the umi rtx robot: simulated human...
TRANSCRIPT
The UMI RTX Robot: Simulated Human Anatomy By; Jaime Zabala and Frank Bejerano
CEN 3213 Embedded Systems Programming Prof. Janusz Zalewski
Florida Gulf Coast University April 21, 2008

Zabala, Bejerano - 2
Table of Contents
1. Introduction .......................................................................................................................3-8
1.1 What is a Robot? ............................................................................................................... 3
1.2 UMI RTX ............................................................................................................................ 4
1.3 Java Original Code ............................................................................................................ 6
2. Problem Specification ..................................................................................................... 8-10
2.1 Web Control Questions ..................................................................................................... 8
2.2 Java Benefits ................................................................................................................... 8
2.3 Procedure to Control Remote Instrument ......................................................................... 9
3. Solution Overview ......................................................................................................... 10-14
3.1 Web Availability .............................................................................................................. 11
3.2 Video Output ................................................................................................................... 11
4. Implementation and Testing ......................................................................................... 14-27
4.1 Is a Remote Session Possible ....................................................................................... 14
4.1.1 Server .................................................................................................................... 14
4.2 How Would a User Control the Robot? ........................................................................... 15
4.2.1 Code Modifications ............................................................................................... 16
4.2.2 Applet in the HTML ............................................................................................... 20
4.2.3 User Procedure ..................................................................................................... 20 4.3 Where Would Our Code Run? ......................................................................................... 22 4.4 How will the user know the robot is working? .................................................................. 24 4.5 Why would a user want to control the robot? ................................................................... 26 5. Conclusion & Future Work ............................................................................................ 27-28
5.1 Why doesn’t the applet work? ......................................................................................... 27
5.2 A Different Approach ...................................................................................................... 27
5.2 Password Protection ...................................................................................................... 28
6. References........................................................................................................................... 29

Zabala, Bejerano - 3
1. Introduction
1.1 What is a Robot?
A robot is a machine that resembles a human and does mechanical, routine
tasks on command. All robots must be put together in one way or another by a human
first. Programmers give the robot life with coding, telling it what to do. Designers map
out the robots purpose and structure, while assemblers put together the skeleton of the
robot. In our case, we will be dealing with the programming, to maximize the efficiency
of the robotic arm’s design and structure.
Robotic arms are generally used to perform repetitive tasks both efficiently and
quickly. Industrial robots prove more efficient than human workers for certain task
because a robot makes very few mistakes, doesn’t need breaks, and doesn’t tire.
Robotic arms also offer the ability to reach places that are difficult or dangerous for
human access, such a space station or a hostile war zone.
Figure 1.1: CanadArm at ISS in use Figure1.2: SWORDS robot at attention
Zabala, Bejerano - 4
The SWORDS robot shown in figure 1.2 is currently being used in Iraq to deactivate
bombs and serve as a “first man” through doors (BBC News, 2006). Similarly, the MDA
CanadArm2 seen in figure 1.1 is helping astronauts in the International Space Station
do repairs more safely (MDA Essential Information Solutions, 2006). Robotics is a
developing technology that is constantly changing to match our needs.
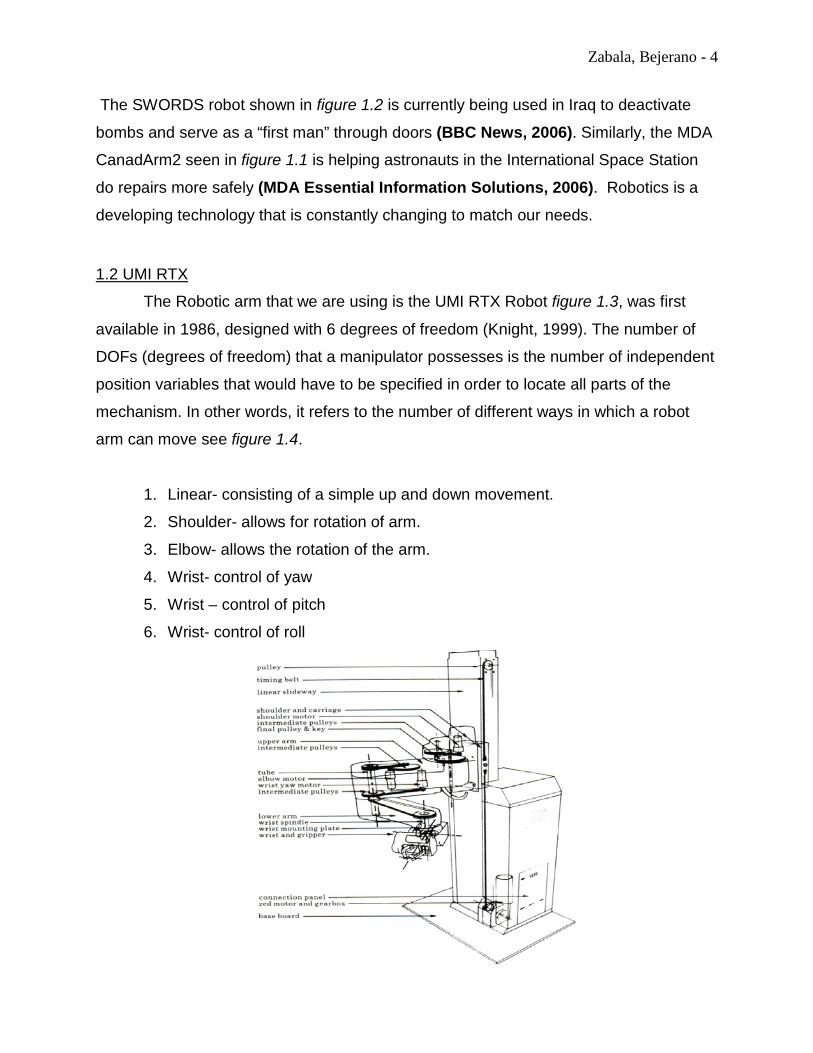
1.2 UMI RTX
The Robotic arm that we are using is the UMI RTX Robot figure 1.3, was first
available in 1986, designed with 6 degrees of freedom (Knight, 1999). The number of
DOFs (degrees of freedom) that a manipulator possesses is the number of independent
position variables that would have to be specified in order to locate all parts of the
mechanism. In other words, it refers to the number of different ways in which a robot
arm can move see figure 1.4.
1. Linear- consisting of a simple up and down movement.
2. Shoulder- allows for rotation of arm.
3. Elbow- allows the rotation of the arm.
4. Wrist- control of yaw
5. Wrist – control of pitch
6. Wrist- control of roll
Zabala, Bejerano - 5
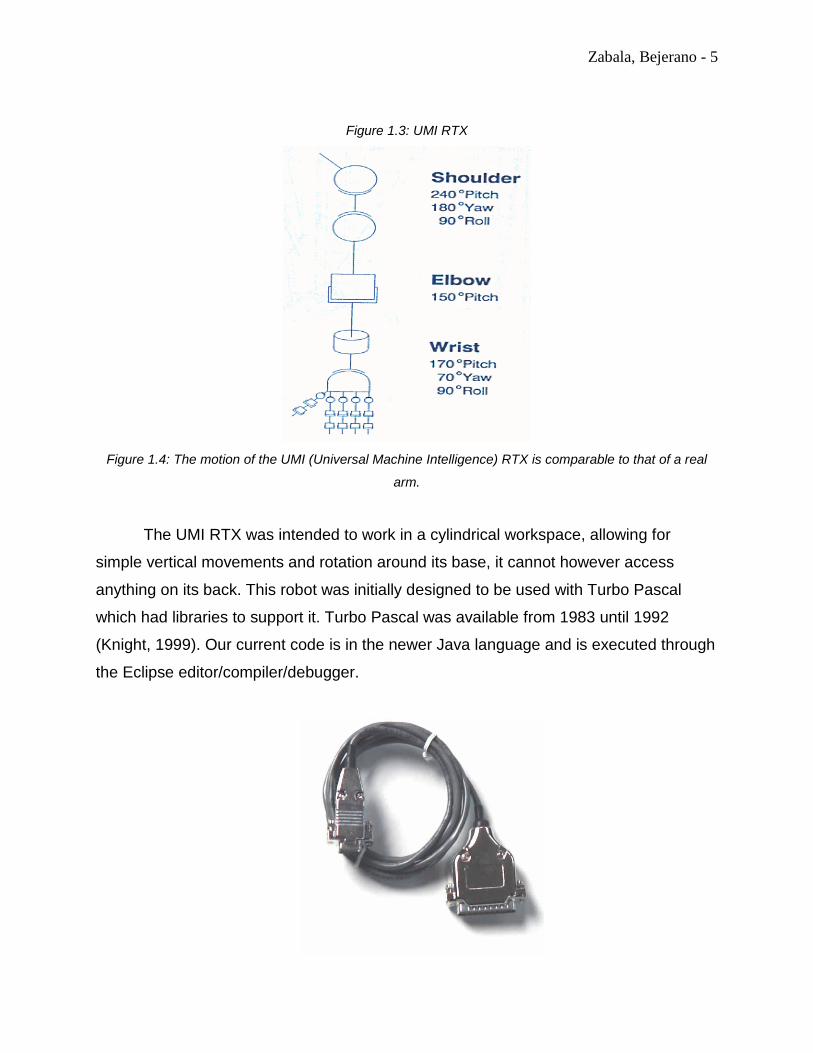
Figure 1.3: UMI RTX
Figure 1.4: The motion of the UMI (Universal Machine Intelligence) RTX is comparable to that of a real
arm.
The UMI RTX was intended to work in a cylindrical workspace, allowing for
simple vertical movements and rotation around its base, it cannot however access
anything on its back. This robot was initially designed to be used with Turbo Pascal
which had libraries to support it. Turbo Pascal was available from 1983 until 1992
(Knight, 1999). Our current code is in the newer Java language and is executed through
the Eclipse editor/compiler/debugger.
Zabala, Bejerano - 6
Figure 1.5: Serial to RS-232 cable
The computer is connected to the robotic arm through a serial link from the
computer’s Serial port to a RS-232 socket at the connection panel of the robot. Through
this cable seen in figure 1.5 the computer sends binary commands generated by the
java code directly to control the arm.
1.3 Java Original Code
Thanks to the work of prior students Neven Skoro and Jonathan Eren (Skoro &
Eren, 2006), we have the opportunity to work with a Java program that allows for
improved control of the robot. The 6 degrees of freedom can be independently operated
by the robot’s four 65Hz motors, located in the base, elbow, and shoulder. The GUI as
developed by Mr. Skoro and Eren, allows for this independent control, much like only
moving one part of one’s arm. While it can be done, many times a combination of
movements of all parts is necessary to achieve the desired motion.
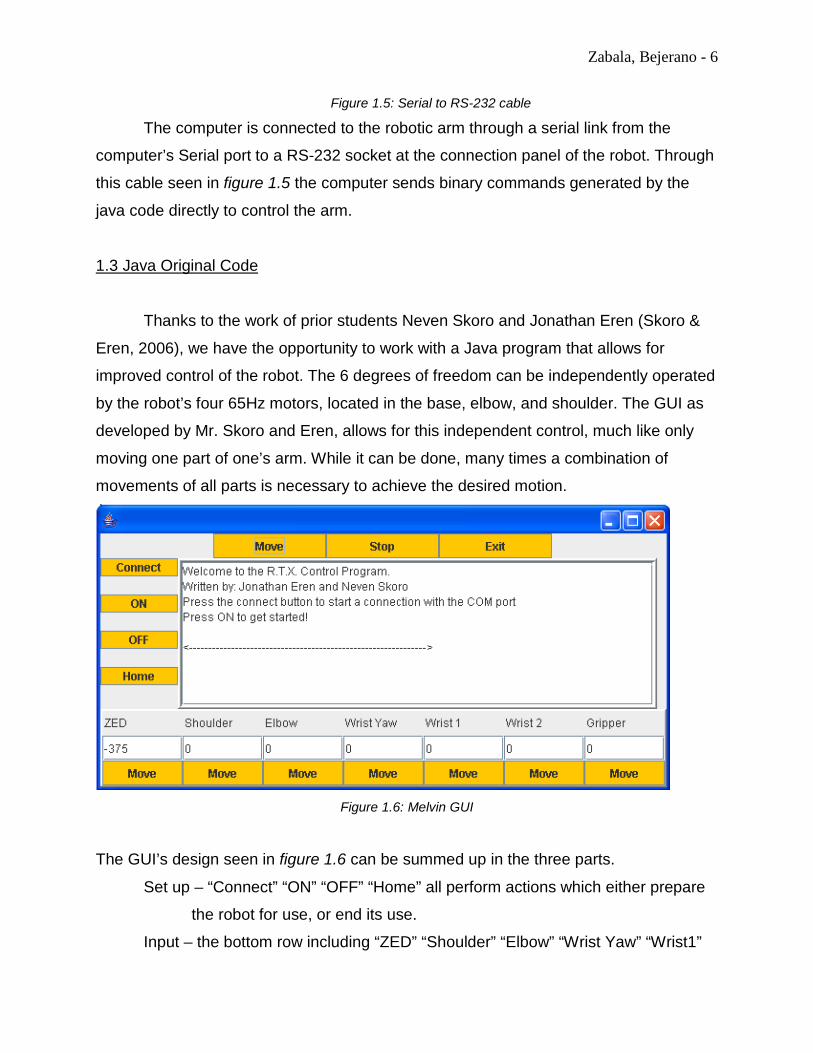
Figure 1.6: Melvin GUI
The GUI’s design seen in figure 1.6 can be summed up in the three parts.
Set up – “Connect” “ON” “OFF” “Home” all perform actions which either prepare
the robot for use, or end its use.
Input – the bottom row including “ZED” “Shoulder” “Elbow” “Wrist Yaw” “Wrist1”

Zabala, Bejerano - 7
“Wrist2” “Gripper” must be inputted prior to any desired movement other
than home. ZED here refers to the vertical movement of the unit, achieved
by a band and motor at the base of the robot.
Action – “Move” “Stop” “Exit” are all actions that may be taken by the program or
robot. Move executes all inputs simultaneously and stop stops all
movement.
Figure 1.7: RTX context diagram
The Java RTX program is controlled by the main class which initializes all the motors
and communicates with the user via the Melvin_GUI class. Each motor is controlled by
a separate class. When the user enters the information to the GUI, the GUI calls the
methods in the main class which operates on separate motor objects created.
Additionally, there is also a connect class called “ConCom” which seeks out and makes
a connection to the robot through the com port. Note – without first running the Connect
GUI Class
Shoulder Class
Elbow Class
WristH Class
WristT Class
WristV Class
Gripper Class
Column Class
Main Class
User
Connect Class
Zabala, Bejerano - 8
Class and making a proper connection, any movement or further communication to the
robot is not available.
2. Problem Specification
2.1 Web Control
While working with the RTX, we will attempt to make it available for operation
over the web. This remote operation will allow a user with internet connectivity to control
the robot from anywhere in the world. A remote machine like the RTX would prove
useful for doctors, soldiers, engineers, and astronauts.
There are a number of questions we must answer in order to achieve remote
connectivity. 1. Is a remote connection possible?
2. How would the user control the robot?
3. Where would our code run from?
4. How will the user know the robot is working?
5. Why would a user want to control the robot?
Since neither of us have ever designed a web based remote program, heavy
research is required on the aforementioned questions. While we do have several server
options available (such as Satnet) capabilities must be determined in accordance to the
robot’s requirements for operation. As of February 27, 2008, we did not still have a fully
functioning machine code. Further development and adaptation for our new needs was
necessary. Also, a suitable location from which to remotely access the server had to be
chosen. High internet integrity and reliability are important in order to minimize the
communication time between the server and user.
2.2 Java Benefits
We are fortunate to be working with a Java program which allows for:
– Platform independence, which allows for understanding of multiple coding
methods.

Zabala, Bejerano - 9
– Only needs to compile once and may run any number of times thereafter;
handy because the program will run many times with little need for coding
changes.
– Java applet can run on user side via the internet. User has direct access
of a GUI.
– More flexibility, interactivity and immediacy. Connects to servers and com
ports with greater ease than older programs. Also, already has libraries
developed specifically for robot controllers.
– Continuous connection between user and server
– More friendly and easy-to-use user interface(GUI) (FAQ Applet Security,
1995)
2.3 Procedure to Control a Remote Instrument
– We must use an internet browser to connect to the web site where the
instrument is located. This website must be developed.
– We need to create or adapt the current Java applet to allow a web
browser to run it.
– The Java applet must establish a TCP (Transmission Control Protocol)
connection with the server program running on web server. This
connection must be figured out and we must check if there are any
servers that we can use for this purpose.
– The java applet will need to send the desired parameters to the server
based program.
– The server program would need to figure out if the parameters given are
appropriate.
Zabala, Bejerano - 10
– The server program then will need to generate commands and transfer the
commands to the Lab PC to which the instrument is connected and
controlled.
– The Lab PC will need to execute the commands and acquire output of the
instrument.
– The acquired data will be transferred from the Lab PC through the server
and back to the User PC.
– Verification of the UMI RTX’s movements and accuracy will be done
visually through a webcam.
– To get a new result, the user just needs to change the value of parameters
in the GUI and click the move button.
We will need to find a way to broadcast the movement of the Robotic Arm in real time.
This will also depend greatly on the internet connectivity of the lab pc, server pc, and
user pc. A proper connection will allow for real time control without lag or high latency.
A web enabled camera will be integrated into this part of the operation, possibly one
from a lap top.
3. Solution Overview
In order to achieve control of the UMI RTX robotic arm via remote web access,
we will attempt to use the java GUI provided by Neven Skoro and Jonathan Eren.
However, it seems that we may have to create our own separate applet to make our
web page call a remote session with the lab computer using Remote Assistance. The
current firewall in FGCU may prevent this remote session from occurring, as we have
already experienced problems allowing live streaming video through ports not
authorized by the FGCU computer center. This problem is furthered because of the
restrictions creating private IP addresses for the computers accessing the internet
through wlan-public wireless connection. Since we may not remove the robot from the
RH256 computer lab due to size restrictions, we must find a way around these firewall
issues. If we could control FGCU’s firewall and if the connection is initiated we will have

Zabala, Bejerano - 11
full control over the Lab computer (computer to which the UMI RTX robotic arm is
connected to). We will run the Java applets from yet to be determined server, to which
the lab pc has access to.
3.1 Web availability
Through our research, we have discovered that in order to access the controls
for the UMI RTX robotic arm through the internet, we need to have a place where our
java applet can be accessed universally. The best solution for this is to place it on a
website that in turn would access a server, then to our lab PC. The website would have
to be java compatible and allow java applets to run, as well as some form of video
feedback. Additionally, we will need a server which also supports java files. The
website will allow the user to access the applet, after a prompt for a username and
password. It must access the server and lab PC with as little response time as possible
to ensure proper movements of the robot. The robot needs a total of 16ms to receive
and return the proper data on movement, so anything more than 8 ms may cause an
error in the motion of the robot (Skoro & Eren, 2006).
For our need, we have looked into JSP. A Java Server Page (JSP) is a servlet
from Java that executes in a Web container (contract specifies a runtime environment
for web components that includes security, concurrency, life-cycle management,
transaction, deployment, and other services). Our server must also have access to the
lab PC, whether it is located at FGCU or elsewhere.
The lab PC may be any computer with an external serial port to which the RS-
232 robot port can be connected. The lab PC does not actually have to contain the
code for the robot movement. Since the code itself will be running on the server and the
graphic user interface will be on the website, all the lab PC has to do is provide a
connection between the robot and the server.
3.2 Video Output
The problem as to how to figure out a successful trial can be solved by one of
two ways. Either a person visually sees the robot and knows what the correct
movements are, or a live video showing the real-time movements of the robot are

Zabala, Bejerano - 12
streamed as part of the user’s interface. For the sake of over achievement, we will
employ the second option and provide the user with a more complete experience and
instant feedback.
We are currently working with Yahoo Live!, a service that facilitates live video
and audio streaming (Y! LIVE, 2008). Along with the free software provided after
registration by Yahoo Live!, we will require the use of a webcam, a sound card, and
broadband internet connection. Y! live works by running an encoder which gives the
user the option of streaming a live or previously recorded video. When you run the
Encoder and press the 'Live' or 'Archived' button, it appears as if you are broadcasting.
The computer begins listening for incoming connections in order to send the stream out.
This is the same principle as you requesting a page from www.fgcu.com. Yahoo Live!
Works like a server, listening and waiting to send out pages on demand. Our Encoder is
doing exactly that: waiting for the server to come along and pull the stream.
Figure 3.1: Y! live Broadcasting
Zabala, Bejerano - 13
Another option in case the firewall issues cannot be resolved in time, would be
the use of instant messenger software such as AIM to take advantage of its “peer to
peer” video conferencing (Aim Instant Messenger). In actuality, AIM runs through a third
party before reaching the receiving computer so would not be as direct as “peer to peer”
sounds. Both users must download the required software and create accounts within
AIM. Knowledge of the account names is necessary as well as webcams for each
computer, and comparable internet connections. A request for video streaming must be
made by either user and accepted by the other before any connection may begin which
again would require a person to oversee the lab PC during execution.
However Yahoo Live! offers a more attractive solution because the user would
not need to sign up with the provider or have to download any additional software to
view the live stream, it would simply be embedded in our webpage. Yahoo Live! also
allows for multiple clients to view the stream simultaneously and AIM does not. Yahoo
Live! operate on its own three servers with little traffic, which allows the streaming
bandwidth to always stay above 500kbps, more than enough for our purpose. More
importantly, Yahoo Live! is a free service and thanks to our humble student budgets, it
is all we can afford.
A solution that we may try to experiment with is connecting to the internet using
a dial-up connection; this should surpass the Florida Gulf Coast’s established firewall
and allow our video feed as well as the server-lab PC connection to be broadcasted. A
dial-up internet connection however may not provide a very responsive video feedback.
While the communications between user/server/lab PC must be fast, the streaming
video will likely have an estimated 2 second delay should we use Yahoo Live!. Worse
yet, with a dial-up connection this lag may increase to nearly 1 minute. If we are unable
to place the video stream on the user website, Yahoo Live! also provides an HTML code
for the stream so the video could easily be integrated into a separate window, though
still in sync with the applet.
4. Answers to Questions (Conclusion)
Zabala, Bejerano - 14
4.1 Is a Remote Session Possible?
We have discovered that yes; remote sessions are possible, given some specific
circumstances. First and foremost is the issue of the router and FGCU firewalls.
Router/Firewalls – The lab PC that we have been dealing with is behind a router, or
point of access for the internet. All computers in FGCU must go through this router in
order to reach the internet and are thusly connected in a network. The issue here is that
have an “internal IP address” and cannot access it from anywhere outside the network
without first following several procedures. We must discover the routers IP address,
also called the exterior IP of the network. Additionally we must apply to have a port
open to the pc which we need to access. The connection via a browser would look like
http:// <external IP address> : <port number>.
However, due to the unwillingness of the FGCU network administrators to facilitate our
progress, we have been forced to request a computer with an independent IP address.
This means that we would no longer have to go through any FGCU router or firewall in
order to access the web.
4.1.1 Server–
After testing out several options that FGCU had to offer in regards to servers, we
discovered that none either met our needs or allowed us access. Satnet runs on linux
which is not compatible with the Java API since win32dll is used. And after repeated
requests to use ROCK server, we never received back word of approval. A simpler
option of running our own server became our only answer. Abyss Web Server, available
at www.apreilium.com is a free web server that may be run from any pc with Windows
XP or Vista (Help and Support, 2006). Abyss works by running our Lab PC accepting
HTTP requests from the users, which are known as web browsers, and serving them
HTTP responses along with optional data contents, which usually are web pages such
as HTML documents and linked objects (images, applets, etc.). Now, in order to access
our Lab PC/ Server, all we have to do is type in the IP address 150.104.238.130. Along
with the port under which the server is running and a html page in the directory to which
the server is pointing (on the Lab PC) will open. This html page must be named
index.html as the server displays this page first by default. The issue with this access

Zabala, Bejerano - 15
method, is that IP addresses and port numbers are very difficult to remember, thus it will
only make the remote use of the robot less attractive. The answer to this issue is to
make a domain name which will connect to our server via the IP address.
www.DYNDNS.org is a company that deals specifically with domain names, and
website development (DynDns, 2009). With the creation of a free account, the allow
access to any one of their services at no cost. Two of their services are appropriate for
our use: IP connection – which actually broadcasts our server on a domain name of our
choice, www.rtxrobot.endofinternet.com and WebHopper – which simply reroutes a user
toward our server, keeping our IP address hidden, when they type in a domain of our
choice.
4.2 How would a user control the robot?
Original Code -
The code, as it existed prior to our project, consisted of a main method in a Grapical
User Interface. Through a Jframe, it creates a window menu used to accessed the other
components of the program through action activated buttons . These buttons call the
InterRob package with 11 class files and 1 GUI class file.
- The “Connect” button refers to the ComCon file which uses
javax.comm.CommPortIdentifier to make a connection with the UMI RTX Robot
via the computers COM ports.
- The “ON” button refers to the interRob file which imports javax.comm.SerialPort .
This is the most important class file since it ties in 7 other class files, making the
robot’s movements possible. Additionally this interRob also contains the method
used to power on the robot, making it the second file to be called by the GUI.
- The “OFF” button refers to the interRob file as well, putting the robot through a
sequence of movements in order to properly calibrate it for its next use. The
movements also serve as a simple demonstration of the robots over all rage of
movement.
- The “HOME” button calibrates the robot’s position into it original intended
position. If any mechanical malfunction of the robot is entered during its prior use,
Zabala, Bejerano - 16
this calibration will assure the mechanical position and inner working of its belts
are properly aligned.
- “Move” bottoms are available for each independent movement possible by the
robot. There is also the option of a “move all” option that permits the user to
move several of the axes of motion at the same time.
- “Stop” buttons was intended in this program to terminate the operation of the
robot, in an instance where its movement would be incorrect; however the button
was originally un-operational.
4.2.1 Code Modifications
The original code’s GUI was modified into an Applet to facilitate its use through a Client
browser. This was achieved through the help of both Prof. Zalewski’s and Dr. Guo’s
notes for the COP3003 Object Oriented Programming class (Guo & Zalewski). Since
neither of us has ever created an applet or much less made anything web available, this
is where we had to begin. Our first modification was of the GUI itself. We created a
separate file name JoggleApplet.java which in the end would replace the GUI file named
Melvin_GUI.java.
- Since we were designing an Applet and not a JFrame, we would have to transfer
much of the data in Melvin_GUI into a new format.
Public class Melvin_GUI extends JFrame implements ActionListener
Was changed into
Public class JoggleApplet extends JApplet implements ActionListener
- The first area where these two programs would differ is in their definition of the
Constructor.
Since applets are organized in a different way, we found that rather than a main
method, we would have to use something called an init. Therefore,
Zabala, Bejerano - 17
Public static void main(String args[]){
Melvin_GUI G1 = new Melvin_GUI();
}
Was changed to
Public void init(){
JoggleApplet G = new JoggleApplet();
}
- Next, we changed the graphical settings. The original GUI was light grey with
orange buttons. We altered these colors to give a better coordination with our
webpage.
HomeBTN.setBackground(Color.orange);
Was changed to
HomeBTN.setBackground(Color.white);
- During execution, we noticed that when a parameter for motion was entered and
its respective move button was pushed, all pending motions would be executed.
This occurred because it was taking all the lines into account when executing the
method for robot movement (InterRob.pushpos)
if( e.getSource() == Zed_MoveBTN)
{
_Zed = Integer.valueOf( Pos_Zed.getText()).intValue();
_Sh= Integer.valueOf( Pos_Sh.getText()).intValue();
_El= Integer.valueOf( Pos_El.getText()).intValue();
_Wy = Integer.valueOf( Pos_WY.getText()).intValue();
_W1 = Integer.valueOf( Pos_W1.getText()).intValue();
_W2 = Integer.valueOf( Pos_W2.getText()).intValue();
_Gr = Integer.valueOf( Pos_GR.getText()).intValue();
inputOk=true;
checkPosition();
if(inputOk){
InterRob.pushPos(
Zabala, Bejerano - 18
_Zed,_Sh,_El,_Wy,_W1,_W2,_Gr);
}
}
Was changed into
if( e.getSource() == Zed_MoveBTN)
{
_Zed = (int) 35.5 * Integer.valueOf( Pos_Zed.getText()).intValue();
inputOk=true;
checkPosition();
if(inputOk){
InterRob.pushPos(
_Zed,_Sh,_El,_Wy,_W1,_W2,_Gr);
} Additionally, the original code also set arbitrary numbers for limits on the robots
motion.
Ex. Shoulder: 2633 to -2630, Wrist Yaw: 846 to -846 Gripper: 1200 to 0.
In order to keep the integrity but further facilitate the user’s experience with the
applet, we made all movements in the ranges from -100 to +100. By dividing the original
limits by 100, and later using that number to multiply by the input number (between -100
and +100) we return to the original value, however the user still only simple 0 to 100
digits.
Perhaps the most valuable coding change that we did came in the ComCon file. The
issue that arose once our applet had been created was that it could not load files from
the comm.jar file we had.
The exception we kept receiving stated
Java.langNullPointerException: name can’t be null while loading driver
com.sun.commwin32driver.
Zabala, Bejerano - 19
We managed to fix this problem through a series of try and catch statements. String driverName = "com.sun.comm.Win32Driver";//com.sun.comm.Win32driver
javax.comm.CommDriver driver = null;
try
{
System.loadLibrary("win32com");
System.out.println("Win32Com Library Loaded");
System.out.println("Win32Com Library Loaded");
}
catch (Exception e)
{
System.err.println(e);
}
try
{
CommDriver driver = (javax.comm.CommDriver)Class.forName(driverName).newInstance();
System.out.println("driver loaded! ");
}
catch (Exception e)
{
System.err.println(e);
}
try
{
defaultPorts = new String[8];
defaultPorts[0] = "COM1";
defaultPorts[1] = "COM2";
defaultPorts[2] = "COM3";
defaultPorts[3] = "COM4";
defaultPorts[4] = "COM5";
defaultPorts[5] = "COM6";
defaultPorts[6] = "/dev/ttyUSB0";
Zabala, Bejerano - 20
defaultPorts[7] = "/dev/ttyUKSB1";
portList = CommPortIdentifier.getPortIdentifiers();
CommPortIdentifier portid = null;
//find right comport
while(portList.hasMoreElements())
{
4.2.2 Applet in the html –
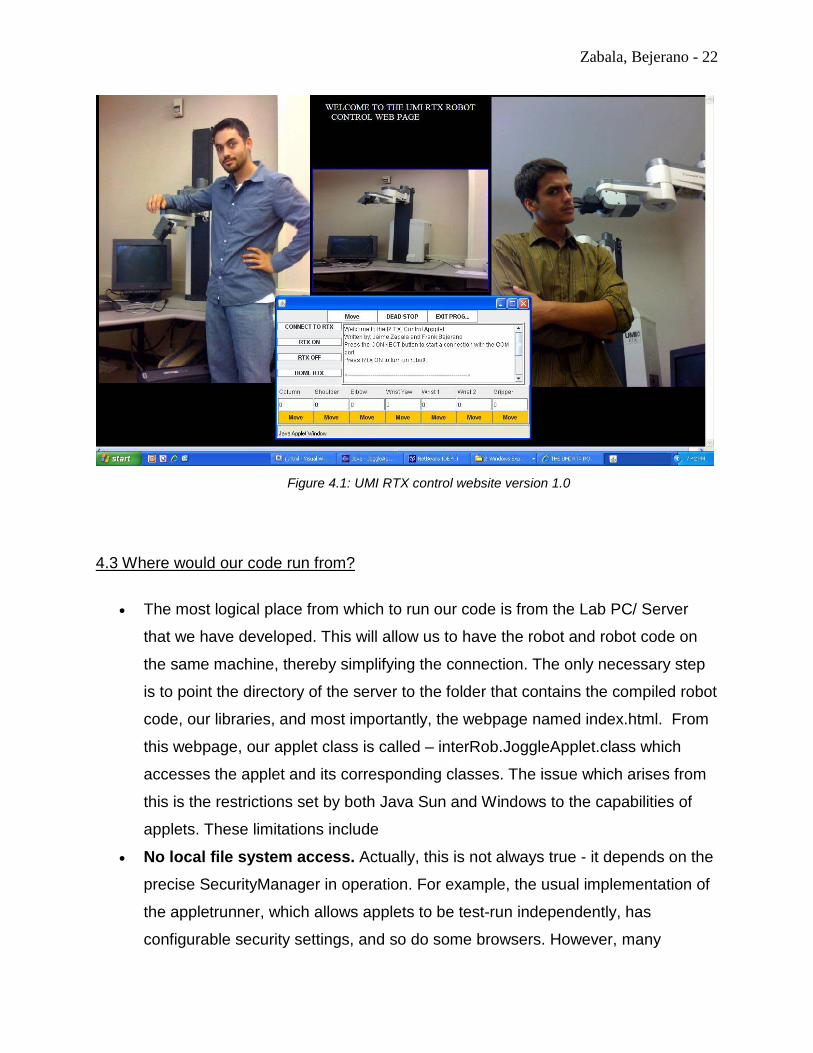
In order to make our robot available to the masses, we had to first make a webpage in
which we could place our applet. Through the use of Visual Web Developer 2008
Express Edition, we designed a simple but functional layout (Visual Web Developer,
2008). It contains attractive pictures of both developers and of course the applet itself.
Due to security reasons, the user must first consent to the applet’s download and
activate activex, after which the applet will pop-up in the center of the screen. In case
that the user’s browser is unable to load the applet or display it, a message “Your
browser does not support applets” will appear in its place.
<applet code=interRob.JoggleApplet.class ARCHIVE=comm.jar
WIDTH="0" HEIGHT="0" >
Your browser does not support applets
</APPLET>
4.2.3 User Procedure
The client or user side of this project will be very straight forward. The user must
have a fast internet connection, preferably broadband, and be able to access and
download the applet that we have created. The webpage will be located on the student
server and will be available to any FGCU student or staff member. Upon the completion
of the applet’s download, a JFrame style menu will pop up and greet the user.
("Welcome to the R.T.X. Control Applet." '\n');
("Written by: Jaime Zabala and Frank Bejerano" + '\n');
("Press the CONNECT button to start a connection with the COM port" + '\n');
Zabala, Bejerano - 21
("Press ON to get started!" + '\n');
(“Please HOME the robot to ensure proper execution!” + '\n' +
“Column (-100 to 0) Shoulder (-100 to 100) Elbow (-100 to 100) Wrist Yaw (-100 to 100) Wrist 1 (-100 to
0) Wrist 2 (-100 to 100 ) Gripper (0 to 100) “ + ‘\n’ +
"<-------------------------------------->" + ‘\n’);
The user will be asked to press the connect button to open the lab PC’s COM port for
communications with the UMI Robot. Once the connection has been established, the
user will be prompted to press the “ON RTX” button to turn on and initialize the robot.
The “Home” button takes care of all necessary initialization, since the robot is not
always turned off in the Home position. In these cases, when the robot boots on, it will
consider its present location to be Home and all movements will be relative from this
position. Also, the reason that this initialization is not made mandatory is because
sometimes the home position does not replicate itself exactly and a manual homing
must be performed. Now that the robot is online, the user must input numbers from -
100 to +100, depending on which motion is required. Then the user must press the
appropriate move button, or the one at the top of the page to execute all movements.
The user will receive almost immediate feedback through the image in the center of the
page.
Zabala, Bejerano - 22
Figure 4.1: UMI RTX control website version 1.0
4.3 Where would our code run from?
• The most logical place from which to run our code is from the Lab PC/ Server
that we have developed. This will allow us to have the robot and robot code on
the same machine, thereby simplifying the connection. The only necessary step
is to point the directory of the server to the folder that contains the compiled robot
code, our libraries, and most importantly, the webpage named index.html. From
this webpage, our applet class is called – interRob.JoggleApplet.class which
accesses the applet and its corresponding classes. The issue which arises from
this is the restrictions set by both Java Sun and Windows to the capabilities of
applets. These limitations include
• No local file system access. Actually, this is not always true - it depends on the
precise SecurityManager in operation. For example, the usual implementation of
the appletrunner, which allows applets to be test-run independently, has
configurable security settings, and so do some browsers. However, many

Zabala, Bejerano - 23
browsers do not permit any file system access, so it is very unwise to rely on it.
This effectively means that an applet cannot access data files, or store state
information, on the client's file system.
• Network access only to the launching server. Strictly speaking, this need not
be true either, though in practice it usually is. Again it depends on the
environment in which the applet is run, but as with file system access many
environments do not allow this to be configured. This means that the only reliable
source of data and storage for an applet is on its host server.
• Cannot extract important information about client. Not all important
information about a client is only held on the file system - sensitive data is held in
memory as well. Applets should not have access to such information.
(Incidentally, the definition of 'not important' includes things like line and file path
separators, and 'important' includes username, email address etc.)
• No local executables. Applets are not permitted to invoke any local executable
program on the client's machine.
Zabala, Bejerano - 24
Figure 4.2: Internet Connectivity Chart
So in order to get past these restrictions, there are some loopholes we must travel
through (FAQ Applet Security, 1995). First are the java policy files. Java has a security
folder located in <Java edition>/lib/security which contains all the security rights for
different applications and applet executions. Here we must place a file to allow applets
to engage in procedures they otherwise would be prevented from doing. Jonathan Eren
and Neven Skoro created such a policy file named Java.policy.applet, which grants all
properties to any applet on the machine. Secondly, our code uses javax.comm to open
a com port and “listen” to the robot, and must be included in the ‘lib’ folder. Thirdly, the
extra libraries which we use must be placed in the ‘bin’ folder also within the java folder,
so when the applet access the java codes, these files will be available and allow the
applet to properly execute. As a “just in case” we have also signed and certified our
applet for use on the Lab PC, and both our lab tops. Finally, the line
System.setSecurityManager(null);
has been added to the top of the methods to bypass the restrictions not allowing the
applet to read internal files. If these steps are followed on both client and server
machine (those applicable), this should further ensure proper communication between
robot and applet. A more complete list of applet restrictions may be found at
http://java.sun.com/sfaq/ .
4.4 How will the user know the robot is working?
The plan all along was to allow the user to see the robot in real time, over
streaming live video. Streaming video entails both video and sound. The issue here was
that it was making our website too slow to load, and along with a fairly complex applet,
the browser required nearly a minute to fully load the page. Since we did not really
require sound, it seemed unnecessary to have the said streaming video and perhaps a
better solution could be arrived at, again, through our own web server. The discovery of
Dorgem software opened up a new possibility (Dorgem Webcam Capturer, 2005).
Dorgem is an open source webcam capture program that takes still pictures through a
webcam and places them in a file, repeatedly refreshed every n-th second/minute/hour.
Zabala, Bejerano - 25
The problem here was that if we used this approach and placed the image on our
webpage, it would have to be repeatedly refreshed in order to see the movements of the
robot. This in turn would mean waiting for the page to load numerous times and the
presence of multiple applets. The solution was found by incorporating a refresh
sequence into the HTML code under which the image was placed.
<IMG src="rtx.jpg" width="275" height="200" border="1" name="refresh">
<SCRIPT language="JavaScript" type="text/javascript">
<!--
var t = 1 // interval in seconds
image = "rtx.jpg" //name of the image
function Start() {
tmp = new Date();
tmp = "?"+tmp.getTime()
document.images["refresh"].src = image+tmp
setTimeout("Start()", t*1000)
}
Start();
// -->
</SCRIPT>b
As you can see, the function start is created which calls the refresh of only rtx.jpg
(our captured image which is in turn also refreshed ever 1 second). This code makes it
possible to have a video, albeit slow and disjoint, and a much faster webpage.
Zabala, Bejerano - 26
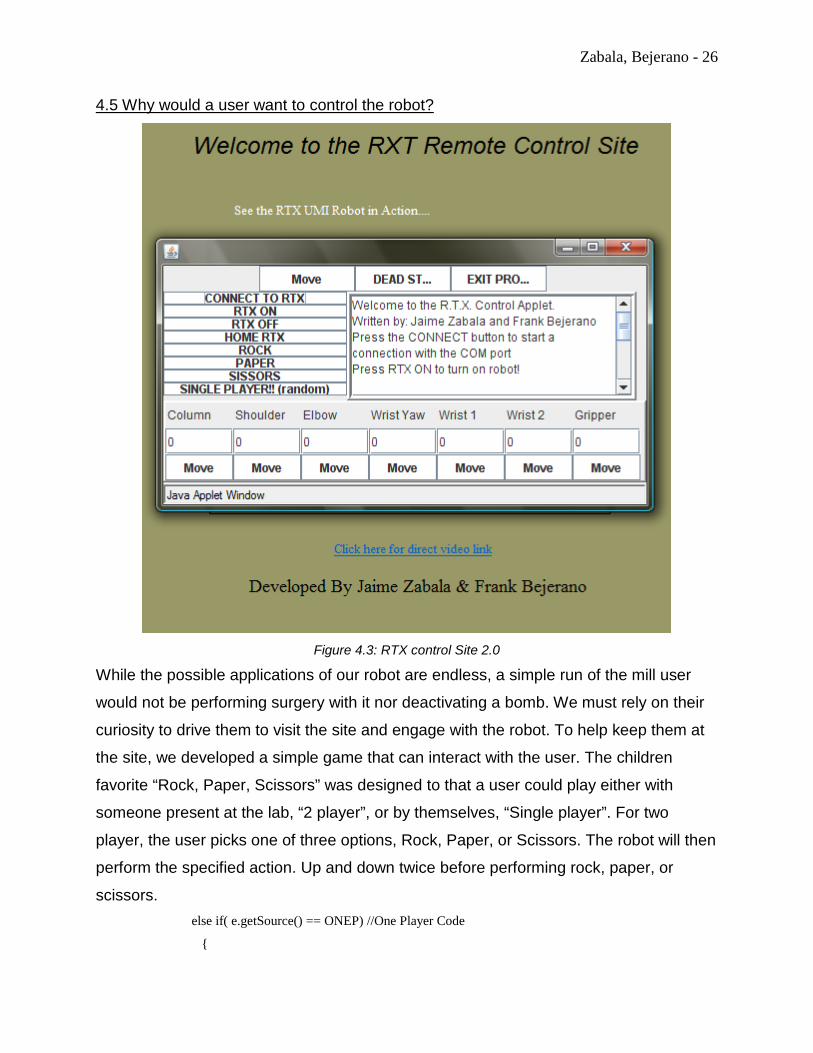
4.5 Why would a user want to control the robot?
Figure 4.3: RTX control Site 2.0
While the possible applications of our robot are endless, a simple run of the mill user
would not be performing surgery with it nor deactivating a bomb. We must rely on their
curiosity to drive them to visit the site and engage with the robot. To help keep them at
the site, we developed a simple game that can interact with the user. The children
favorite “Rock, Paper, Scissors” was designed to that a user could play either with
someone present at the lab, “2 player”, or by themselves, “Single player”. For two
player, the user picks one of three options, Rock, Paper, or Scissors. The robot will then
perform the specified action. Up and down twice before performing rock, paper, or
scissors. else if( e.getSource() == ONEP) //One Player Code
{
Zabala, Bejerano - 27
Random rn = new Random();
int r = rn.nextInt(3);
if (r==0){
///Code for Scissors
}
Else if (r==1){
// Code for Rock
}
Else {
// Code for Paper
}
If the user chooses the Single player option, then he/she will play against the same
three choices, only they will be generated randomly. When the game is done the user
should click EXIT PROGRAM and the applet will close, leaving the web page still open.
5. Conclusion & Future Work 5.1Why doesn’t the applet connect with the robot? –
As we wrote the applet, being our first, we constantly compiled and executed on
the Eclipse software. This software, we believed, would give us an accurate portrayal of
how the applet would behave in a browser. When it came time to actually run the applet
from an existing webpage, we found that although the applet did appear and there was
some functionality from the buttons, there was no connection to the robot. A few probes
were inserted within the JoggleApplet (applet) file, the ComCon (connection) file, and
the InterRob (miscellaneous) file. When the appropriate buttons were pushed, the probe
would trigger an additional window to pop up, containing the probe #. We found that
probes placed at the beginning of the respective methods would execute correctly, that
as files like win32.dll and drivers were initialized (com port driver used to connect to
robot), the applet would hit a brick wall. Again, we compiled and ran the code in Eclipse
and appletviewer, both successfully.
So why does our applet run correctly in all places except browsers?
The issue, as we discovered, has to deal with the restrictions on applets as set
down by many factors, the least of which is exceptions or compiler errors.
Zabala, Bejerano - 28
Apparently there is a compatibility war between Sun Microsystems and Microsoft
that has left many casualties, us included. The problem lays in the policy and
securities set down by Microsoft for its operating systems and the rights available
to java. Without extensive knowledge in both networking and java, along with a
little luck, it would be impossible to get past this roadblock that we have
experienced.
5.2 A Different Approach
There may be a different way to run the robot remotely. This would be fairly more
complicated than our current implementation, however through a manipulation of the
said restrictions, we may be able to find workable solution, using the same applet
and corresponding code.
1. A new method would have to be added to the existing code, with a loop which
runs during the entirety of execution. It would check for the existence of a file
named appletinput.txt in the same folder as the applet code.
2. During the execution of the applet in the webpage on the user side, the applet is
used as a form, to simply take down the operations.
3. Maintaining a persistent state, the applet writes to a file in the server-side which
is then sought out by the loop which should already be executing.
4. The file is then used by the loop and the numbers from the form are inserted into
a movement sequence, much like that of HOME or the game buttons.
5.3 Password Protection
The addition of a password protection page will help control who can and who can’t
use the robot. The concern is that two or more users will attempt to simultaneously
use the applet to control the robot, causing errors. By prompting any user who
enters the website for a password and username, we may better control the access
of our website to a select few. Although we are not featuring this in our final website,
I did test it out on a simple helloworld.html. The password protection works by
creating a simple html document in VS Web Developer 2008 which will feature
password and username boxes. A series of “if” statements confirming the correct
username and password will link the user to the next page where the robot is
located.

Zabala, Bejerano - 29
Works Cited Aim Instant Messenger. (n.d.). Retrieved from America On Line: http://dashboard.aim.com/aim BBC News. (2006, November 28). Retrieved February 27, 2008, from BBC.com:
http://news.bbc.co.uk/nolpda/ifs_news/hi/newsid_6189000/6189228.stm Dorgem Webcam Capturer. (2005). Retrieved from Dorgem: http://dorgem.sourceforge.net/ DynDns. (2009). Retrieved from A Dynamic Network Services Website: http://dyndns.org FAQ Applet Security. (1995, December). Retrieved from java Sun: http://java.sun.com/sfaq/ Guo, D., & Zalewski, J. (n.d.). Itech.fgcu.edu. Retrieved from FGCU Faculty Database:
http://itech.fgcu.edu Help and Support. (2006). Retrieved from Aperilium: http://www.aprelium.com/support/ Knight, G. (1999, June 18). UMI ROBOT USER AND PROGRAMMER’S MANUAL. Retrieved
from Computer Systems Design: http://services.eng.uts.edu.au/~carlo/pdf/Hitsquad_Robot_Manual.pdf
MDA Essential Information Solutions. (2006). Retrieved from MDA.com:
http://sm.mdacorporation.com/what_we_do/canadarm2.html Skoro, N., & Eren, J. (2006, April). A Study on Robotics. Retrieved from Florida Gulf Coast
University: http://itech.fgcu.edu/faculty/zalewski/COP4935/RTX-ReportApril06.doc Visual Web Developer. (2008). Retrieved from Microsoft.com:
http://www.microsoft.com/express/vwd/ Y! LIVE. (2008). Retrieved from Yahoo: http://live.yahoo.com