wing design optimization for a long-endurance uav using...
TRANSCRIPT

Copyright ⓒ The Korean Society for Aeronautical & Space SciencesReceived: December 28, 2015 Revised: June 7, 2016 Accepted: August 26, 2016
423 http://ijass.org pISSN: 2093-274x eISSN: 2093-2480
PaperInt’l J. of Aeronautical & Space Sci. 17(3), 423–431 (2016)DOI: http://dx.doi.org/10.5139/IJASS.2016.17.3.423
Wing Design Optimization for a Long-Endurance UAV using FSI Analysis and the Kriging Method
Seok-Ho Son*R&D Engineering Team, PIDO TECH Inc., Seoul 04763, Republic of Korea
Byung-Lyul Choi**Engineering Consulting Team, PIDO TECH Inc., Seoul 04763, Republic of Korea
Won-Jin Jin***Depart. of Aviation Maintenance Engineering, Far East University, Chungbuk 27601, Republic of Korea
Yung-Gyo Lee**** and Cheol-Wan Kim*****Aerodynamics Team, Korea Aerospace Research Inst., Dajeon 34133, Republic of Korea
Dong-Hoon Choi******School of Mechanical Engineering, Hanyang University, Seoul 04763, Republic of Korea
Abstract
In this study, wing design optimization for long-endurance unmanned aerial vehicles (UAVs) is investigated. The fluid-
structure integration (FSI) analysis is carried out to simulate the aeroelastic characteristics of a high-aspect ratio wing for a
long-endurance UAV. High-fidelity computational codes, FLUENT and DIAMOND/IPSAP, are employed for the loose coupling
FSI optimization. In addition, this optimization procedure is improved by adopting the design of experiment (DOE) and
Kriging model. A design optimization tool, PIAnO, integrates with an in-house codes, CAE simulation and an optimization
process for generating the wing geometry/computational mesh, transferring information, and finding the optimum solution.
The goal of this optimization is to find the best high-aspect ratio wing shape that generates minimum drag at a cruise condition
of CL = 1.0. The result shows that the optimal wing shape produced 5.95 % less drag compared to the initial wing shape.
Key words: Long endurance UAV(unmanned aerial vehicle), CFD(computational fluid dynamics), FSI(fluid-structure integration)
analysis, Design optimization, Kriging method
Nomenclature
α : Angle of attack
2
addition, this optimization procedure is improved by adopting the design of experiment (DOE) and
Kriging model. A design optimization tool, PIAnO, integrates with an in-house codes, CAE
simulation and an optimization process for generating the wing geometry/computational mesh,
transferring information, and finding the optimum solution. The goal of this optimization is to find the
best high-aspect ratio wing shape that generates minimum drag at a cruise condition of CL = 1.0. The
result shows that the optimal wing shape produced 5.95 % less drag compared to the initial wing
shape.
Key words: Long endurance UAV (unmanned aerial vehicle), CFD (computational fluid dynamics),
FSI (fluid-structure integration) analysis, Design optimization, Kriging method
Nomenclature
: Angle of attack
: Coefficient of regression
CL: Coefficient of drag
CD: Coefficient of lift
f x : Global model
: Dihedral angle
: Taper ratio
r : Correlation vector
R : Correlation function
R : Correlation matrix
V : Velocity (m/s)
x : Design variables
y x : Exact response model
y x : Approximated response model
: Coefficient of regression
CL: Coefficient of drag
CD: Coefficient of lift
2
addition, this optimization procedure is improved by adopting the design of experiment (DOE) and
Kriging model. A design optimization tool, PIAnO, integrates with an in-house codes, CAE
simulation and an optimization process for generating the wing geometry/computational mesh,
transferring information, and finding the optimum solution. The goal of this optimization is to find the
best high-aspect ratio wing shape that generates minimum drag at a cruise condition of CL = 1.0. The
result shows that the optimal wing shape produced 5.95 % less drag compared to the initial wing
shape.
Key words: Long endurance UAV (unmanned aerial vehicle), CFD (computational fluid dynamics),
FSI (fluid-structure integration) analysis, Design optimization, Kriging method
Nomenclature
: Angle of attack
: Coefficient of regression
CL: Coefficient of drag
CD: Coefficient of lift
f x : Global model
: Dihedral angle
: Taper ratio
r : Correlation vector
R : Correlation function
R : Correlation matrix
V : Velocity (m/s)
x : Design variables
y x : Exact response model
y x : Approximated response model
: Global model
Γ : Dihedral angle
λ : Taper ratio
2
addition, this optimization procedure is improved by adopting the design of experiment (DOE) and
Kriging model. A design optimization tool, PIAnO, integrates with an in-house codes, CAE
simulation and an optimization process for generating the wing geometry/computational mesh,
transferring information, and finding the optimum solution. The goal of this optimization is to find the
best high-aspect ratio wing shape that generates minimum drag at a cruise condition of CL = 1.0. The
result shows that the optimal wing shape produced 5.95 % less drag compared to the initial wing
shape.
Key words: Long endurance UAV (unmanned aerial vehicle), CFD (computational fluid dynamics),
FSI (fluid-structure integration) analysis, Design optimization, Kriging method
Nomenclature
: Angle of attack
: Coefficient of regression
CL: Coefficient of drag
CD: Coefficient of lift
f x : Global model
: Dihedral angle
: Taper ratio
r : Correlation vector
R : Correlation function
R : Correlation matrix
V : Velocity (m/s)
x : Design variables
y x : Exact response model
y x : Approximated response model
: Correlation vector
R : Correlation function
2
addition, this optimization procedure is improved by adopting the design of experiment (DOE) and
Kriging model. A design optimization tool, PIAnO, integrates with an in-house codes, CAE
simulation and an optimization process for generating the wing geometry/computational mesh,
transferring information, and finding the optimum solution. The goal of this optimization is to find the
best high-aspect ratio wing shape that generates minimum drag at a cruise condition of CL = 1.0. The
result shows that the optimal wing shape produced 5.95 % less drag compared to the initial wing
shape.
Key words: Long endurance UAV (unmanned aerial vehicle), CFD (computational fluid dynamics),
FSI (fluid-structure integration) analysis, Design optimization, Kriging method
Nomenclature
: Angle of attack
: Coefficient of regression
CL: Coefficient of drag
CD: Coefficient of lift
f x : Global model
: Dihedral angle
: Taper ratio
r : Correlation vector
R : Correlation function
R : Correlation matrix
V : Velocity (m/s)
x : Design variables
y x : Exact response model
y x : Approximated response model
: Correlation matrix
V : Velocity (m/s)
2
addition, this optimization procedure is improved by adopting the design of experiment (DOE) and
Kriging model. A design optimization tool, PIAnO, integrates with an in-house codes, CAE
simulation and an optimization process for generating the wing geometry/computational mesh,
transferring information, and finding the optimum solution. The goal of this optimization is to find the
best high-aspect ratio wing shape that generates minimum drag at a cruise condition of CL = 1.0. The
result shows that the optimal wing shape produced 5.95 % less drag compared to the initial wing
shape.
Key words: Long endurance UAV (unmanned aerial vehicle), CFD (computational fluid dynamics),
FSI (fluid-structure integration) analysis, Design optimization, Kriging method
Nomenclature
: Angle of attack
: Coefficient of regression
CL: Coefficient of drag
CD: Coefficient of lift
f x : Global model
: Dihedral angle
: Taper ratio
r : Correlation vector
R : Correlation function
R : Correlation matrix
V : Velocity (m/s)
x : Design variables
y x : Exact response model
y x : Approximated response model
: Design variables
This is an Open Access article distributed under the terms of the Creative Com-mons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduc-tion in any medium, provided the original work is properly cited.
* Ph. D ** Ph. D *** Professor **** Ph. D ***** Ph. D ****** Professor, Corresponding author: [email protected]

DOI: http://dx.doi.org/10.5139/IJASS.2016.17.3.423 424
Int’l J. of Aeronautical & Space Sci. 17(3), 423–431 (2016)
2
addition, this optimization procedure is improved by adopting the design of experiment (DOE) and
Kriging model. A design optimization tool, PIAnO, integrates with an in-house codes, CAE
simulation and an optimization process for generating the wing geometry/computational mesh,
transferring information, and finding the optimum solution. The goal of this optimization is to find the
best high-aspect ratio wing shape that generates minimum drag at a cruise condition of CL = 1.0. The
result shows that the optimal wing shape produced 5.95 % less drag compared to the initial wing
shape.
