differential evolution
DESCRIPTION
An introduction to differntial evolution algorithm , Explained mathematically and graphically with contour plots of test functions using Matlab.TRANSCRIPT
IntroductionOptimization is viewed as a decision
problem that involves finding the best values of the decision variables over all possibilities.
The best values would give the smallest objective function value for a minimization problem or the largest objective function value for a maximization problem.
In terms of real world applications, the objective function is often a representation of some physically significant measure such as profit, loss, utility, risk or error.
Evolution in Biology
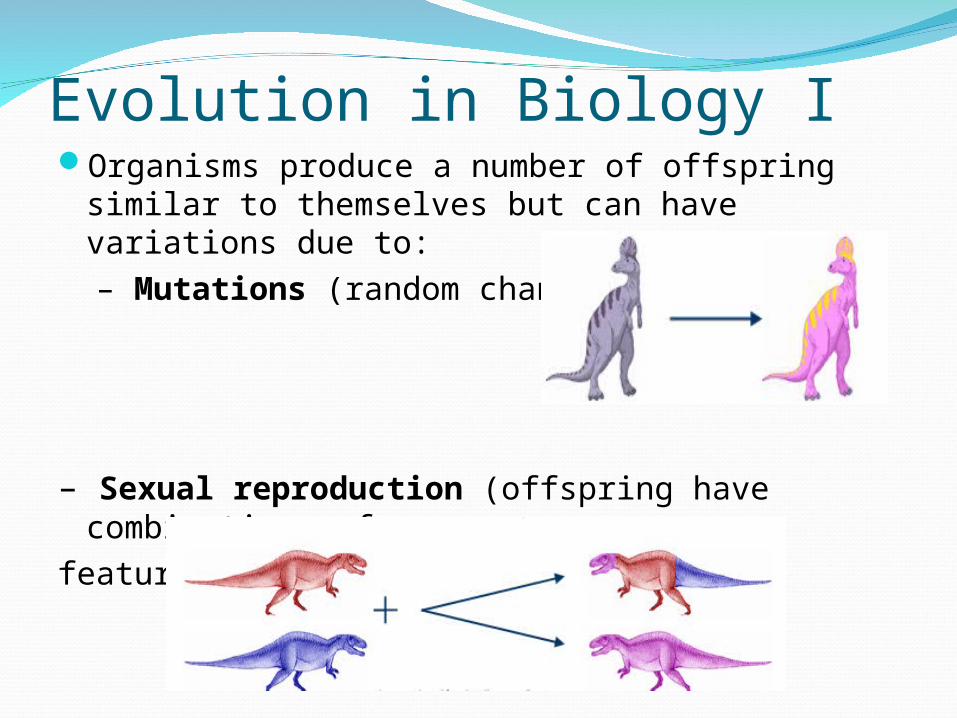
Evolution in Biology IOrganisms produce a number of offspring similar
to themselves but can have variations due to: – Mutations (random changes)
– Sexual reproduction (offspring have combinations of
features inherited from each parent)
Evolution in Biology IISome offspring survive, and produce next generations,
and some don’t:– The organisms adapted to the environment better have higher chance to survive– Over time, the generations become more and more adapted because the fittest organisms survive
Differential EvolutionPopulation-based optimisation algorithmIntroduced by Storn and Price in 1996But many practical problems have objective
functions that are non-differentiable, hence gradient based methods cannot be employed
Developed to optimise mixed integer-discrete-continuous non-linear programming as against the continuous non-linear programming which is done by most of the algorithms.
Why use Differential Evolution?All evolutionary algorithms use predefined
probability density functions(PDFs) for parameter perturbation. These PDFs have to be adapted throughout the optimization by a process that imposes additional complexity to the optimization procedures.
DE is a self-adjusting as it deduces the perturbation information from the distances between the vectors that comprise the population.
Problem
The populationA population is a congregation of individuals. An
