uci rescue robotics - university of california, irvinejkrichma/abr/ground_robot_manual...uci rescue...
TRANSCRIPT
UCIRescueRobotics
2015-2016
GroundRobotManual
1UCIRescueRobotics2014-2015-Groundrobotmanual
I. CHANGESFROM2014-2015
• Android with Eclipse is no longer supported with recent IOIO libraries. Consider switching toAndroidStudio
• A new IOIO library (5.06/5.05) has been released as a release candidate. Use this version or5.00/5.04.
• Some Bluetooth dongles may not work with the IOIO. Dongles listed athttps://github.com/ytai/ioio/wiki/Supported-Bluetooth-Dongles will work for certain.
II. DO'SANDDON'TS
Donot:• Block/hold the motors or servos when they are running/turning. This will damage the
motors/servosandtheelectronics.• Control the robot tomove from full speed inonedirection to full speed in theother.Thiswill
damagethemotorsandtheelectronics.
Do:• Checkthemax(peak,stall…)currentandoperatingvoltageforeachelectronicdeviceyouuse.• Checkallthewireconnectionsbeforepluggingthebatteryandpoweringtherobot
2UCIRescueRobotics2014-2015-Groundrobotmanual
III. PREREQUISITE
Participantsshouldhave:
• Computer/laptop(WindowsorMacpreferred)• Androidphone(withAndroid>2.2preferred)• USBcabletoconnectphonetolaptop
Participantsshouldhavedownloadedontheircomputer:
1. AndroidSDK(AndroidStudio,nolongerEclipse)(http://developer.android.com/sdk/index.html)
2. AlltheAndroidtoolsandAndroidAPIs(e.g.Android4.4.2…).ThismighttakeacoupleofhoursSomepackagesmightnotgetinstalledbutthat’sok.(http://developer.android.com/sdk/installing/adding-packages.html)
3. ThelatestIOIOlibraries(ClientSoftware,5.06/5.05:App-IOIO0505.zip)https://github.com/ytai/ioio/wiki/Downloads

3UCIRescueRobotics2014-2015-Groundrobotmanual
IV. PARTS
1. DaguWildThumper6WDAll-TerrainChassis,Black,75:1,(QTY:1)This rugged, 6-wheel-drive chassis from Dagu Electronics is designed to excel at traversing roughterrainandsteepinclines,makingitagreatplatformforanyrobotthatneedstoperformtasksinacomplexoutdoorenvironment.ItfeaturessixpowerfulDCmotorswithbrassbrushesand75:1steelgearboxesandaunique“super-twist”suspensionsystemactstokeepeachwheelincontactwiththeground formaximumtraction,evenwhendrivingoverunevenorbumpysurfaces.The suspensioncanbeadjustedtosuitdifferentloadsandconditions.Thechassis’aluminumplatehas4mmholesspacedevery10mm,providingplentyofoptionswhenitcomestomountingyourcontrolelectronics,sensors,andadditionalhardware,andwithamaximumrecommendedpayload of 5 kg (11 lb). This is a differential-drive chassis,meaning that turning isaccomplishedbydrivingthemotorsonthetwosidesoftheplatformatdifferentspeeds.Thethreemotorsoneachsideoftherobotarewired inparallel,soonly twochannelsofmotor controlarerequired to get this chassis moving. Themotors are intended for a maximum nominal operatingvoltageof7.2V(2Vminimum),andeachhasastallcurrentof6.6Aandano-loadcurrentof420mAat7.2V.Note:themotorswillbrieflydrawthefullstallcurrentwhenabruptlystartingfromrest(andnearlytwice the stall current when abruptly going from full speed in one direction to full speed in theother…SODONOTDOTHIS!Themaxcurrentwouldbe6.6Ax2x3motors=39.6Aperchannel).Controllingtherobotthiswaywoulddamagethemotorsandtheelectroniccomponents.
http://www.pololu.com/product/1563

4UCIRescueRobotics2014-2015-Groundrobotmanual
2. MotorcontrollerRoboClaw2x30A,(QTY:1)TheRoboClawmotorcontrollersfromOrionRoboticscancontrolapairofbrushedDCmotorsusingUSB serial, TTL serial, RC, or analog inputs. Integrated dual quadrature decodersmake it easy tocreateaclosed-loopspeedcontrolsystem.Thisversioncansupplyacontinuous30Aperchannel(60Apeak).
http://www.pololu.com/product/2393
3. Switchesa. WildThumperHighPowerSwitch,(QTY:1)
Batteryvoltage:6V-20VCurrentrating:10Acontinuous-NoheatsinkCurrentrating:30Acontinuous-Chassisusedasheatsinkwithheattransfercompound.Currentrating:60Acontinuous-Heavydutyheatsink,fanandheattransfercompound.
http://www.jameco.com/1/1/7399-rs003hp-wild-thumper-high-power-switch.html
b. IlluminatedToggleSwitchOn/Off(Red),(QTY:1)ToggleSwitchandCover-Illuminated(Red),ratedfor12V20A,includesMissileSwitchCover.
