1 branching bisimulation congruence for probabilistic transition systems nikola trčka and sonja...
Post on 20-Dec-2015
216 views
TRANSCRIPT

1
Branching Bisimulation Congruence for Probabilistic Transition SystemsNikola Trčka
and
Sonja Georgievska

2
Labeled Transition Systems
Formalism for modeling of qualitative (functional) behavior
Directed graphs: nodes = states of the system labels on arrows = actions that the system can
perform
Example: a
b
c
3
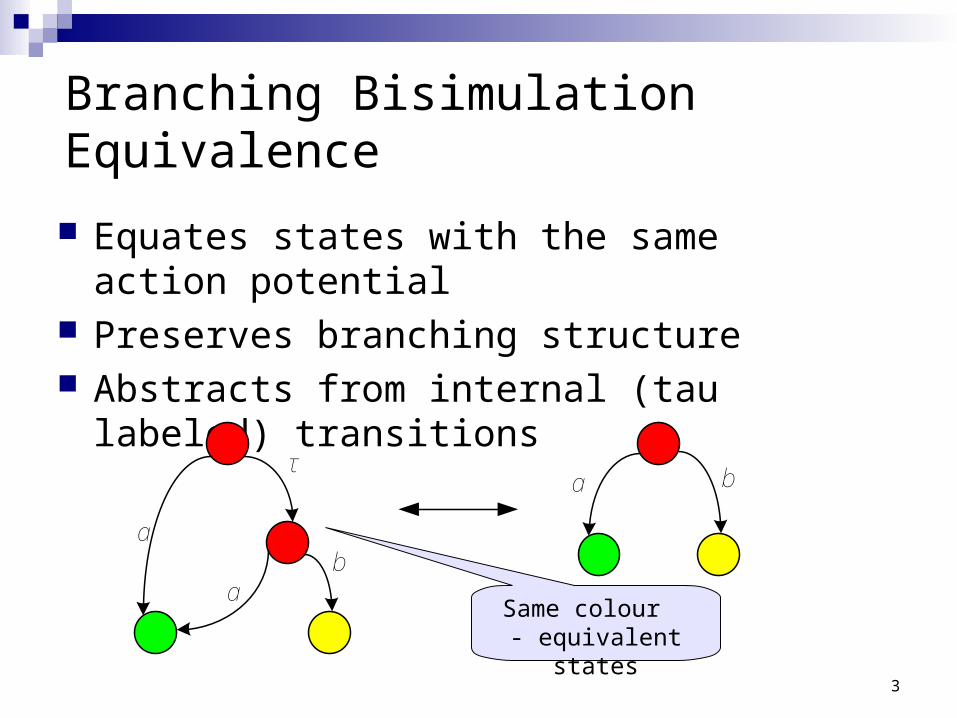
Branching Bisimulation Equivalence
Equates states with the same action potential Preserves branching structure Abstracts from internal (tau labeled) transitions
a
a
τ
b
a b
Same colour - equivalent states
4
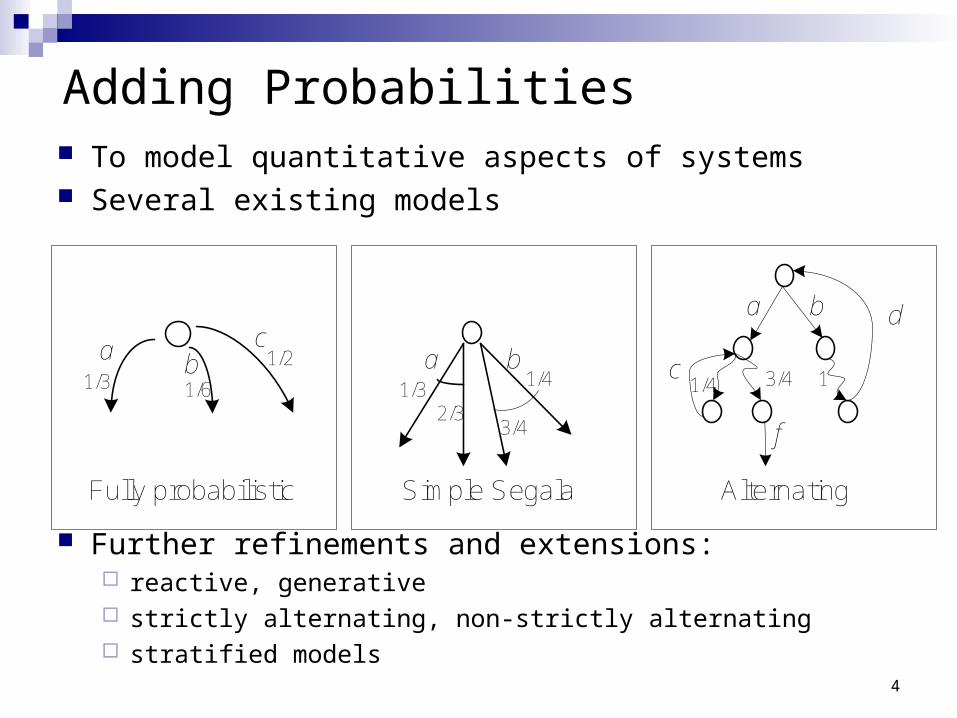
Adding Probabilities To model quantitative aspects of systems Several existing models
Further refinements and extensions: reactive, generative strictly alternating, non-strictly alternating stratified models
a bc
1/3 1/6
1/2
Fully probabilistic
a1/3
2/3
b1/4
3/4
Simple Segala
a b d
c1/4 3/4 1
Alternating
f