important characteristic feature of a population is its age, expressed in terms of generation.
where Np is the size of population denoted by i g defines the generation counter and D the dimensionality, i.e. the number of variables in X.E.g. X=[x1;x2;x3] =>D=3, we take a population size of 5
=>Np=5 and suppose we wish to see the results for 20 generations => g=20
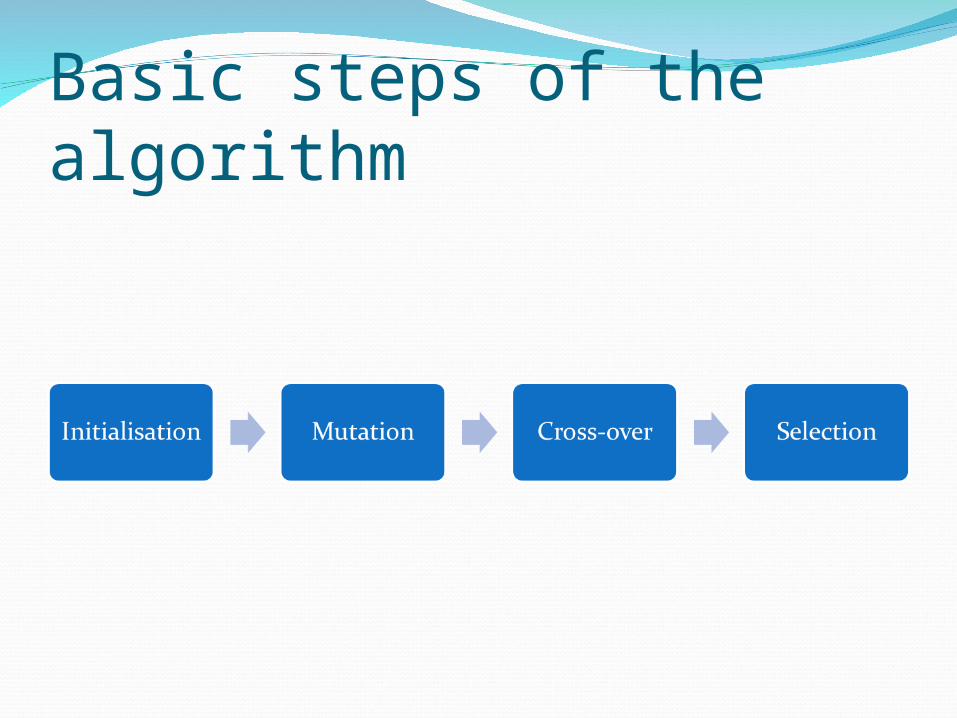
Basic steps of the algorithm
Initialization of the population
X is a D-dimensional initialization vectors, bL and bU indicate the lower and upper bounds
of the parameter vectors xi,j. The random number generator, randj[0,1),
returns a uniformly distributed random number from within the range [0,1), i.e., 0 ≤ randj[0,1) < 1.
The subscript, j, indicates that a new random value is generated for each parameter.
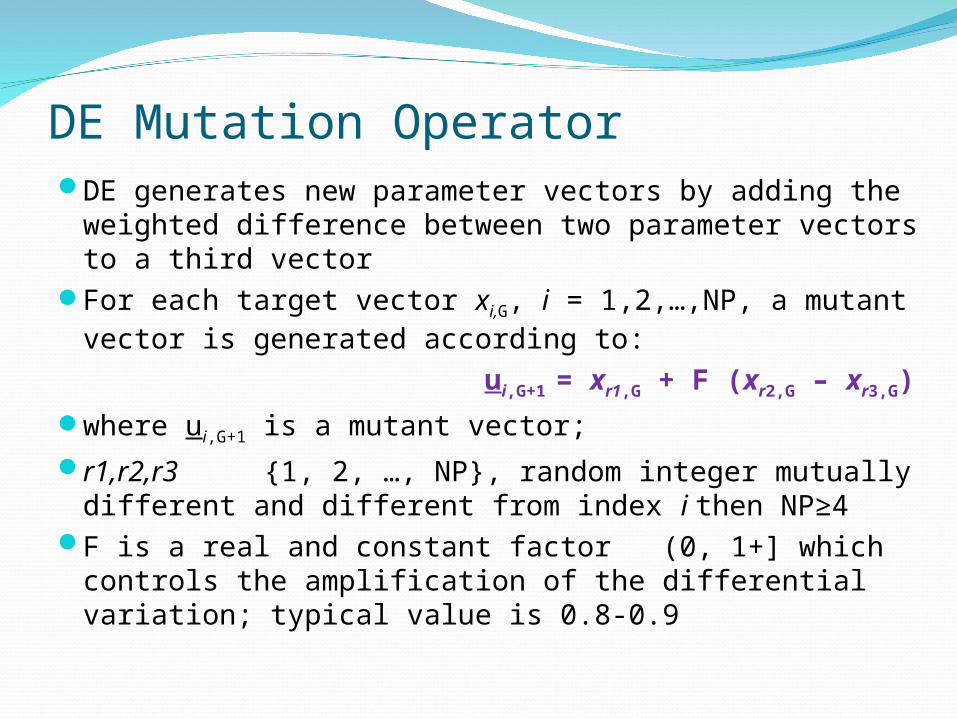
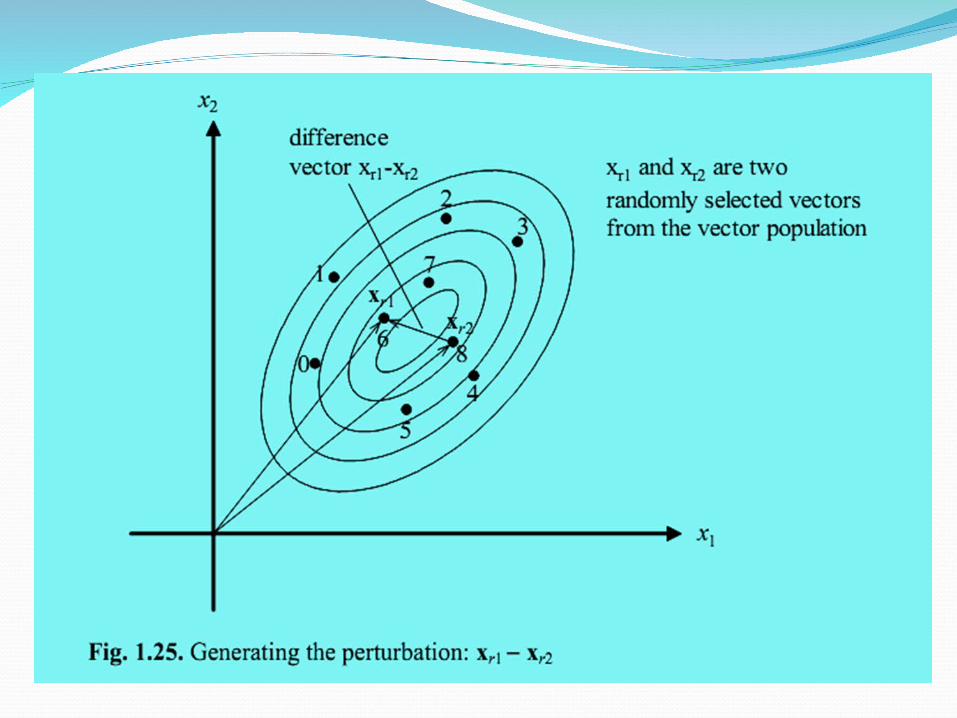
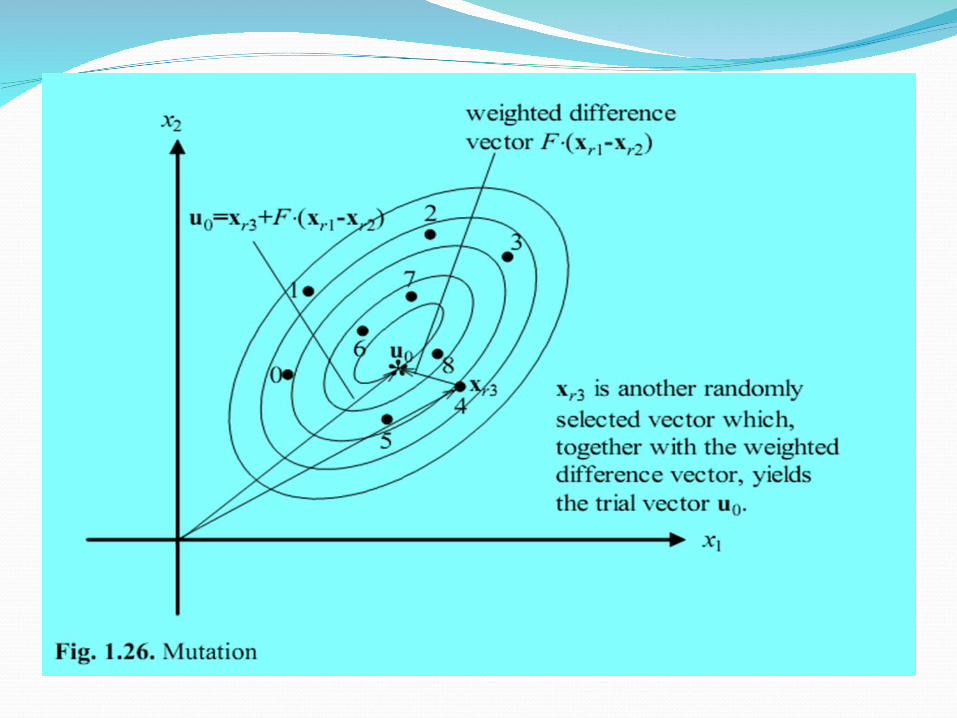
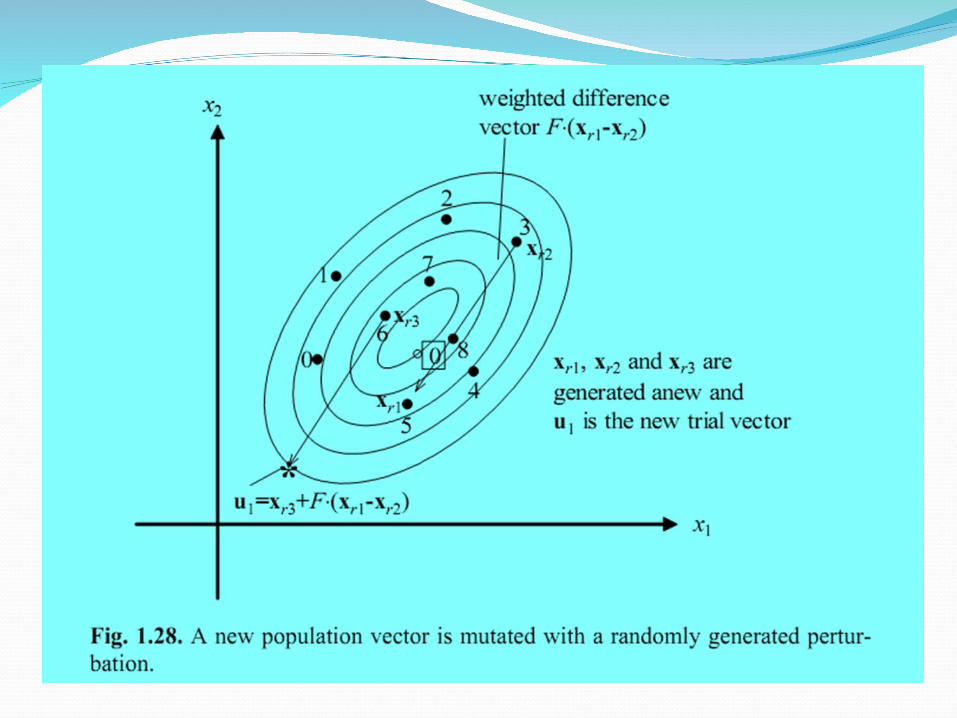
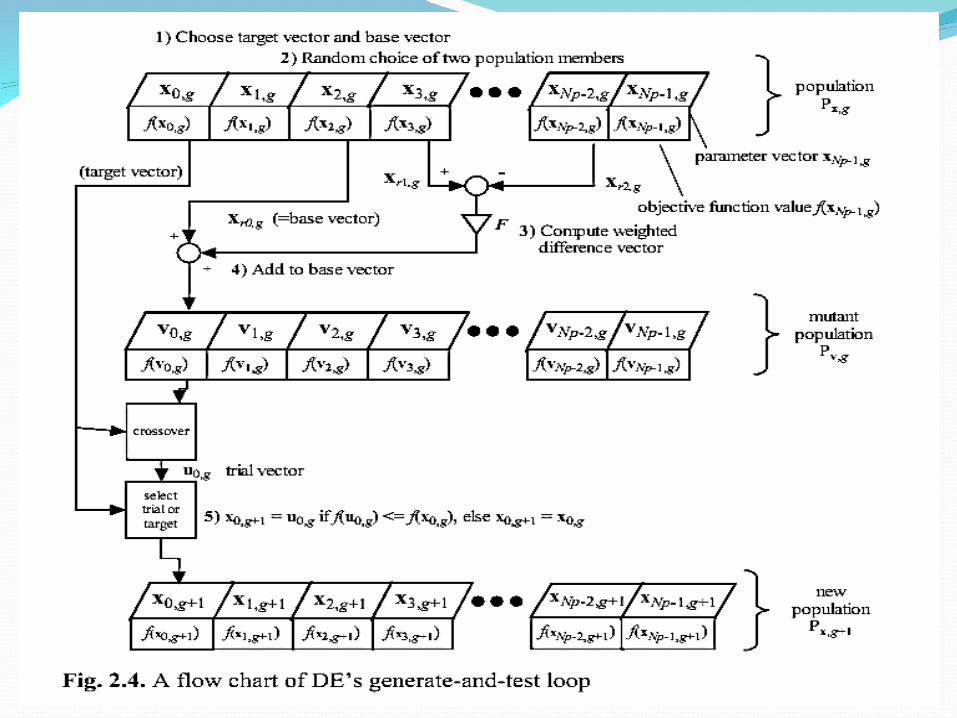
DE Mutation OperatorDE generates new parameter vectors by adding the
weighted difference between two parameter vectors to a third vector
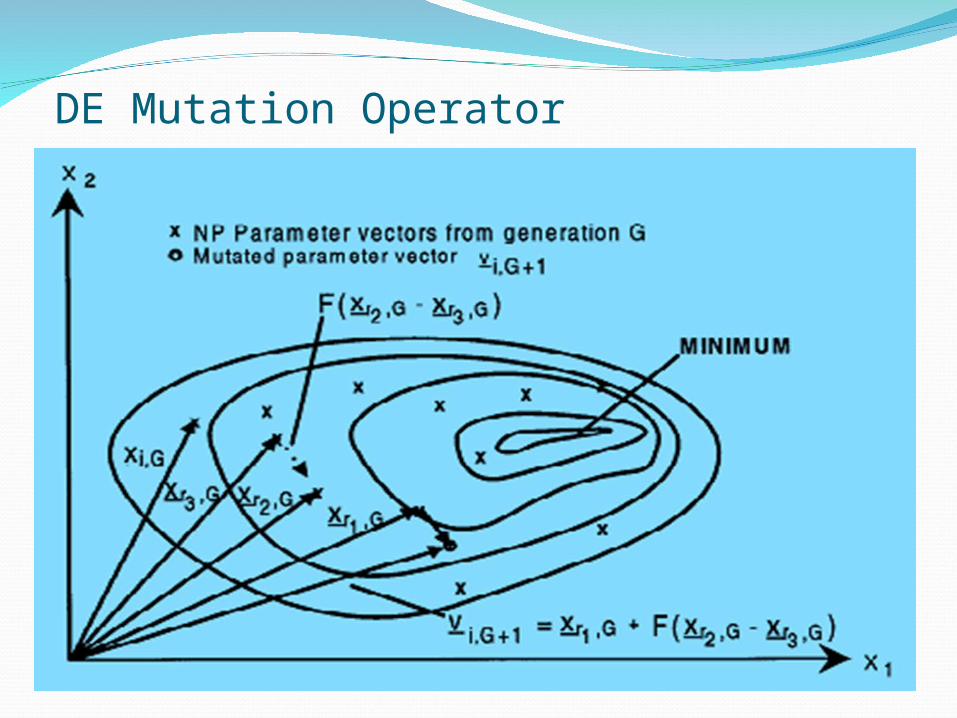
For each target vector xi,G, i = 1,2,…,NP, a mutant vector is generated according to:
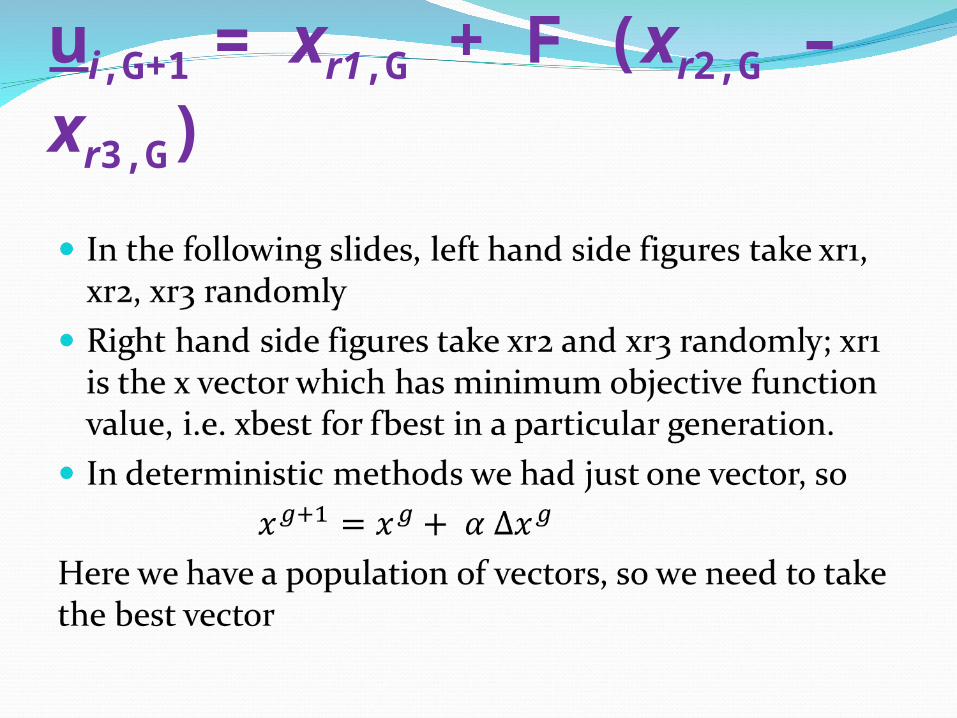
ui,G+1 = xr1,G + F (xr2,G – xr3,G)
where ui,G+1 is a mutant vector; r1,r2,r3 {1, 2, …, NP}, random integer mutually
different and different from index i then NP≥4F is a real and constant factor (0, 1+] which controls
the amplification of the differential variation; typical value is 0.8-0.9
DE Mutation Operator
CrossoverThe classic variant of diversity enhancement is
crossover which mixes parameters of the mutation vector vi,g and the so-called target vector xi,g in order to generate the trial vector ui,g. The most common form of crossover is uniform and is defined as
The crossover probability, Cr ∈ [0,1], is a user-defined value that controls the fraction of parameter values that are copied from the mutant.
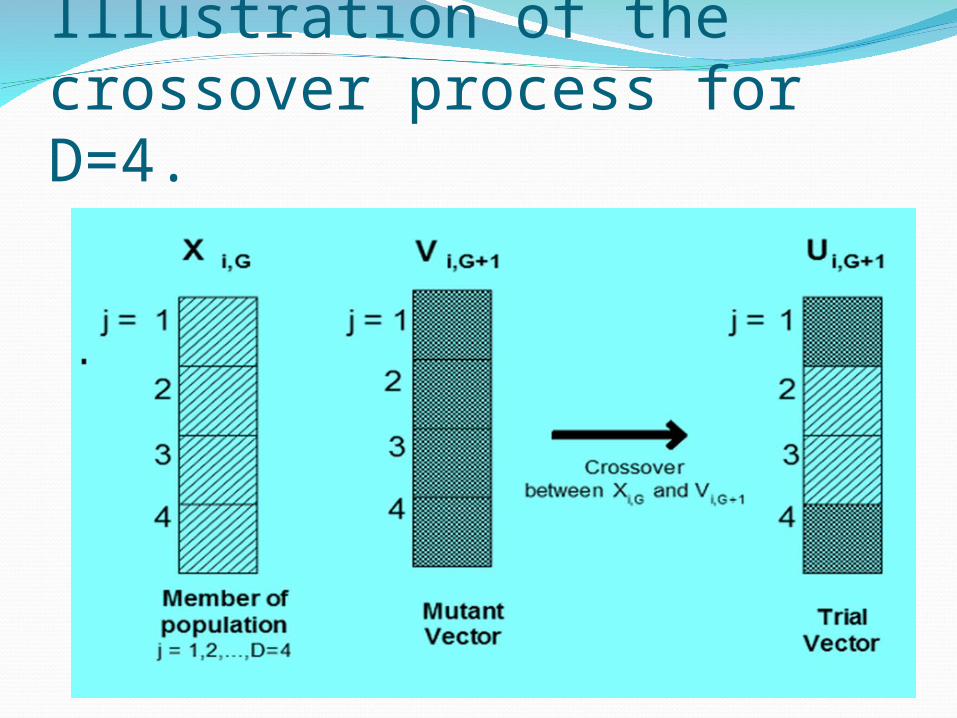
Illustration of the crossover process for D=4.