http://www.robotshop.com/en/illuminated-toggle-switch-red.html
5UCIRescueRobotics2014-2015-Groundrobotmanual
4. DuratraxNiMHOnyx7.2V5000mAhStickStandardPlug,(QTY:2)
http://www.amazon.com/Duratrax-NiMH-5000mAh-Stick-Standard/dp/B004AF88K0/ref=sr_1_cc_1?s=aps&ie=UTF8&qid=1414970891&sr=1-1-
catcorr&keywords=DuraTrax+NiMH+Onyx+7.2V+5000mAh
5. DuratraxOnyx200AC/DCSportPeakCharger,(QTY:1)
http://www.amazon.com/Duratrax-Onyx-Sport-Peak-Charger/dp/B001BCF4YS/ref=sr_1_1?s=toys-and-games&ie=UTF8&qid=1414971105&sr=1-1&keywords=DuraTrax+Onyx+200
6. IOIO-OTG,(QTY:1)
AreyouaJavadeveloper lookingtoaddadvancedhardwareI/OcapabilitiestoyourAndroidorPCapplication? Well then the IOIO-OTG is for you! The IOIO-OTG (pronounced “yo-yo-O-T-G”) is adevelopmentboardspeciallydesignedtodojustthat.ItfeaturesaPICmicrocontrollerwhichactslikeabridgethatconnectsanapponyourPCorAndroiddevicetolow-levelperipheralslikeGPIO,PWM,ADC, I2C, SPI, and UART. An app-level library helps you write control code for these low levelperipheralsinthesamewayyou’dwriteanyotherJavaapp!TheIOIO-OTGhastwoon-boardvoltageregulators: a switching regulator that can take5V-15V input andoutputs up to 3Aof stable 5V, alinearregulatorthatfeedsoffthe5Vlineandoutputsupto500mAofstable3.3V
https://www.sparkfun.com/products/11343
6UCIRescueRobotics2014-2015-Groundrobotmanual
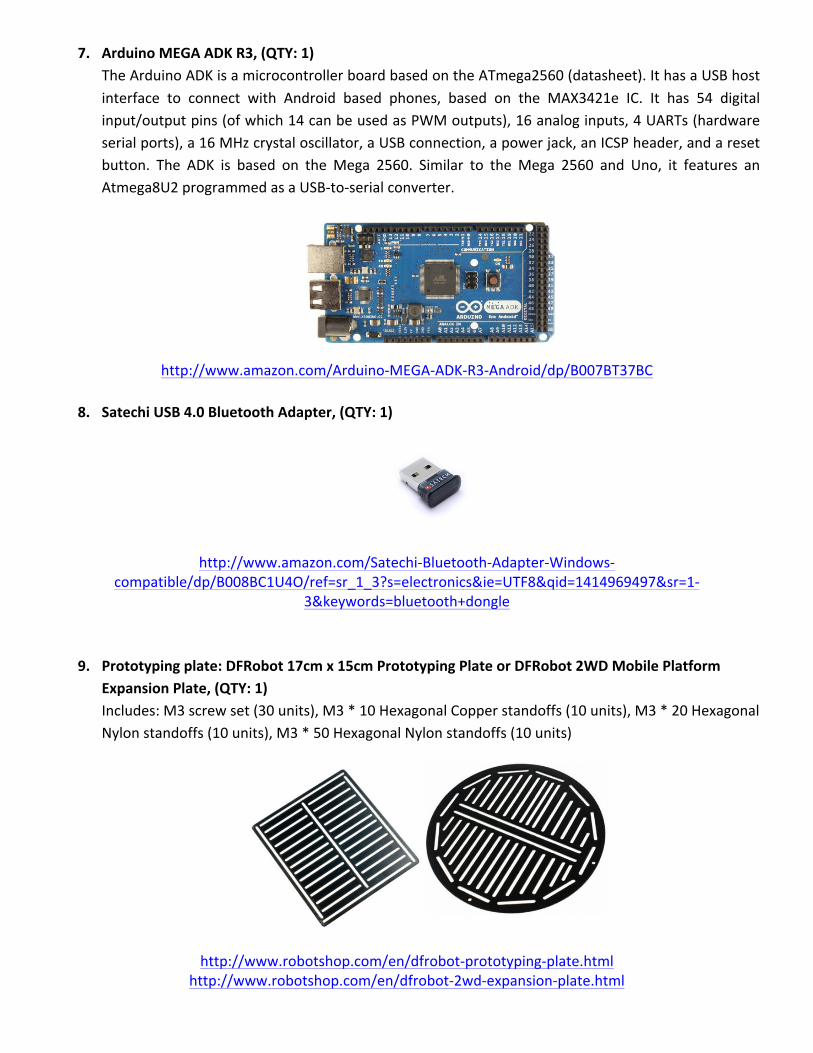
7. ArduinoMEGAADKR3,(QTY:1)TheArduinoADKisamicrocontrollerboardbasedontheATmega2560(datasheet).IthasaUSBhostinterface to connect with Android based phones, based on the MAX3421e IC. It has 54 digitalinput/outputpins(ofwhich14canbeusedasPWMoutputs),16analoginputs,4UARTs(hardwareserialports),a16MHzcrystaloscillator,aUSBconnection,apowerjack,anICSPheader,andaresetbutton. The ADK is based on theMega 2560. Similar to theMega 2560 and Uno, it features anAtmega8U2programmedasaUSB-to-serialconverter.
http://www.amazon.com/Arduino-MEGA-ADK-R3-Android/dp/B007BT37BC
8. SatechiUSB4.0BluetoothAdapter,(QTY:1)
http://www.amazon.com/Satechi-Bluetooth-Adapter-Windows-compatible/dp/B008BC1U4O/ref=sr_1_3?s=electronics&ie=UTF8&qid=1414969497&sr=1-
3&keywords=bluetooth+dongle
9. Prototypingplate:DFRobot17cmx15cmPrototypingPlateorDFRobot2WDMobilePlatformExpansionPlate,(QTY:1)Includes:M3screwset(30units),M3*10HexagonalCopperstandoffs(10units),M3*20HexagonalNylonstandoffs(10units),M3*50HexagonalNylonstandoffs(10units)
http://www.robotshop.com/en/dfrobot-prototyping-plate.htmlhttp://www.robotshop.com/en/dfrobot-2wd-expansion-plate.html

7UCIRescueRobotics2014-2015-Groundrobotmanual
10. MaxSonarEZ0UltrasonicRangeFinder,(QTY:4)TheLVMaxSonarEZ0offersvery short to long-rangedetectionand ranging, inan incredibly smallpackagewithultralowpowerconsumption.TheLVMaxSonarEZ0detectsobjectsfrom0-inchesto254-inches(6.45-meters)andprovidessonarrangeinformationfrom6-inchesoutto254-incheswith1-inch resolution. Objects between 0-inches and 6-inches range as 6-inches. The interface outputformats included are pulse width output, analog voltage output, and asynchronous serial digitaloutput.TheEZ0offersthemostsensitivityoftheMaxSonarProductline,yieldingacontrolledwidebeamwithhighsensitivity.
