tyre shear force and moment descriptions and the ‘‘magic
TRANSCRIPT

Vehicle System Dynamics 0042-3114/03/3901-027$16.002003, Vol. 39, No. 1, pp. 27–56 # Swets & Zeitlinger
Tyre Shear Force and Moment Descriptions
by Normalisation of Parameters
and the ‘‘Magic Formula’’
R.S. SHARPy,* AND M. BETTELLAy
SUMMARY
Previous work by Radt on the use of normalised parameters to bring economy to the task of measuring,
describing and computing tyre shear forces and parallel works of Pacejka on the ‘similarity method’ are
reviewed, extended and applied. Similarity ideas are used in association with the ‘Magic Formula’. Some
published tyre force and moment results are divided into basic and nonbasic sets. The basic set contains a
notional minimum amount of information from which the full spectrum of results can be obtained by
applying similarity ideas. Calculations are carried out to show how the nonbasic results can be reconstructed
from the basic set. Advantages are obtained by using a novel nonlinear transformation of the longitudinal
and sideslip variables. The results are shown to be qualitatively excellent and quantitatively quite good. Of
course, the accuracy is not as high as with a full Magic Formula treatment but the economy is remarkable.
The process is captured in a MATLAB algorithm, included as an appendix. It is thought that this provides a
useful facility for enabling vehicle dynamics studies of a more generic flavour, in which circumstances
conspire to make high precision of tyre force descriptions inappropriate or impossible.
NOMENCLATURE
a1. . .a7 secondary Magic Formula coefficients
B, C, D, E primary Magic Formula parameters�BB, �CC, �DD, �EE normalised Magic Formula parameters
c�, c� variables in the slip transformations
Ccx tyre longitudinal carcass stiffness
Ccy tyre lateral carcass stiffness
CF� tyre cornering stiffness; function of load
CF� tyre camber stiffness; function of load
CF� tyre longitudinal slip stiffness; function of load
CM� tyre aligning moment stiffness; function of load
* Address correspondence to: R.S. Sharp, Electrical and Electronic Engineering, Imperial College of Science,
Engineering and Medicine, Exhibition Road, London SW7 2BT, U.K. E-mail: [email protected] School of Engineering, Cranfield University, U.K.

f�, f� functions used in slip transformations
Fx tyre longitudinal force
Fy tyre lateral force
Fy0 tyre lateral force for no longitudinal slip, used in
aligning moment calculations
Fz tyre load
Fx max maximum longitudinal force for no sideslip or camber;
function of load
Fy max maximum lateral force for free rolling and no camber;
function of load�FFx ¼ Fx=Fx max normalised longitudinal force�FFy ¼ Fy=Fy max normalised lateral force
�FFs ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�FF2
x þ �FF2y
qnormalised tyre shear force magnitude for combined slip
g1 constant relating to the influence of camber on peak
sideforce
int�, int� intercept variables in the slip transformations
m�, m� slope variables in the slip transformations
Mz tyre aligning moment
Mz max maximum aligning moment for free rolling and no
camber; function of load�MMz ¼ Mz=Mz max normalised aligning moment
Re tyre rolling radius
Sv vertical shift in Magic Formula
X, x, Y, y slip and force parameters in the Magic Formula
xp slip value for peak force
u forward velocity of tyre centre
� sideslip angle, slip angle
�p sideslip angle for peak sideforce
�Feq equivalent sideslip parameter, accounting for wheel
camber
� camber angle
� longitudinal slip, long slip, slip ratio
�p longitudinal slip for peak braking force
��� ¼ CF� � tan�=Fy max normalised sideslip parameter
���Feq normalised equivalent sideslip parameter for lateral
force, accounting for wheel camber
��� ¼ CF� � �=Fx max normalised longitudinal slip��� ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi�Feq
2 þ ���2p
Þ normalised combined slip���p normalised combined slip for which the force is a
maximum
� function of ���, defining Fx=Fy ratio in combined slip
28 R.S. SHARP AND M. BETTELLA

�0 ¼ �j ��� ¼ CF� � Fxmax
CF� � Fymax
function of load;
� tyre spin velocity
1. INTRODUCTION
In respect to the longitudinal and lateral motions of road vehicles, the dominant
component of the external force system is from tyre=road frictional interactions. In
simulating such motions, it is crucial to represent the tyre shear forces with an
accuracy commensurate with the objectives of the simulation and in keeping with the
degree of detail in the treatment of the mass and the mass distribution of the vehicle.
Potentially, tyre force and moment computations are substantial consumers of
simulation time, such that they are virtually never calculated from a fundamental
physical tyre model, within a vehicle simulation, but rather via some empirical
method. The tyre shear force determination and the vehicle simulation are decoupled
in the interests of efficiency. Steady-state tyre forces and moments are regarded as
known functions of longitudinal slip, lateral slip, load, camber angle and possibly
inflation pressure and=or friction coefficient [1–5]. Additional relations may or may
not be included to accommodate tyre transient behaviour.
Contemporary alternative means for describing steady-state properties embrace
Magic Formula methods [6–13], the ‘‘HSRI’’ method [14], the ‘‘STI’’ method [15],
Radt’s methods [4, 16, 17] and Lugner’s method [18] among others. As can be judged
from the number of recent publications on the subject, the Magic Formula methods
are dominant, especially in Europe, and they are systematically gaining ground. They
can be characterised as powerful in terms of capacity for accuracy, time consuming in
terms of computation and very demanding in terms of parameters. The number of
parameters involved and their nature make the tyre testing necessary to derive their
values, lengthy, destructive of tyres themselves, expensive and very specialised.
Optimisation routines may well be needed to identify the parameters.1
In view of the robustness requirements of a vehicle=tyre combination in practice,
many studies in vehicle dynamics need a generically good representation of tyre shear
forces but they are not allied to a particular combination of vehicle, road surface, tyre
make, tyre pressure, tyre=surface temperature and state of wear. The capability of the
full Magic Formula method to rather precisely replicate extensive measurement
results is of little value in such circumstances. Advantages would come from having a
model with many fewer parameters, that are much more easily identified, and that
computes faster.
1 See http://www.automotive.tno.nl/vehicle dynamics; http://www.smithers-scientific.com/vehicle4
TYRE SHEAR FORCE 29

Radt’s ‘nondimensionalisation’ offers such possibilities [4, 16, 17]. Pacejka’s
‘similarity method’ [1, 10] provides an alternative. Normalisation of load and slip
variables is at the core of each scheme. The contention is that many relationships
become one and the same when expressed in normalised form and that the parameters
of the relationships can be determined from comparatively little test data. This paper
is an account of a test of normalisation, allied to the use of the Magic Formula, using
tyre test data from [6]. A portion of the test results included in [6] is used to construct
a full range of forces and moments. These forces and moments can be compared with
those measured ones not used in their prediction. The normalisation process is
necessarily developed, so that a full spectrum of results can be obtained, and useful
information is generated on the trading off of tyre test complexity and cost, parameter
evaluation complexity and accuracy of description of the forces and moments.
2. THE MAGIC FORMULA AND NORMALISATION OF PARAMETERS
The independent variables to be considered are longitudinal slip, �, lateral slip, tan�,
wheel load, Fz, and camber angle, �. Steady-state operation at constant tyre pressure
on a surface of constant friction properties will be presumed. The dependent variables
are longitudinal force, Fx, lateral force, Fy, and aligning moment, Mz. The Magic
Formula originates from [6] and the whole method based on it has moved through
several evolutions subsequently [7–13]. The formula itself is:
yðxÞ ¼ D sin½C arctanfBx EðBx arctanðBxÞÞg� with YðXÞ ¼ yðxÞþþ Sv and x ¼ X þ Sh ð1Þ
In the formula, Y(X) can be sideforce, longitudinal force or aligning moment while
(X) is the longitudinal slip or the sideslip. The longitudinal slip is a measure of the
tyre’s departure from free rolling. It is the ratio of the tread base material’s rearward
velocity and the modulus of the wheel centre forward velocity, given by:
� ¼ ðu þ Re � �Þ=juj ð2Þ
where Re is the tyre’s rolling radius, � is its spin velocity and u is the forward velocity
of its centre. At free rolling, �¼ 0, while for the locked wheel, �¼1. For a spinning
wheel, � will be positive and may rise without limit. The sideslip is the tangent of the
ratio of the negative of the lateral velocity of the notional centre of the contact patch to
the modulus of the forward velocity of the wheel centre. These definitions align with
SAE standards [19].