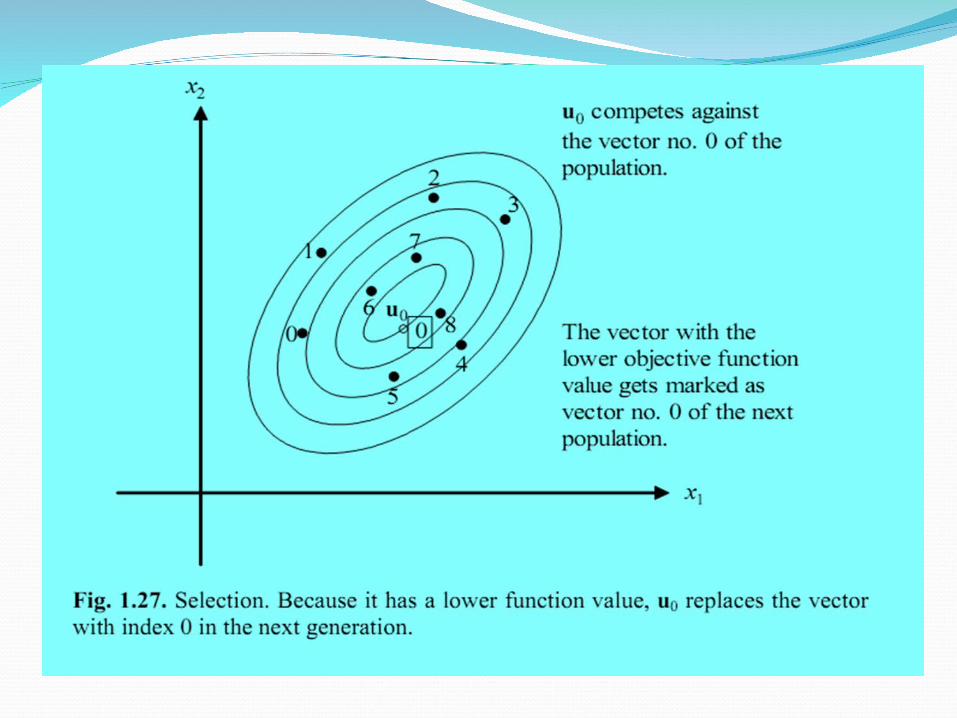
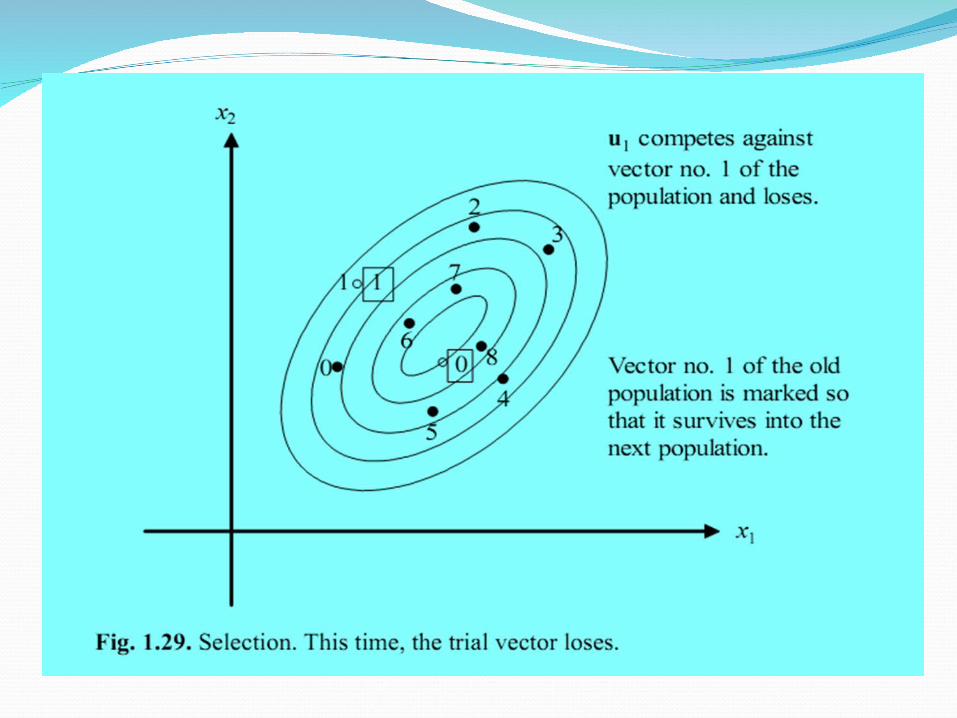
SelectionDE uses simple one-to-one survivor selection
where the trial vector ui,g competes against the target vector xi,g. The vector with the lowest objective function value survives into the next generation g+1
Termination criteriaa preset number of maximum generations,the difference between the best and worst
function values in the population is verysmall,the best function value has not improved
beyond some tolerance value for a predefined number of generations,
the distance between solution vectors in the population is small.
Intrinsic Control Parameters of Differential Evolution1. population size Np;2. mutation intensities Fy3. crossover probability pc
1. First Choice2. The originators recommend Np/N=10,
F=0.8, and pc =0.9. However, F=0.5 and pc=0.1 are also claimed to be a good first choice.
Adjusting Intrinsic Control ParametersDifferent problems usually require different
intrinsic control parameters.Increasing the population size is suggested
if differential evolution does not converge. However, this only helps to a certain extent.
Mutation intensity has to be adjusted a little lower or higher than 0.8 if population size is increased. It is claimed that convergence is more likely to occur but generally takes longer with larger population and weaker mutation (smaller F).
DE dynamicsThere are two opposing mechanisms that
influence DE’s population.1) Population tendency to expand and
explore the terrain on which it is working. It also prevents DE’s population from converging prematurely.
2)By selection, expansion is counteracted by removing vectors which are located in unproductive regions.
Sample problem
Here it is a two variable problem, so D=2The demonstration is for first 2 generations
so g=2We take a population size of 5 so Np=5xL=-2.048xU=2.048