http://www.superdroidrobots.com/shop/item.aspx/lv-maxsonar-ez0-ultrasonic-range-finder/830/
11. SingleMaxBotixSonarServoArmBracket,(QTY:4)
http://www.superdroidrobots.com/shop/item.aspx/single-maxbotix-sonar-servo-arm-bracket/1644/
12. HS-485HBServo,(QTY:2)• Speed(sec/60o):0.20(4.8V),0.17(6V)• Torque(Kg-cm/Oz-in):5.2/72(4.8V),6.4/89(6V)• Size(mm):39.9x19.8x37.9• Weight:45g/1.59oz
http://www.robotshop.com/en/hitec-hs-485hb-servo-motor.html

8UCIRescueRobotics2014-2015-Groundrobotmanual
13. SPT200DirectDrivePan&TiltSystem,(QTY:1)CanuseanystandardsizeHitecservo.Perfectforcamerasorsensorsupto2lbs.
http://www.robotshop.com/en/servocity-spt200-pan-tilt.html
14. DirectDrivePanBaseMountforSPT200,(QTY:1)
http://www.robotshop.com/en/direct-drive-pan-base-mount-spt200-or-ddp125.html
15. RetiCAM®SmartphoneTripodMount,(QTY:1)
http://www.amazon.com/RetiCAM%C2%AE-Smartphone-Tripod-Mount-Universal/dp/B00FS5L9D4/

9UCIRescueRobotics2014-2015-Groundrobotmanual
16. Wires/connectors(22AWGcircuit,14AWGpower/motors)a. WireswithPre-crimpedTerminals50-PieceRainbowAssortmentFemale-Female6",(QTY:1)
http://www.pololu.com/product/1800
b. WireswithPre-crimpedTerminals50-PieceRainbowAssortmentMale-Female6",(QTY:1)
http://www.pololu.com/product/1801
c. StrandedWire:White,Black,Red,22AWG,50Feet,(QTY:1eachcolor)
http://www.pololu.com/product/2649http://www.pololu.com/product/2640http://www.pololu.com/product/2642
d. 0.100"(2.54mm)BreakawayMaleHeader:1x40-Pin,Straight,(QTY:2)
http://www.pololu.com/product/965
e. 0.1"(2.54mm)CrimpConnectorHousing:1x1-Pin25-Pack,(QTY:4)
http://www.pololu.com/product/1900

10UCIRescueRobotics2014-2015-Groundrobotmanual
f. FemaleCrimpPinsfor0.1"Housings100-Pack,(QTY:1)
http://www.pololu.com/product/1930
g. JRConnectorPack,Male,(QTY:4)
http://www.pololu.com/product/1925
h. JRConnectorPack,Female,(QTY:4)
http://www.pololu.com/product/1924
i. TwistedServoExtensionCable12"Female-Female,(QTY:2)
http://www.pololu.com/product/2166
11UCIRescueRobotics2014-2015-Groundrobotmanual
j. TwistedServoExtensionCable12"Male-Female,(QTY:7)
http://www.pololu.com/product/2169
k. GrandGeneralRed,Black,14-GaugePrimaryWire,(QTY:1eachcolor)
http://www.amazon.com/Grand-General-55241-14-Gauge-
Primary/dp/B00INVEUP4/ref=pd_bxgy_auto_text_yhttp://www.amazon.com/Grand-General-55240-14-Gauge-
Primary/dp/B00INVEUNQ/ref=pd_bxgy_auto_text_y
l. TamiyaPlugwith10cmLeads,Female,14AWG(QTY:2)
http://www.pololu.com/product/2172
12UCIRescueRobotics2014-2015-Groundrobotmanual
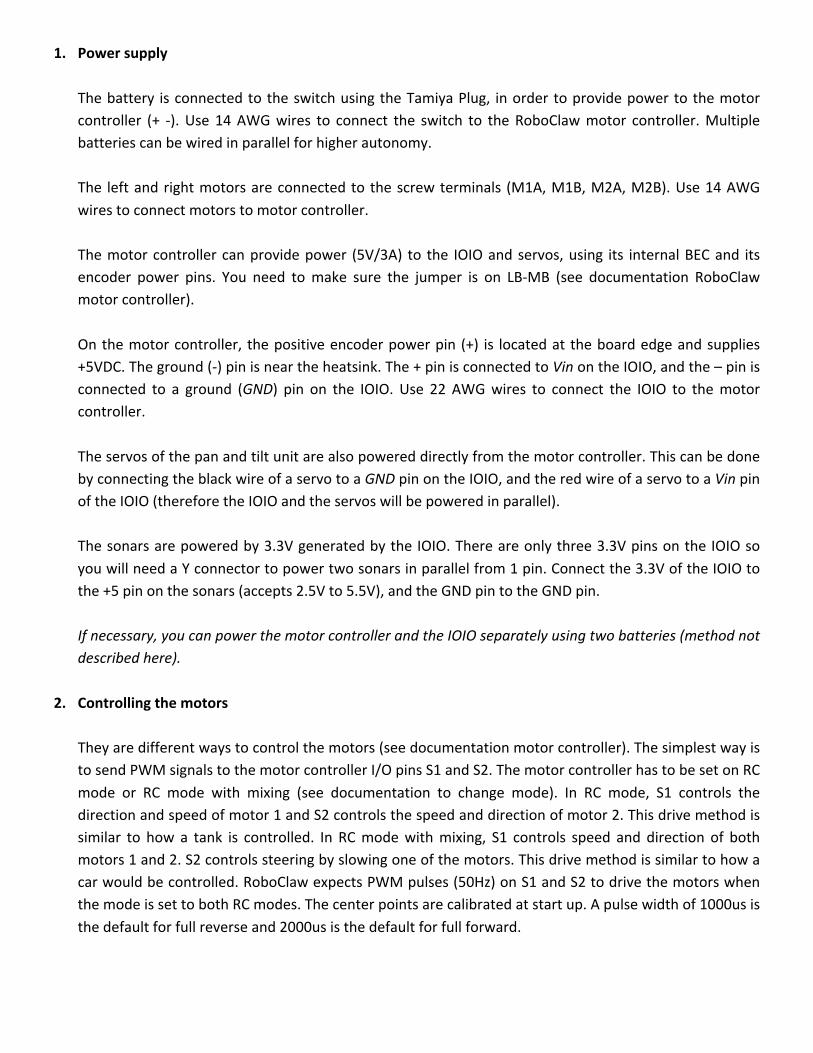
V. GENERALDESIGN

13UCIRescueRobotics2014-2015-Groundrobotmanual
Figure1.Possiblesetupofthedifferentcomponentsofthegroundrobot.Schematicnotdrawntoscale.Thicklinesare14AWGwires,thinlinesare22AWGwires.