Key words: Long endurance UAV (unmanned aerial vehicle), CFD (computational fluid dynamics),
FSI (fluid-structure integration) analysis, Design optimization, Kriging method
Nomenclature
: Angle of attack
: Coefficient of regression
CL: Coefficient of drag
CD: Coefficient of lift
f x : Global model
: Dihedral angle
: Taper ratio
r : Correlation vector
R : Correlation function
R : Correlation matrix
V : Velocity (m/s)
x : Design variables
y x : Exact response model
y x : Approximated response model
: Exact response model
2
addition, this optimization procedure is improved by adopting the design of experiment (DOE) and
Kriging model. A design optimization tool, PIAnO, integrates with an in-house codes, CAE
simulation and an optimization process for generating the wing geometry/computational mesh,
transferring information, and finding the optimum solution. The goal of this optimization is to find the
best high-aspect ratio wing shape that generates minimum drag at a cruise condition of CL = 1.0. The
result shows that the optimal wing shape produced 5.95 % less drag compared to the initial wing
shape.
Key words: Long endurance UAV (unmanned aerial vehicle), CFD (computational fluid dynamics),
FSI (fluid-structure integration) analysis, Design optimization, Kriging method
Nomenclature
: Angle of attack
: Coefficient of regression
CL: Coefficient of drag
CD: Coefficient of lift
f x : Global model
: Dihedral angle
: Taper ratio
r : Correlation vector
R : Correlation function
R : Correlation matrix
V : Velocity (m/s)
x : Design variables
y x : Exact response model
y x : Approximated response model : Approximated response model
3
Z x : Local deviation model
1. Introduction
The importance of long-endurance unmanned aerial vehicles (UAVs) in future airfields will be
growing due to their versatility in many applications, such as executing strategic reconnaissance,
providing telecommunication links, and helping in metrological research, forest fire detection, and
disaster monitoring. Therefore, design optimization techniques for long-endurance UAVs have been
investigated to improve their flight performance and to reduce the development effort. Rajagopal et al.
[1-2] proposed a multi-disciplinary design optimization (MDO) for optimizing the conceptual design
of a long-endurance UAV with the panel method code, XFLR5. Park et al. [3] employed a simple
multi-objective genetic algorithm to find an optimum airfoil shape for a long-endurance UAV.
High-aspect ratio wings of a long-endurance UAV are needed to minimize the induced drag and
easily cause wing deflection and deformation during flight [4, 5]. This tendency during flight can
cause incorrect prediction results if aerodynamic analysis is performed assuming a rigid wing.
Therefore, fluid -structure integration (FSI) analysis must be used in wing design optimization in
order to simulate a more accurate and realistic interaction between the aerodynamic loads and the
structural components of the aircraft wing.
FSI has two approaches: close coupling and loose coupling [6]. The close coupling approach
requires large computational resources since it reformulates and resolves the numerical equations by
combining the fluid and structural motion simultaneously. The second approach, loose coupling, deals
with only external interactions between the aerodynamic and structural models. Therefore, many
researchers have applied the loose coupling FSI to optimize an UAV wing design. For instance,
Gonzalez et al. applied loose coupling multi-physics to a long-endurance UAV wing design using
XFOIL/ MSES/ NSC2ke and NASTRAN for aerodynamic and structural analyses, respectively [7].
The meta-model techniques, such as the Kriging model, support vector regression (SVR) and
artificial neural network (ANN), contribute to simplifying the wing design optimization procedure and
produce optimum results without a large amount of expensive simulation. Consequently, the meta-
: Local deviation model
1. Introduction
The importance of long-endurance unmanned aerial
vehicles (UAVs) in future airfields will be growing due to their
versatility in many applications, such as executing strategic
reconnaissance, providing telecommunication links, and
helping in metrological research, forest fire detection,
and disaster monitoring. Therefore, design optimization
techniques for long-endurance UAVs have been investigated
to improve their flight performance and to reduce the
development effort. Rajagopal et al. [1-2] proposed a multi-
disciplinary design optimization (MDO) for optimizing the
conceptual design of a long-endurance UAV with the panel
method code, XFLR5. Park et al. [3] employed a simple
multi-objective genetic algorithm to find an optimum airfoil
shape for a long-endurance UAV.
High-aspect ratio wings of a long-endurance UAV are
needed to minimize the induced drag and easily cause
wing deflection and deformation during flight [4, 5]. This
tendency during flight can cause incorrect prediction results
if aerodynamic analysis is performed assuming a rigid wing.
Therefore, fluid -structure integration (FSI) analysis must be
used in wing design optimization in order to simulate a more
accurate and realistic interaction between the aerodynamic
loads and the structural components of the aircraft wing.
FSI has two approaches: close coupling and loose
coupling [6]. The close coupling approach requires large
computational resources since it reformulates and resolves
the numerical equations by combining the fluid and
structural motion simultaneously. The second approach,
loose coupling, deals with only external interactions between
the aerodynamic and structural models. Therefore, many
researchers have applied the loose coupling FSI to optimize
an UAV wing design. For instance, Gonzalez et al. applied
loose coupling multi-physics to a long-endurance UAV wing
design using XFOIL/ MSES/ NSC2ke and NASTRAN for
aerodynamic and structural analyses, respectively [7].
The meta-model techniques, such as the Kriging
model, support vector regression (SVR) and artificial
neural network (ANN), contribute to simplifying the wing
design optimization procedure and produce optimum
results without a large amount of expensive simulation.
Consequently, the meta-model techniques like SVR and
ANN have been incorporated into the UAV aircraft design,
especially in the design of their wing components.
Lee et al. suggested the design optimization of a long-
endurance UAV wing by using loose coupling FSI analysis
and the ANN technique [8]. Lam et al. studied an integrated
multi-objective optimization algorithm based on the Kriging
method to investigate aerodynamically or structurally
optimized transonic wings [9].
In this study, we optimized the design procedure using
FSI analysis and the Kriging method. The goal of this
study is finding the optimized shape of a high-aspect ratio
wing planform having minimum drag for an electrically
powered long-endurance UAV. Loose coupling FSI analysis
is performed with high-fidelity computational aerodynamic
and structural analysis codes, FLUENT and DIAMOND/
IPSAP. These analyses simulate realistic aeroelastic behaviors
of the long endurance UAV wing. We especially introduce
the design guidelines in which design variables influence
the system response of UAV. In addition, we suggest that
how to find the optimum solution efficiently though the
optimization techniques: design of experiment (DOE) and
Kriging method. Finally, we propose the optimum solution
to improve the efficiency and accuracy of the long endurance
UAV.
2. Optimization Procedure
2.1 FSI analysis
The wing shape of a flying airplane experiences
deformations due to the wing’s aerodynamic load (the wing
is the main source of lift force). The aeroelastic deformation of
aircraft wings are usually presented by an upward deflection
and a twist motion. Therefore, aerodynamic analysis based
on rigid wing shapes could lead to incorrect results.
To avoid these, we use an FSI analysis that considers
the coupling effects of an aerodynamic load as well as
structural deformation. The computation results of an
external aerodynamic load are distributed on the wing
surface. Structural analysis of the designed component
layouts and material properties of external and internal
wing structures is carried out to calculate the amount and
direction of deformation caused by the aerodynamic effect.
