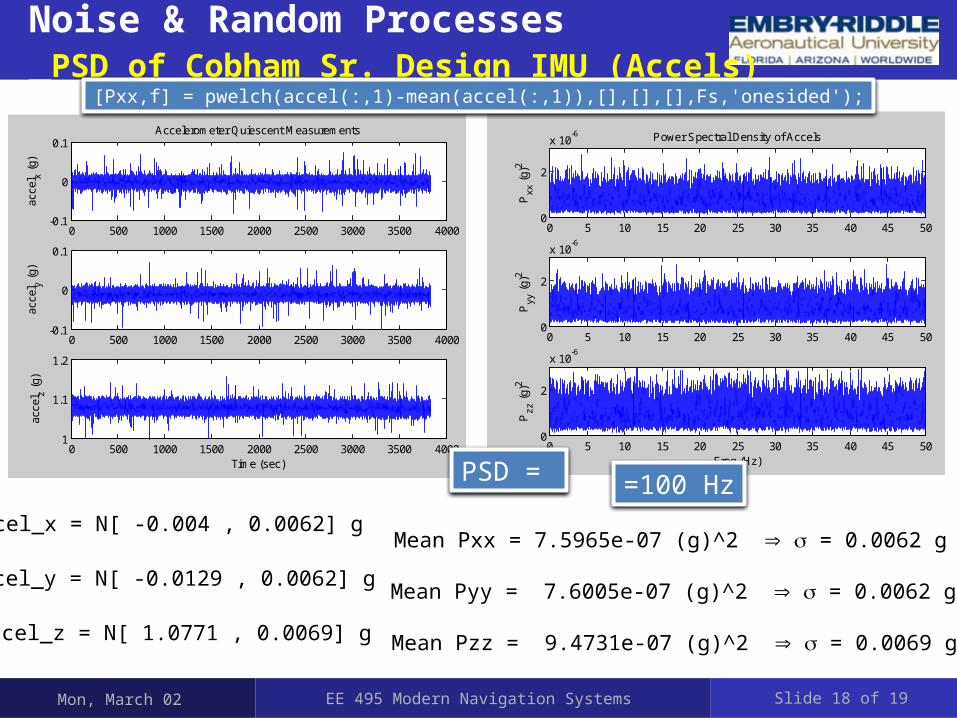
Noise & Random Processes_PSD of Cobham Sr. Design IMU (Accels)
Mon, March 02 EE 495 Modern Navigation Systems
0 5 10 15 20 25 30 35 40 45 500
2
x 10-6
Pxx
(g)
2
Power Spectral Density of Accels
0 5 10 15 20 25 30 35 40 45 500
2
x 10-6
Pyy
(g)
2
0 5 10 15 20 25 30 35 40 45 500
2
x 10-6
Freq (Hz)
Pzz
(g)
2
0 500 1000 1500 2000 2500 3000 3500 4000-0.1
0
0.1
acce
l x (g)
Accelerometer Quiescent Measurements
0 500 1000 1500 2000 2500 3000 3500 4000-0.1
0
0.1
acce
l y (g)
0 500 1000 1500 2000 2500 3000 3500 40001
1.1
1.2
acce
l z (g)
Time (sec)
Accel_x = N[ -0.004 , 0.0062] g
Accel_y = N[ -0.0129 , 0.0062] g
Accel_z = N[ 1.0771 , 0.0069] g
Mean Pxx = 7.5965e-07 (g)^2 = 0.0062 g
PSD =
Mean Pyy = 7.6005e-07 (g)^2 = 0.0062 g
Mean Pzz = 9.4731e-07 (g)^2 = 0.0069 g
[Pxx,f] = pwelch(accel(:,1)-mean(accel(:,1)),[],[],[],Fs,'onesided');
Slide 18 of 19
=100 Hz
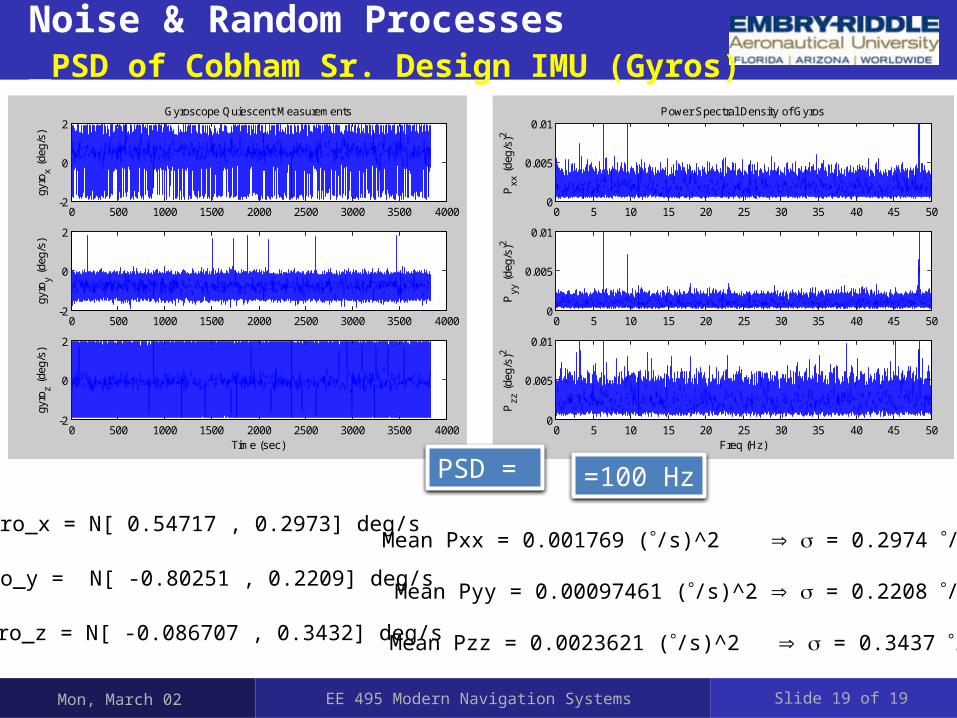
Noise & Random Processes_PSD of Cobham Sr. Design IMU (Gyros)
Mon, March 02 EE 495 Modern Navigation Systems
0 5 10 15 20 25 30 35 40 45 500
0.005
0.01
Pxx
(de
g/s)
2
Power Spectral Density of Gyros
0 5 10 15 20 25 30 35 40 45 500
0.005
0.01
Pyy
(de
g/s)
2
0 5 10 15 20 25 30 35 40 45 500
0.005
0.01
Freq (Hz)
Pzz
(de
g/s)
2
0 500 1000 1500 2000 2500 3000 3500 4000-2
0
2
gyro
x (de
g/s)
Gyroscope Quiescent Measurements
0 500 1000 1500 2000 2500 3000 3500 4000-2
0
2
gyro
y (de
g/s)
0 500 1000 1500 2000 2500 3000 3500 4000-2
0
2
gyro
z (de
g/s)
Time (sec)
Gyro_x = N[ 0.54717 , 0.2973] deg/s
Gyro_y = N[ -0.80251 , 0.2209] deg/s
Gyro_z = N[ -0.086707 , 0.3432] deg/s
Mean Pxx = 0.001769 (/s)^2 = 0.2974 /s
Mean Pyy = 0.00097461 (/s)^2 = 0.2208 /s
Mean Pzz = 0.0023621 (/s)^2 = 0.3437 /s
PSD =
Slide 19 of 19
=100 Hz