video 1.1 vijay kumar and ani hsieh - edxpennx+robo3x+2t2017...robo3x-1.1 4 property of penn...
TRANSCRIPT

Robo3x-1.1 1 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 1.1
Vijay Kumar and Ani Hsieh

Robo3x-1.1 2 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Vijay Kumar and Ani Hsieh
University of Pennsylvania
Robotics: Dynamics and Control

Robo3x-1.1 3 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Robots live in a physical world
• The physical world is governed by the
laws of motion
• Fundamental understanding of dynamics
of robots
Why?

Robo3x-1.1 4 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Models of robots
• Robot manipulators, ground robots,
flying robots…
• Beyond geometric and kinematic models
to dynamic models
• Use dynamic models for real world
applications
The Goal

Robo3x-1.1 5 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Two sets of problems:
• Forward dynamics
How do robots move when we apply forces or
torques to the actuators, or currents/voltages to
the motors?
• Inverse dynamics
What forces or torques or currents or voltages
to apply to achieve a desired output (force or
moment or velocity or acceleration)?
Dynamics

Robo3x-1.1 6 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Robotic Manipulation

Robo3x-1.1 7 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Cooperative Manipulation

Robo3x-1.1 8 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Coordination of Ground Robots
Robo3x-1.1 9 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Autonomous Quadrotors

Robo3x-1.1 10 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 1.2
Vijay Kumar and Ani Hsieh

Robo3x-1.1 11 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Vijay Kumar and Ani Hsieh
University of Pennsylvania
Dynamics and Control Introduction

Robo3x-1.1 12 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• 3-D vectors, geometry
• Vector calculus, kinematics
• Rotation matrices
• Transformation matrices
What should you know?

Robo3x-1.1 13 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• How to create dynamic models of robots?
• How to simulate robotic systems?
• How to control robotic systems?
What you will learn

Robo3x-1.1 14 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Particle dynamics
Kinematics
Kinetics
• Rigid body dynamics
Kinematics
Kinetics
• Application to chains of rigid bodies
Newton-Euler Equations of Motion
Lagrange’s Equations of Motion
Dynamics

Robo3x-1.1 15 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Forward Dynamics
How does the robot move if you apply
a set of forces or torques at the
actuators
Simulation
http://money.cnn.com/2015/04/07/technology/sa
wyer-robot-manufacturing-revolution/
J. Thomas, G. Loianno, J. Polin, K. Sreenath,
and V. Kumar, “Toward autonomous avian-
inspired grasping for micro aerial vehicles,” Bioinspiration and Biomimetics, vol. 9, no. 2, p.
025010, June 2014.

Robo3x-1.1 16 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Inverse Dynamics What forces or torques need to be applied
by the actuators in order to get the robot to
move or act in a desired manner
Control
http://money.cnn.com/2015/04/07/technology/sa
wyer-robot-manufacturing-revolution/
J. Thomas, G. Loianno, J. Polin, K. Sreenath,
and V. Kumar, “Toward autonomous avian-
inspired grasping for micro aerial vehicles,” Bioinspiration and Biomimetics, vol. 9, no. 2, p.
025010, June 2014.

Robo3x-1.1 17 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Robot manipulators
• Ground robots: wheeled
• Flying robots: quadrotors
Applications
http://ros.org

Robo3x-1.1 18 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 1.3
Vijay Kumar and Ani Hsieh

Robo3x-1.1 19 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Vijay Kumar and Ani Hsieh
University of Pennsylvania
Dynamics and Control Review

Robo3x-1.1 20 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Reference frame
• Origin
• Basis vectors
Reference Frames
B
a1
a3
a2
P
A
b1
b3
b2
• Reference frame
• Origin
• Basis vectors
O

Robo3x-1.1 21 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Reference frame
• Origin
• Basis vectors
• Position Vectors
• Position vectors for P and Q in A
• Position vector of Q in B
Position Vectors
B
a1
a3
a2
P
Q
O
A
b1
b3
b2

Robo3x-1.1 22 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Position vectors for P and Q in A
Position Vectors
B
a1
a3
a2
P
Q
O
A
Robo3x-1.1 23 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
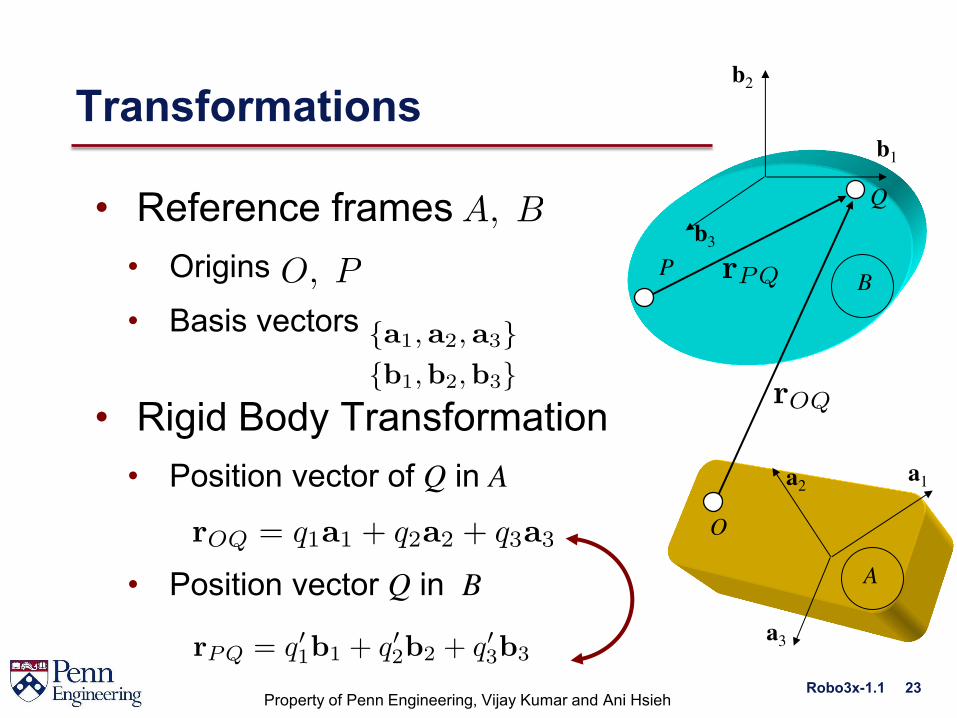
• Reference frames
• Origins
• Basis vectors
• Rigid Body Transformation
• Position vector of Q in A
• Position vector Q in B
Transformations
B
a1
a3
a2
P
Q
O
A
b1
b3
b2