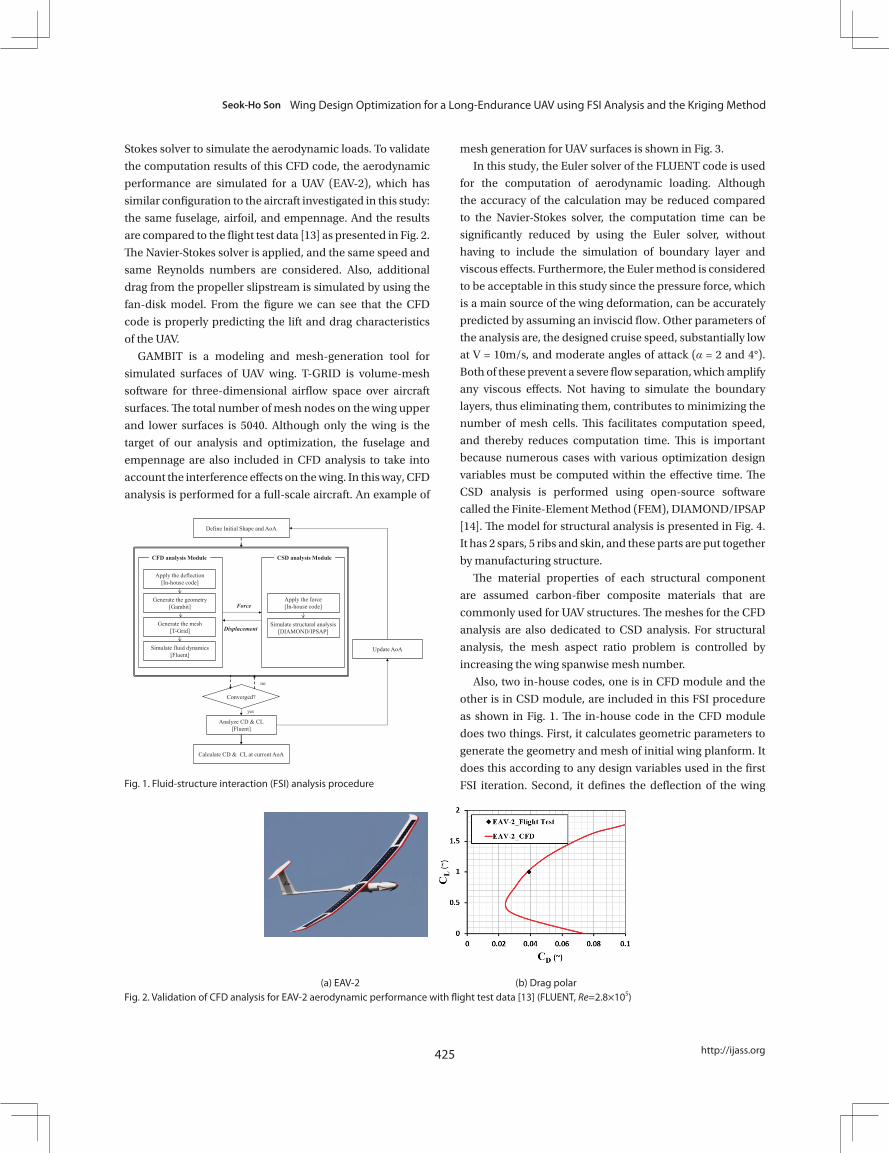
Fig. 1 shows the design procedure of the FSI analysis in
this study. The aerodynamic and structural analyses are
separately performed in computational fluid dynamics
(CFD) and computational structural dynamics (CSD)
modules, respectively. This procedure in Fig. 1 is the loose
coupling FSI.
The aerodynamic analysis module consisted of
GAMBIT [10], T-GRID [11], and FLUENT [12]. FLUENT is a
commercial CFD code that uses the Euler solver and Navier-
425
Seok-Ho Son Wing Design Optimization for a Long-Endurance UAV using FSI Analysis and the Kriging Method
http://ijass.org
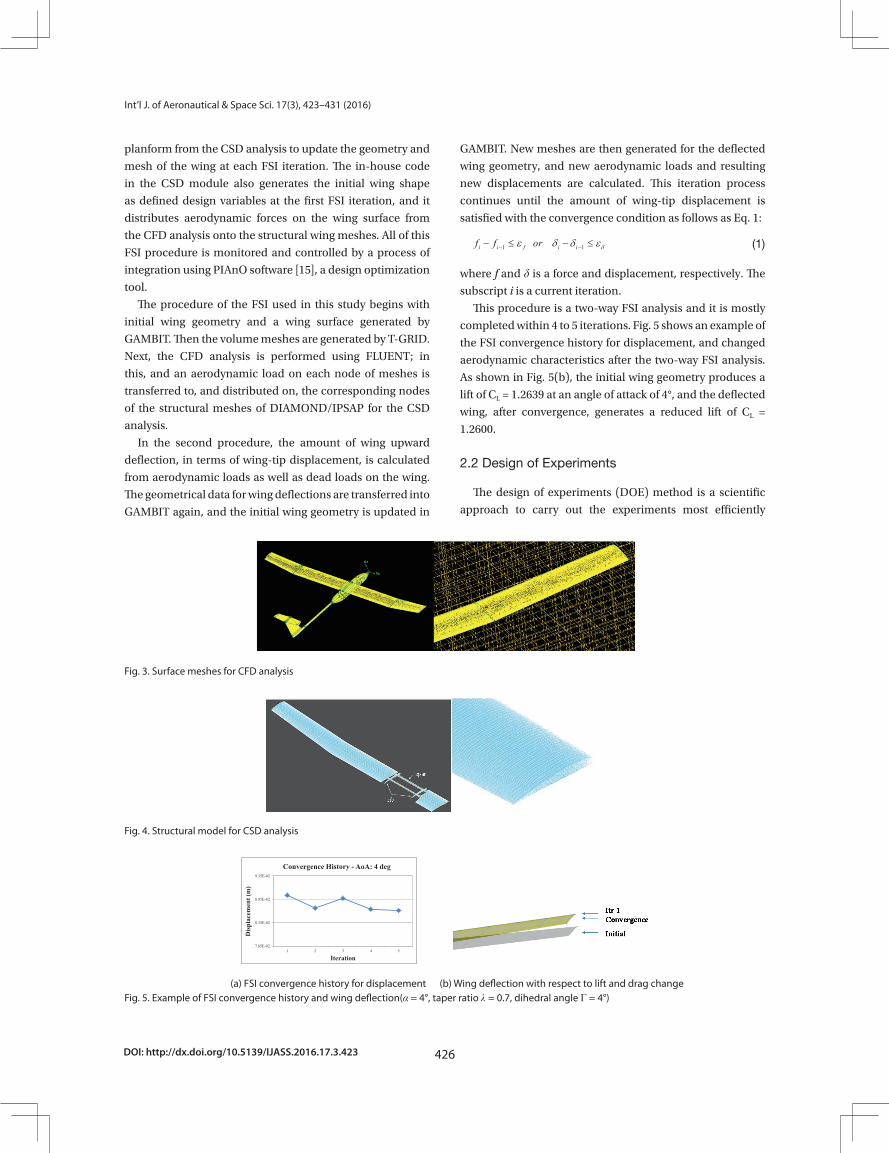
Stokes solver to simulate the aerodynamic loads. To validate
the computation results of this CFD code, the aerodynamic
performance are simulated for a UAV (EAV-2), which has
similar configuration to the aircraft investigated in this study:
the same fuselage, airfoil, and empennage. And the results
are compared to the flight test data [13] as presented in Fig. 2.
The Navier-Stokes solver is applied, and the same speed and
same Reynolds numbers are considered. Also, additional
drag from the propeller slipstream is simulated by using the
fan-disk model. From the figure we can see that the CFD
code is properly predicting the lift and drag characteristics
of the UAV.
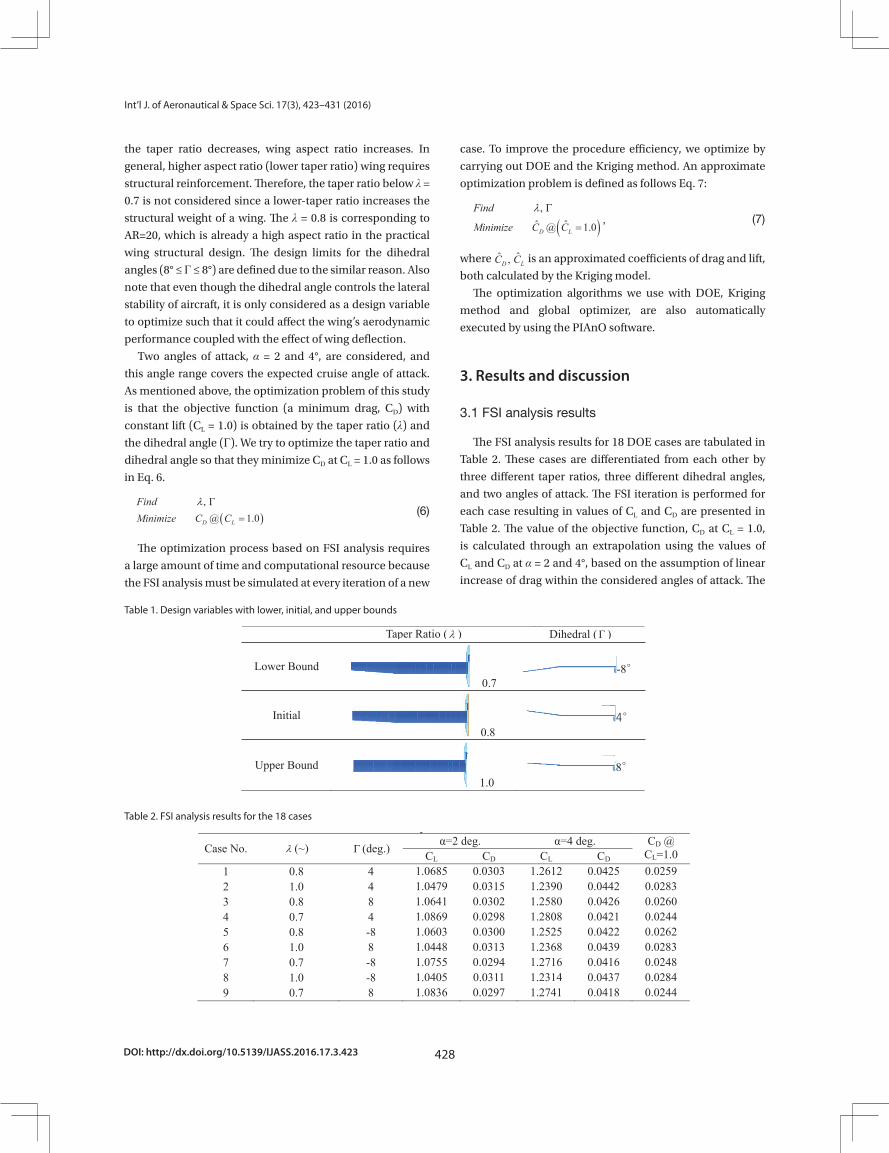
GAMBIT is a modeling and mesh-generation tool for
simulated surfaces of UAV wing. T-GRID is volume-mesh
software for three-dimensional airflow space over aircraft
surfaces. The total number of mesh nodes on the wing upper
and lower surfaces is 5040. Although only the wing is the
target of our analysis and optimization, the fuselage and
empennage are also included in CFD analysis to take into
account the interference effects on the wing. In this way, CFD
analysis is performed for a full-scale aircraft. An example of
mesh generation for UAV surfaces is shown in Fig. 3.