5
Our model: Probabilistic Transition System
Generalization of the alternating model: also allows consecutive probabilistic states
Orthogonal extension of both labeled transition systems and Markov chains
a c
1/2
1/21/3 2/3
1/6 5/6 a b
τ

6
Parallel composition Probabilistic choice resolved first
Parallel probabilistic choices are combined
b c
1/3 2/3
|| a =b||a
1/3 2/3
c||a
a b
1/3 2/3
|| =a||d
1/6 1/3
b||cc d
1/2 1/21/6
a||c
1/3
b||d

7
Branching bisimulation for probabilistic systems
1. Fully probabilistic systems [Baier and Hermanns, 1997]2. Strictly alternating model [Andova and Willemse, 2005]3. Non-alternating model [Segala and Lynch, 1994]
Main idea in all three definitions:
if s~t and then the probability of the set of all scheduled internal computations from t not leaving the class of s and ending in the class of s’ by doing the action a is 1.

8
Our goal
Define branching bisimulation for probabilistic transition systems that: is a congruence relationdoes not use the notion of schedulers is a conservative extension of branching
bisimulation for transition systems

9
Congruence problem Direct adaptation of branching bisimulation of [Andova and Willemse]
does not work
τ
1/2 1/2
1/2 1/2
a
a b
b
c
c
τ
1/21/2
a b
τ
1/2 1/2
a||c b||c
c1/2 1/2
a||c b||c
|| =
|| =
10
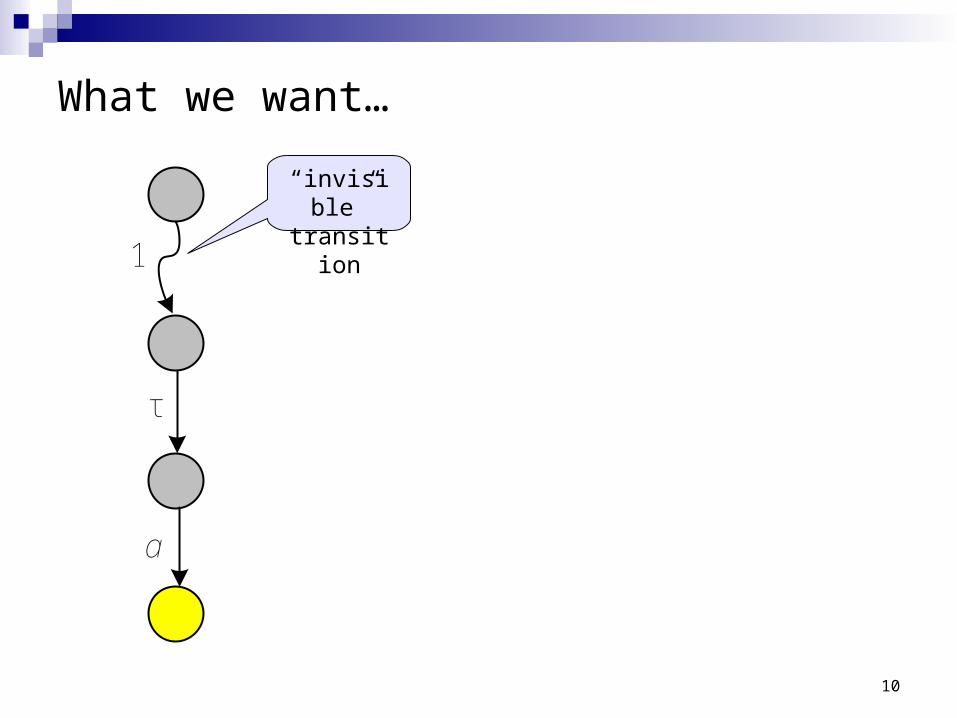
What we want…
τ
1
a
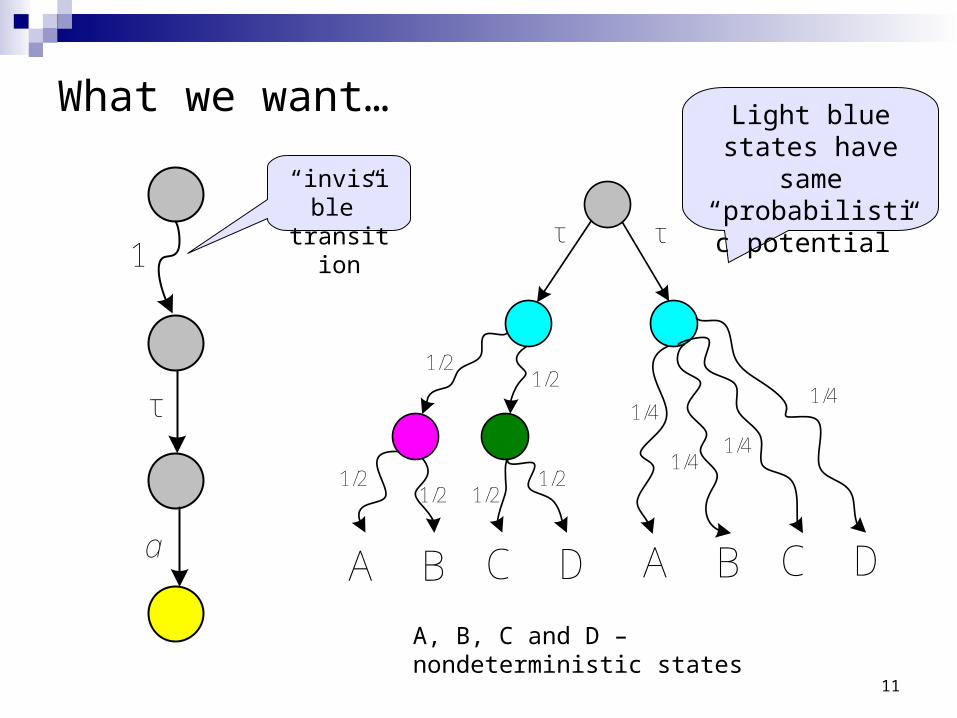
“invisible” transition
11
What we want…
τ τ
1/21/2
1/21/2
1/21/2
1/4
1/41/4
1/4
A B C D A B C D
A, B, C and D – nondeterministic states
τ
1
a
“invisible” transition
Light blue states have same
“probabilistic potential”