.0.0)(* and ]048.2 ,048.2[with
x1.^2).^2- (x2*100 x1).^2- (1 y )(2
x
x
fx
f
j
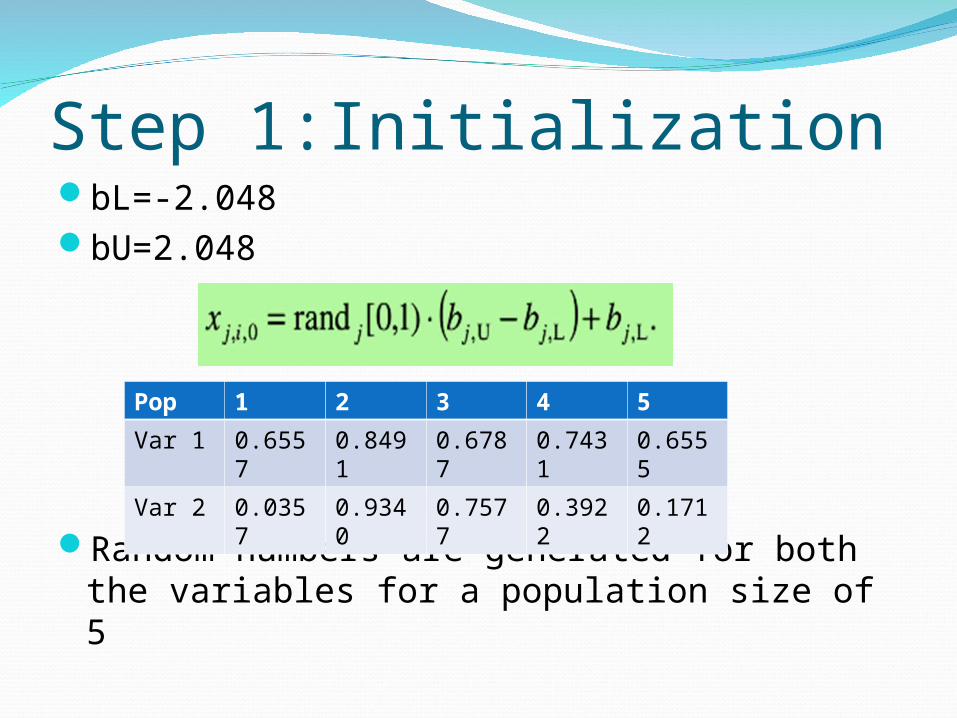
Step 1:InitializationbL=-2.048bU=2.048
Random numbers are generated for both the variables for a population size of 5
Pop 1 2 3 4 5
Var 1 0.6557
0.8491
0.6787
0.7431
0.6555
Var 2 0.0357
0.9340
0.7577
0.3922
0.1712
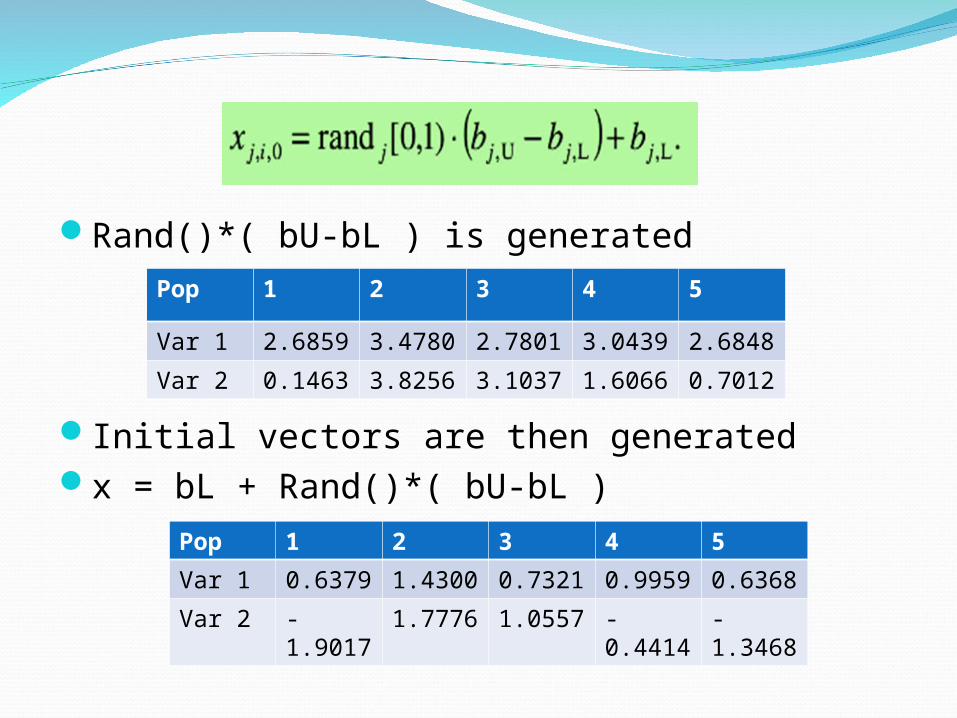
Rand()*( bU-bL ) is generated
Initial vectors are then generatedx = bL + Rand()*( bU-bL )
Pop 1 2 3 4 5
Var 1 2.6859 3.4780 2.7801 3.0439 2.6848
Var 2 0.1463 3.8256 3.1037 1.6066 0.7012
Pop 1 2 3 4 5
Var 1 0.6379 1.4300 0.7321 0.9959 0.6368
Var 2 -1.9017
1.7776 1.0557 -0.4414
-1.3468
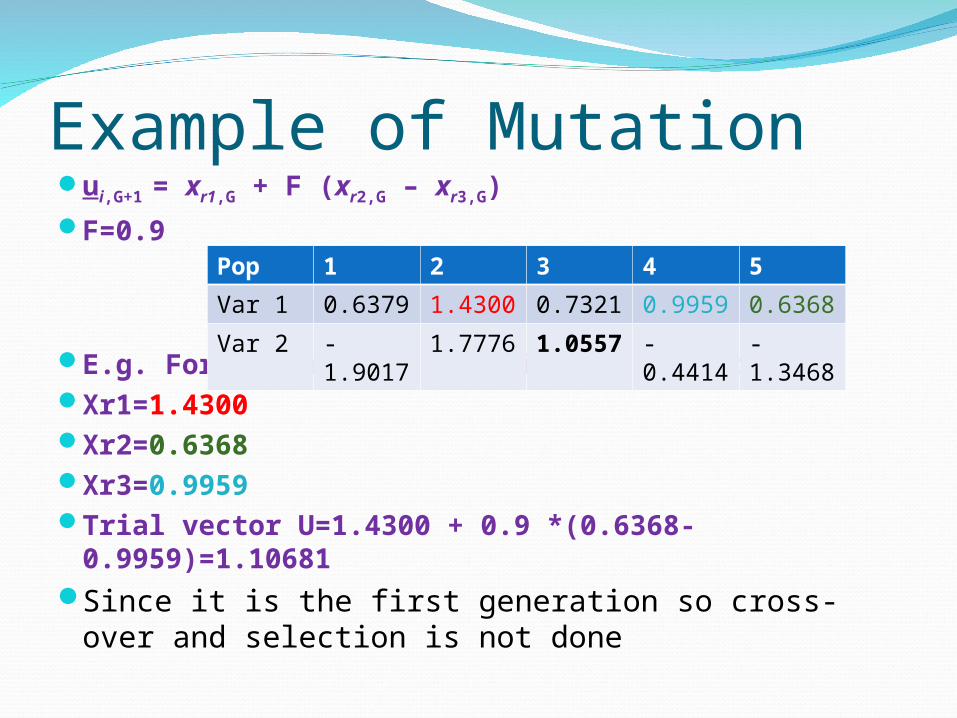
Example of Mutationui,G+1 = xr1,G + F (xr2,G – xr3,G)F=0.9
E.g. For 1st variable and first generationXr1=1.4300Xr2=0.6368Xr3=0.9959Trial vector U=1.4300 + 0.9 *(0.6368-
0.9959)=1.10681Since it is the first generation so cross-over and
selection is not done
Pop 1 2 3 4 5
Var 1 0.6379 1.4300 0.7321 0.9959 0.6368
Var 2 -1.9017
1.7776 1.0557
-0.4414
-1.3468
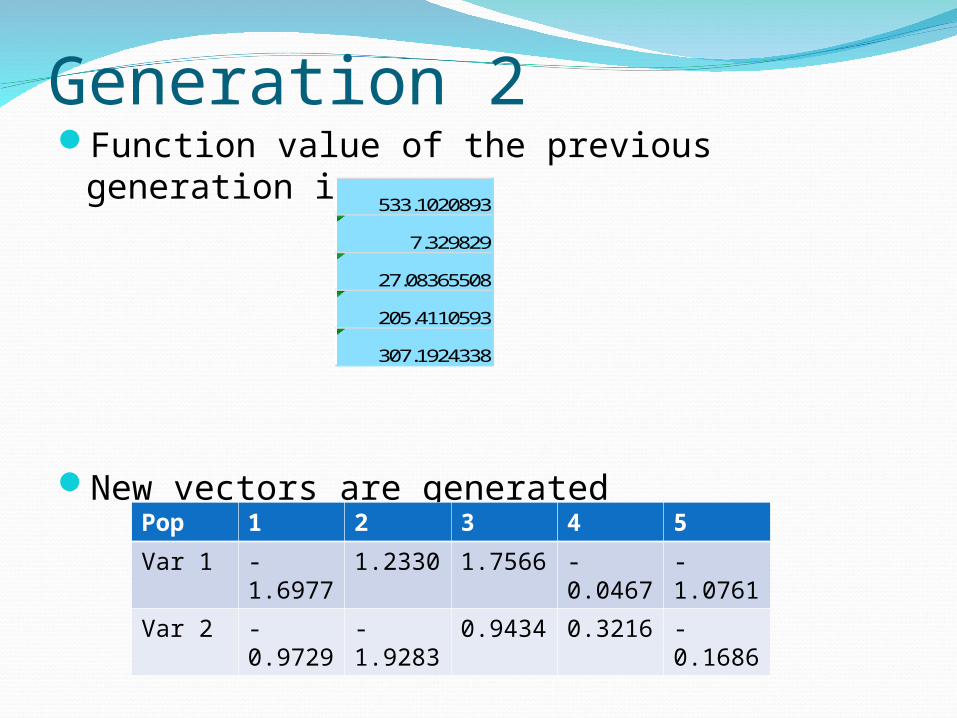
Generation 2Function value of the previous generation is
New vectors are generated
533.1020893
7.329829
27.08365508
205.4110593
307.1924338
Pop 1 2 3 4 5
Var 1 -1.6977
1.2330 1.7566 -0.0467
-1.0761
Var 2 -0.9729
-1.9283
0.9434 0.3216 -0.1686
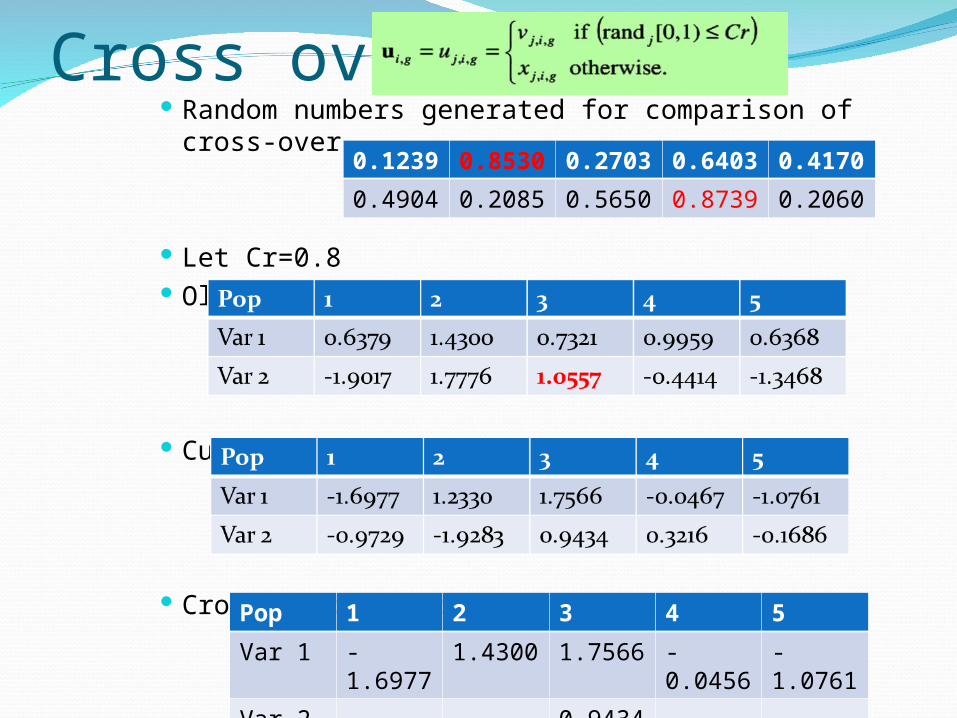
Cross over Random numbers generated for comparison of
cross-over
Let Cr=0.8 Old population
Current population x(i,2)
Crossed population u(i,2)
0.1239
0.8530
0.2703
0.6403
0.4170
0.4904 0.2085 0.5650 0.8739 0.2060
Pop 1 2 3 4 5
Var 1 -1.6977
1.4300 1.7566 -0.0456
-1.0761
Var 2 -0.9729
-1.9283
0.9434 -0.4414
-0.1686
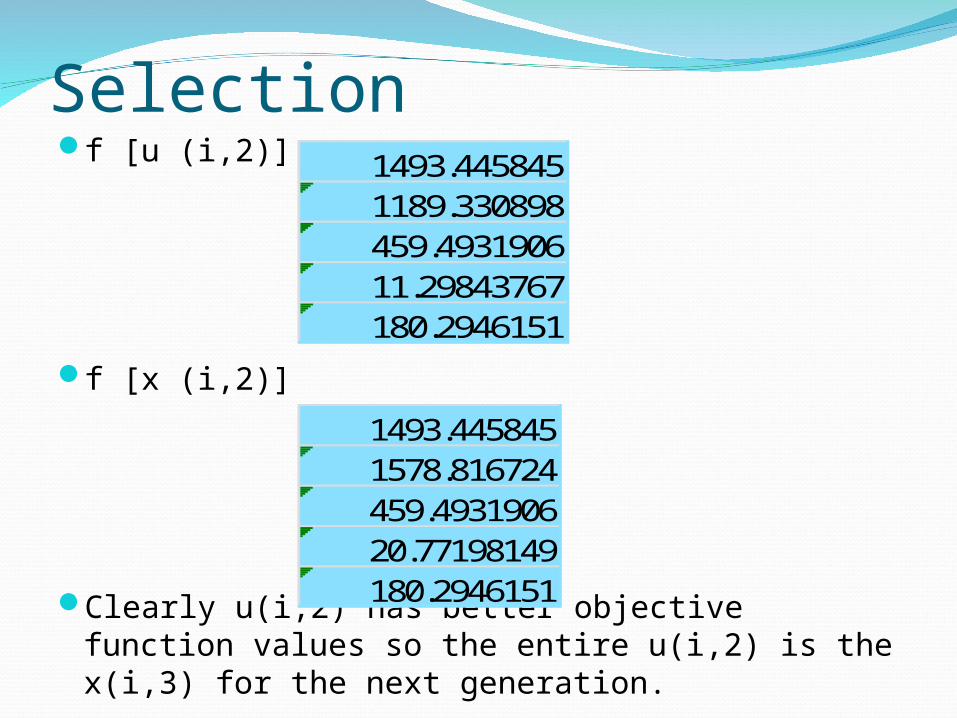
Selectionf [u (i,2)]
f [x (i,2)]
Clearly u(i,2) has better objective function values so the entire u(i,2) is the x(i,3) for the next generation.