In this study, the Euler solver of the FLUENT code is used
for the computation of aerodynamic loading. Although
the accuracy of the calculation may be reduced compared
to the Navier-Stokes solver, the computation time can be
significantly reduced by using the Euler solver, without
having to include the simulation of boundary layer and
viscous effects. Furthermore, the Euler method is considered
to be acceptable in this study since the pressure force, which
is a main source of the wing deformation, can be accurately
predicted by assuming an inviscid flow. Other parameters of
the analysis are, the designed cruise speed, substantially low
at V = 10m/s, and moderate angles of attack (α = 2 and 4°).
Both of these prevent a severe flow separation, which amplify
any viscous effects. Not having to simulate the boundary
layers, thus eliminating them, contributes to minimizing the
number of mesh cells. This facilitates computation speed,
and thereby reduces computation time. This is important
because numerous cases with various optimization design
variables must be computed within the effective time. The
CSD analysis is performed using open-source software
called the Finite-Element Method (FEM), DIAMOND/IPSAP
[14]. The model for structural analysis is presented in Fig. 4.
It has 2 spars, 5 ribs and skin, and these parts are put together
by manufacturing structure.
The material properties of each structural component
are assumed carbon-fiber composite materials that are
commonly used for UAV structures. The meshes for the CFD
analysis are also dedicated to CSD analysis. For structural
analysis, the mesh aspect ratio problem is controlled by
increasing the wing spanwise mesh number.
Also, two in-house codes, one is in CFD module and the
other is in CSD module, are included in this FSI procedure
as shown in Fig. 1. The in-house code in the CFD module
does two things. First, it calculates geometric parameters to
generate the geometry and mesh of initial wing planform. It
does this according to any design variables used in the first
FSI iteration. Second, it defines the deflection of the wing
21
Fig. 1. Fluid-structure interaction (FSI) analysis procedure
Define Initial Shape and AoA
Generate the geometry[Gambit]
Converged?
Analyze CD & CL [Fluent]
Calculate CD & CL at current AoA
Force
yes
no
Update AoA
Generate the mesh[T-Grid]
Simulate fluid dynamics[Fluent]
Displacement
Apply the force[In-house code]
Apply the deflection[In-house code]
Simulate structural analysis[DIAMOND/IPSAP]
CFD analysis Module CSD analysis Module
Fig. 1. Fluid-structure interaction (FSI) analysis procedure
22
(a) EAV-2 (b) Drag polar
Fig. 2. Validation of CFD analysis for EAV-2 aerodynamic performance with flight test data [13]
(FLUENT, Re=2.8×105)
(a) EAV-2 (b) Drag polarFig. 2. Validation of CFD analysis for EAV-2 aerodynamic performance with flight test data [13] (FLUENT, Re=2.8×105)
DOI: http://dx.doi.org/10.5139/IJASS.2016.17.3.423 426
Int’l J. of Aeronautical & Space Sci. 17(3), 423–431 (2016)
planform from the CSD analysis to update the geometry and
mesh of the wing at each FSI iteration. The in-house code
in the CSD module also generates the initial wing shape
as defined design variables at the first FSI iteration, and it
distributes aerodynamic forces on the wing surface from
the CFD analysis onto the structural wing meshes. All of this
FSI procedure is monitored and controlled by a process of
integration using PIAnO software [15], a design optimization
tool.
The procedure of the FSI used in this study begins with
initial wing geometry and a wing surface generated by
GAMBIT. Then the volume meshes are generated by T-GRID.
Next, the CFD analysis is performed using FLUENT; in
this, and an aerodynamic load on each node of meshes is
transferred to, and distributed on, the corresponding nodes
of the structural meshes of DIAMOND/IPSAP for the CSD
analysis.
In the second procedure, the amount of wing upward
deflection, in terms of wing-tip displacement, is calculated
from aerodynamic loads as well as dead loads on the wing.
The geometrical data for wing deflections are transferred into
GAMBIT again, and the initial wing geometry is updated in
GAMBIT. New meshes are then generated for the deflected
wing geometry, and new aerodynamic loads and resulting
new displacements are calculated. This iteration process
continues until the amount of wing-tip displacement is
satisfied with the convergence condition as follows as Eq. 1:
7
GAMBIT. New meshes are then generated for the deflected wing geometry, and new aerodynamic
loads and resulting new displacements are calculated. This iteration process continues until the
amount of wing-tip displacement is satisfied with the convergence condition as follows as Eq. 1:
1 1i i f i if f or (1)
where f and is a force and displacement, respectively. The subscript i is a current iteration.
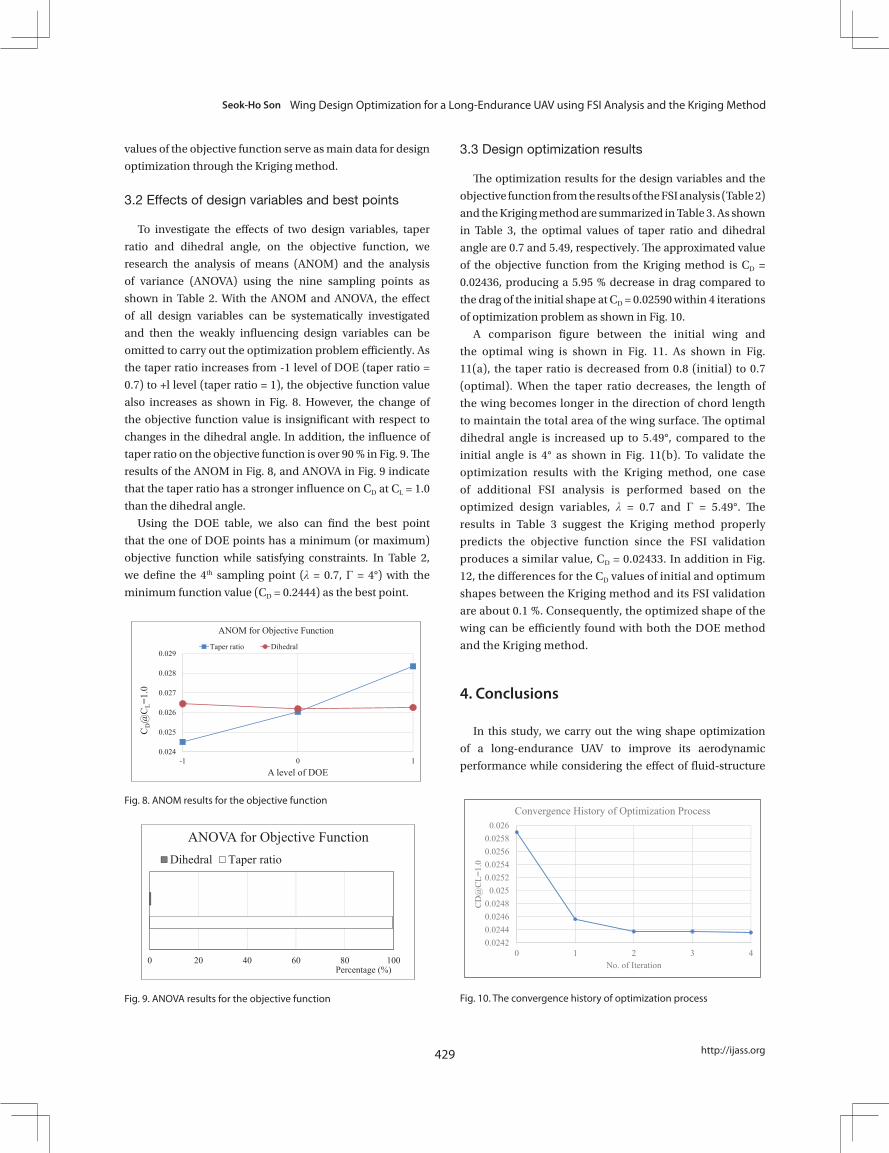
This procedure is a two-way FSI analysis and it is mostly completed within 4 to 5 iterations. Fig. 5
shows an example of the FSI convergence history for displacement, and changed aerodynamic
characteristics after the two-way FSI analysis. As shown in Fig. 5(b), the initial wing geometry
produces a lift of CL = 1.2639 at an angle of attack of 4°, and the deflected wing, after convergence,
generates a reduced lift of CL = 1.2600.