The basis of the formula is the idea that tyre force and moment curves under pure
slip conditions look like sine curves modified by stretching out the slip values using an
arctangent function. Figure 1 illustrates the relationship between the coefficients in
30 R.S. SHARP AND M. BETTELLA
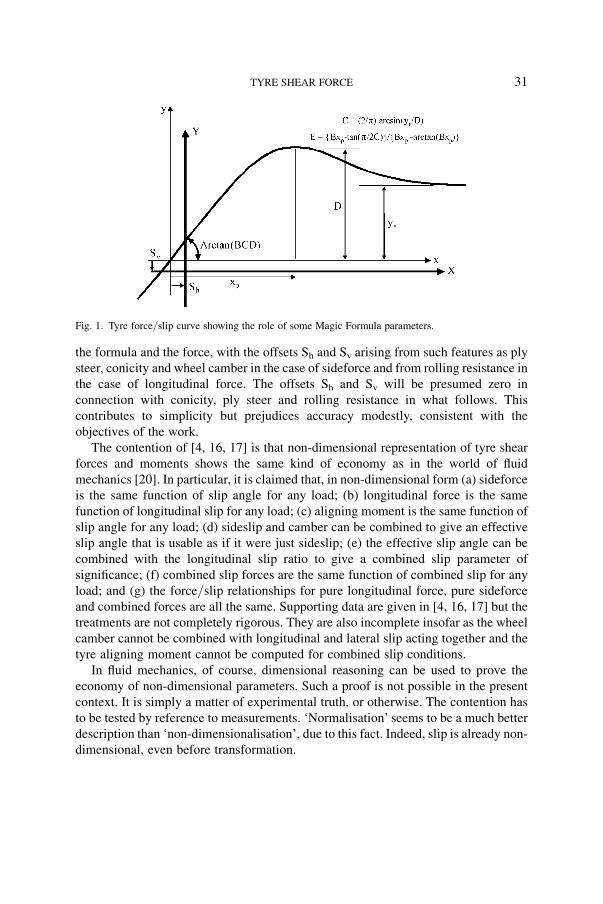
the formula and the force, with the offsets Sh and Sv arising from such features as ply
steer, conicity and wheel camber in the case of sideforce and from rolling resistance in
the case of longitudinal force. The offsets Sh and Sv will be presumed zero in
connection with conicity, ply steer and rolling resistance in what follows. This
contributes to simplicity but prejudices accuracy modestly, consistent with the
objectives of the work.
The contention of [4, 16, 17] is that non-dimensional representation of tyre shear
forces and moments shows the same kind of economy as in the world of fluid
mechanics [20]. In particular, it is claimed that, in non-dimensional form (a) sideforce
is the same function of slip angle for any load; (b) longitudinal force is the same
function of longitudinal slip for any load; (c) aligning moment is the same function of
slip angle for any load; (d) sideslip and camber can be combined to give an effective
slip angle that is usable as if it were just sideslip; (e) the effective slip angle can be
combined with the longitudinal slip ratio to give a combined slip parameter of
significance; (f) combined slip forces are the same function of combined slip for any
load; and (g) the force=slip relationships for pure longitudinal force, pure sideforce
and combined forces are all the same. Supporting data are given in [4, 16, 17] but the
treatments are not completely rigorous. They are also incomplete insofar as the wheel
camber cannot be combined with longitudinal and lateral slip acting together and the
tyre aligning moment cannot be computed for combined slip conditions.
In fluid mechanics, of course, dimensional reasoning can be used to prove the
economy of non-dimensional parameters. Such a proof is not possible in the present
context. It is simply a matter of experimental truth, or otherwise. The contention has
to be tested by reference to measurements. ‘Normalisation’ seems to be a much better
description than ‘non-dimensionalisation’, due to this fact. Indeed, slip is already non-
dimensional, even before transformation.
Fig. 1. Tyre force=slip curve showing the role of some Magic Formula parameters.
TYRE SHEAR FORCE 31
After removing the offsets, D is the peak value. C determines the part of the basic
sine curve used, while B controls the extent of the ‘stretching out’ in the x direction. C
is related to the asymptote ya by:
ya ¼ D sinðC�=2Þ ð3Þ
which can be rearranged to give:
C ¼ ð2=�Þ asinðya=DÞ ð4Þ
BCD is the slope at the origin (the longitudinal slip stiffness, the cornering stiffness or
the aligning stiffness for each of the three cases; longitudinal force=slip ratio,
sideforce=sideslip, aligning moment=sideslip, respectively). This leads to B being
called the ‘stiffness’ factor. E determines the sharpness of the transition from the
adhesion dominated to the sliding dominated region, so that E is referred to as the
‘curvature’ factor. E is related to the slip (xp) at which the ‘force’ is a maximum [8] by:
E ¼ fBxp tanð�=2CÞg=fBxp atanðBxpÞg
Thus, given a sideforce=slip angle curve from experimental trials (or the equivalent
longitudinal force=slip curve), the peak value can be used to yield D, after which the
asymptote gives C and the cornering stiffness gives B. E then comes from xp, the slip
at which the force is the greatest.
For the determination of C, the asymptote to the peak force ratio, ya=D, needs to be
known, implying the need for significant testing at a very high slip. This is very
demanding of rigs and destructive of test tyres, so ya=D may not be known with any
precision in practice. Further, the high slip behaviour, being dependent on frictional
coupling between rubber and surface, is most likely to vary with surface, temperature,
speed and direction (braking or driving). Consequently, it is something of an act of
faith to employ the inevitably limited tyre rig data to the prediction of field results.
Some degree of estimation is involved, however much expenditure of time and
resource occurs. In many vehicle simulation cases, the behaviour of the tyres well
beyond their peak force capabilities will not be of much concern anyway. Inordinate
trouble in the matter will not be warranted. Partly due to these factors, C may be
considered constant, 1.65 for the longitudinal force, 1.3 for the sideforce and 2.4 for
the aligning moment [6]. In [4], a master curve for shear force has C¼ 1.4, while that
for the aligning moment has C¼ 2.3. B, D and E are functions of load on the tyre.
In the original Magic Formula paper [6], the measured longitudinal force against
slip ratio, the sideforce against sideslip and the aligning moment against sideslip were
given for loads of 2, 4, 6 and 8 kN over a full range of pure slips, for what will be
referred to as the ‘nominal’ tyre. Brake force, sideforce and aligning moment were
also given, for 2 and 5 degrees sideslip and a full range of braking slips, ostensibly for
the nominal tyre at one pressure (but see later comments). Twenty-three coefficients
enabling the Magic Formula to match that experimental data closely were also given.
32 R.S. SHARP AND M. BETTELLA

Measurements at modest camber angles were also made but raw results were not
included. However, eight more coefficients related to camber influences were given.
These enable sideforces and aligning torques, including wheel camber effects but for
no longitudinal slip, to be calculated from the formulae. It seems not unreasonable to
regard these computed forces and moments as accurately reproducing the original
(not included) measurements. Later papers on the Magic Formula have not included
tyre force and moment measured results, but have extended the method so that forces
and moments can be obtained for completely general running conditions.
Following Radt [4] and Pacejka [1, 10], the longitudinal force, for any load, is
normalised by dividing by its maximum value for that load, for zero camber and
sideslip. Likewise, the sideforce is normalised by dividing by the maximum lateral
force for the relevant load, for zero camber and free rolling. Similarly, as in Pacejka’s
work, but not in that of Radt, the aligning moment for a given load, is normalised by
dividing by the maximum moment, for free rolling and zero camber, for that load.
Mathematically:
�FFx ¼Fx
Fx max
; �FFy ¼Fy
Fy max
; �MMz ¼Mz
Mz max
ð5Þ
Slip normalisations follow Radt, not Pacejka, although Pacejka’s later method [10] is
only marginally different. The longitudinal slip, for a certain load, is normalised by
multiplying the corresponding longitudinal slip stiffness and dividing by Fxmax.
Similarly, the normalised sideslip is given by multiplying the tangent of the sideslip
angle by the cornering stiffness CF� divided by Fymax. That is:
��� ¼ Cf� � �=Fx max; ��� ¼ Cf� � tan�=Fy max ð6Þ
If the normalised longitudinal force is represented as a function of the normalised
longitudinal slip, using the Magic Formula, automatically �DD ¼ 1, while the
parameters �CC and �EE are unchanged from C and E, respectively, by the normalisation
[10]. Also since
�BB � �CC � �DD ¼ d�FFx
d���
� ����!0
¼ d�FFx
dFx
� dFx
d�� d�
d���
� ����!0
¼ 1
Fx max
� CF� �Fx max
CF�¼ 1; it follows that �BB ¼ 1=�CC ð7Þ
Similar arguments apply to the lateral force and the aligning moment, giving the same
results.
The influence of wheel camber on the free rolling, sideslipping tyre, at the modest
camber angles appropriate to cars, is (1) to superimpose a camber thrust on the lateral
force for small slip angles; (2) to influence the peak force obtainable (leaning into a
turn, motorcycle style, is helpful); (3) to marginally reduce the cornering stiffness; and
TYRE SHEAR FORCE 33
(4) to vary marginally the sideslip for which the maximum sideforce is obtained
[6–13]. Within the confines of the normalisation scheme, it is feasible to represent only
the first two of these effects, since no freedom exists to alter �BB and �EE independently.
The camber thrust can be added by using an equivalent sideslip angle �Feq instead of �where �Feq ¼ �þ �ðCF� þ g1 � FzÞ=CF�. In Magic Formula terms, this is a horizontal
shift, Sh. The peak force influence can be included through a vertical shift g1 � Fz � �.
Other influences of the camber, for example, on the aligning moment are considered
negligible. To include the camber, �Feq is treated exactly as was � previously.