1493.4458451189.330898459.493190611.29843767180.2946151
1493.4458451578.816724459.493190620.77198149180.2946151
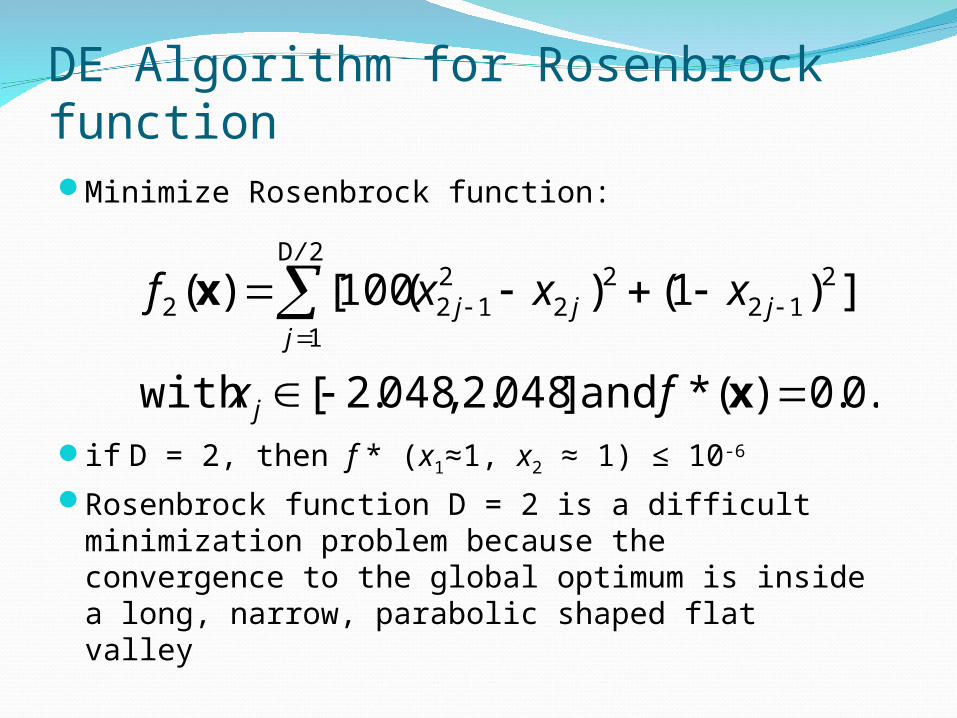
DE Algorithm for Rosenbrock functionMinimize Rosenbrock function:
if D = 2, then f * (x1≈1, x2 ≈ 1) ≤ 10-6
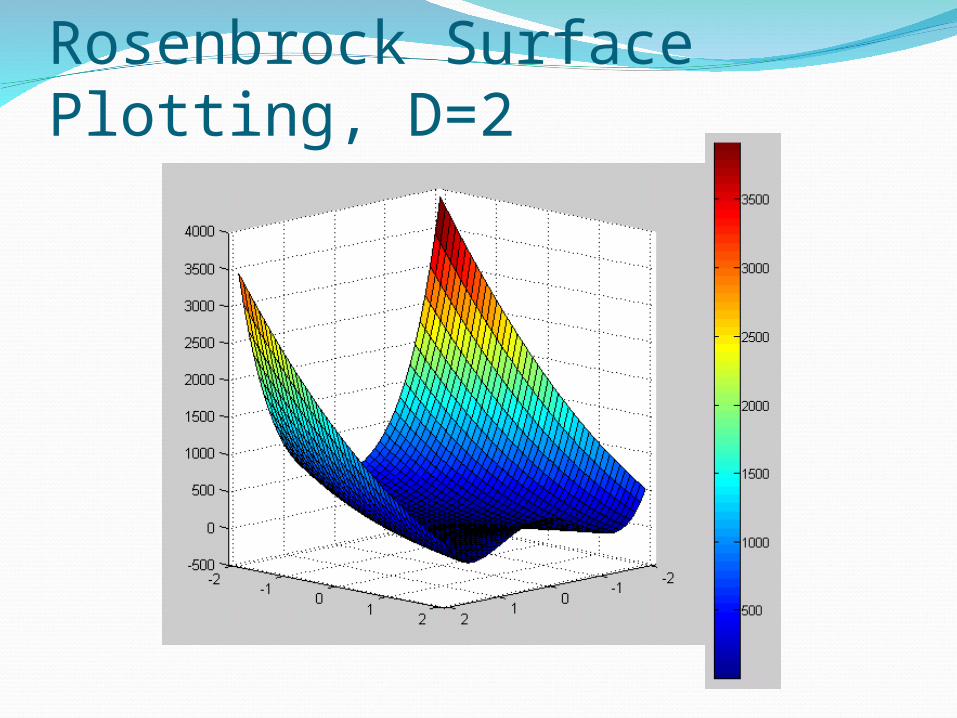
Rosenbrock function D = 2 is a difficult minimization problem because the convergence to the global optimum is inside a long, narrow, parabolic shaped flat valley
.0.0)(* and ]048.2 ,048.2[with
])1()(100[)( 212
22
212
2D
12
x
x
fx
xxxf
j
jjj
/
j
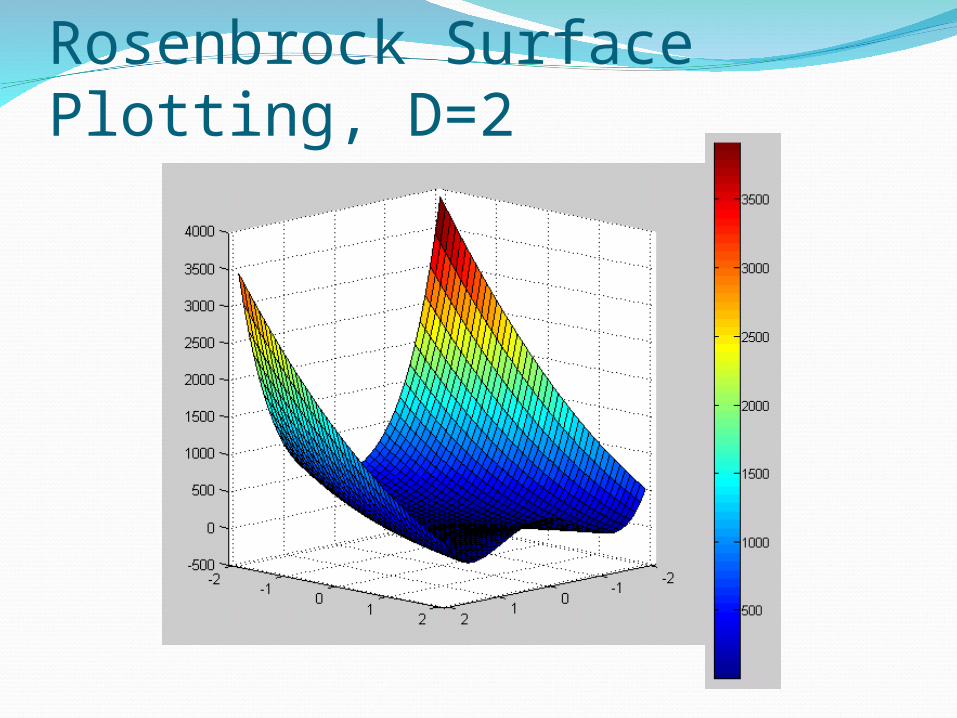
Rosenbrock Surface Plotting, D=2
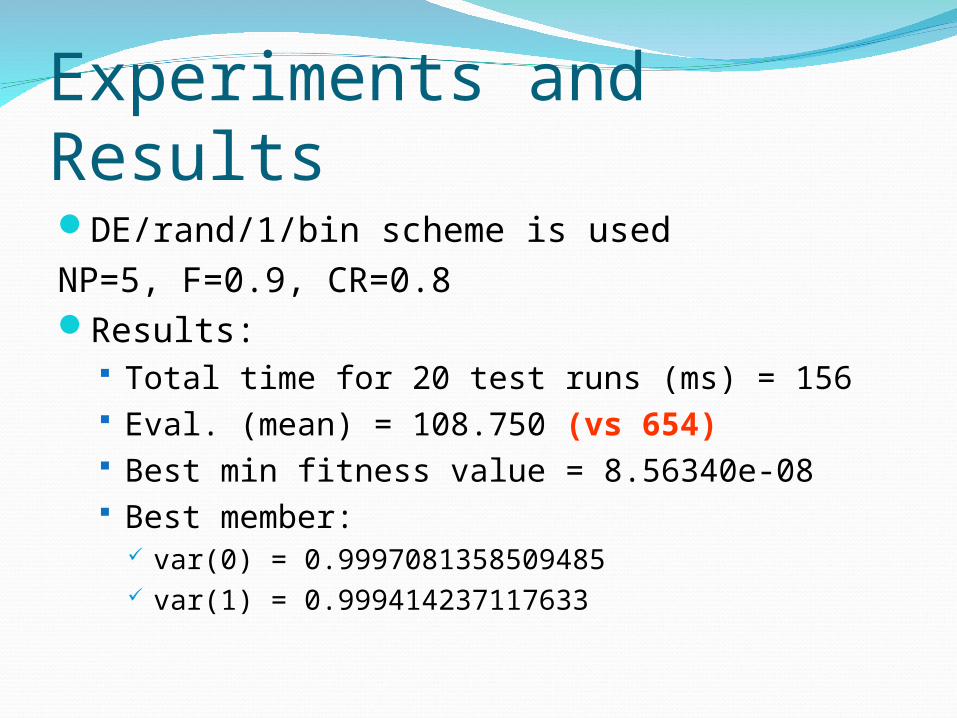
Experiments and ResultsDE/rand/1/bin scheme is usedNP=5, F=0.9, CR=0.8Results:
Total time for 20 test runs (ms) = 156 Eval. (mean) = 108.750 (vs 654) Best min fitness value = 8.56340e-08 Best member:
var(0) = 0.9997081358509485 var(1) = 0.999414237117633
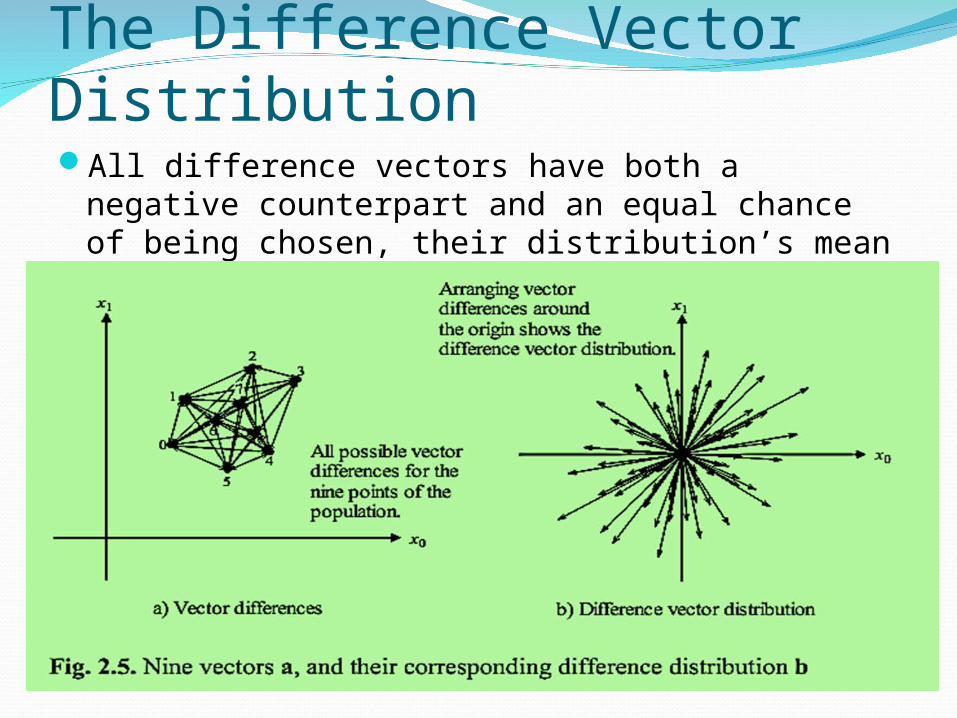
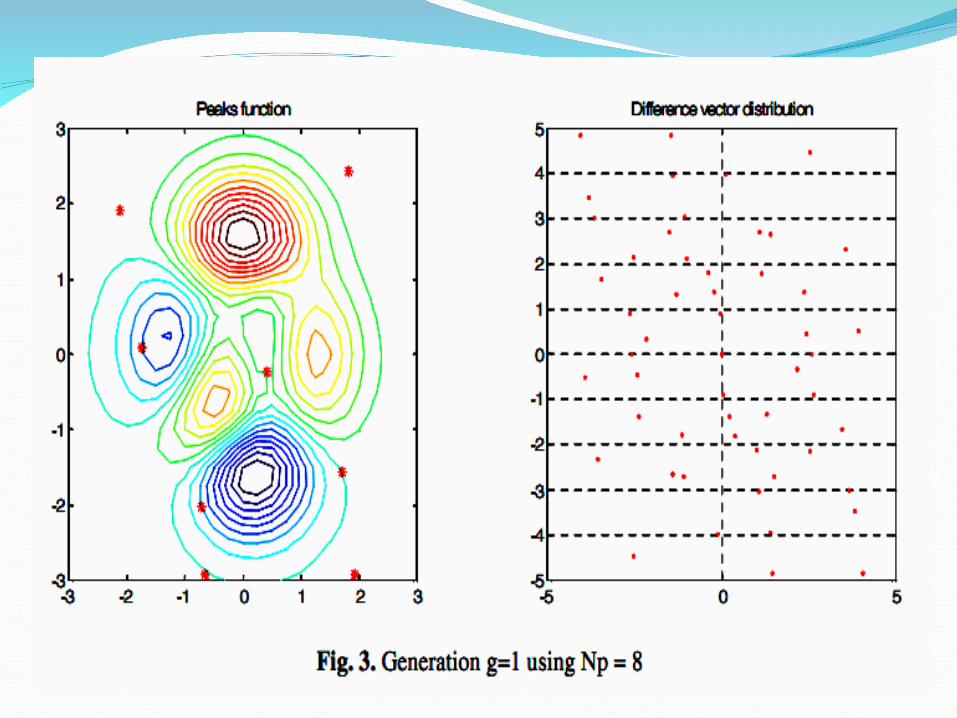
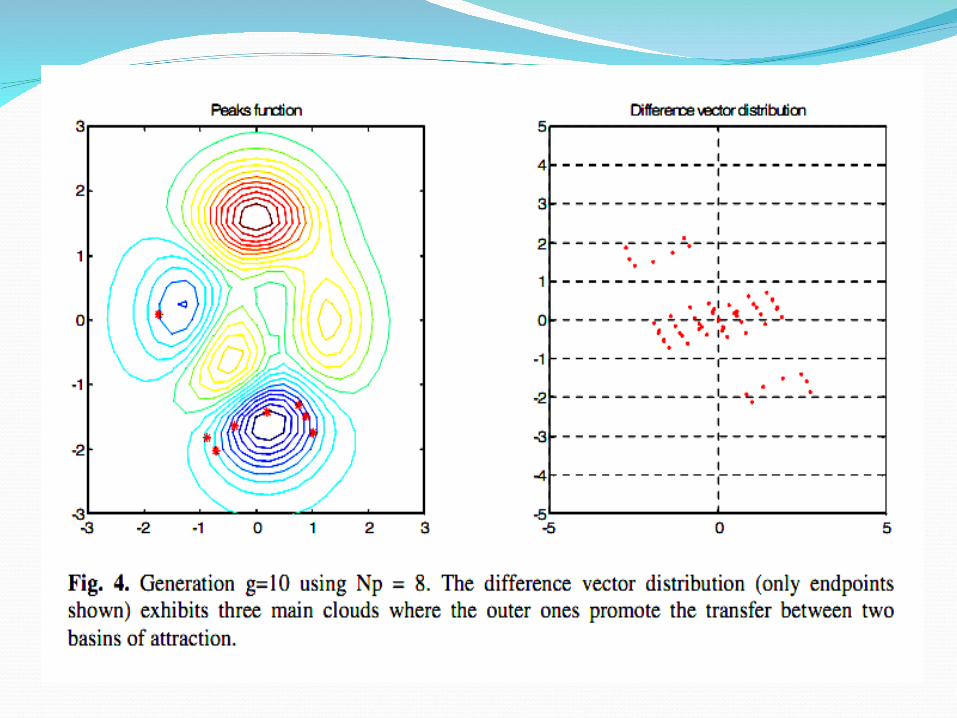
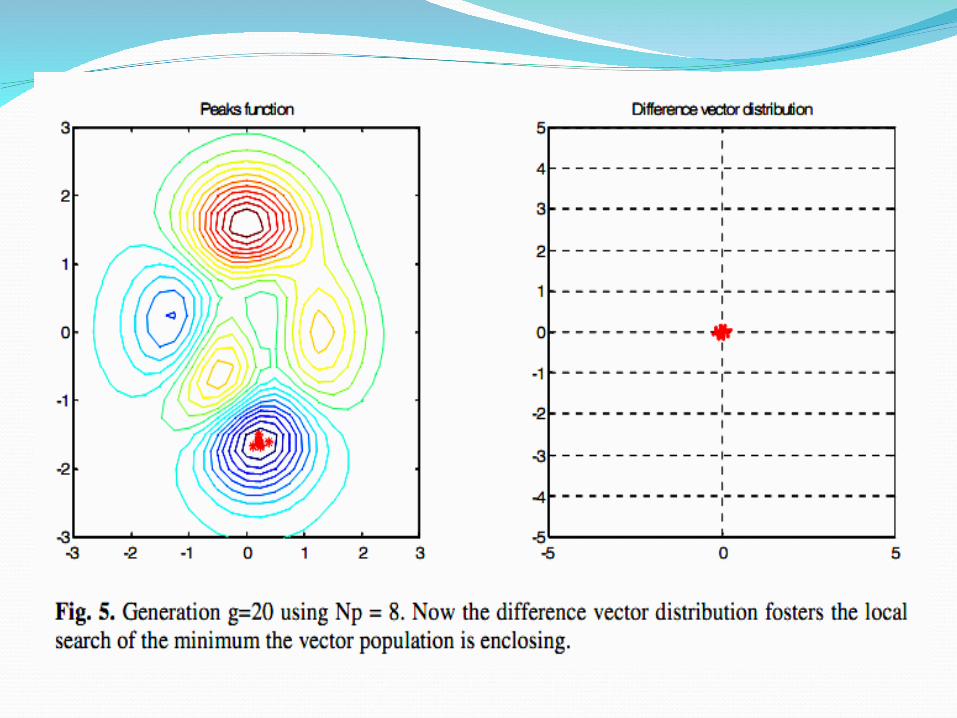
The Difference Vector Distribution All difference vectors have both a negative
counterpart and an equal chance of being chosen, their distribution’s mean is zero.