2.2 Design of Experiments
The design of experiments (DOE) method is a scientific approach to carry out the experiments most
efficiently and to simulate the computational system using statistical methods. The DOE is used to
determine which design variables have an effect on a response value, and, thus, which design
variables should be selected as the best point. Of the many methods for generating sampling points,
we choose these: full factorial design (FFD), central composite design (CCD), and optimal latin-hyper
cube design (OLHD).
In this study, we employ a 3-level FFD design method for a two design variables, which 2 design
variables arranged at 3 different factorial experiment point in Fig. 6 [16]. Due to the filling of
sampling points in the design space, 3-level FFD can be represented by the objective function within
an entire design space. According to 3-level FFD, a total of 18 simulations (3 taper ratios, 3 dihedral
angles, and 2 angles of attack) are carryout by the FSI analysis. Then using the interpolation method
at each sampling point, we calculate the objective function, using the values of CD at the target lift of
CL = 1.0
(1)
where f and δ is a force and displacement, respectively. The
subscript i is a current iteration.
This procedure is a two-way FSI analysis and it is mostly
completed within 4 to 5 iterations. Fig. 5 shows an example of
the FSI convergence history for displacement, and changed
aerodynamic characteristics after the two-way FSI analysis.
As shown in Fig. 5(b), the initial wing geometry produces a
lift of CL = 1.2639 at an angle of attack of 4°, and the deflected
wing, after convergence, generates a reduced lift of CL =
1.2600.
2.2 Design of Experiments
The design of experiments (DOE) method is a scientific
approach to carry out the experiments most efficiently
23
Fig. 3. Surface meshes for CFD analysis
Fig. 3. Surface meshes for CFD analysis
24
Fig. 4. Structural model for CSD analysis
Fig. 4. Structural model for CSD analysis
25
(a) FSI convergence history for displacement (b) Wing deflection with respect to lift and drag change
Fig. 5. Example of FSI convergence history and wing deflection ( = 4°, taper ratio = 0.7, dihedral angle = 4°)
7.85E-02
8.35E-02
8.85E-02
9.35E-02
1 2 3 4 5
Disp
lace
men
t (m
)
Iteration
Convergence History - AoA: 4 deg
(a) FSI convergence history for displacement (b) Wing deflection with respect to lift and drag changeFig. 5. Example of FSI convergence history and wing deflection(α = 4°, taper ratio λ = 0.7, dihedral angle Γ = 4°)

427
Seok-Ho Son Wing Design Optimization for a Long-Endurance UAV using FSI Analysis and the Kriging Method
http://ijass.org
and to simulate the computational system using statistical
methods. The DOE is used to determine which design
variables have an effect on a response value, and, thus, which
design variables should be selected as the best point. Of the
many methods for generating sampling points, we choose
these: full factorial design (FFD), central composite design
(CCD), and optimal latin-hyper cube design (OLHD).
In this study, we employ a 3-level FFD design method for
a two design variables, which 2 design variables arranged
at 3 different factorial experiment point in Fig. 6 [16]. Due to
the filling of sampling points in the design space, 3-level FFD
can be represented by the objective function within an entire
design space. According to 3-level FFD, a total of 18 simulations
(3 taper ratios, 3 dihedral angles, and 2 angles of attack) are
carryout by the FSI analysis. Then using the interpolation
method at each sampling point, we calculate the objective
function, using the values of CD at the target lift of CL = 1.0
2.3 Kriging Method
Meta-modeling is a method of approximating a real system
response efficiently based on the DOE. For wing design
optimization, even a single FSI analysis requires a large
amount of computation time, and a design optimization
with FSI analysis iteratively is very time-consuming. In order
to find the optimum wing shape efficiently, the objective
function, CD at CL = 1.0, is approximated by a Kriging method.
The Kriging method is composed of the combination of
a global model and a local deviation. An equation of the
Kriging model is defined as:
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
(2)
where
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
is a vector of design variables,
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
is a black
function at the interested point, and
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
is a global model at
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
.
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
is assumed to be a realization of a stationary Gaussian
process with zero mean, sigma square variance, and nonzero
covariance. The covariance matrix of
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
is defined as Eq. 3:
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
(3)
where
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
is a correlation matrix and R is a correlation
function between any two sampling points in the number of
experiment points (nexp).
In general, let
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
be assumed a best linear unbiased
predictor (BLUP) of
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
at the point of interest
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
as follows
Eq. 4:
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4) (4)
where
9
where 11 1ˆ t t β F R F F R y , a coefficient of regression, and is estimated by a generalized least square
method. The function * * *1, ,
t
nexpR R r x x x x x is a correlation vector between the
interested point *x and existing sampling points. For the correlation matrix and correlation vector, the
correlation parameters can be estimated by maximizing the concentrated conditional log likelihood
function as shown in Eq. 5 [17].
2ˆln ln lnL nexp R (5)
2.4 Application of FSI to the wing planform optimization
In this study, optimization of a wing planform is performed to find the optimized values of the two
design variables, a taper ratio ( ) and a dihedral angle ( ). The objective function of this
optimization study is the minimum CD of the aircraft at CL = 1.0. The lift coefficient of the aircraft, CL
= 1.0, is the design lift of this study for a long-endurance cruise condition. As shown in Fig. 7, the
initial wing planform is consisted of two parts, and the optimization process is applied to the only
outboard section (part 2) that starts at the 65% spanwise station. Therefore, the taper and dihedral
angle are changed for this outboard section. The initial value of taper ratio and dihedral angels is λ =
0.8 and Γ = 4°, respectively. The lower and upper bounds of the taper ratios are 0.7 and 1.0,
respectively, and the dihedral angles are +8° and -8°, as presented in Table 1. Wing area and wing root
chord are defined and fixed as 2.0 m2 and 0.32 m, based on a conceptual aircraft design procedure of
Advanced Aircraft Analysis (AAA) [18]. Therefore, varying taper ratio with the fixed-wing area
results in changes of wing aspect ratio: if the taper ratio decreases, wing aspect ratio increases. In
general, higher aspect ratio (lower taper ratio) wing requires structural reinforcement. Therefore, the
taper ratio below λ = 0.7 is not considered since a lower-taper ratio increases the structural weight of a
wing. The λ = 0.8 is corresponding to AR=20, which is already a high aspect ratio in the practical
wing structural design. The design limits for the dihedral angles (8° ≤ Γ ≤ 8°) are defined due to the
, a coefficient of regression, and
is estimated by a generalized least square method. The
function
9
where 11 1ˆ t t β F R F F R y , a coefficient of regression, and is estimated by a generalized least square
method. The function * * *1, ,
t
nexpR R r x x x x x is a correlation vector between the
interested point *x and existing sampling points. For the correlation matrix and correlation vector, the
correlation parameters can be estimated by maximizing the concentrated conditional log likelihood
function as shown in Eq. 5 [17].
2ˆln ln lnL nexp R (5)
2.4 Application of FSI to the wing planform optimization
In this study, optimization of a wing planform is performed to find the optimized values of the two
design variables, a taper ratio ( ) and a dihedral angle ( ). The objective function of this
optimization study is the minimum CD of the aircraft at CL = 1.0. The lift coefficient of the aircraft, CL
= 1.0, is the design lift of this study for a long-endurance cruise condition. As shown in Fig. 7, the
initial wing planform is consisted of two parts, and the optimization process is applied to the only
outboard section (part 2) that starts at the 65% spanwise station. Therefore, the taper and dihedral
angle are changed for this outboard section. The initial value of taper ratio and dihedral angels is λ =
0.8 and Γ = 4°, respectively. The lower and upper bounds of the taper ratios are 0.7 and 1.0,
respectively, and the dihedral angles are +8° and -8°, as presented in Table 1. Wing area and wing root
chord are defined and fixed as 2.0 m2 and 0.32 m, based on a conceptual aircraft design procedure of
Advanced Aircraft Analysis (AAA) [18]. Therefore, varying taper ratio with the fixed-wing area
results in changes of wing aspect ratio: if the taper ratio decreases, wing aspect ratio increases. In
general, higher aspect ratio (lower taper ratio) wing requires structural reinforcement. Therefore, the
taper ratio below λ = 0.7 is not considered since a lower-taper ratio increases the structural weight of a
wing. The λ = 0.8 is corresponding to AR=20, which is already a high aspect ratio in the practical
wing structural design. The design limits for the dihedral angles (8° ≤ Γ ≤ 8°) are defined due to the
is a correlation
vector between the interested point
8
2.3 Kriging Method
Meta-modeling is a method of approximating a real system response efficiently based on the DOE.