For the combined longitudinal slip and sideslip, a normalised combined slip
parameter is defined by:
��� ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi���Feq
2 þ ���2
qð8Þ
and the normalised force, �FFs, is calculated as the same function of ��� as the sideforce is
of the sideslip and the longitudinal force is of the longitudinal slip, given by the Magic
Formula, with parameters derived from the pure slip characteristics. To find the lateral
and longitudinal force components, the parameter �, function of ���, is introduced,
given in [4] as:
�ð ���Þ ¼ 0:5:ð1 þ �0Þ 0:5:ð1 �0Þ cosð ���=2Þ for j ���j42� or 1
for j ���j > 2� : ð9Þ
with �0 defined as, Cf� � Fxmax=ðCf� � FymaxÞ. Then, Fx and Fy are found from:
Fx ¼ Fx max � �FFsð���Þ�ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
�2 þ ½�ð���Þ�2 tan2 �Feq
q8><>:
9>=>; and
Fy ¼ �ð ���Þ � Fy max � �FFsð���Þtan�Feqffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
�2 þ ½�ð���Þ�2 tan2 �Feq
q8><>:
9>=>; ð10Þ
When the slips are small, the tyre=road contact is characterised by adhesion and its
shear force system derives from the carcass stiffness properties. In such cases, the ratio
of longitudinal to lateral force is given by: � � CF�=ð�Feq � CF�Þ corresponding to
superposition. Conversely, for high slips, the forces are scaled in proportion to the
maximum forces, the ratio being: � � Fxmax=ðtan�Feq � FymaxÞ. The function � governs
the transition from one extreme to the other, obliging the transition to be smooth.
To obtain the aligning moment for combined slip, the moment for lateral slip and
only camber is calculated first. Then, it is multiplied by the square of the ratio of the
lateral force Fy to the corresponding lateral force for no longitudinal slip, Fy0, and a
term proportional to Fx � Fy=Cf� is added, the constant of proportionality being
34 R.S. SHARP AND M. BETTELLA

found by trial and error [10]. The force ratio term describes the process by which the
increasing longitudinal slip causes sliding from the rear of the contact patch, ensuring
that the forces there are primarily longitudinal rather than lateral and diminishing the
aligning moment correspondingly. The added term accounts for carcass compliances
[10] which lead (1) to the lateral force deforming the tyre laterally, giving rise to a
moment from the longitudinal force; and (2) to the longitudinal force influencing the
load distribution through the contact length and thereby the moment arising from
lateral forces. Division by the cornering stiffness accommodates in a simple way
changes in the carcass stiffnesses with loading. As the load increases, so does the
cornering stiffness and the lateral stiffness, until the carcass buckles, after which the
reverse process occurs.2
3. NORMALISED PARAMETER TREATMENT OF SHEAR FORCE
AND MOMENT DATA
3.1. Data Summary
The coefficient values for the nominal tyre from [6] relied upon, converted into SI
units from the original, are given in Table 1.
Secondary coefficients from [6] are sufficient to define the camber stiffnesses
for each standard load and the main influence of the camber on the sideforce peak
is expressed there in the relationship Sv¼ 0.848 � Fz � � (0.848, called g1 above, is
the coefficient a11 in [6] converted into SI units). The camber stiffnesses for the
nominal tyre are 648.3, 1780.2, 3341.9 and 5107.7 N=rad for 2, 4, 6 and 8 kN load,
respectively.
The preferred relationships giving the primary coefficients as functions of tyre load
are:
D ¼ a1 � F2z þ a2 � Fz;
BCD ¼ a3 � sinð2 � atanðFz=a4ÞÞ for the sideforce; ðthis is CF�Þ3
BCD ¼ fFzða3 � Fz þ a4Þg= expða5 � FzÞ for longitudinal force and
self aligning moment; ðthese are CF� and CM�ÞCF� ¼ a6 � F2
z þ a7 � Fz; ð11Þ
�p and �p are linearly related to the wheel load.
�p ¼ 0:13 6:5e 6 � Fz and �p ¼ 0:0786 þ 1:657e 5 � Fz: ð12Þ2 In numerical trials, this term has been found not to make a useful contribution, so the coefficient has been
set to zero.3 This is revised from the original in [6] and can be found in [7] and later versions of the formula.
TYRE SHEAR FORCE 35
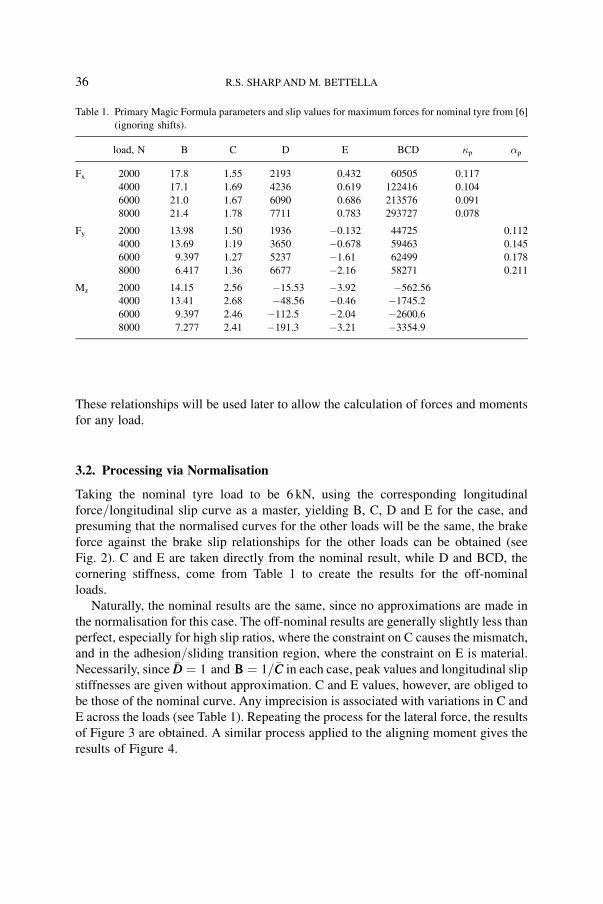
These relationships will be used later to allow the calculation of forces and moments
for any load.
3.2. Processing via Normalisation
Taking the nominal tyre load to be 6 kN, using the corresponding longitudinal
force=longitudinal slip curve as a master, yielding B, C, D and E for the case, and
presuming that the normalised curves for the other loads will be the same, the brake
force against the brake slip relationships for the other loads can be obtained (see
Fig. 2). C and E are taken directly from the nominal result, while D and BCD, the
cornering stiffness, come from Table 1 to create the results for the off-nominal
loads.
Naturally, the nominal results are the same, since no approximations are made in
the normalisation for this case. The off-nominal results are generally slightly less than
perfect, especially for high slip ratios, where the constraint on C causes the mismatch,
and in the adhesion=sliding transition region, where the constraint on E is material.
Necessarily, since �DD ¼ 1 and BB ¼ 1=�CC in each case, peak values and longitudinal slip
stiffnesses are given without approximation. C and E values, however, are obliged to
be those of the nominal curve. Any imprecision is associated with variations in C and
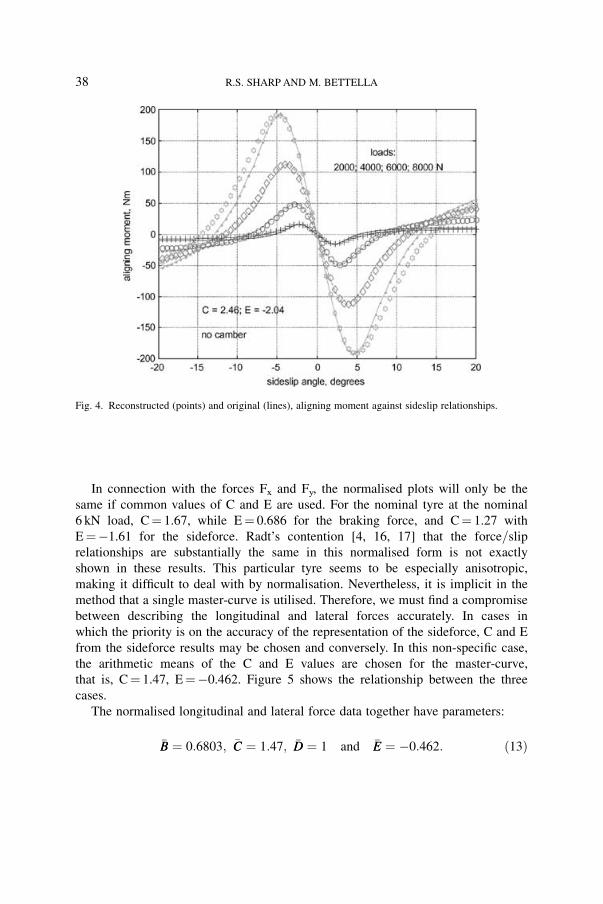
E across the loads (see Table 1). Repeating the process for the lateral force, the results
of Figure 3 are obtained. A similar process applied to the aligning moment gives the
results of Figure 4.