Ultrasonicsensor(sonar1)
Servo-pan
Servo-tilt
Ultrasonicsensor(sonar2)
Ultrasonicsensor(sonar3)
Ultrasonicsensor(sonar4)
IOIOOTG
Vin 3.3V
GND
GND
Vin
5
6
4342
43
44
45
Wildthumpermotors(left)
Motorcontroller-RoboClaw
Battery
SwitchWildthumpermotors(right)
M1A M1B + - M2AM2B
S1 S2+(5V) -
14UCIRescueRobotics2014-2015-Groundrobotmanual
1. PowersupplyThebattery isconnectedtotheswitchusingtheTamiyaPlug, inordertoprovidepowertothemotorcontroller (+ -).Use 14AWGwires to connect the switch to theRoboClawmotor controller.Multiplebatteriescanbewiredinparallelforhigherautonomy.The leftandrightmotorsareconnectedtothescrewterminals (M1A,M1B,M2A,M2B).Use14AWGwirestoconnectmotorstomotorcontroller.Themotorcontrollercanprovidepower (5V/3A) to the IOIOandservos,using its internalBECand itsencoder power pins. You need tomake sure the jumper is on LB-MB (see documentation RoboClawmotorcontroller).Onthemotorcontroller, thepositiveencoderpowerpin (+) is locatedat theboardedgeandsupplies+5VDC.Theground(-)pinisneartheheatsink.The+pinisconnectedtoVinontheIOIO,andthe–pinisconnected to a ground (GND) pin on the IOIO. Use 22 AWGwires to connect the IOIO to themotorcontroller.Theservosofthepanandtiltunitarealsopowereddirectlyfromthemotorcontroller.ThiscanbedonebyconnectingtheblackwireofaservotoaGNDpinontheIOIO,andtheredwireofaservotoaVinpinoftheIOIO(thereforetheIOIOandtheservoswillbepoweredinparallel).Thesonarsarepoweredby3.3VgeneratedbytheIOIO.Thereareonlythree3.3VpinsontheIOIOsoyouwillneedaYconnectortopowertwosonarsinparallelfrom1pin.Connectthe3.3VoftheIOIOtothe+5pinonthesonars(accepts2.5Vto5.5V),andtheGNDpintotheGNDpin.Ifnecessary,youcanpowerthemotorcontrollerandtheIOIOseparatelyusingtwobatteries(methodnotdescribedhere).
2. ControllingthemotorsTheyaredifferentwaystocontrolthemotors(seedocumentationmotorcontroller).ThesimplestwayistosendPWMsignalstothemotorcontrollerI/OpinsS1andS2.ThemotorcontrollerhastobesetonRCmode or RC mode with mixing (see documentation to change mode). In RC mode, S1 controls thedirectionandspeedofmotor1andS2controlsthespeedanddirectionofmotor2.Thisdrivemethodissimilar to how a tank is controlled. In RCmodewithmixing, S1 controls speed and direction of bothmotors1and2.S2controlssteeringbyslowingoneofthemotors.Thisdrivemethodissimilartohowacarwouldbecontrolled.RoboClawexpectsPWMpulses(50Hz)onS1andS2todrivethemotorswhenthemodeissettobothRCmodes.Thecenterpointsarecalibratedatstartup.Apulsewidthof1000usisthedefaultforfullreverseand2000usisthedefaultforfullforward.
15UCIRescueRobotics2014-2015-Groundrobotmanual
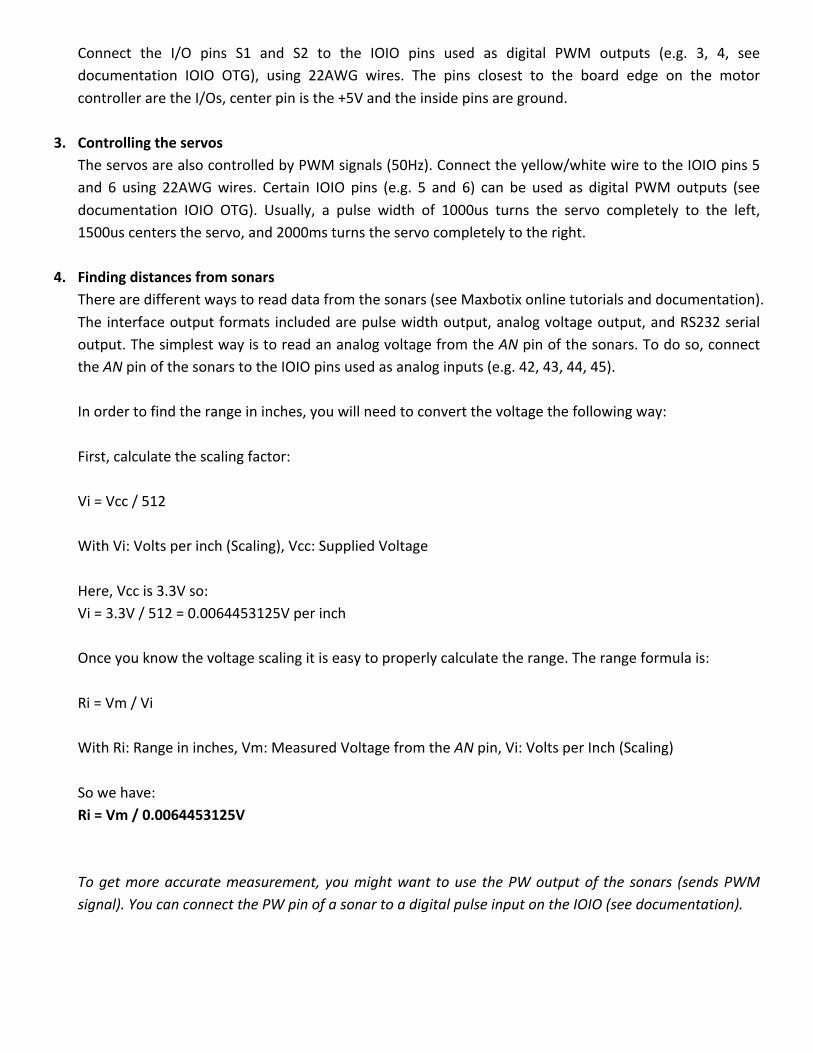
Connect the I/O pins S1 and S2 to the IOIO pins used as digital PWM outputs (e.g. 3, 4, seedocumentation IOIO OTG), using 22AWG wires. The pins closest to the board edge on the motorcontrolleraretheI/Os,centerpinisthe+5Vandtheinsidepinsareground.