Robo3x-1.1 24 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Transformations
B
a1
a3
a2
P
Q
O
A
b1
b3
b2

Robo3x-1.1 25 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Transformations
B
a1
a3
a2
P
Q
O
A
b1
b3
b2
Rotation
Matrix

Robo3x-1.1 26 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Rotation Matrix
B
a1
a3
a2
b1
b3
b2

Robo3x-1.1 27 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Homogeneous Transformation Matrix
B
a1
a3
a2
P
Q
O
A
b1
b3
b2
Position of
Q in A Position of
Q in B
4x4 homogeneous
transformation matrix

Robo3x-1.1 28 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 1.4
Vijay Kumar and Ani Hsieh

Robo3x-1.1 29 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Vijay Kumar and Ani Hsieh
University of Pennsylvania
Dynamics and Control Velocity and Acceleration Analysis

Robo3x-1.1 30 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Reference frame
• Origin
• Basis vectors
• Position Vectors
• Position vectors for P and Q in A
• Position vector of Q in B
Position Vectors
B
a1
a3
a2
P
Q
O
A
b1
b3
b2

Robo3x-1.1 31 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Velocity of P and Q in A
Velocity Vectors
B
a1
a3
a2
P
Q
O
A

Robo3x-1.1 32 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Velocity of P and Q in B
Velocity Vectors
B
a1
a3
a2
P
Q
O
A
Zero, since both
points are fixed to B!

Robo3x-1.1 33 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Velocity of P and Q in A
Velocity Vectors
B
a1
a3
a2
P
Q
O
A How to relate velocities of two
points fixed to the same rigid
body?

Robo3x-1.1 34 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Recall …
B
a1
a3
a2
P
Q
O
A
b1
b3
b2

Robo3x-1.1 35 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Velocities of 2 points fixed to the same rigid body
B
a1
a3
a2
P
Q
O
A
b1
b3
b2
3x3 skew
symmetric

Robo3x-1.1 36 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Rotation about the z-axis through q
zA
xA
yA
xB yB
q
Example: Rotation about a single axis

Robo3x-1.1 37 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Velocities of 2 points fixed to the same rigid body
B
a1
a3
a2
P
Q
O
A
b1
b3
b2
Recall a 3x3 skew symmetric matrix
encodes a cross product operation

Robo3x-1.1 38 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Acceleration of P and Q in A
Acceleration Analysis
B
a1
a3
a2
P
Q
O
A

Robo3x-1.1 39 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
• Lagrangian Mechanics
need expressions of kinetic and
potential energy, and external
forces/moments
• Newtonian Mechanics
need expressions for
accelerations and external
forces/moments
Two Approaches
B
a1
a3
a2
P
Q
O
A

Robo3x-1.1 40 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Video 1.5
Vijay Kumar and Ani Hsieh

Robo3x-1.1 41 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Vijay Kumar and Ani Hsieh
University of Pennsylvania
Dynamics and Control Velocity and Acceleration Analysis: Examples

Robo3x-1.1 42 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Inertial reference frame E
• Origin O
• Basis vectors
• P is fixed to link 1
A one link manipulator
Joint
x0
y0
θ1
a1
P
O

Robo3x-1.1 43 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Position and Velocity Vectors
Joint
x0
y0
θ1
a1
P
O

Robo3x-1.1 44 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Inertial reference frame E
• Origin O
• Basis vectors
• P is fixed to both links 1 and 2
• P and Q are fixed to link 2
Two Link Manipulator
Joint 1
Joint 2
Link 1
Link 2
x0
y0
x1
y1
x2
y2
θ1
θ2
a1
a2
P Q
O

Robo3x-1.1 45 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Position Vectors
Link 1
Link 2
x0
y0
x1
y1
x2
y2
θ1
θ2
a1
a2
P Q
O

Robo3x-1.1 46 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Position Vectors
Link 1
Link 2
x0
y0
x1
y1
x2
y2
θ1
θ2
a1
a2
P Q
O

Robo3x-1.1 47 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Velocity of point Q in the inertial frame
Link 1
Link 2
x0
y0
x1
y1
x2
y2
θ1
θ2
a1
a2
P Q
O

Robo3x-1.1 48 Property of Penn Engineering, Vijay Kumar and Ani Hsieh
Velocity of point Q in the inertial frame – alternative approach
x0
y0
x1
y1
x2
y2
P Q
O
x1
θ1
θ2