12
What we don’t want…
τ
1/2 1/2
b c
a
because of the priority of the probabilistic
choice in parallel composition

13
What we don’t want…
τ
1/2 1/2
b c
a
τ
1/2 1/2
b c
a
because of the priority of the probabilistic
choice in parallel composition
14
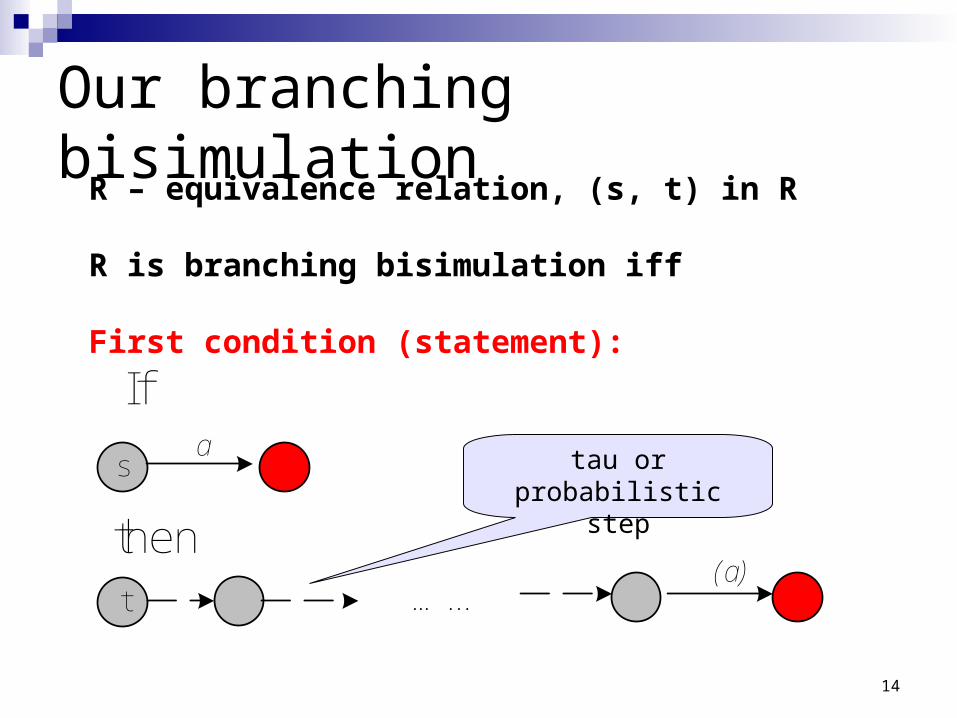
sa
t(a)
…...
then
If
Our branching bisimulationR – equivalence relation, (s, t) in R
R is branching bisimulation iff
First condition (statement):
tau or probabilistic step
15
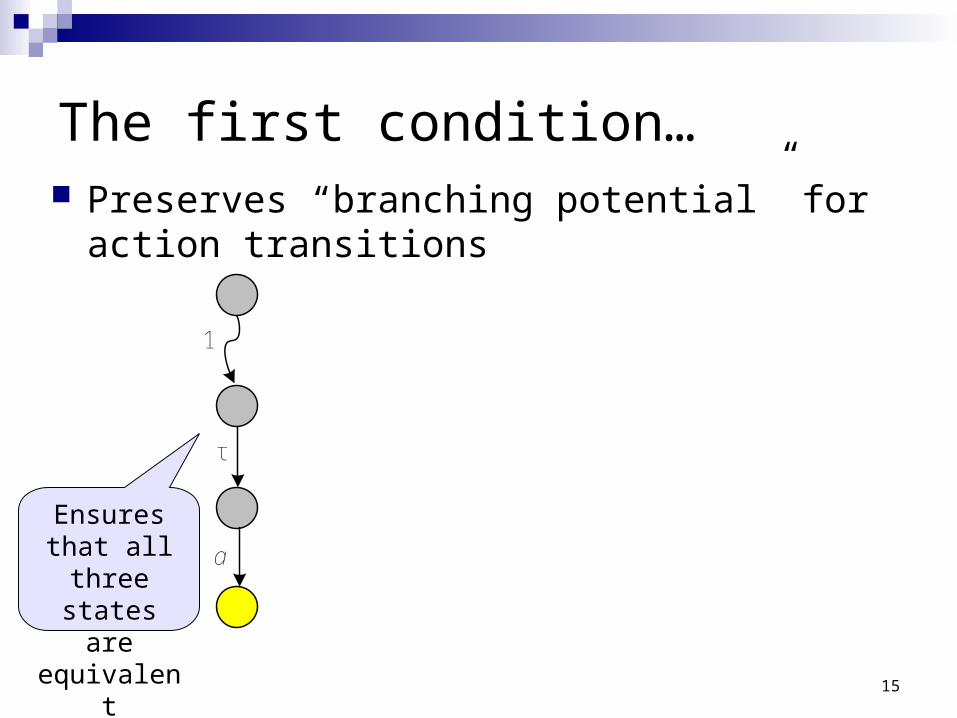
The first condition… Preserves “branching potential” for action
transitions