For wing design optimization, even a single FSI analysis requires a large amount of computation time,
and a design optimization with FSI analysis iteratively is very time-consuming. In order to find the
optimum wing shape efficiently, the objective function, CD at CL = 1.0, is approximated by a Kriging
method.
The Kriging method is composed of the combination of a global model and a local deviation. An
equation of the Kriging model is defined as:
y f Z x x x (2)
where x is a vector of design variables, y x is a black function at the interested point, and f x is
a global model at x . Z x is assumed to be a realization of a stationary Gaussian process with zero
mean, sigma square variance, and nonzero covariance. The covariance matrix of Z x is defined as
Eq. 3:
2, , , 1, 2, ,i j i jCov Z Z R i j nexp x x R x x (3)
where R is a correlation matrix and R is a correlation function between any two sampling points in
the number of experiment points (nexp).
In general, let *y x be assumed a best linear unbiased predictor (BLUP) of *y x at the point of
interest *x as follows Eq. 4:
* * * 1ˆ ˆˆ ,tty x f x β r x R y Fβ (4)
and existing sampling
points. For the correlation matrix and correlation vector, the
correlation parameters can be estimated by maximizing the
concentrated conditional log likelihood function as shown
in Eq. 5 [17].
9
where 11 1ˆ t t β F R F F R y , a coefficient of regression, and is estimated by a generalized least square
method. The function * * *1, ,
t
nexpR R r x x x x x is a correlation vector between the
interested point *x and existing sampling points. For the correlation matrix and correlation vector, the
correlation parameters can be estimated by maximizing the concentrated conditional log likelihood
function as shown in Eq. 5 [17].
2ˆln ln lnL nexp R (5)
2.4 Application of FSI to the wing planform optimization
In this study, optimization of a wing planform is performed to find the optimized values of the two
design variables, a taper ratio ( ) and a dihedral angle ( ). The objective function of this
optimization study is the minimum CD of the aircraft at CL = 1.0. The lift coefficient of the aircraft, CL
= 1.0, is the design lift of this study for a long-endurance cruise condition. As shown in Fig. 7, the
initial wing planform is consisted of two parts, and the optimization process is applied to the only
outboard section (part 2) that starts at the 65% spanwise station. Therefore, the taper and dihedral
angle are changed for this outboard section. The initial value of taper ratio and dihedral angels is λ =
0.8 and Γ = 4°, respectively. The lower and upper bounds of the taper ratios are 0.7 and 1.0,
respectively, and the dihedral angles are +8° and -8°, as presented in Table 1. Wing area and wing root
chord are defined and fixed as 2.0 m2 and 0.32 m, based on a conceptual aircraft design procedure of
Advanced Aircraft Analysis (AAA) [18]. Therefore, varying taper ratio with the fixed-wing area
results in changes of wing aspect ratio: if the taper ratio decreases, wing aspect ratio increases. In
general, higher aspect ratio (lower taper ratio) wing requires structural reinforcement. Therefore, the
taper ratio below λ = 0.7 is not considered since a lower-taper ratio increases the structural weight of a
wing. The λ = 0.8 is corresponding to AR=20, which is already a high aspect ratio in the practical
wing structural design. The design limits for the dihedral angles (8° ≤ Γ ≤ 8°) are defined due to the
(5)
2.4 Application of FSI to the wing planform optimi-zation
In this study, optimization of a wing planform is performed
to find the optimized values of the two design variables,
a taper ratio (λ) and a dihedral angle (Γ). The objective
function of this optimization study is the minimum CD of
the aircraft at CL = 1.0. The lift coefficient of the aircraft, CL =
1.0, is the design lift of this study for a long-endurance cruise
condition. As shown in Fig. 7, the initial wing planform is
consisted of two parts, and the optimization process is
applied to the only outboard section (part 2) that starts at
the 65% spanwise station. Therefore, the taper and dihedral
angle are changed for this outboard section. The initial
value of taper ratio and dihedral angels is λ = 0.8 and Γ = 4°,
respectively. The lower and upper bounds of the taper ratios
are 0.7 and 1.0, respectively, and the dihedral angles are +8°
and -8°, as presented in Table 1. Wing area and wing root
chord are defined and fixed as 2.0 m2 and 0.32 m, based on
a conceptual aircraft design procedure of Advanced Aircraft
Analysis (AAA) [18]. Therefore, varying taper ratio with the
fixed-wing area results in changes of wing aspect ratio: if
26
Fig. 6. The 3-level full factorial design of two design variables
Fig. 6. The 3-level full factorial design of two design variables
27
Fig. 7. Initial wing planform and optimized outboard section
Fig. 7. Initial wing planform and optimized outboard section
DOI: http://dx.doi.org/10.5139/IJASS.2016.17.3.423 428
Int’l J. of Aeronautical & Space Sci. 17(3), 423–431 (2016)
the taper ratio decreases, wing aspect ratio increases. In
general, higher aspect ratio (lower taper ratio) wing requires
structural reinforcement. Therefore, the taper ratio below λ =
0.7 is not considered since a lower-taper ratio increases the
structural weight of a wing. The λ = 0.8 is corresponding to
AR=20, which is already a high aspect ratio in the practical
wing structural design. The design limits for the dihedral
angles (8° ≤ Γ ≤ 8°) are defined due to the similar reason. Also
note that even though the dihedral angle controls the lateral
stability of aircraft, it is only considered as a design variable
to optimize such that it could affect the wing’s aerodynamic
performance coupled with the effect of wing deflection.
Two angles of attack, α = 2 and 4°, are considered, and
this angle range covers the expected cruise angle of attack.
As mentioned above, the optimization problem of this study
is that the objective function (a minimum drag, CD) with
constant lift (CL = 1.0) is obtained by the taper ratio (λ) and
the dihedral angle (Γ). We try to optimize the taper ratio and
dihedral angle so that they minimize CD at CL = 1.0 as follows
in Eq. 6.
10
similar reason. Also note that even though the dihedral angle controls the lateral stability of aircraft, it
is only considered as a design variable to optimize such that it could affect the wing’s aerodynamic
performance coupled with the effect of wing deflection.
Two angles of attack, α = 2 and 4°, are considered, and this angle range covers the expected cruise
angle of attack. As mentioned above, the optimization problem of this study is that the objective
function (a minimum drag, CD) with constant lift (CL = 1.0) is obtained by the taper ratio ( ) and the
dihedral angle ( ). We try to optimize the taper ratio and dihedral angle so that they minimize CD at
CL = 1.0 as follows in Eq. 5.
,
@ 1.0D L
FindMinimize C C
(5)
The optimization process based on FSI analysis requires a large amount of time and computational
resource because the FSI analysis must be simulated at every iteration of a new case. To improve the
procedure efficiency, we optimize by carrying out DOE and the Kriging method. An approximate
optimization problem is defined as follows Eq. 6:
,
ˆ ˆ@ 1.0D L
Find
Minimize C C
, (6)
where ˆ ˆ,D LC C is an approximated coefficients of drag and lift, both calculated by the Kriging model.
The optimization algorithms we use with DOE, Kriging method and global optimizer, are also
automatically executed by using the PIAnO software.
3. Results and discussion
3.1 FSI analysis results
The FSI analysis results for 18 DOE cases are tabulated in Table 2. These cases are differentiated
from each other by three different taper ratios, three different dihedral angles, and two angles of attack.
(6)
The optimization process based on FSI analysis requires
a large amount of time and computational resource because
the FSI analysis must be simulated at every iteration of a new
case. To improve the procedure efficiency, we optimize by
carrying out DOE and the Kriging method. An approximate
optimization problem is defined as follows Eq. 7:
10
similar reason. Also note that even though the dihedral angle controls the lateral stability of aircraft, it
is only considered as a design variable to optimize such that it could affect the wing’s aerodynamic
performance coupled with the effect of wing deflection.
Two angles of attack, α = 2 and 4°, are considered, and this angle range covers the expected cruise
angle of attack. As mentioned above, the optimization problem of this study is that the objective
function (a minimum drag, CD) with constant lift (CL = 1.0) is obtained by the taper ratio ( ) and the
dihedral angle ( ). We try to optimize the taper ratio and dihedral angle so that they minimize CD at
CL = 1.0 as follows in Eq. 5.