3. Controllingtheservos
TheservosarealsocontrolledbyPWMsignals(50Hz).Connecttheyellow/whitewiretotheIOIOpins5and 6 using 22AWGwires. Certain IOIO pins (e.g. 5 and 6) can be used as digital PWMoutputs (seedocumentation IOIO OTG). Usually, a pulse width of 1000us turns the servo completely to the left,1500uscenterstheservo,and2000msturnstheservocompletelytotheright.
4. FindingdistancesfromsonarsTherearedifferentwaystoreaddatafromthesonars(seeMaxbotixonlinetutorialsanddocumentation).Theinterfaceoutputformats includedarepulsewidthoutput,analogvoltageoutput,andRS232serialoutput.ThesimplestwayistoreadananalogvoltagefromtheANpinofthesonars.Todoso,connecttheANpinofthesonarstotheIOIOpinsusedasanaloginputs(e.g.42,43,44,45).Inordertofindtherangeininches,youwillneedtoconvertthevoltagethefollowingway:First,calculatethescalingfactor:Vi=Vcc/512WithVi:Voltsperinch(Scaling),Vcc:SuppliedVoltageHere,Vccis3.3Vso:Vi=3.3V/512=0.0064453125VperinchOnceyouknowthevoltagescalingitiseasytoproperlycalculatetherange.Therangeformulais:Ri=Vm/ViWithRi:Rangeininches,Vm:MeasuredVoltagefromtheANpin,Vi:VoltsperInch(Scaling)Sowehave:Ri=Vm/0.0064453125VTogetmoreaccuratemeasurement,youmightwant touse thePWoutputof thesonars (sendsPWMsignal).YoucanconnectthePWpinofasonartoadigitalpulseinputontheIOIO(seedocumentation).

16UCIRescueRobotics2014-2015-Groundrobotmanual
VI. TESTINGCOMPONENTS
A. Hardware1. Screwstandoffstolowerpartofprototypingplate
2. mountthehighpowerswitchontheplate
3. mountthemotorcontrollerontheplate

17UCIRescueRobotics2014-2015-Groundrobotmanual
4. mounttheIOIOontheplate
5. mountasonarontheplate(assembleitfirst)
18UCIRescueRobotics2014-2015-Groundrobotmanual
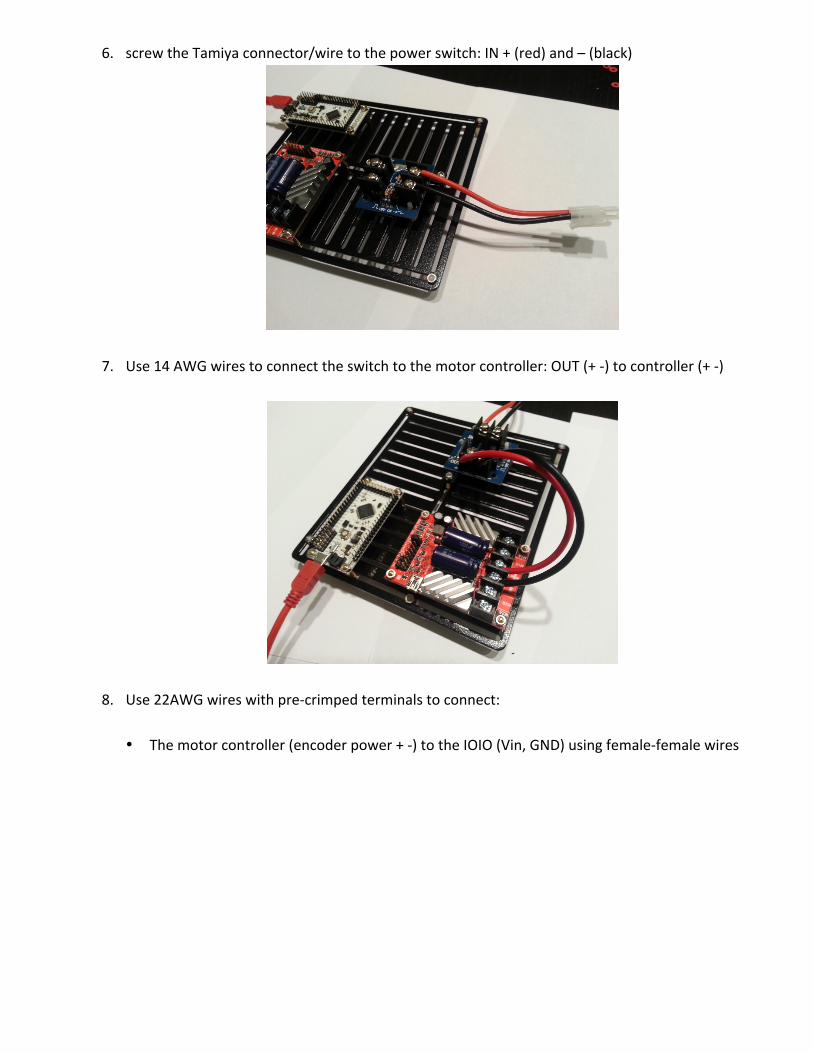
6. screwtheTamiyaconnector/wiretothepowerswitch:IN+(red)and–(black)
7. Use14AWGwirestoconnecttheswitchtothemotorcontroller:OUT(+-)tocontroller(+-)
8. Use22AWGwireswithpre-crimpedterminalstoconnect:• Themotorcontroller(encoderpower+-)totheIOIO(Vin,GND)usingfemale-femalewires