Table 1. Primary Magic Formula parameters and slip values for maximum forces for nominal tyre from [6]
(ignoring shifts).
load, N B C D E BCD �p �p
Fx 2000 17.8 1.55 2193 0.432 60505 0.117
4000 17.1 1.69 4236 0.619 122416 0.104
6000 21.0 1.67 6090 0.686 213576 0.091
8000 21.4 1.78 7711 0.783 293727 0.078
Fy 2000 13.98 1.50 1936 0.132 44725 0.112
4000 13.69 1.19 3650 0.678 59463 0.145
6000 9.397 1.27 5237 1.61 62499 0.178
8000 6.417 1.36 6677 2.16 58271 0.211
Mz 2000 14.15 2.56 15.53 3.92 562.56
4000 13.41 2.68 48.56 0.46 1745.2
6000 9.397 2.46 112.5 2.04 2600.6
8000 7.277 2.41 191.3 3.21 3354.9
36 R.S. SHARP AND M. BETTELLA
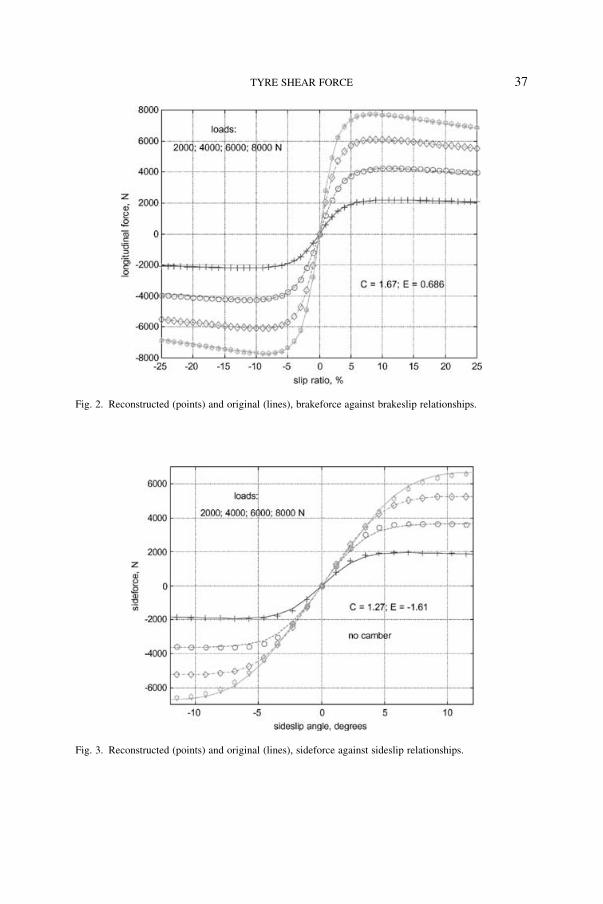
Fig. 2. Reconstructed (points) and original (lines), brakeforce against brakeslip relationships.
Fig. 3. Reconstructed (points) and original (lines), sideforce against sideslip relationships.
TYRE SHEAR FORCE 37
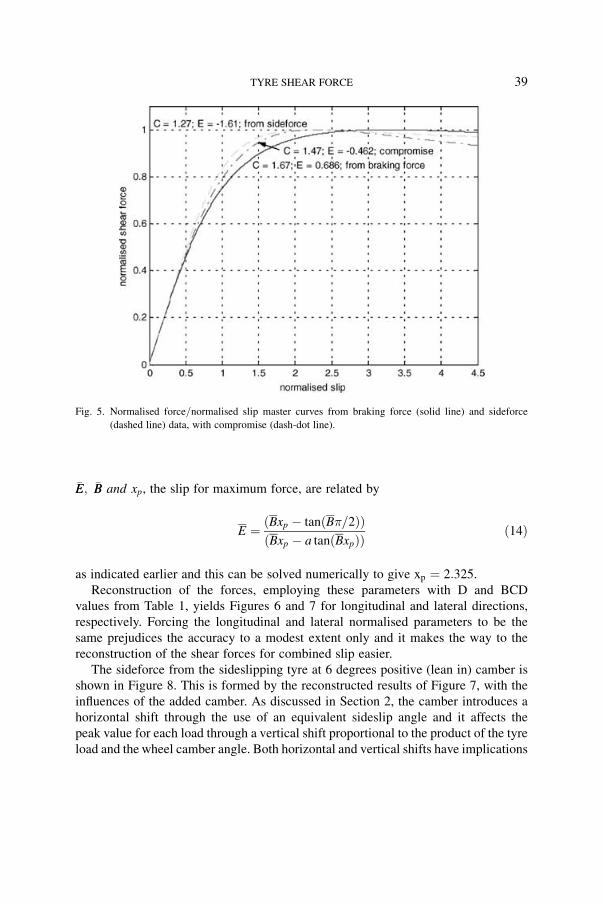
In connection with the forces Fx and Fy, the normalised plots will only be the
same if common values of C and E are used. For the nominal tyre at the nominal
6 kN load, C¼ 1.67, while E¼ 0.686 for the braking force, and C¼ 1.27 with
E¼1.61 for the sideforce. Radt’s contention [4, 16, 17] that the force=slip
relationships are substantially the same in this normalised form is not exactly
shown in these results. This particular tyre seems to be especially anisotropic,
making it difficult to deal with by normalisation. Nevertheless, it is implicit in the
method that a single master-curve is utilised. Therefore, we must find a compromise
between describing the longitudinal and lateral forces accurately. In cases in
which the priority is on the accuracy of the representation of the sideforce, C and E
from the sideforce results may be chosen and conversely. In this non-specific case,
the arithmetic means of the C and E values are chosen for the master-curve,
that is, C¼ 1.47, E¼0.462. Figure 5 shows the relationship between the three
cases.
The normalised longitudinal and lateral force data together have parameters:
�BB ¼ 0:6803; �CC ¼ 1:47; �DD ¼ 1 and �EE ¼ 0:462: ð13Þ
Fig. 4. Reconstructed (points) and original (lines), aligning moment against sideslip relationships.
38 R.S. SHARP AND M. BETTELLA
�EE; �BB and xp, the slip for maximum force, are related by
E ¼ ðBxp tanðB�=2ÞÞðBxp a tanðBxpÞÞ
ð14Þ
as indicated earlier and this can be solved numerically to give xp ¼ 2:325.
Reconstruction of the forces, employing these parameters with D and BCD
values from Table 1, yields Figures 6 and 7 for longitudinal and lateral directions,
respectively. Forcing the longitudinal and lateral normalised parameters to be the
same prejudices the accuracy to a modest extent only and it makes the way to the
reconstruction of the shear forces for combined slip easier.
The sideforce from the sideslipping tyre at 6 degrees positive (lean in) camber is
shown in Figure 8. This is formed by the reconstructed results of Figure 7, with the
influences of the added camber. As discussed in Section 2, the camber introduces a
horizontal shift through the use of an equivalent sideslip angle and it affects the
peak value for each load through a vertical shift proportional to the product of the tyre
load and the wheel camber angle. Both horizontal and vertical shifts have implications
Fig. 5. Normalised force=normalised slip master curves from braking force (solid line) and sideforce
(dashed line) data, with compromise (dash-dot line).
TYRE SHEAR FORCE 39
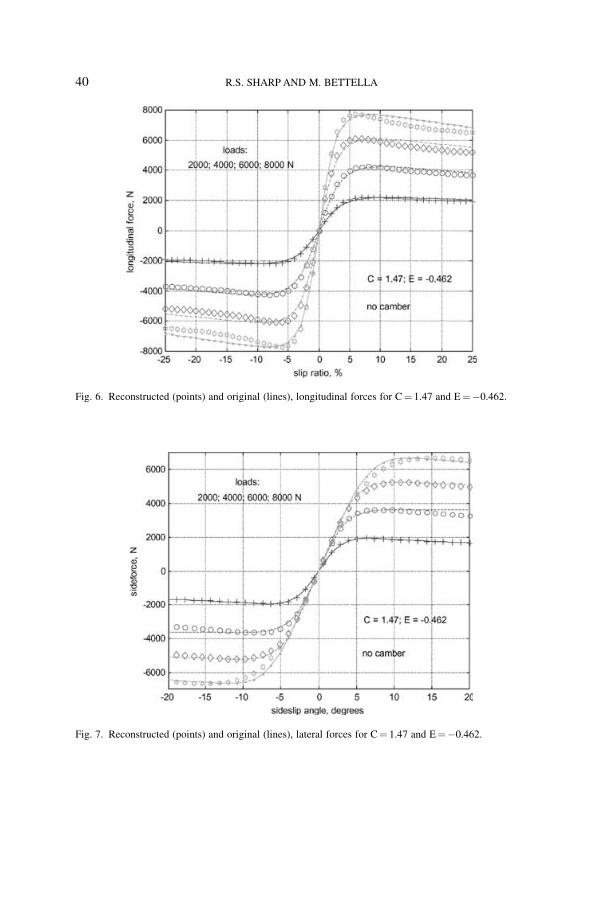
Fig. 6. Reconstructed (points) and original (lines), longitudinal forces for C¼ 1.47 and E¼0.462.
Fig. 7. Reconstructed (points) and original (lines), lateral forces for C¼ 1.47 and E¼0.462.
40 R.S. SHARP AND M. BETTELLA

for the camber stiffness, which we take to be known from the measurements made.