,
@ 1.0D L
FindMinimize C C
(5)
The optimization process based on FSI analysis requires a large amount of time and computational
resource because the FSI analysis must be simulated at every iteration of a new case. To improve the
procedure efficiency, we optimize by carrying out DOE and the Kriging method. An approximate
optimization problem is defined as follows Eq. 6:
,
ˆ ˆ@ 1.0D L
Find
Minimize C C
, (6)
where ˆ ˆ,D LC C is an approximated coefficients of drag and lift, both calculated by the Kriging model.
The optimization algorithms we use with DOE, Kriging method and global optimizer, are also
automatically executed by using the PIAnO software.
3. Results and discussion
3.1 FSI analysis results
The FSI analysis results for 18 DOE cases are tabulated in Table 2. These cases are differentiated
from each other by three different taper ratios, three different dihedral angles, and two angles of attack.
(7)
where
10
similar reason. Also note that even though the dihedral angle controls the lateral stability of aircraft, it
is only considered as a design variable to optimize such that it could affect the wing’s aerodynamic
performance coupled with the effect of wing deflection.
Two angles of attack, α = 2 and 4°, are considered, and this angle range covers the expected cruise
angle of attack. As mentioned above, the optimization problem of this study is that the objective
function (a minimum drag, CD) with constant lift (CL = 1.0) is obtained by the taper ratio ( ) and the
dihedral angle ( ). We try to optimize the taper ratio and dihedral angle so that they minimize CD at
CL = 1.0 as follows in Eq. 5.
,
@ 1.0D L
FindMinimize C C
(5)
The optimization process based on FSI analysis requires a large amount of time and computational
resource because the FSI analysis must be simulated at every iteration of a new case. To improve the
procedure efficiency, we optimize by carrying out DOE and the Kriging method. An approximate
optimization problem is defined as follows Eq. 6:
,
ˆ ˆ@ 1.0D L
Find
Minimize C C
, (6)
where ˆ ˆ,D LC C is an approximated coefficients of drag and lift, both calculated by the Kriging model.
The optimization algorithms we use with DOE, Kriging method and global optimizer, are also
automatically executed by using the PIAnO software.
3. Results and discussion
3.1 FSI analysis results
The FSI analysis results for 18 DOE cases are tabulated in Table 2. These cases are differentiated
from each other by three different taper ratios, three different dihedral angles, and two angles of attack.
is an approximated coefficients of drag and lift,
both calculated by the Kriging model.
The optimization algorithms we use with DOE, Kriging
method and global optimizer, are also automatically
executed by using the PIAnO software.
3. Results and discussion
3.1 FSI analysis results
The FSI analysis results for 18 DOE cases are tabulated in
Table 2. These cases are differentiated from each other by
three different taper ratios, three different dihedral angles,
and two angles of attack. The FSI iteration is performed for
each case resulting in values of CL and CD are presented in
Table 2. The value of the objective function, CD at CL = 1.0,
is calculated through an extrapolation using the values of
CL and CD at α = 2 and 4°, based on the assumption of linear
increase of drag within the considered angles of attack. The
Table 1. Design variables with lower, initial, and upper bounds
18
Table 1. Design variables with lower, initial, and upper bounds Taper Ratio ( ) Dihedral ( )
Lower Bound 0.7
-8°
Initial 0.8
4°
Upper Bound 1.0
8°
Table 2. FSI analysis results for the 18 cases
19
Table 2. FSI analysis results for the 18 cases
Case No. (~) (deg.) α=2 deg. α=4 deg. CD @ CL=1.0 CL CD CL CD
1 0.8 4 1.0685 0.0303 1.2612 0.0425 0.0259 2 1.0 4 1.0479 0.0315 1.2390 0.0442 0.0283 3 0.8 8 1.0641 0.0302 1.2580 0.0426 0.0260 4 0.7 4 1.0869 0.0298 1.2808 0.0421 0.0244 5 0.8 -8 1.0603 0.0300 1.2525 0.0422 0.0262 6 1.0 8 1.0448 0.0313 1.2368 0.0439 0.0283 7 0.7 -8 1.0755 0.0294 1.2716 0.0416 0.0248 8 1.0 -8 1.0405 0.0311 1.2314 0.0437 0.0284 9 0.7 8 1.0836 0.0297 1.2741 0.0418 0.0244
429
Seok-Ho Son Wing Design Optimization for a Long-Endurance UAV using FSI Analysis and the Kriging Method
http://ijass.org
values of the objective function serve as main data for design
optimization through the Kriging method.
3.2 Effects of design variables and best points
To investigate the effects of two design variables, taper
ratio and dihedral angle, on the objective function, we
research the analysis of means (ANOM) and the analysis
of variance (ANOVA) using the nine sampling points as
shown in Table 2. With the ANOM and ANOVA, the effect
of all design variables can be systematically investigated
and then the weakly influencing design variables can be
omitted to carry out the optimization problem efficiently. As
the taper ratio increases from -1 level of DOE (taper ratio =
0.7) to +l level (taper ratio = 1), the objective function value
also increases as shown in Fig. 8. However, the change of
the objective function value is insignificant with respect to
changes in the dihedral angle. In addition, the influence of
taper ratio on the objective function is over 90 % in Fig. 9. The
results of the ANOM in Fig. 8, and ANOVA in Fig. 9 indicate
that the taper ratio has a stronger influence on CD at CL = 1.0
than the dihedral angle.
Using the DOE table, we also can find the best point
that the one of DOE points has a minimum (or maximum)
objective function while satisfying constraints. In Table 2,
we define the 4th sampling point (λ = 0.7, Γ = 4°) with the
minimum function value (CD = 0.2444) as the best point.
3.3 Design optimization results
The optimization results for the design variables and the
objective function from the results of the FSI analysis (Table 2)
and the Kriging method are summarized in Table 3. As shown
in Table 3, the optimal values of taper ratio and dihedral
angle are 0.7 and 5.49, respectively. The approximated value
of the objective function from the Kriging method is CD =
0.02436, producing a 5.95 % decrease in drag compared to
the drag of the initial shape at CD = 0.02590 within 4 iterations
of optimization problem as shown in Fig. 10.
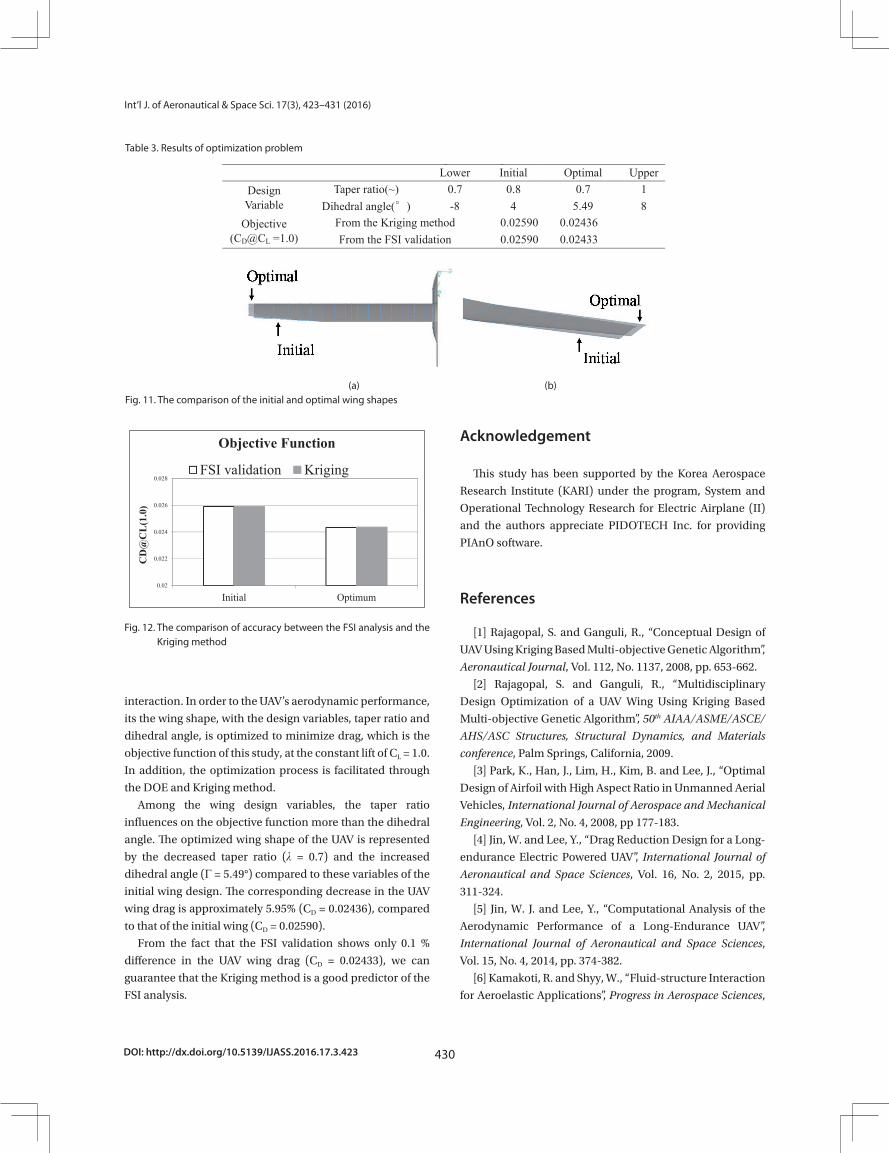
A comparison figure between the initial wing and
the optimal wing is shown in Fig. 11. As shown in Fig.