19UCIRescueRobotics2014-2015-Groundrobotmanual
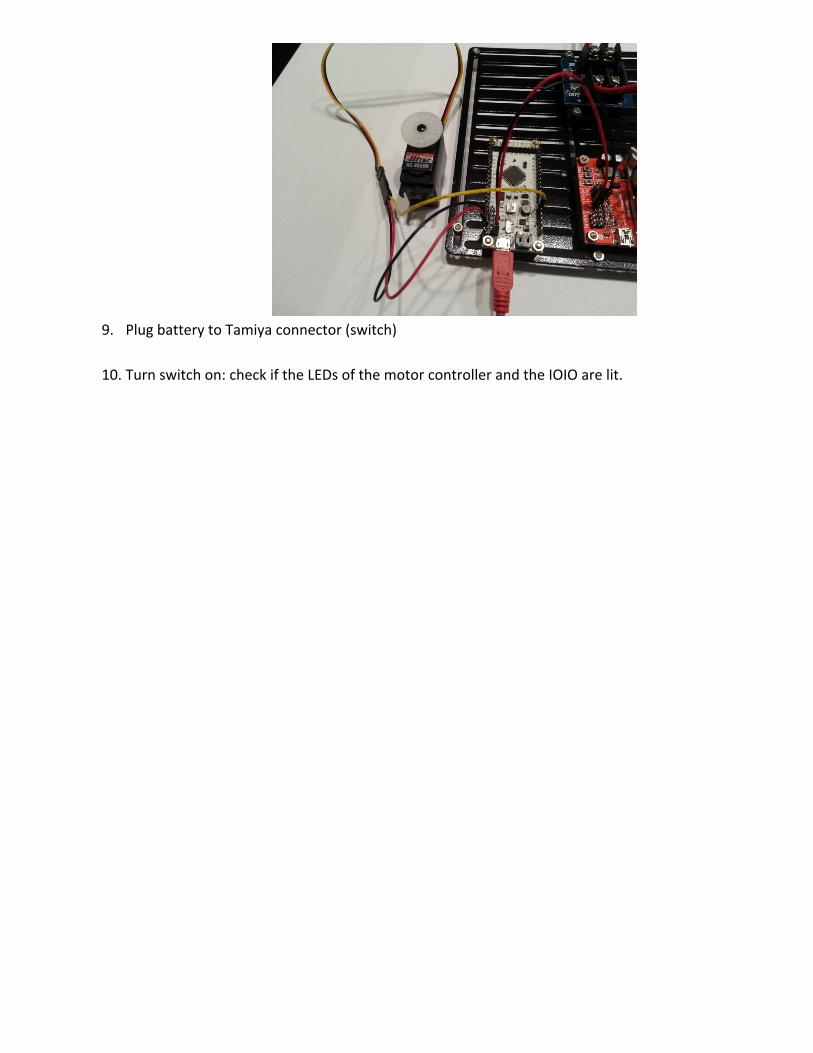
• AsonartoIOIO(3.3V,GND,analogpin40),usingfemale-femalewires
• AHS-485HBservototheIOIO(5V,GND,PWMpin5),usingmale-femalewires
20UCIRescueRobotics2014-2015-Groundrobotmanual
9. PlugbatterytoTamiyaconnector(switch)
10. Turnswitchon:checkiftheLEDsofthemotorcontrollerandtheIOIOarelit.
21UCIRescueRobotics2014-2015-Groundrobotmanual
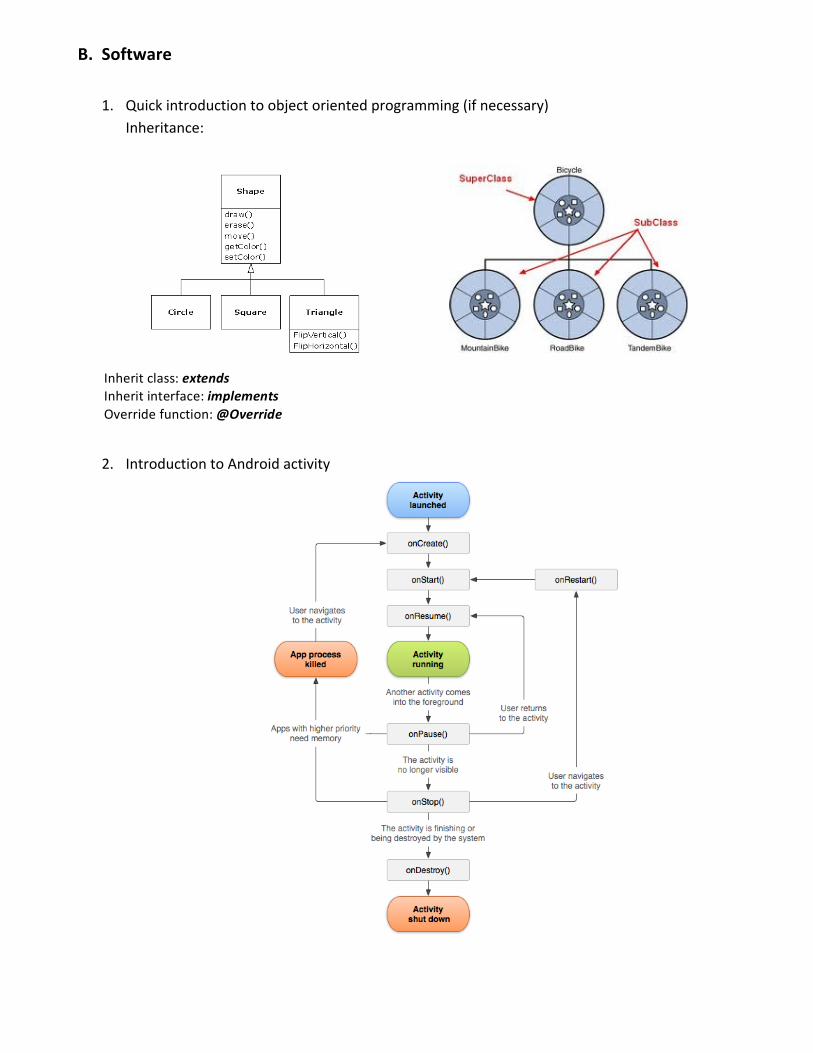
B. Software1. Quickintroductiontoobjectorientedprogramming(ifnecessary)
Inheritance:
2. IntroductiontoAndroidactivity
Inheritclass:extends
Inheritinterface:implements
Overridefunction:@Override

22UCIRescueRobotics2014-2015-Groundrobotmanual
3. OpenAndroidStudio
• Chooseworkspacelocation(e.g.whereyoucopiedtheIOIOlibraries)
4. ImportIOIOlibrariesandprojects
5. OpenIOIOSimpleAppproject• DescriptionofthedifferentAndroidprojectfiles• DescriptionoftheIOIOSimpleAppactivityandIOIOlibrary(PWMoutput,analoginput)
6. ModifytheIOIOSimpleAppactivitytoreadananalogvaluefromthesonarandcontroltheservo
connectedtotheIOIO.Displaytheactualrangeininchesdetectedbythesonar.
7. Ifthereistime:• explaindifferentmodesofmotorcontroller(seeRoboClawdocumentation)• ChooseRCmode• Mountplateonrobot• Connectthemotorstothecontrollerusing14AWGwires• Modifytheappthecontrolthemotorsusingtheslider/seekbar
Formoreexamples,goto:
• https://github.com/UCI-ABR
• SearchforIOIOtutorials/examplesonline
23UCIRescueRobotics2014-2015-Groundrobotmanual
VII. DOCUMENTATION
Androidbasedrobotics
• http://www.socsci.uci.edu/~jkrichma/ABR/• https://groups.google.com/forum/?hl=en#!forum/android-based-robotics• https://github.com/UCI-ABR
Android
• http://developer.android.com/about/index.html• http://developer.android.com/sdk/index.html• Tonsoffreetutorialsandonlinecourses(Coursera…)
IOIOOTG
• https://github.com/ytai/ioio/wiki• https://groups.google.com/forum/#!forum/ioio-users• https://www.sparkfun.com/tutorials/280• https://github.com/ytai/ioio/wiki/Supported-Devices• Also,takealookat:IOIOScript,Protocoder,B4A(BasicforAndroid)forprogramming