The coefficient g1¼ 0.848, see Section 2, is also taken as known, either by
measurement or a priori knowledge. Then, the horizontal shift implied by converting
the sideslip into an equivalent sideslip including camber is designed to give the
correct tyre camber stiffnesses. The slip angle increment corresponding to unit
camber angle turns out to be:
ðCF� þ g1 � FzÞ=CF�: ð15Þ
Other influences of the camber on the sideforce and on the aligning moment included
in the full Magic Formula [13] are considered insignificant in the present context. A
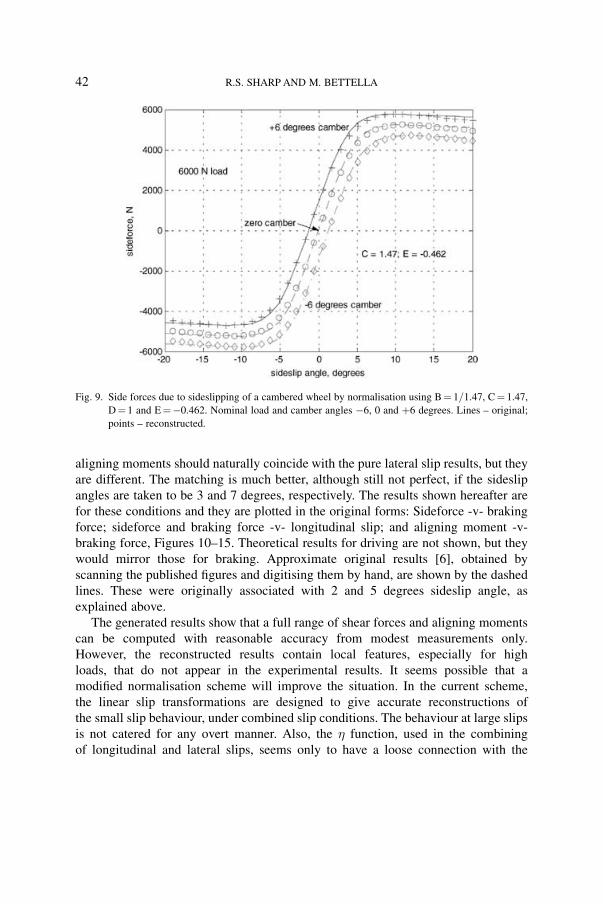
further illustration of the influence of the camber is given in Figure 9, treating the
nominal load and camber angles of 6, 0 and þ6 degrees.
With respect to the comparison of forces and moments under combined slip against
the original measured results [6], a difficulty arises due to certain inconsistencies in
that data. Force and moment results are given for longitudinal slip sweeps at fixed
sideslip angles quoted as 2 and 5 degrees. At zero longitudinal slip, the sideforces and
Fig. 8. Side forces due to sideslipping of a cambered wheel by normalisation using B¼ 1=1.47, C¼ 1.47,
D¼ 1 and E¼0.462. The influences of camber included are (1) through a horizontal shift of the
sideslip ðCF� þ g1 � FzÞ�=CF�; and (2) through a vertical shift g1 �Fz � �. Lines – original; points –
reconstructed.
TYRE SHEAR FORCE 41
aligning moments should naturally coincide with the pure lateral slip results, but they
are different. The matching is much better, although still not perfect, if the sideslip
angles are taken to be 3 and 7 degrees, respectively. The results shown hereafter are
for these conditions and they are plotted in the original forms: Sideforce -v- braking
force; sideforce and braking force -v- longitudinal slip; and aligning moment -v-
braking force, Figures 10–15. Theoretical results for driving are not shown, but they
would mirror those for braking. Approximate original results [6], obtained by
scanning the published figures and digitising them by hand, are shown by the dashed
lines. These were originally associated with 2 and 5 degrees sideslip angle, as
explained above.
The generated results show that a full range of shear forces and aligning moments
can be computed with reasonable accuracy from modest measurements only.
However, the reconstructed results contain local features, especially for high
loads, that do not appear in the experimental results. It seems possible that a
modified normalisation scheme will improve the situation. In the current scheme,
the linear slip transformations are designed to give accurate reconstructions of
the small slip behaviour, under combined slip conditions. The behaviour at large slips
is not catered for any overt manner. Also, the � function, used in the combining
of longitudinal and lateral slips, seems only to have a loose connection with the
Fig. 9. Side forces due to sideslipping of a cambered wheel by normalisation using B¼ 1=1.47, C¼ 1.47,
D¼ 1 and E¼0.462. Nominal load and camber angles 6, 0 and þ6 degrees. Lines – original;
points – reconstructed.
42 R.S. SHARP AND M. BETTELLA
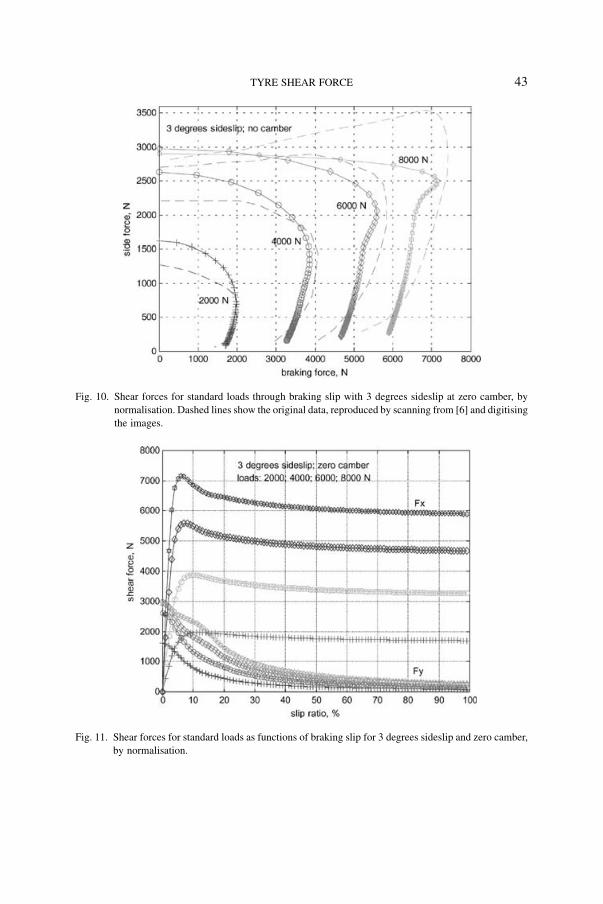
Fig. 10. Shear forces for standard loads through braking slip with 3 degrees sideslip at zero camber, by
normalisation. Dashed lines show the original data, reproduced by scanning from [6] and digitising
the images.
Fig. 11. Shear forces for standard loads as functions of braking slip for 3 degrees sideslip and zero camber,
by normalisation.
TYRE SHEAR FORCE 43

Fig. 12. Aligning moment and longitudinal force for standard loads as functions of braking slip for 3
degrees sideslip and zero camber, by normalisation. Dashed lines show the original data,
reproduced by scanning from [6] and digitising the images.
Fig. 13. Shear forces for standard loads through a complete range of braking slips with 7 degrees sideslip at
zero camber, by normalisation. Dashed lines show the original data, reproduced by scanning from
[6] and digitising the images.
44 R.S. SHARP AND M. BETTELLA
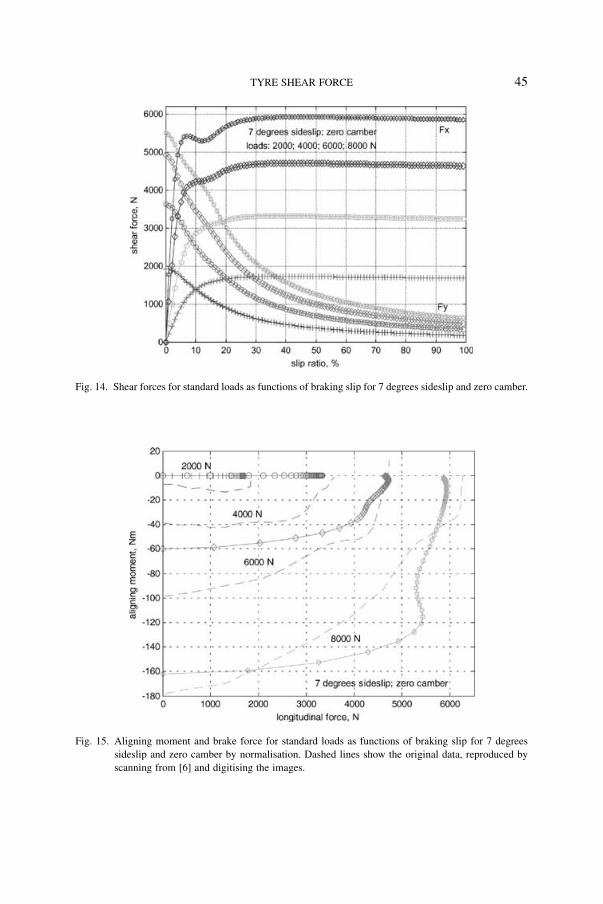
Fig. 14. Shear forces for standard loads as functions of braking slip for 7 degrees sideslip and zero camber.
Fig. 15. Aligning moment and brake force for standard loads as functions of braking slip for 7 degrees
sideslip and zero camber by normalisation. Dashed lines show the original data, reproduced by
scanning from [6] and digitising the images.
