bisimulation relation a lecture over e. hagherdi, p. tabuada, g. j. pappas bisimulation relation for...
Post on 19-Dec-2015
215 views
TRANSCRIPT
Bisimulation Relation
A lecture overE. Hagherdi, P. Tabuada, G. J. Pappas
Bisimulation relation for dynamical, control, and hybrid systems
Rafael WisniewskiAalborg University
Ph.D. course November 2005
Please ask as much as possible. I would be happy for all relevant to the topic questions.

Labeled Transition Systems
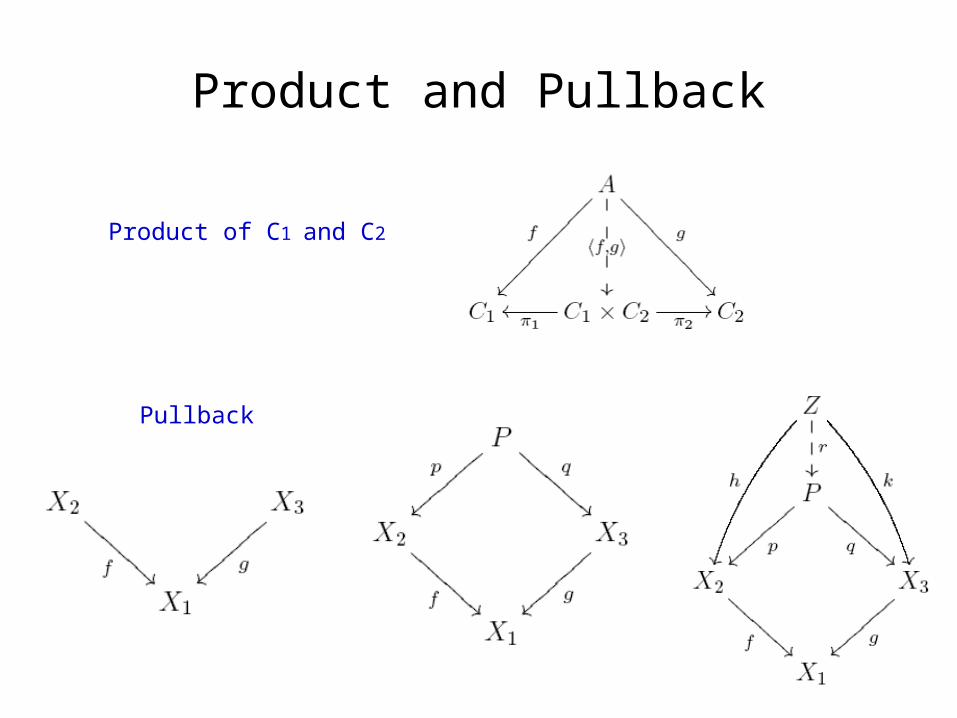
Product and Pullback
Product of C1 and C2
Pullback

Product of Transition Systems

Strong Bisimulation
Whenever commutes then commutes
Open Maps:

BranL Open Maps
BranL is a full subcategory of TL of all synchrinization trees with a single finite branch.
P-bisimilarity:

Generalization of P-open mapsWe generalize P-open maps to the category Dyn of dynamical systems and Hyb the category of hybrid dynamical systems.
The path category P as the full subcategory of Dynwith objects P : I → TI, where P(t) = (t, 1) and I is an open interval of Rcontaining the origin.
Morphism:

P-open Maps
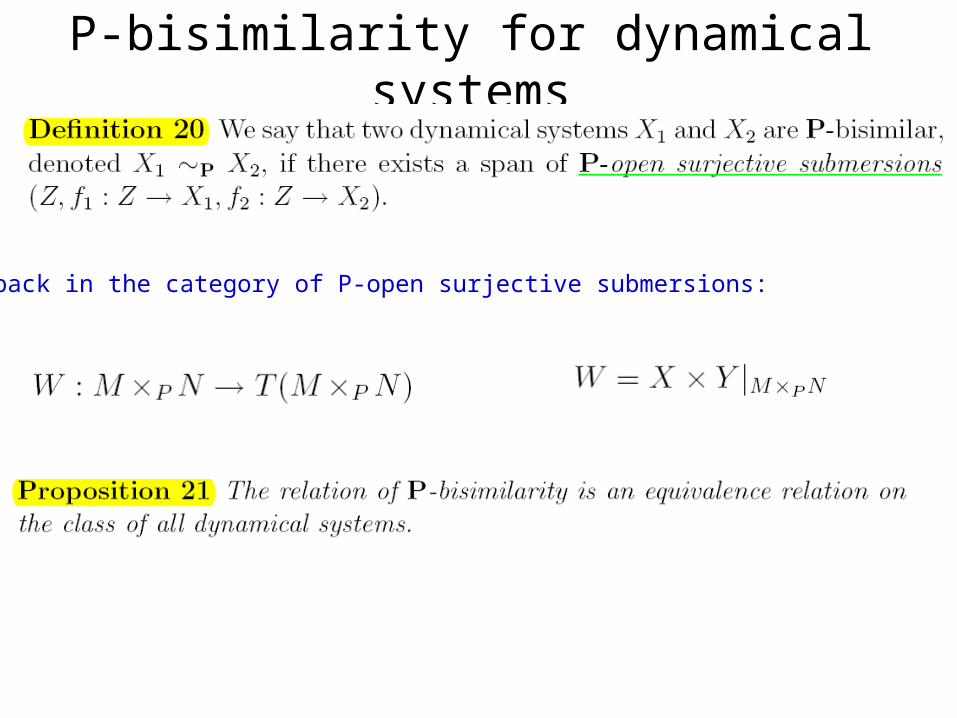
P-bisimilarity for dynamical systems
Pullback in the category of P-open surjective submersions:

Bisimilarity of Dynamical Systems

Example
Consider the vector field X on M = RR2 defined
Also consider the vector field Y on N = R R defined by
is a Dyn-morphismThen
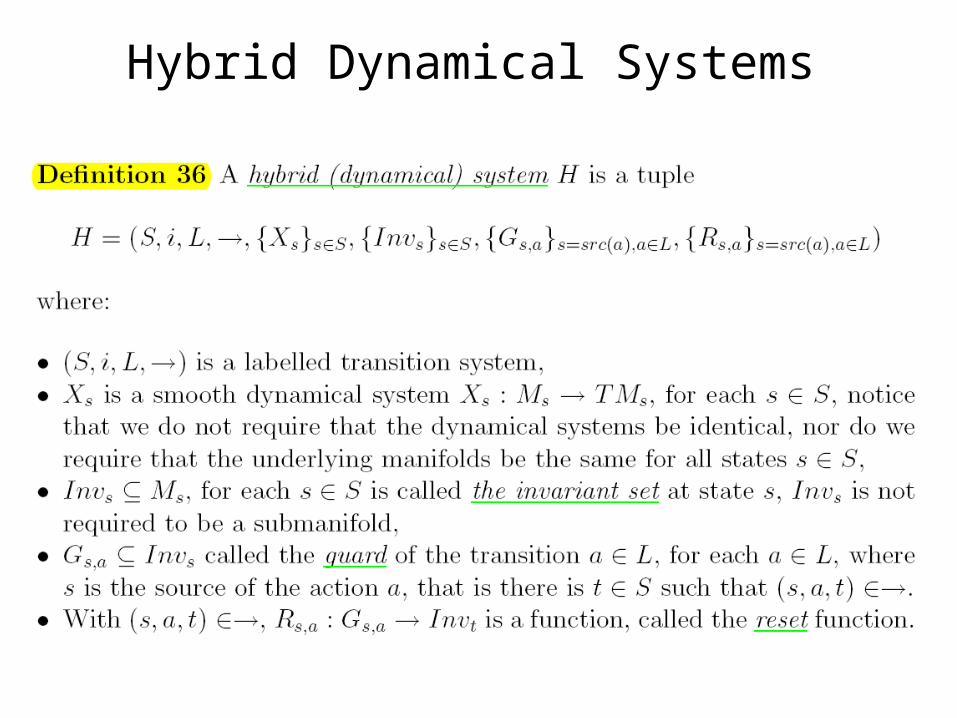
Hybrid Dynamical Systems

Category HybRecall a time transition system from Henzinger
The state space is
Transition relation like in Henzinger

Path Category in HybThe path category P is the full subcategory of Hyb:
t0 t1 t2 tk-1 tk
dx/dt = 1

Example of a pathConsider a path
This path is represented by the path object P which has states l0, l1, l2
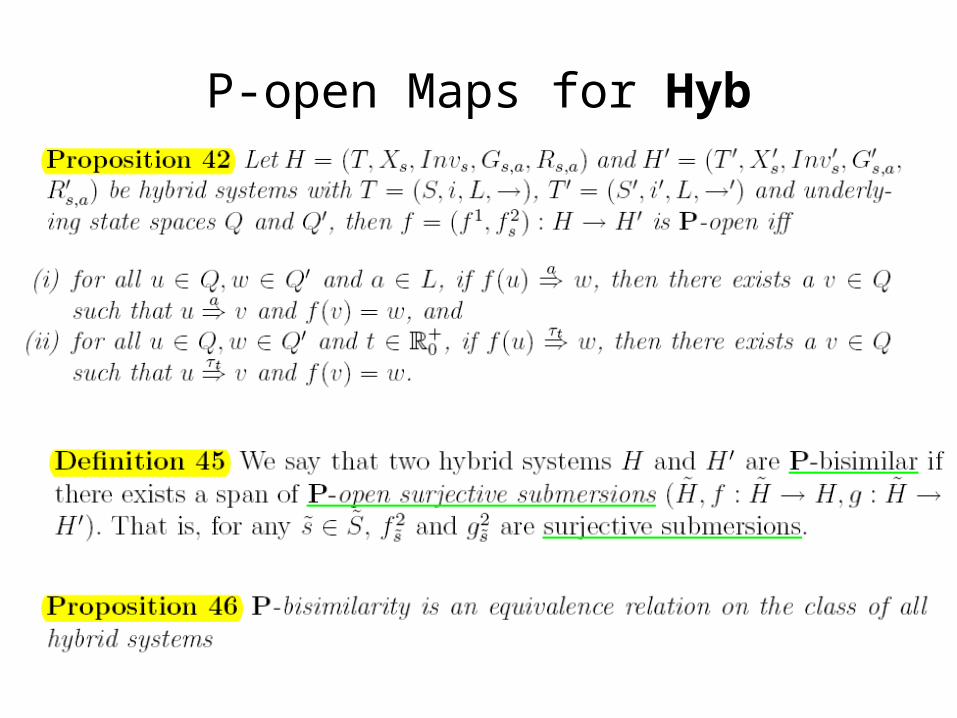
P-open Maps for Hyb

Characterization of bisimulation in Hyb
is said to be a bisimulation relation iff for all
implies
▒▒

Bisimulation Characterization

Future Work• Extension of the bisimulation notion from the article from timed transition systems to time abstract transition systems. This can be done by identify a whole flow line with a point in the space of flow lines.
• The strong simulation is too strong equivalence relation on dynamical systems is too strong. Try to use weaker equivalence relation some form of topological equivalency.
On Friday 18th Nov. try to understand the definitions and go through proofs in the section dealing with the dynamical systems.If you understand P-open maps and bisimulation in the category of dynamical systems the generalization to hybrid systems seems natural.