ArduinoMEGAADKR3
• http://developer.android.com/tools/adk/index.html
SonarsLVMaxSonarEZ0:
• http://www.maxbotix.com/documents/MB1000_Datasheet.pdf• http://www.maxbotix.com/tutorials.htm
Robotchassis(WildThumper6WD):
• https://www.dropbox.com/s/k37afb8v6qr3ly5/4WD%206WD%20short%20manual.pdf?dl=0
Highpowerswitch
• http://www.jameco.com/Jameco/Products/ProdDS/2150521.pdf• http://letsmakerobots.com/content/high-power-switch
Motorcontroller(RoboClaw2x30A):
• http://downloads.orionrobotics.com/downloads/datasheets/roboclaw_user_manual.pdf• http://www.pololu.com/product/2393
ComputervisionlibrariesforAndroid
• http://opencv.org/platforms/android.html• https://developer.qualcomm.com/mobile-development/add-advanced-features/computer-vision-fastcv
ROSAndroid
• http://wiki.ros.org/android
24UCIRescueRobotics2014-2015-Groundrobotmanual
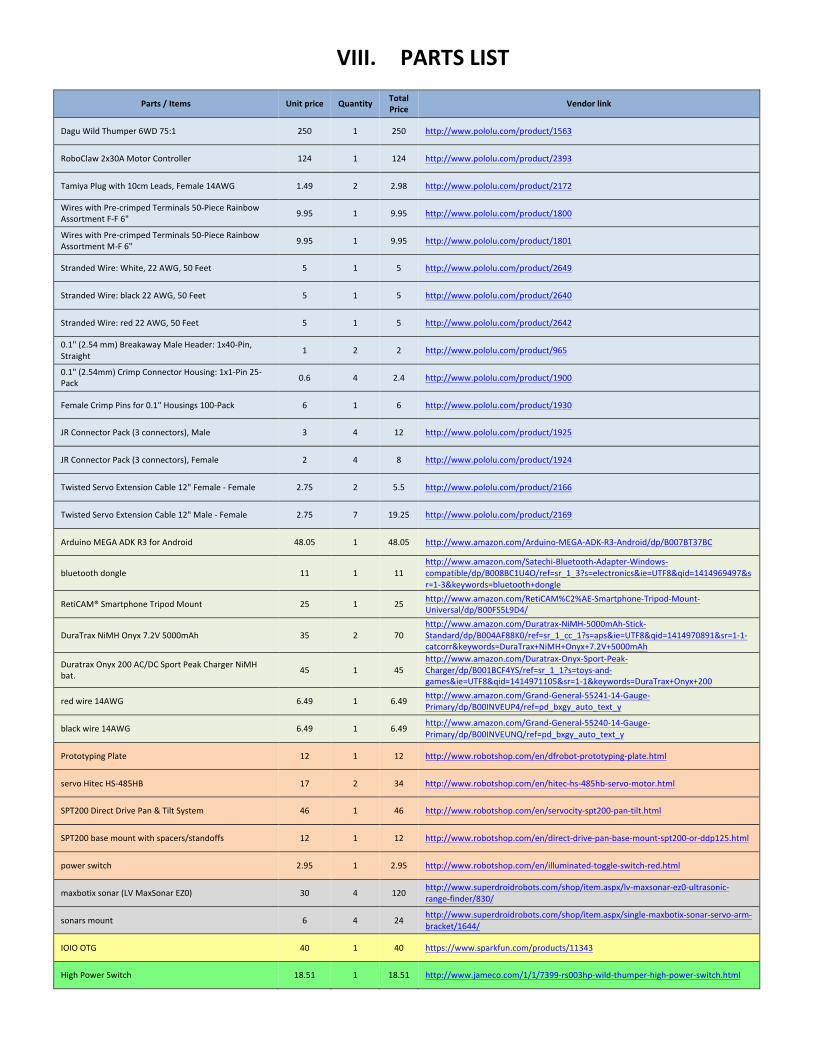
VIII. PARTSLIST
Parts/Items Unitprice Quantity TotalPrice Vendorlink
DaguWildThumper6WD75:1 250 1 250 http://www.pololu.com/product/1563
RoboClaw2x30AMotorController 124 1 124 http://www.pololu.com/product/2393
TamiyaPlugwith10cmLeads,Female14AWG 1.49 2 2.98 http://www.pololu.com/product/2172
WireswithPre-crimpedTerminals50-PieceRainbowAssortmentF-F6" 9.95 1 9.95 http://www.pololu.com/product/1800
WireswithPre-crimpedTerminals50-PieceRainbowAssortmentM-F6" 9.95 1 9.95 http://www.pololu.com/product/1801
StrandedWire:White,22AWG,50Feet 5 1 5 http://www.pololu.com/product/2649
StrandedWire:black22AWG,50Feet 5 1 5 http://www.pololu.com/product/2640
StrandedWire:red22AWG,50Feet 5 1 5 http://www.pololu.com/product/2642
0.1"(2.54mm)BreakawayMaleHeader:1x40-Pin,Straight 1 2 2 http://www.pololu.com/product/965
0.1"(2.54mm)CrimpConnectorHousing:1x1-Pin25-Pack 0.6 4 2.4 http://www.pololu.com/product/1900
FemaleCrimpPinsfor0.1"Housings100-Pack 6 1 6 http://www.pololu.com/product/1930
JRConnectorPack(3connectors),Male 3 4 12 http://www.pololu.com/product/1925
JRConnectorPack(3connectors),Female 2 4 8 http://www.pololu.com/product/1924
TwistedServoExtensionCable12"Female-Female 2.75 2 5.5 http://www.pololu.com/product/2166