TYRE SHEAR FORCE 45

physical behaviour of the tyre. It would be more satisfying to transform the real
problem to the normalised world, to combine the slips appropriately, to work out the
forces there and then to transform back again to get the actual forces. The method
used so far has not been so pure.
In order to accentuate the high slip behaviour, sacrificing that for low slips, slip
normalisations based on the slip values for maximum forces, �p and �p [6] could be
used. In the above, these data are not used. Linear transformations based on �p and �p
would imply a poor representation of the low and medium slip behaviour which is
often the centre of interest in vehicle simulation.
4. AN IMPROVED NORMALISATION SCHEME
4.1. Modification of the Normalisation Method
The discussion above indicates that non-linear transformations, such that Radt’s
relationships between slip and normalised slip are preserved for low slip, while the
high slip behaviour is catered for by the non-linearity in the transformations, will
enable better results to be obtained. What is required is that, when � reaches �p and �reaches �p, the normalised slip in each case reaches that value, depending on �CC and �EE,
for which the normalised force is a maximum. With our nominal tyre, for which we
are using �CC ¼ 1:47 and �EE ¼ 0:462, this normalised slip value is 2.325. Then, the
real slip that gives the maximum force will correspond with the normalised slip that
gives the maximum normalised force.
For the nominal tyre at the nominal load, �p, the slip ratio for peak braking force, is
0.091 and this transforms to 3.191 when normalised (by multiplication by Cf�=Fx max).
Similarly, �p of 0.178 becomes 2.124 when normalised (by multiplication by
Cf�=Fy max) according to Radt’s linear method. To make the normalised slips come to���p ¼ 2:325 when �¼�p and �¼�p, the following slip transformation functions are
introduced:
��� ¼ Cf� � � � f�ð�Þ=Fx max; with f�ð�Þ¼ expðc�:�Þ for � < �p or ��� ¼ m� � �þ int� for �5�p ð16Þ
��� ¼ Cf� � tan� � f�ð�Þ=Fy max; with f�ð�Þ¼ expðc�:�Þ for � < �p or ��� ¼ m� � �þ int� for �5�p ð17Þ
with c� given by lnð���p � Fxmax=ð�p � CF�ÞÞ=�p and c� given by lnð���p � Fymax=ð�p � CF�ÞÞ=�p.
46 R.S. SHARP AND M. BETTELLA
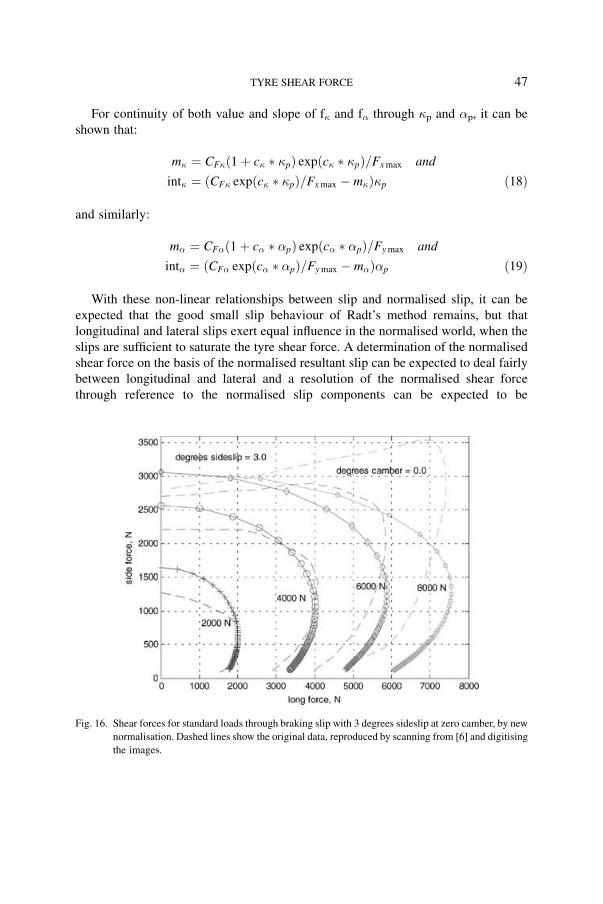
For continuity of both value and slope of f� and f� through �p and �p, it can be
shown that:
m� ¼ CF�ð1 þ c� � �pÞ expðc� � �pÞ=Fx max and
int� ¼ ðCF� expðc� � �pÞ=Fx max m�Þ�p ð18Þ
and similarly:
m� ¼ CF�ð1 þ c� � �pÞ expðc� � �pÞ=Fy max and
int� ¼ ðCF� expðc� � �pÞ=Fy max m�Þ�p ð19Þ
With these non-linear relationships between slip and normalised slip, it can be
expected that the good small slip behaviour of Radt’s method remains, but that
longitudinal and lateral slips exert equal influence in the normalised world, when the
slips are sufficient to saturate the tyre shear force. A determination of the normalised
shear force on the basis of the normalised resultant slip can be expected to deal fairly
between longitudinal and lateral and a resolution of the normalised shear force
through reference to the normalised slip components can be expected to be
Fig. 16. Shear forces for standard loads through braking slip with 3 degrees sideslip at zero camber, by new
normalisation. Dashed lines show the original data, reproduced by scanning from [6] and digitising
the images.
TYRE SHEAR FORCE 47
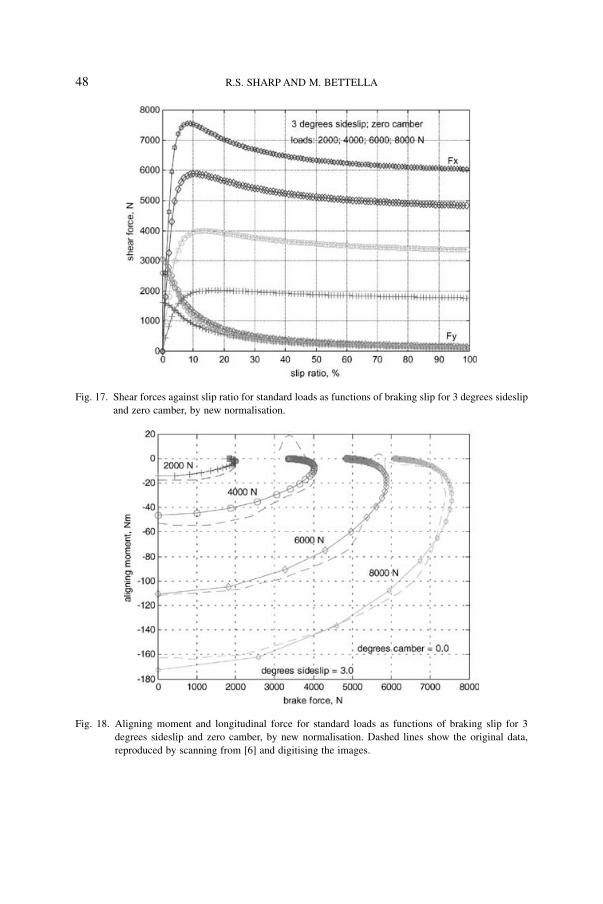
Fig. 17. Shear forces against slip ratio for standard loads as functions of braking slip for 3 degrees sideslip
and zero camber, by new normalisation.
Fig. 18. Aligning moment and longitudinal force for standard loads as functions of braking slip for 3
degrees sideslip and zero camber, by new normalisation. Dashed lines show the original data,
reproduced by scanning from [6] and digitising the images.
48 R.S. SHARP AND M. BETTELLA

reasonable. The somewhat arbitrary function, �, is no longer needed. Consequently,
the normalised force is obtained as:
�FFs ¼ �FFsð���Þ with �FFx ¼ ��� � �FFs=��� and �FFy ¼ ��� � �FFs=���: ð20Þ
Then, de-normalising the force components by reversing the original, simple
normalisation yields:
Fx ¼ Fx max � �FFx and Fy ¼ Fy max � �FFy ð21Þ
4.2. Results from the New Scheme
Repeating the trials that gave rise to the results of Figures 10–15 with the new
algorithm, Figures 16–21 are obtained.
The non-linear longitudinal slip transformation used in the calculations is shown in
Figure 22. The slope at the origin, in each case, is given by the ratio: slip stiffness to
peak force. Then the exponent in the transformation relationship changes that slope
until the slip � reaches �p. For larger slips, the relationship is linear. A corresponding
set of curves belongs to the lateral slip transformations (Fig. 23).
Fig. 19. Shear forces for standard loads through a complete range of braking slips with 7 degrees sideslip at
zero camber, by new normalisation. Dashed lines show the original data, reproduced by scanning
from [6] and digitising the images.
TYRE SHEAR FORCE 49

Fig. 20. Shear forces against slip ratio for standard loads as functions of braking slip for 7 degrees sideslip
and zero camber, by new normalisation.
Fig. 21. Aligning moment and longitudinal force for standard loads as functions of braking slip for 7
degrees sideslip and zero camber, by new normalisation. Dashed lines show the original data,
reproduced by scanning from [6] and digitising the images.