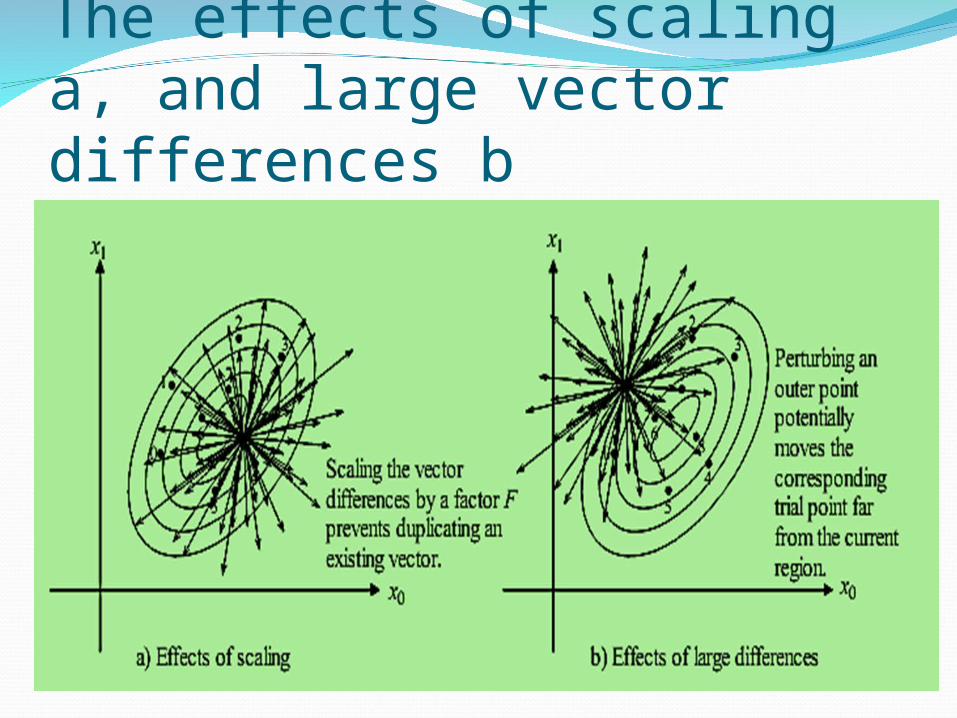
The effects of scaling a, and large vector differences b
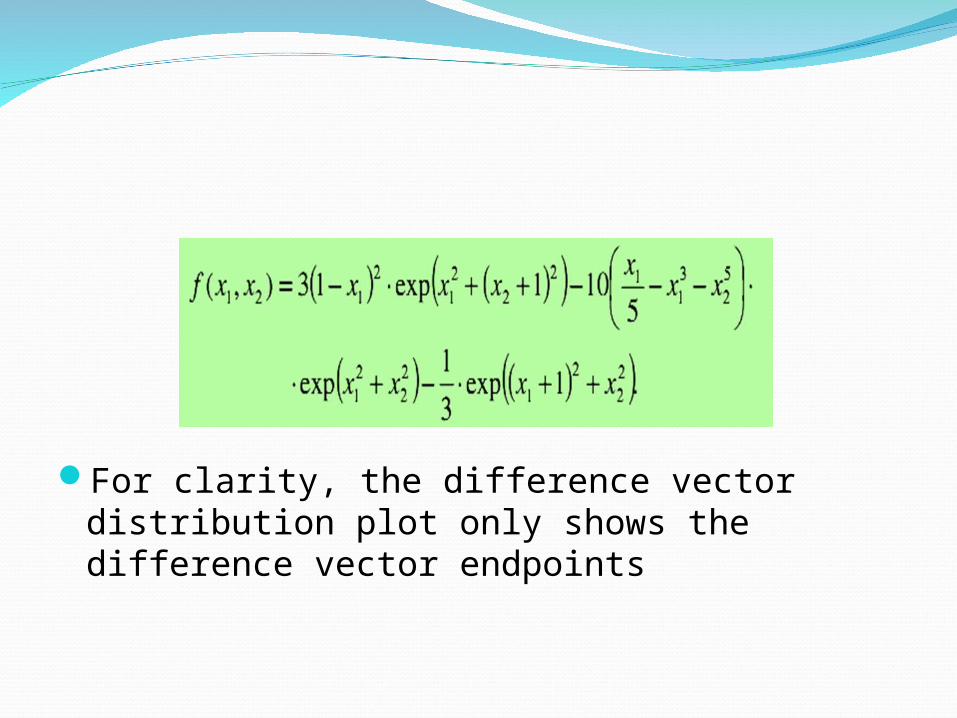
For clarity, the difference vector distribution plot only shows the difference vector endpoints
DE Algorithm for Rosenbrock functionMinimize Rosenbrock function:
if D = 2, then f * (x1≈1, x2 ≈ 1) ≤ 10-6
Rosenbrock function D = 2 is a difficult minimization problem because the convergence to the global optimum is inside a long, narrow, parabolic shaped flat valley
.0.0)(* and ]5 ,5[with
])1()(100[)( 21
22122
x
x
fx
xxxf
j
Rosenbrock Surface Plotting, D=2
ui,G+1 = xr1,G + F (xr2,G – xr3,G)
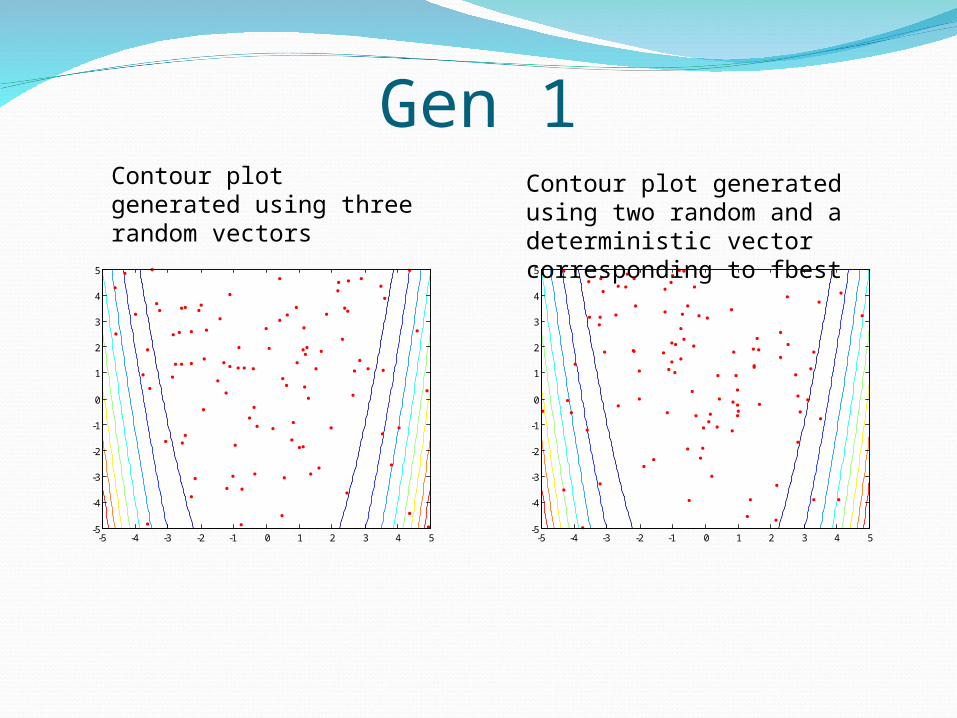
Gen 1
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
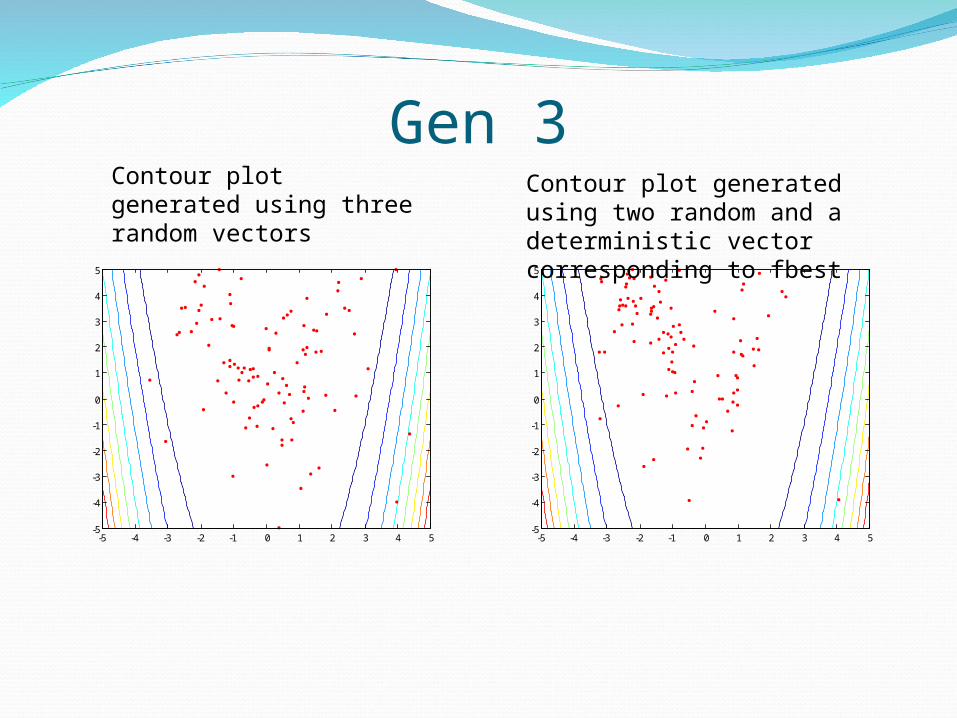
Gen 3
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
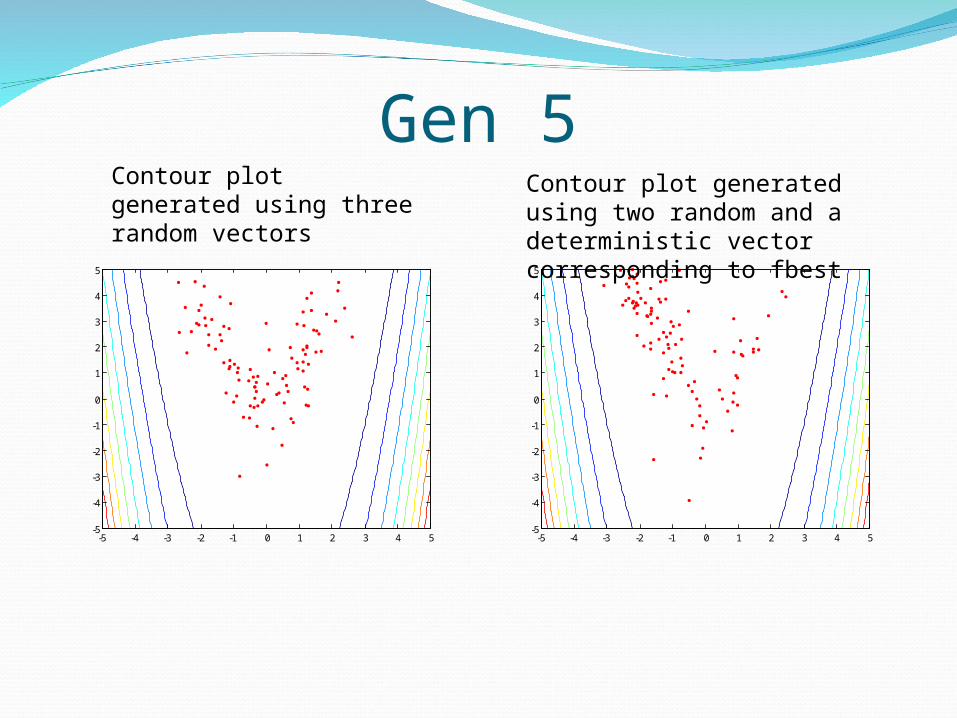
Gen 5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
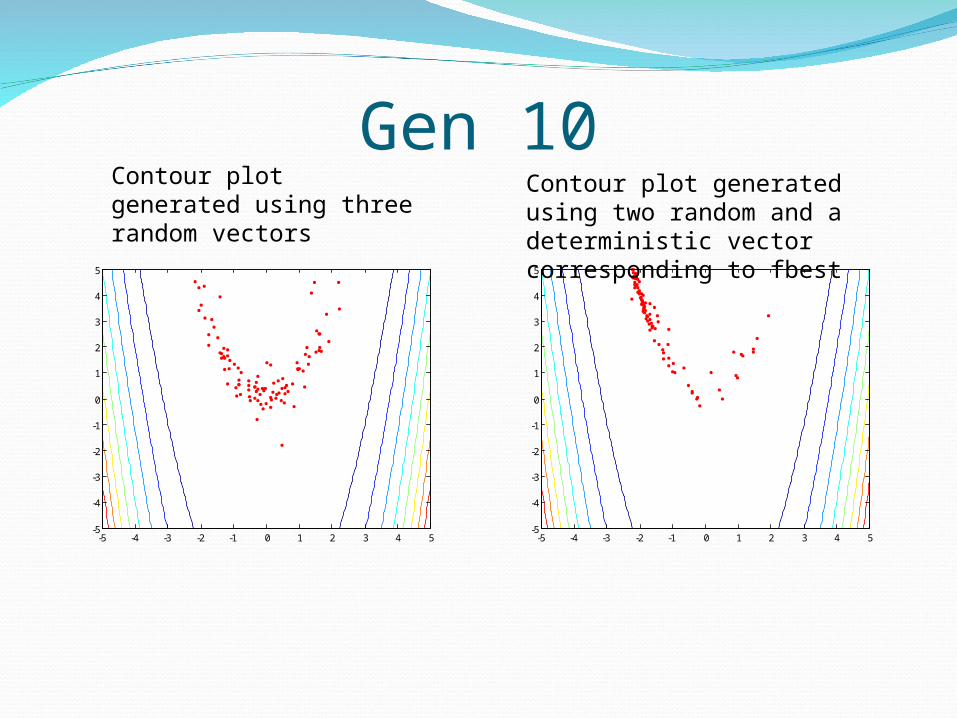
Gen 10
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
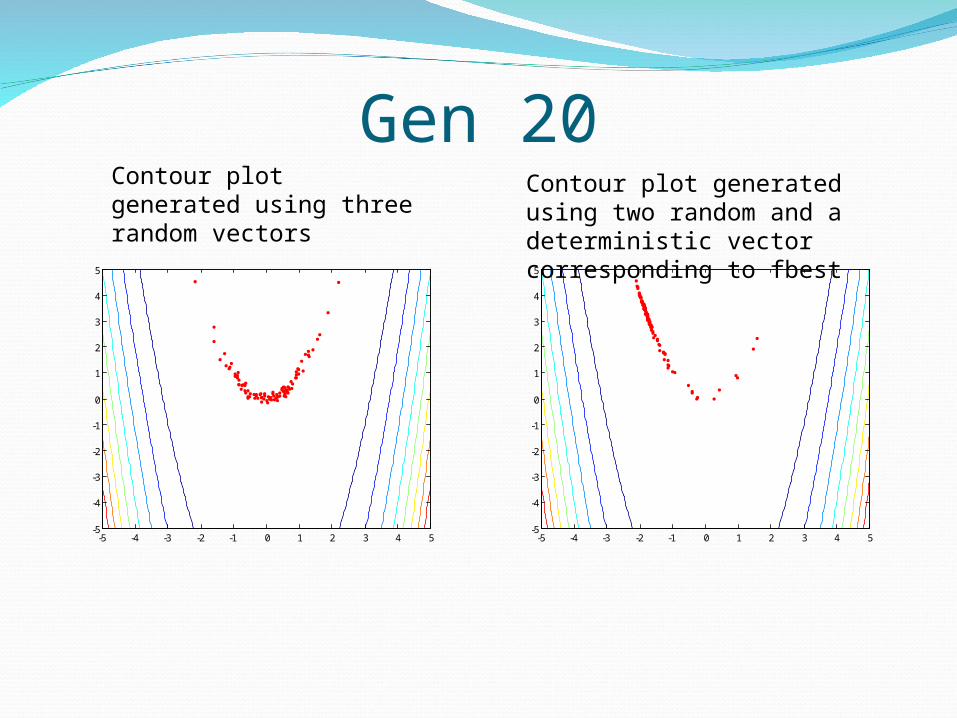
Gen 20
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
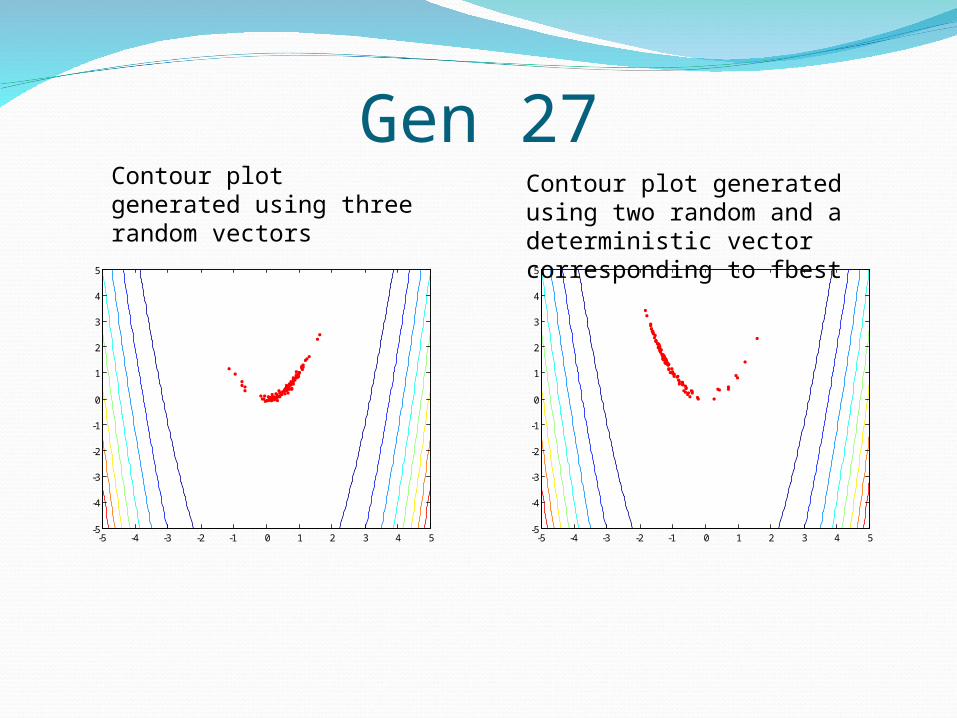
Gen 27
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
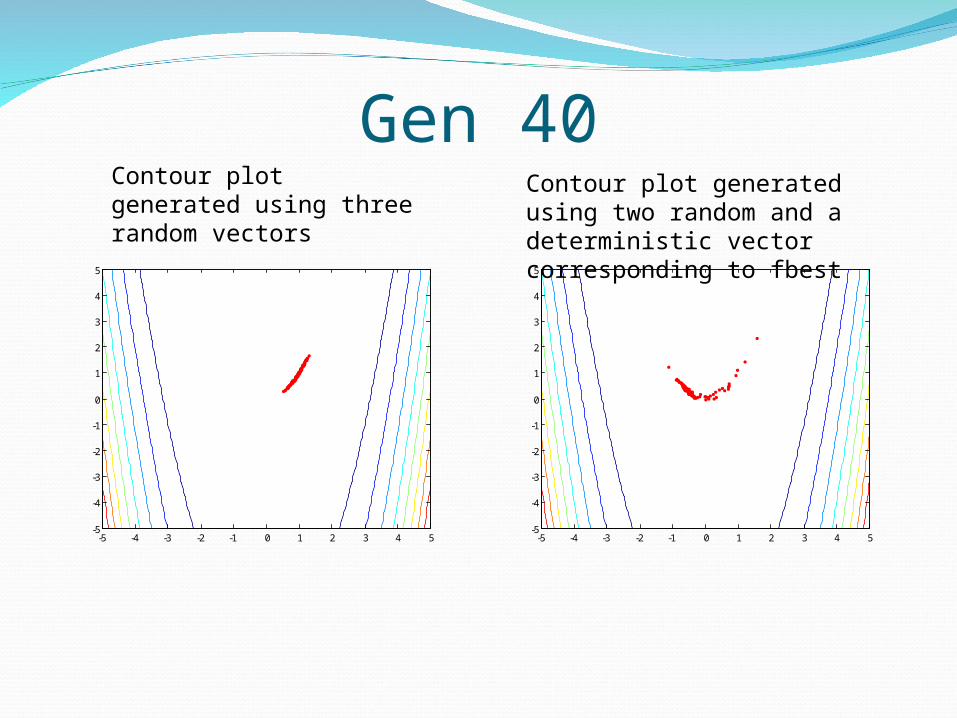
Gen 40
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
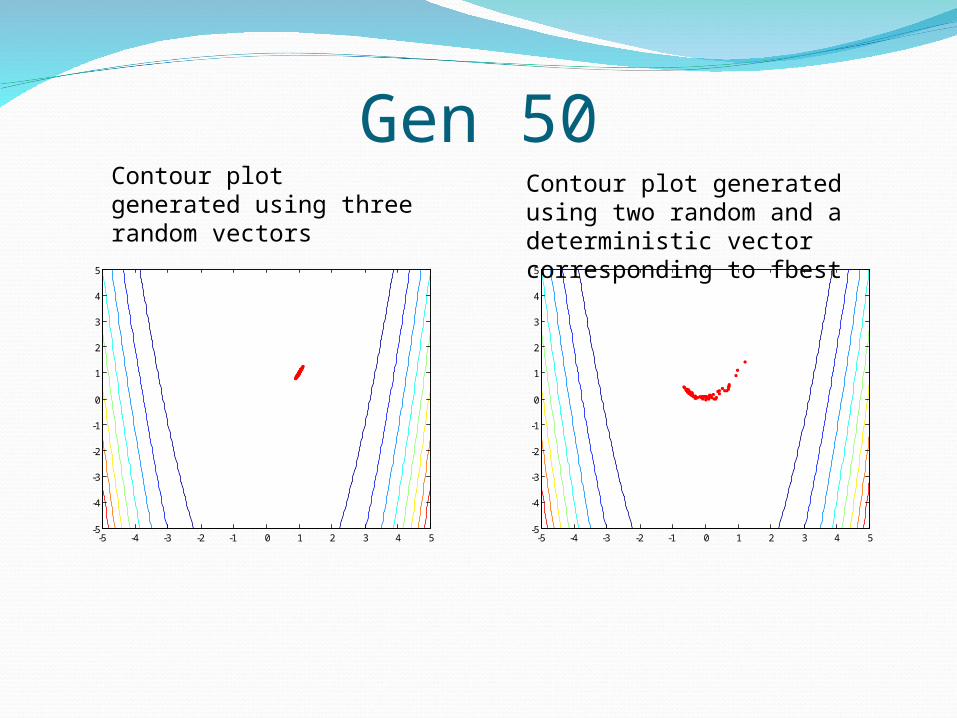
Gen 50
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
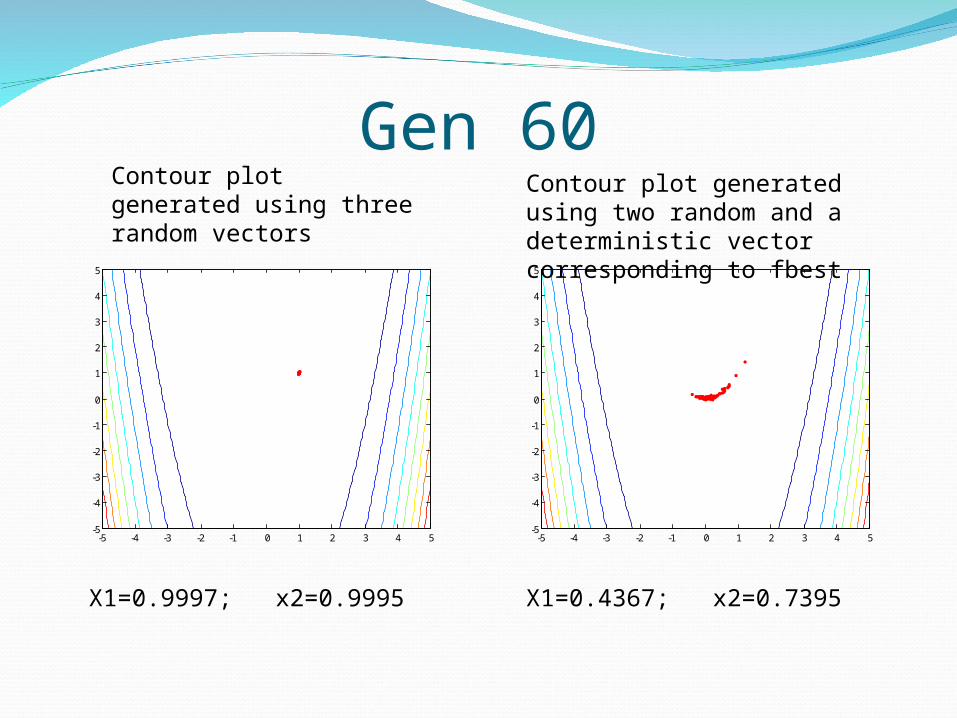
Gen 60
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
-5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
5
X1=0.9997; x2=0.9995 X1=0.4367; x2=0.7395
Contour plot generated using three random vectors