Ensures that all three states are equivalent
τ
1
a
16
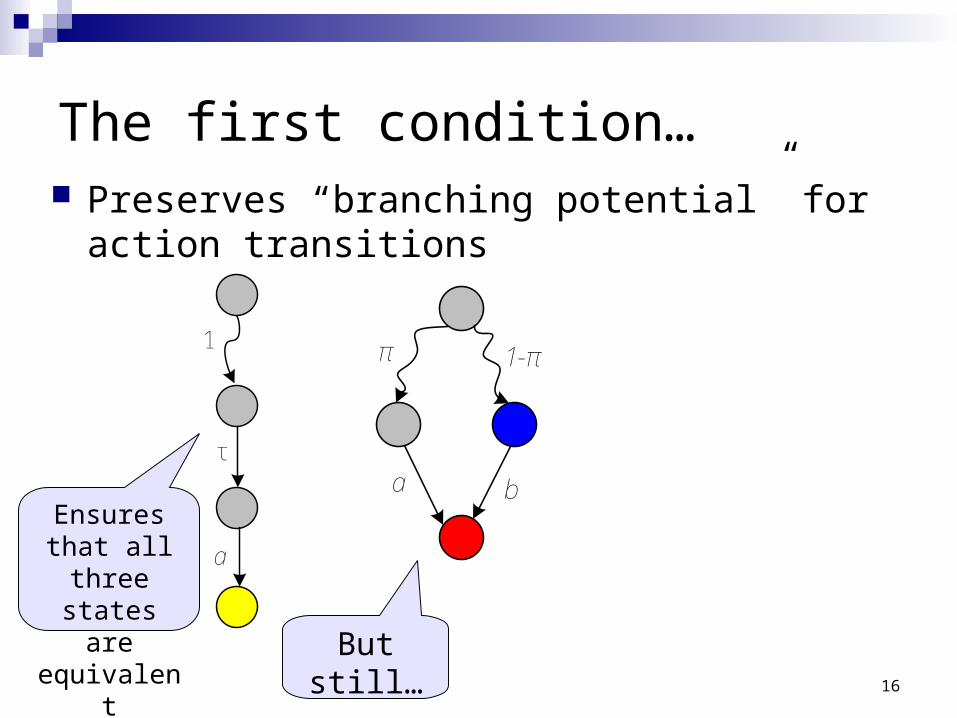
The first condition… Preserves “branching potential” for action
transitions
Ensures that all three states are equivalent
But still…
τ
1
a
a b
π 1-π

17
The first condition… Preserves “branching potential” for action
transitions
Ensures that all three states are equivalent
But still…
τ
1
a
a b
π 1-πτ
1/2 1/2
b c
a
...and still

18
Second condition (preliminaries):
Define
“all probabilities are left unchanged, except that a nondeterministic state reaches itself with probability one”
Nondeterministic states
prob. trans.