50 R.S. SHARP AND M. BETTELLA
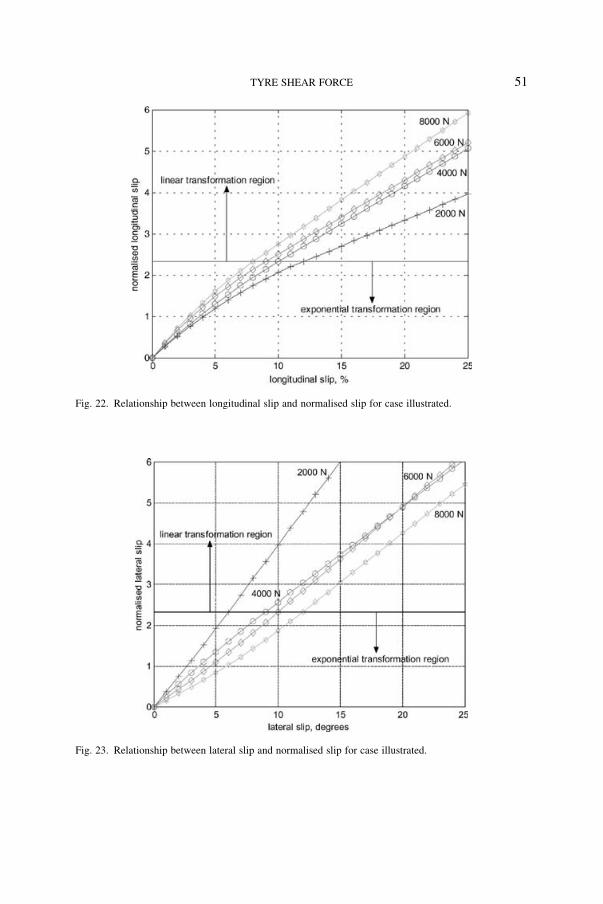
Fig. 22. Relationship between longitudinal slip and normalised slip for case illustrated.
Fig. 23. Relationship between lateral slip and normalised slip for case illustrated.
TYRE SHEAR FORCE 51

5. GENERAL APPLICATION
To see the general application of the process, let us suppose the following scenario: The
nominal load of a tyre is selected, slightly biased towards the high end of its load range,
since it is more important to compute accurately the large forces, when the tyre loading
is relatively high. At the nominal load, a sideslip sweep is conducted and the sideforce
and the aligning moment are measured. Similarly, a longitudinal slip sweep at straight
running is conducted. Any offsets due to rolling resistance and tyre imperfections are
removed from the results. B, C, D and E Magic Formula primary parameters are found
for each of longitudinal force, lateral force and aligning moment. In general, C and E
values for the two forces will be different and, since it is necessary to select one value
of C and one of E only, in order to deal with combined slip effectively, it may be
preferable to select C and E ahead of testing, based on prior knowledge, and to restrict
the testing to small and moderate slip levels. Three other loads are selected and peak
force and moment values and stiffnesses (force and moment derivatives for small slips)
are determined. The slip values for which the forces peak are noted in each case. For
each of the four loads, the camber angle is set to 5 degrees say and the camber thrust is
measured for no sideslip. Also, the peak force is found by performing a local sideslip
sweep near to the peak force value. These measurements with camber give the camber
stiffnesses for each of the four loads and the influence of the camber angle on the peak
lateral force. The measurement database is now complete.
Values for C and E for the forces are fixed first, possibly by compromise between
longitudinal and lateral results or by presumption as mentioned above. C and E values
for the aligning moment at the nominal load are adopted as standard. Then, to enable
the calculation of the other required parameters for any load, secondary parameters
which best describe the primary parameters in terms of load are derived, using the
equations of Section 2. For the data in Table 1 and the camber stiffnesses given, the
following results are obtained:
CF� ¼ fFzð0:00377 � Fz þ 23:731Þg= expð4:744e 5 � FzÞ; ð22Þ
CF� ¼ 63306 � sinð2 � atanðFz=5094ÞÞ; ð23Þ
CM� ¼ fFzð2:135e 4 � Fz 0:0051Þg= expð1:76e 4 � FzÞ; ð24Þ
CF� ¼ 4:861e 5 � Fz2 þ 0:2537 � Fz; ð25Þ
D for Fx ¼ 2:347e 5 � Fz2 þ 1:153 � Fz; ð26Þ
D for Fy ¼ 2:035e 5 � Fz2 þ 0:9966 � Fz; ð27Þ
D for Mz ¼ 2:804e 6 � Fz2 þ 0:001551 � Fz; ð28Þ
52 R.S. SHARP AND M. BETTELLA
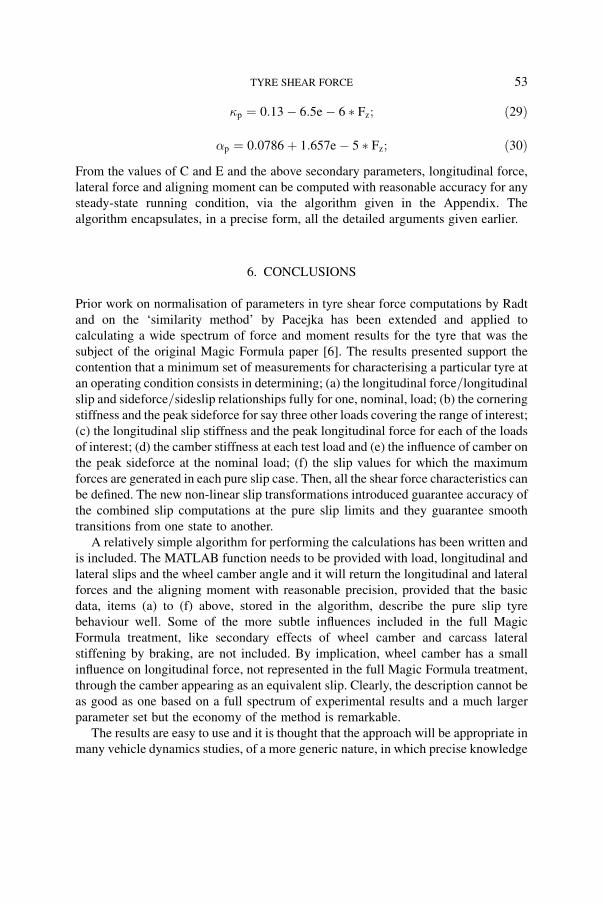
�p ¼ 0:13 6:5e 6 � Fz; ð29Þ
�p ¼ 0:0786 þ 1:657e 5 � Fz; ð30Þ
From the values of C and E and the above secondary parameters, longitudinal force,
lateral force and aligning moment can be computed with reasonable accuracy for any
steady-state running condition, via the algorithm given in the Appendix. The
algorithm encapsulates, in a precise form, all the detailed arguments given earlier.
6. CONCLUSIONS
Prior work on normalisation of parameters in tyre shear force computations by Radt
and on the ‘similarity method’ by Pacejka has been extended and applied to
calculating a wide spectrum of force and moment results for the tyre that was the
subject of the original Magic Formula paper [6]. The results presented support the
contention that a minimum set of measurements for characterising a particular tyre at
an operating condition consists in determining; (a) the longitudinal force=longitudinal
slip and sideforce=sideslip relationships fully for one, nominal, load; (b) the cornering
stiffness and the peak sideforce for say three other loads covering the range of interest;
(c) the longitudinal slip stiffness and the peak longitudinal force for each of the loads
of interest; (d) the camber stiffness at each test load and (e) the influence of camber on
the peak sideforce at the nominal load; (f) the slip values for which the maximum
forces are generated in each pure slip case. Then, all the shear force characteristics can
be defined. The new non-linear slip transformations introduced guarantee accuracy of
the combined slip computations at the pure slip limits and they guarantee smooth
transitions from one state to another.
A relatively simple algorithm for performing the calculations has been written and
is included. The MATLAB function needs to be provided with load, longitudinal and
lateral slips and the wheel camber angle and it will return the longitudinal and lateral
forces and the aligning moment with reasonable precision, provided that the basic
data, items (a) to (f) above, stored in the algorithm, describe the pure slip tyre
behaviour well. Some of the more subtle influences included in the full Magic
Formula treatment, like secondary effects of wheel camber and carcass lateral
stiffening by braking, are not included. By implication, wheel camber has a small
influence on longitudinal force, not represented in the full Magic Formula treatment,
through the camber appearing as an equivalent slip. Clearly, the description cannot be
as good as one based on a full spectrum of experimental results and a much larger
parameter set but the economy of the method is remarkable.
The results are easy to use and it is thought that the approach will be appropriate in
many vehicle dynamics studies, of a more generic nature, in which precise knowledge
TYRE SHEAR FORCE 53

of tyre properties is unavailable and in which the results sought will be relatively
insensitive to variations in tyre force details.
A new notation has been contributed, with the intention to make the procedures
more easily understood. The algorithm can be seen to be short. Its computing time
will be short in comparison with many alternatives, although formal trials of this
aspect have not been made.