TwistedServoExtensionCable12"Male-Female 2.75 7 19.25 http://www.pololu.com/product/2169
ArduinoMEGAADKR3forAndroid 48.05 1 48.05 http://www.amazon.com/Arduino-MEGA-ADK-R3-Android/dp/B007BT37BC
bluetoothdongle 11 1 11http://www.amazon.com/Satechi-Bluetooth-Adapter-Windows-compatible/dp/B008BC1U4O/ref=sr_1_3?s=electronics&ie=UTF8&qid=1414969497&sr=1-3&keywords=bluetooth+dongle
RetiCAM®SmartphoneTripodMount 25 1 25 http://www.amazon.com/RetiCAM%C2%AE-Smartphone-Tripod-Mount-Universal/dp/B00FS5L9D4/
DuraTraxNiMHOnyx7.2V5000mAh 35 2 70http://www.amazon.com/Duratrax-NiMH-5000mAh-Stick-Standard/dp/B004AF88K0/ref=sr_1_cc_1?s=aps&ie=UTF8&qid=1414970891&sr=1-1-catcorr&keywords=DuraTrax+NiMH+Onyx+7.2V+5000mAh
DuratraxOnyx200AC/DCSportPeakChargerNiMHbat. 45 1 45
http://www.amazon.com/Duratrax-Onyx-Sport-Peak-Charger/dp/B001BCF4YS/ref=sr_1_1?s=toys-and-games&ie=UTF8&qid=1414971105&sr=1-1&keywords=DuraTrax+Onyx+200
redwire14AWG 6.49 1 6.49 http://www.amazon.com/Grand-General-55241-14-Gauge-Primary/dp/B00INVEUP4/ref=pd_bxgy_auto_text_y
blackwire14AWG 6.49 1 6.49 http://www.amazon.com/Grand-General-55240-14-Gauge-Primary/dp/B00INVEUNQ/ref=pd_bxgy_auto_text_y
PrototypingPlate 12 1 12 http://www.robotshop.com/en/dfrobot-prototyping-plate.html
servoHitecHS-485HB 17 2 34 http://www.robotshop.com/en/hitec-hs-485hb-servo-motor.html
SPT200DirectDrivePan&TiltSystem 46 1 46 http://www.robotshop.com/en/servocity-spt200-pan-tilt.html
SPT200basemountwithspacers/standoffs 12 1 12 http://www.robotshop.com/en/direct-drive-pan-base-mount-spt200-or-ddp125.html
powerswitch 2.95 1 2.95 http://www.robotshop.com/en/illuminated-toggle-switch-red.html
maxbotixsonar(LVMaxSonarEZ0) 30 4 120 http://www.superdroidrobots.com/shop/item.aspx/lv-maxsonar-ez0-ultrasonic-range-finder/830/
sonarsmount 6 4 24 http://www.superdroidrobots.com/shop/item.aspx/single-maxbotix-sonar-servo-arm-bracket/1644/
IOIOOTG 40 1 40 https://www.sparkfun.com/products/11343
HighPowerSwitch 18.51 1 18.51 http://www.jameco.com/1/1/7399-rs003hp-wild-thumper-high-power-switch.html