Contour plot generated using two random and a deterministic vector corresponding to fbest
Optimization with ConstraintsA general formulation for constrained
optimization is
Inequality ConstraintsMost often, inequality constraints are
implemented as penalty funcions.One common way to integrate constraint
viola-tions into an optimization task is to multiply each penalty by a weight, wm, and add the result to the objective function, f(x):
Importance of adding weightsWeights help normalize all penalties to the same
range. Without normalization, penalty function
contributions may differ by many orders of magnitude, leaving violations with small penalties underrepresented until those that generate large penalties become just as small.
When there are many constraints, the main drawback of the penalty approach is that pre-specified weights must be well chosen to keep the population from converging upon either infeasible or non-optimal vectors.
Drawbacks of Penalty functionsSchemes that sum penalty functions run the risk
that one penalty will dominate unless weights are correctly adjusted. In addition, the population can converge upon an infeasible region if its objective function values are much lower than those in feasible regions. It can even happen that no set of weights will work. Because weight selection tends to be a trial and error optimization problem in its own right, simpler direct constraint handling methods have been designed that do not require the user to “tune” penalty weights.
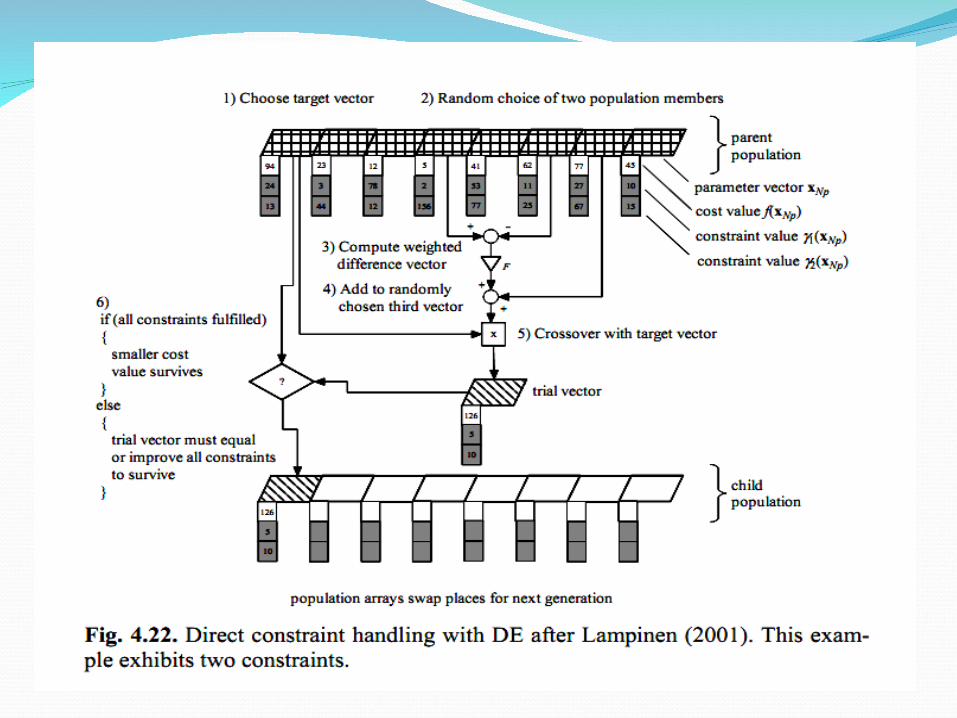
Direct Constraint HandlingIn simple terms, Lampinen’s criterion selects
the trial vector ui,g if: 1.ui,g satisfies all constraints and has a lower