19
Second condition - preliminaries
Cesaro limes of P:
Π(s,t) – “probability that s will ‘end up’ in t (without performing actions!)”
A, B, C and D - nondeterministic
“Cesaro” probabilities
1/21/2
1/21/2 1/2
A B C D
1/4
1/4
1/4
A B C D
1/2 1/2 1/2
1/21/4
1/2
20
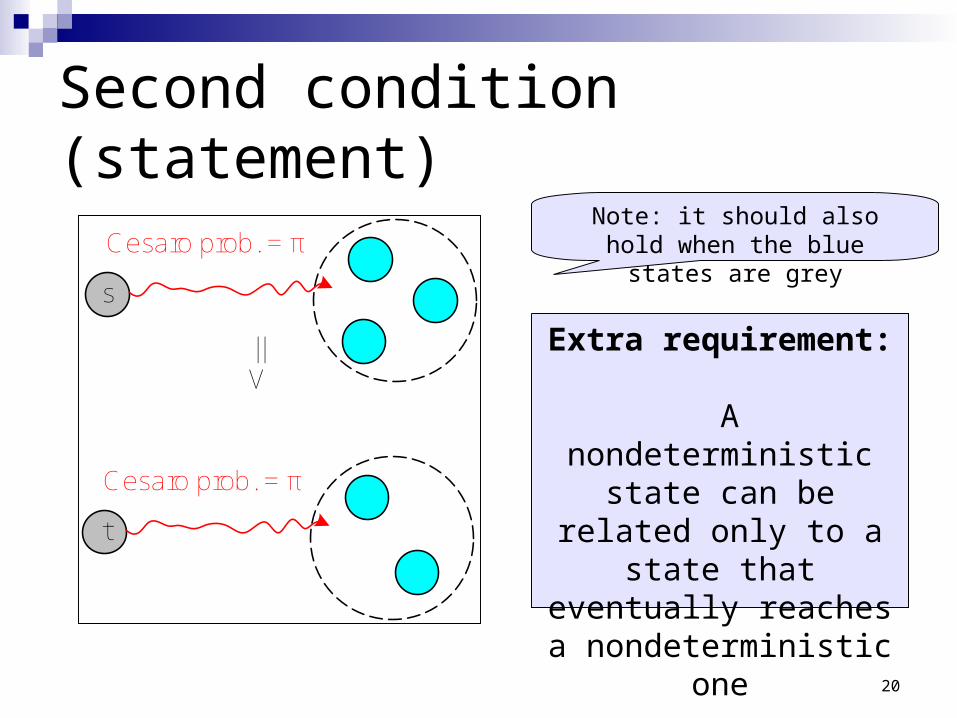
Second condition (statement)
s
||V
Cesaro prob. = π
t
Cesaro prob. = π
Extra requirement:
A nondeterministic state can be related only to a
state that eventually reaches a
nondeterministic one
Note: it should also hold when the blue states are grey

21
The second condition…
τ
1/2 1/2
b c
a
This state reaches its class with Cesaro probability 1…
…which is not true for this state

22
The second condition…
τ
1/2 1/2
b c
a
a b
π 1-π
τ1
“A nondeterministic state can be related only to a state that
eventually reaches a nondeterministic one”

23
What else is equivalent…The light blue
states reach same classes with same
Cesaro probabilities
τ τ
1/21/2
1/21/2
1/21/2
1/4
1/41/4
1/4
A B C D A B C D

24
What else is equivalent or not…
τ
1/2 1/2τ
a b
τ
τ
1/2 1/2τ
a b

25
Main results
We defined a branching bisimulation for a general model that includes probabilistic and nondeterministic states
It is congruence It is stronger than [Andova and Willemse, 2005]
when applied to the strictly alternating model

26
Questions?