REFERENCES
1. Clark, S.K.: Mechanics of Pneumatic Tires. NBS Monograph 122, 2nd ed., 1981.
2. Wong, J.Y.: Theory of Ground Vehicles. Wiley, New York, 2nd ed., 1993.
3. Dixon, J.C.: Tires, Suspension and Handling, SAE Inc., Warrendale, PA, 2nd ed., 1996.
4. Milliken, W.F. and Milliken, D.L.: Race Car Vehicle Dynamics. SAE Inc., Warrendale, PA, 1995.
5. Genta, G.: Motor Vehicle Dynamics: Modeling and Simulation. World Scientific Publishing,
Singapore, 1997.
6. Bakker, E., Nyborg, L. and Pacejka, H.B.: Tyre Modelling for Use in Vehicle Dynamics Studies. SAE
Paper 870421, 1987.
7. Bakker, E., Pacejka, H.B. and Lidner, L.: A New Tyre Model with Application in Vehicle Dynamics
Studies. Proc. 4th Int. Conf. Automotive Technologies, Monte Carlo, 1989, SAE paper 890087, 1989.
8. Pacejka, H.B. and Bakker, E.: The Magic Formula Tyre Model. Proc. 1st International Tyre
Colloquium, Delft, 1991. Vehicle System Dynamics 21 (Suppl.) (1991), pp. 1–18.
9. Van Oosten, J.J.M. and Bakker, E.: Determination of Magic Formula Parameters. Proc. 1st
International Tyre Colloquium, Delft, 1991. Vehicle System Dynamics 21 (Suppl.) (1991), pp. 19–29.
10. Pacejka, H.B. and Sharp, R.S.: Shear Force Generation by Pneumatic Tyres in Steady State Conditions:
a Review of Modelling Aspects. Vehicle System Dynamics 20 (1991), pp. 121–176.
11. Schuring, D.J., Pelz, W. and Pottinger, M.G.: The BNPS Model – an Automated Implementation of the
‘‘Magic Formula’’ Concept. Proc. IPC-7 Conf., Phoenix, AZ, 1993.
12. Bayle, P., Forissier, J.F. and Lafon, S.: A New Tyre Model for Vehicle Dynamic Simulations.
Automotive Technologies International, (1993), pp. 193–198.
13. Pacejka, H.B. and Besselink, I.J.M.: Magic Formula Tyre Model with Transient Properties. Proc. 2nd
International Tyre Colloquium, Berlin, 1997. Vehicle System Dynamics 27 (Suppl.) (1997),
pp. 234–249.
14. Bernard, J.E., Segel, L. and Wild, R.E.: Tire Shear Force Generation During Combined Steering and
Braking Maneuvers. SAE Paper 770852, 1977.
15. Allen, R.W. and Szostak, H.T.: Steady State and Transient Analysis of Ground Vehicle Handling, SAE
Paper 870495, 1987.
16. Radt, H.S. and Milliken, W.F.: Non-Dimensionalising Tyre Data for Vehicle Simulation. Road Vehicle
Handling. MEP, London, 1983, pp. 229–240.
17. Radt, H.S. and Glemming, D.A.: Normalization of Tire Force and Moment Data. Tire Science and
Technology, TSTCA 21(2) (1993), pp. 91–119.
18. Lugner, P. and Mittermayr, P.: A Measurement Based Tyre Characteristics Approximation. Proc.
1st International Tyre Colloquium, Delft, 1991. Vehicle System Dynamics 21 (Suppl.) (1991),
pp. 127–144.
19. Vehicle Dynamics Terminology. SAE Paper J670e. Society of Automotive Engineers, Warrendale,
PA, 1976.
20. Nakayama, Y. and Boucher, R.F.: Introduction to Fluid Mechanics. Arnold, London, 1999.
54 R.S. SHARP AND M. BETTELLA

APPENDIX
MATLAB Function for Calculation of Forces and Moment
function [Fx, Fy, Mz]¼ norm_alg(load,kappa,alpha,gamma);
% Tyre shear force=moment calculations via Magic Formula and similarity method
% the following parameters are particular to the case treated in the paper
C ¼ 1:47; B ¼ 1=C; E ¼ 0:462; slipm ¼ 2:325;
Cm ¼ 2:46; Em ¼ 2:04; g1 ¼ 0:848;
% see section 5 for the origins of the coefficients b1. . .b16
b1¼ 3.769e 3; b2¼ 23.73; b3¼ 4.744e 5; C_fkappa¼ load � (b1 � loadþ b2)/
exp(b3 � load);
b4¼ 63310; b5¼ 5094; C_falpha¼ b4 � sin(2 � atan(load=b5));
b6¼ 2.135e 4; b7¼5.1e 3; b8¼ 1.76e 4; C_malpha¼ load� (b6� loadþ b7)/
exp(b8� load);
b9¼ 4.861e 5; b10¼ 0.2537; C_fgamma¼ load � (b9 � loadþ b10);
b11¼2.347e 5; b12¼ 1.153; D_fx¼ load � (b11 � loadþ b12);
b13¼2.035e 5; b14¼ 0.9966; D_fy¼ load � (b13 � loadþ b14);
b15¼ 2.804e 6; b16¼ 1.551e 3; D_mz¼ load � (b15 � loadþ b16);
k_p¼ 0.13 6.5e 6 � load; a_p¼ 0.0786þ 1.657e 5 � load;
% the algorithm follows
a_feq¼ alphaþ gamma � (C_fgammaþ g1 � load)=C_falpha;
if alpha¼ ¼ 0
alpha¼ eps;
end
Da_eq¼D_fyþ load � g1 � abs(gamma) � sign(alpha � gamma);
c_k¼ log(slip_m �D_fx=(k_p �C_fkappa))=k_p;
c_a¼ log(slip_m �Da_eq=(a_p �C_falpha))=a_p;
m_k¼C_fkappa � exp(c_k � k_p) � (1þ c_k � k_p)=D_fx;
m_a¼C_falpha � exp(c_a � a_p) � (1þ c_a � a_p)=Da_eq;
int_k¼ (C_fkappa � exp(c_k � k_p)=D_fx-m_k) � k_p;
int_a¼ (C_falpha � exp(c_a � a_p)=Da_eq-m_a) � a_p;
if a_feq < a_p
a_feq_bar¼C_falpha � a_feq � exp(c_a � a_feq)=Da_eq;
else
a_feq_bar¼m_a � a_feqþ int_a;
end
TYRE SHEAR FORCE 55
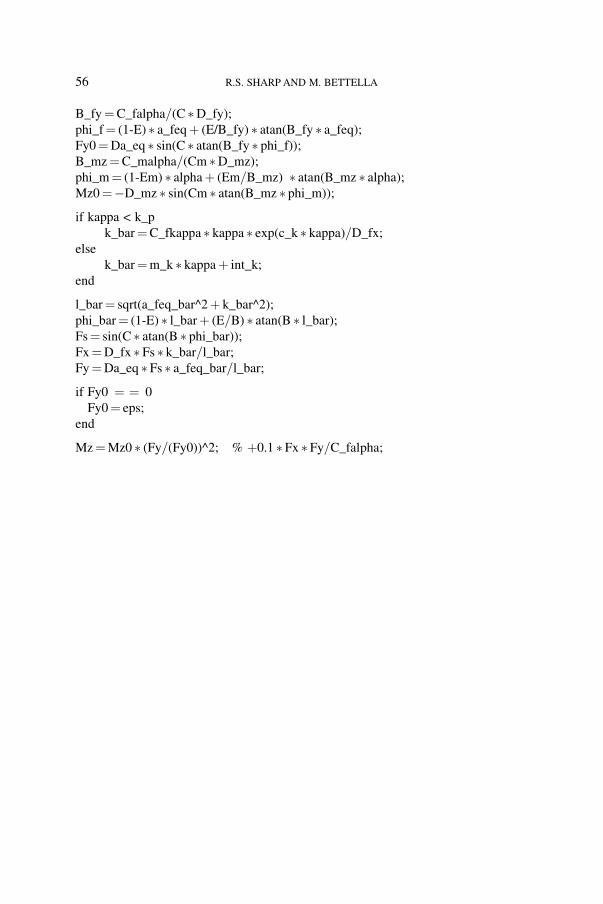
B_fy¼C_falpha=(C �D_fy);
phi_f¼ (1-E) � a_feqþ (E/B_fy) � atan(B_fy � a_feq);
Fy0¼Da_eq � sin(C � atan(B_fy � phi_f));
B_mz¼C_malpha=(Cm �D_mz);
phi_m¼ (1-Em) � alphaþ (Em=B_mz) � atan(B_mz � alpha);
Mz0¼D_mz � sin(Cm � atan(B_mz � phi_m));
if kappa < k_p
k_bar¼C_fkappa � kappa � exp(c_k � kappa)=D_fx;
else
k_bar¼m_k � kappaþ int_k;
end
l_bar¼ sqrt(a_feq_bar^2þ k_bar^2);
phi_bar¼ (1-E) � l_barþ (E=B) � atan(B � l_bar);
Fs¼ sin(C � atan(B � phi_bar));
Fx¼D_fx � Fs � k_bar=l_bar;
Fy¼Da_eq � Fs � a_feq_bar=l_bar;
if Fy0 ¼ ¼ 0
Fy0¼ eps;
end
Mz¼Mz0 � (Fy=(Fy0))^2; % þ0.1 � Fx � Fy=C_falpha;
56 R.S. SHARP AND M. BETTELLA