11(a), the taper ratio is decreased from 0.8 (initial) to 0.7
(optimal). When the taper ratio decreases, the length of
the wing becomes longer in the direction of chord length
to maintain the total area of the wing surface. The optimal
dihedral angle is increased up to 5.49°, compared to the
initial angle is 4° as shown in Fig. 11(b). To validate the
optimization results with the Kriging method, one case
of additional FSI analysis is performed based on the
optimized design variables, λ = 0.7 and Γ = 5.49°. The
results in Table 3 suggest the Kriging method properly
predicts the objective function since the FSI validation
produces a similar value, CD = 0.02433. In addition in Fig.
12, the differences for the CD values of initial and optimum
shapes between the Kriging method and its FSI validation
are about 0.1 %. Consequently, the optimized shape of the
wing can be efficiently found with both the DOE method
and the Kriging method.
4. Conclusions
In this study, we carry out the wing shape optimization
of a long-endurance UAV to improve its aerodynamic
performance while considering the effect of fluid-structure
28
Fig. 8. ANOM results for the objective function
0.024
0.025
0.026
0.027
0.028
0.029
-1 0 1
C D@
C L=1
.0
A level of DOE
ANOM for Objective Function
Taper ratio Dihedral
Fig. 8. ANOM results for the objective function
29
Fig. 9. ANOVA results for the objective function
0 20 40 60 80 100Percentage (%)
ANOVA for Objective FunctionDihedral Taper ratio
Fig. 9. ANOVA results for the objective function
30
Fig. 10. The convergence history of optimization process
0.02420.02440.02460.0248
0.0250.02520.02540.02560.0258
0.026
0 1 2 3 4
CD@
CL=1
.0
No. of Iteration
Convergence History of Optimization Process
Fig. 10. The convergence history of optimization process
DOI: http://dx.doi.org/10.5139/IJASS.2016.17.3.423 430
Int’l J. of Aeronautical & Space Sci. 17(3), 423–431 (2016)
interaction. In order to the UAV’s aerodynamic performance,
its the wing shape, with the design variables, taper ratio and
dihedral angle, is optimized to minimize drag, which is the
objective function of this study, at the constant lift of CL = 1.0.
In addition, the optimization process is facilitated through
the DOE and Kriging method.
Among the wing design variables, the taper ratio
influences on the objective function more than the dihedral
angle. The optimized wing shape of the UAV is represented
by the decreased taper ratio (λ = 0.7) and the increased
dihedral angle (Γ = 5.49°) compared to these variables of the
initial wing design. The corresponding decrease in the UAV
wing drag is approximately 5.95% (CD = 0.02436), compared
to that of the initial wing (CD = 0.02590).
From the fact that the FSI validation shows only 0.1 %
difference in the UAV wing drag (CD = 0.02433), we can
guarantee that the Kriging method is a good predictor of the
FSI analysis.
Acknowledgement
This study has been supported by the Korea Aerospace
Research Institute (KARI) under the program, System and
Operational Technology Research for Electric Airplane (II)
and the authors appreciate PIDOTECH Inc. for providing
PIAnO software.
References
[1] Rajagopal, S. and Ganguli, R., “Conceptual Design of
UAV Using Kriging Based Multi-objective Genetic Algorithm”,
Aeronautical Journal, Vol. 112, No. 1137, 2008, pp. 653-662.
[2] Rajagopal, S. and Ganguli, R., “Multidisciplinary
Design Optimization of a UAV Wing Using Kriging Based
Multi-objective Genetic Algorithm”, 50th AIAA/ASME/ASCE/
AHS/ASC Structures, Structural Dynamics, and Materials
conference, Palm Springs, California, 2009.
[3] Park, K., Han, J., Lim, H., Kim, B. and Lee, J., “Optimal
Design of Airfoil with High Aspect Ratio in Unmanned Aerial
Vehicles, International Journal of Aerospace and Mechanical
Engineering, Vol. 2, No. 4, 2008, pp 177-183.
[4] Jin, W. and Lee, Y., “Drag Reduction Design for a Long-
endurance Electric Powered UAV”, International Journal of
Aeronautical and Space Sciences, Vol. 16, No. 2, 2015, pp.
311-324.
[5] Jin, W. J. and Lee, Y., “Computational Analysis of the
Aerodynamic Performance of a Long-Endurance UAV”,
International Journal of Aeronautical and Space Sciences,
Vol. 15, No. 4, 2014, pp. 374-382.
[6] Kamakoti, R. and Shyy, W., “Fluid-structure Interaction
for Aeroelastic Applications”, Progress in Aerospace Sciences,
Table 3. Results of optimization problem
20
Table 3. Results of optimization problem Lower Initial Optimal Upper
Design Variable
Taper ratio(~) 0.7 0.8 0.7 1 Dihedral angle(°) -8 4 5.49 8
Objective (CD@CL =1.0)
From the Kriging method 0.02590 0.02436 From the FSI validation 0.02590 0.02433
31
(a) (b)
Fig. 11. The comparison of the initial and optimal wing shapes
(a) (b)Fig. 11. The comparison of the initial and optimal wing shapes
32
Fig. 12. The comparison of accuracy between the FSI analysis and the Kriging method
0.02
0.022
0.024
0.026
0.028
Initial Optimum
CD
@C
L(1.
0)
Objective Function
FSI validation Kriging
Fig. 12. The comparison of accuracy between the FSI analysis and the Kriging method

431
Seok-Ho Son Wing Design Optimization for a Long-Endurance UAV using FSI Analysis and the Kriging Method
http://ijass.org
Vol. 40, 2004, pp. 535-558.
[7] Gonzalez, L.F., Walker, R., Srinivas, K. and Periaux, J.,
“Multidisciplinary Design Optimization of Unmanned Aerial
Systems (UAS) Using Meta Model Assisted Evolutionary
Algorithms”, 16th Australasian Fluid Mechanics Conference,
Gold Coast, Australia, 2007.
[8] Lee, S., Park, K., Kim, J., Jeon, S., Kim, K. and Lee, D.,
“Fluid-Structure Interaction and Design Optimization of
HAR Wing for Continuous 24-hour Flight of S-HALE Aircraft”,
the proceeding of KSAS, Vol. 4, 2012, pp. 121-126.
[9] Lam, X., Kim, A., Hoang, A. and Park, C., “Coupled
Aerostructural Design Optimization Using the Kriging Model
and Integrated Multiobjective Optimization Algorithm”,
Journal of Optimization Theory and Applications, Vol. 142,
2009, pp. 533-556.
[10] GAMBIT Software Package, Ver. 2.4.6, Ansys Fluent
Inc., Canonsburg, PA, USA
[11] TGRID Ver. 3.5, Ansys Fluent Inc., Canonsburg, PA, USA
[12] FLUENT Software Package, Ver. 6.3.26, Ansys Fluent
Inc., Canonsburg, PA, USA
[13] W. Jin. and Y. G. Lee, “Drag Reduction Design for
a Long-endurance Electric Powered UAV”, International
Journal of Aeronautical and Space Sciences, Vol. 16, No. 2,
2015, pp. 311-324.
[14] Diamond user manual, http://www.ipsap.snu.ac.kr,
2008.
[15] PIAnO (Process Integration, Automation and
Optimization) User’s Manual, Version 2.4, PIDOTECH Inc.,
2008.
[16] Son, S., Lee, S. and Choi, D., “Experiment-Based
Design Optimization of a Washing Machine Liquid Balancer
for Vibration Reduction”, International Journal of Precision
Engineering and Manufacturing, Vol. 13, No. 8, 2012, pp.
1433-1438.
[17] Forrester, A., Sobseter, A. and Keane, A., Engineering
Design via Surrogate Modeling, John Wiley & Sons, 2008.
[18] Advanced Aircraft Analysis software package, Ver. 3.2,
DARCorporation, Lawrence, KS, USA