or equal objective function value than xi,g, or 2.ui,g is feasible and xi,g is not, or 3.ui,g and xi,g are both infeasible, but ui,g does
not violate any constraint more than xi,g.
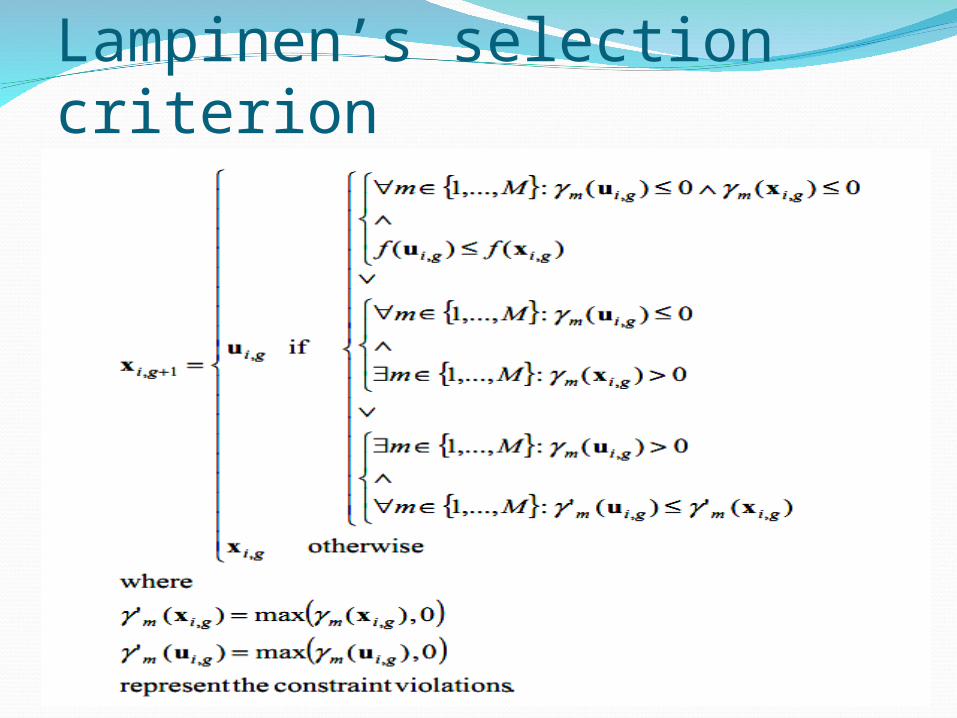
Lampinen’s selection criterion
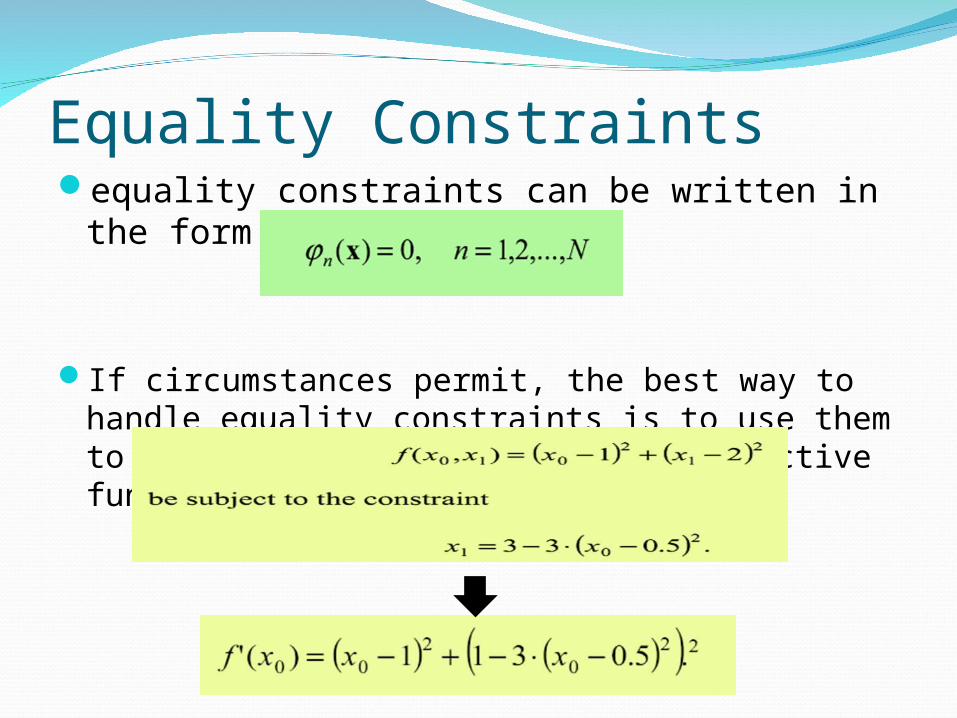
Equality Constraintsequality constraints can be written in the
form
If circumstances permit, the best way to handle equality constraints is to use them to eliminate variables from the objective function.
Eliminating variables ??Eliminating an objective function variable
with an equality constraint not only ensures that all vectors satisfy the constraint, but also reduces the problem’s dimension by 1.
In pactice, not all equality constraint equations can be solved for a term that also appears in the objective function. When it cannot be used to eliminate a variable, an equality constraint can be recast as a pair of inequality constraints.
Transformation into Inequality ConstraintsEliminating a variable is the only way to ensure
that a solution exactly satisfies an equality constraint.
Otherwise, the finite precision of floating-point number formats limits the degree to which an equality constraint can be satisfied.
It is more reasonable, therefore, to demand that an equality constraint violation be less than ε, where ε can be made as small as desired:
Penalty ApproachLike inequality constraints, equality
constraints can be transformed into cost terms that penalize the objective function. Equation 4.29 shows that either the absolute value or the square of ϕn(x) makes a suitable penalty.
When all constraints are fulfilled, the penalty term, like ε, becomes zero: