wolfgang juchmann, velodyne lidar
TRANSCRIPT


True 3D Sensors capturing
a 3D World in real-time
compact
affordable
lightweight
VLP-16
HDL-32E

3
Pu c k
COMING SOON
Affo
r
dable - $7999*
• 16 Channels
• 100+ Meters
• 300 000 Pts/sec
• Dual Returns
• Protective Design
• ± 15° Vertical FOV
• 360° Horizontal FOV
• 100mm x 65mm
• 600 grams
• Low Power Consumption
3D - Real Time - LiDAR
*Introductory pricing and preliminary specific
a
tions, subject to change.
For more info contact: [email protected]

4

5 - 5 -

6 - 6 -

7
Solid Surface Detection
• Last Return (red)
• Solid Surface
• Strongest Return (blue)
• Transparent Curtain
- 7 -

8
LiForest.com
Aibotix
Phoenix-Aerial
LiDAR-America
Geo-Info Technologies

• Founded in 2013 by members of UC-Merced
• Offices in USA, Hong-Kong & China
• Focus on Forest Management:
– Forestry customized software
– LiDAR processing services
– UAV based LiDAR
• Website: www.LiForest.com
• Contact: [email protected]
9

www.LiForest.com

Photo From Panthers PeakSimulation Using Lidar
www.liforest.com
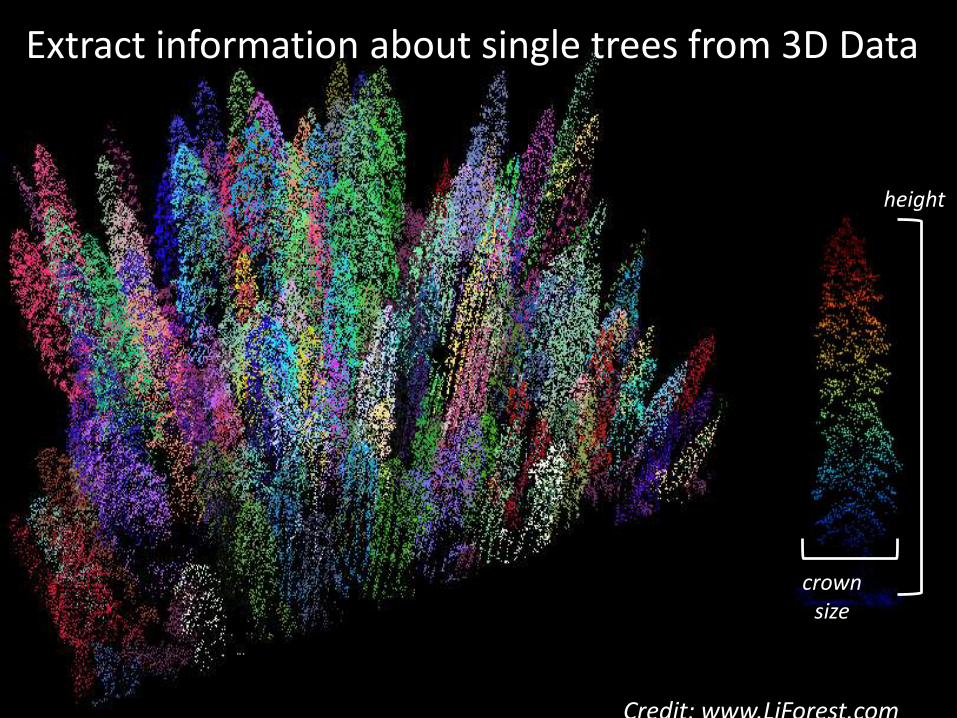
Can we extract information about single trees from the point cloud?
Extract information about single trees from 3D Data
height
crownsize
Credit: www.LiForest.com

13

14
• First FAA-Approved UAV in US on land and water
• Commercially operating at Alaska North Slope
– Pipeline Inspections
– Bridge Maintenance
– Road Surveying
– Pad Monitoring
– Utility Inspection
• Puma payload includes
– Velodyne HDL-32E
– GPS/IMU
– Data Recorder
• Vertical precision: ~2cm using control points
• Flight and recording time: 2+ hours continuously
• Measurements of distances and reflectivities
• Fusion of LiDAR &Photogrammetry for detailed 3D model
• Data-rich 3D model for detailed analysis of assets

15

16

• Stable Sensor Payload: SSP-360
– Gimbaled LiDAR and camera options
– < 10lbs (5kg) payload with Velodyne Puck
– Stable, Focus on Subject, Aircraft Agnostic
• XactSense Max8: Folding Utility Octocopter
– 20lbs (10kg) lift
– Up to 25min Flight Time
– Folding Design, fits in luggage
• GPS-free LiDAR Stitching (SLAM)
– Indoor Mapping capable
– Wireless Data Transmission


19
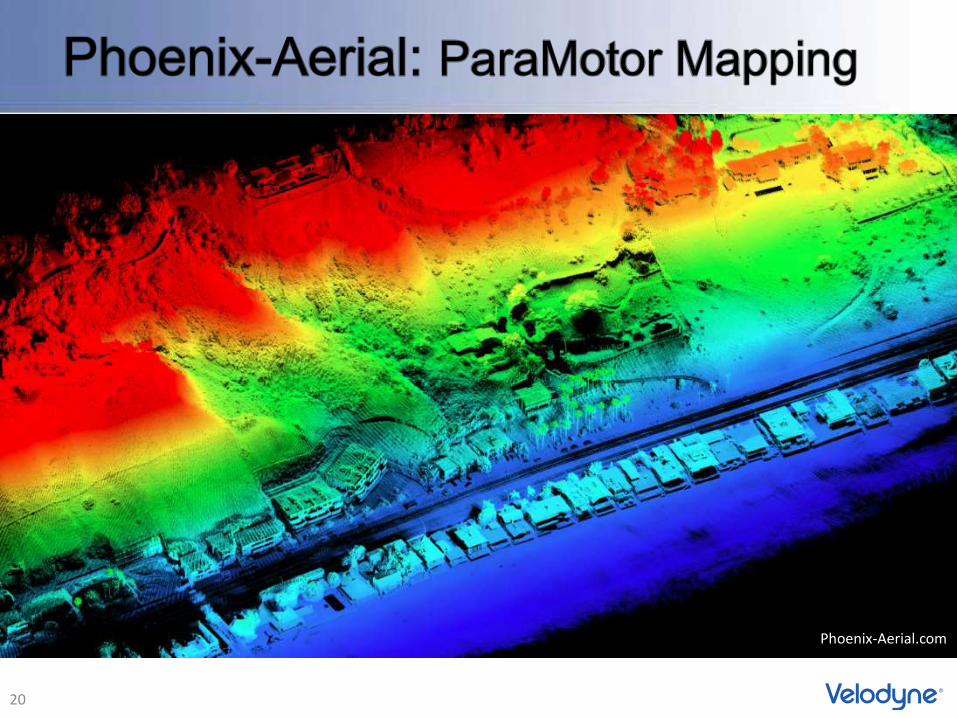
20
Phoenix-Aerial.com

21

22
Thank You
- 23 -
Wolfgang Juchmann
345 Digital Drive,
Morgan Hill, CA 95037, USA
phone: +1 408 465 2802
- 24 -

- 25 -
single beam shadow
Only two sides of houses visible in single
pass
house in shadow
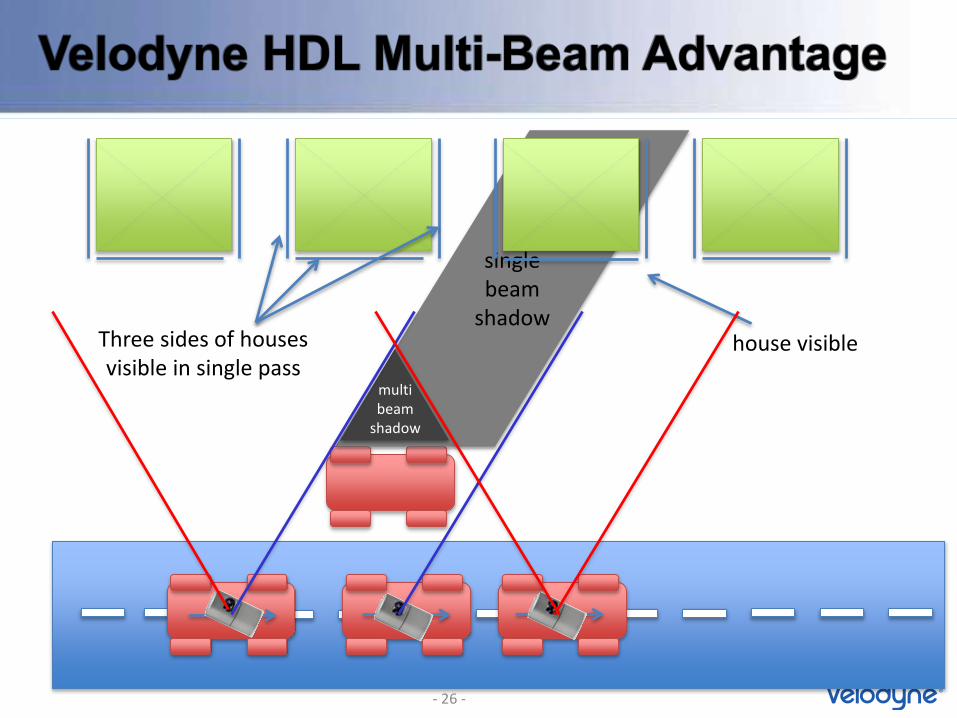
single beam
shadow
multi beam
shadow
Three sides of houses visible in single pass
house visible
- 26 -

27
Single Beam LiDAR – Large Shadow Multi-Beam HDL-32E – Minimal Shadow
Minimized Shadows due to Multiple Beams

Flying the VelodyneHDL-32E
Calculating
Point Coverage Density

Forward Velocity
Forward Swath (Y Axis)
Azimuth Swath (X Axis)
Altitude
Sensor RotationSpeed
10°
20
°20
°
ForwardOffset
Position of first laser sweepZero Meter
Line
+X
+Z
+Y
Target Area

• Given– 40m Altitude
– 5Hz Rotation Speed • Angular Resolution at 5Hz = 0.083°Flight Direction
+Y (out of page)
+Y
+Z
+XAltitude – 40m
Azimuth Swath – 5m
F°F°=
(Azimuth Swath/2) AltitudeTan-1 ( )
F = 3.576°
∴ Points / Azimuth Sweep
86 points = 2*F°/0.083°/point
86 points / sweep

- 31 -
Input Controls
Results
Constants & Computed Intermediate Values
- 31 -
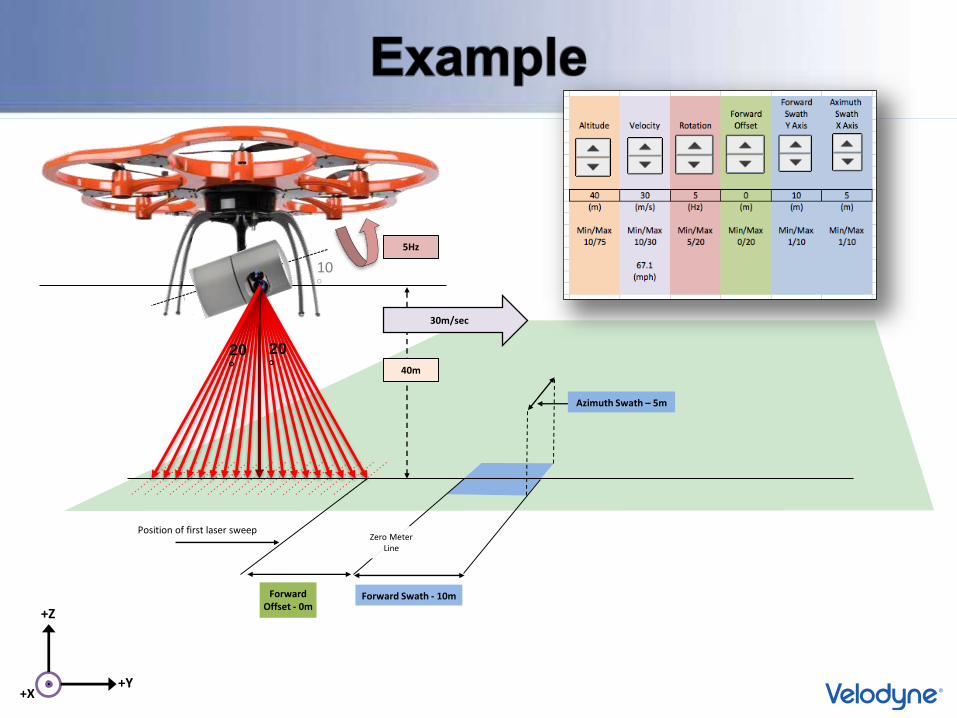
Forward Swath - 10m
Azimuth Swath – 5m
40m
10°
20
°20
°
ForwardOffset - 0m
Position of first laser sweepZero Meter
Line
+X
+Z
+Y
5Hz
30m/sec

+X
+Z
+Y
Forward Swath - 10m
Azimuth Swath – 5m
Zero MeterLine
Rotation Speed: 5HzVelocity: 30m/sAltitude: 40m
10°
20
°20
°
Position of first laser sweep
Laser #s on target area: 1
Total Sweeps = 1

+X
+Z
+Y
Forward Swath - 10m
Azimuth Swath – 5m
Zero MeterLine
Rotation Speed: 5HzVelocity: 30m/sAltitude: 40m
Position of first laser sweep
10°
20
°20
°
Laser #s on target area: 1-7
Total Sweeps = 8

+X
+Z
+Y
Forward Swath - 10m
Azimuth Swath – 5m
Zero MeterLine
Rotation Speed: 5HzVelocity: 30m/sAltitude: 40m
Position of first laser sweep
10°
20
°20
°
Laser #s on target area: 3-13
Total Sweeps = 19
+X
+Z
+Y
Forward Swath - 10m
Azimuth Swath – 5m
Zero MeterLine
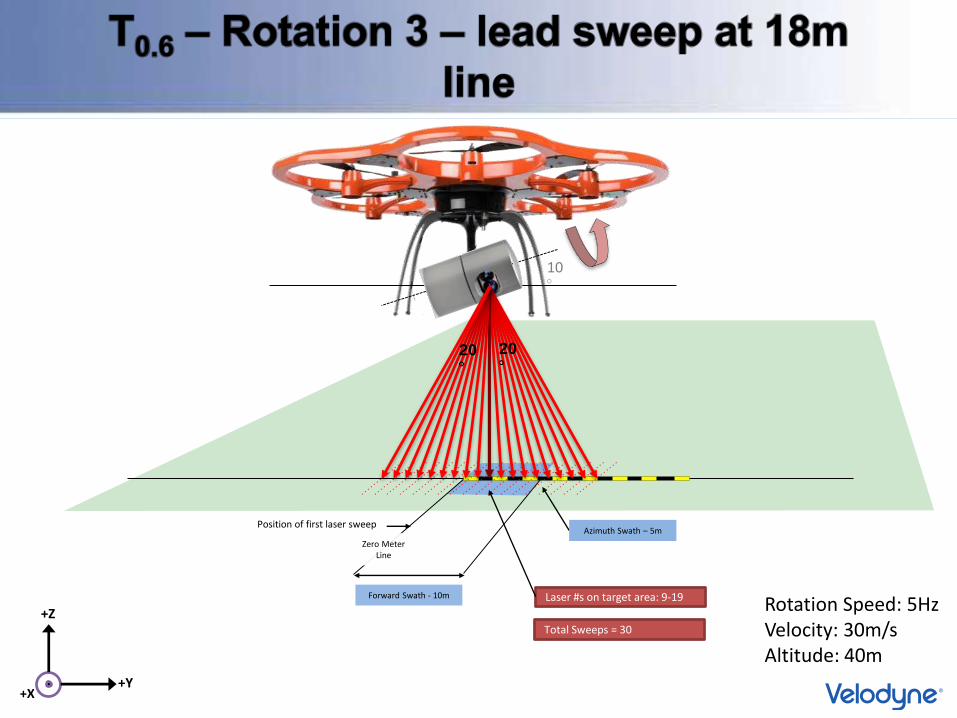
Rotation Speed: 5HzVelocity: 30m/sAltitude: 40m
Position of first laser sweep
10°
20
°20
°
Laser #s on target area: 9-19
Total Sweeps = 30

+X
+Z
+Y
Forward Swath - 10m
Azimuth Swath – 5m
Zero MeterLine
Rotation Speed: 5HzVelocity: 30m/sAltitude: 40m
Position of first laser sweep
10°
20
°20
°
Laser #s on target area: 15-25
Total Sweeps = 41

+X
+Z
+Y
Forward Swath - 10m
Azimuth Swath – 5m
Zero MeterLine
Rotation Speed: 5HzVelocity: 30m/sAltitude: 40m
Position of first laser sweep
10°
20
°20
°
Laser #s on target area: 21-31
Total Sweeps = 52

+X
+Z
+Y
Forward Swath - 10m
Azimuth Swath – 5m
Zero MeterLine
Rotation Speed: 5HzVelocity: 30m/sAltitude: 40m
Position of first laser sweep
10°
20
°20
°
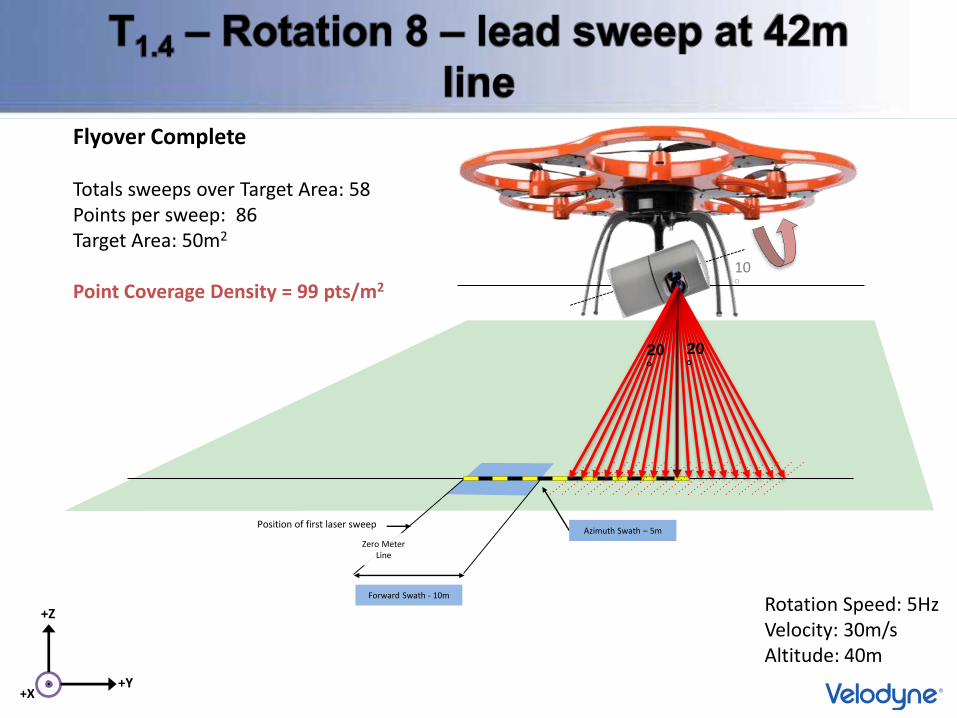
Laser #s on target area: 27-32
Total Sweeps = 58
Azimuth Swath – 5m
Zero MeterLine
Position of first laser sweep
10°
20
°20
°
+X
+Z
+Y
Forward Swath - 10m
Rotation Speed: 5HzVelocity: 30m/sAltitude: 40m
Flyover Complete
Totals sweeps over Target Area: 58Points per sweep: 86Target Area: 50m2
Point Coverage Density = 99 pts/m2