the gpm microwave imager and combined precipitaon algorithms
TRANSCRIPT

8th Workshop of International Precipitation Working Group 5thInterna*onalWorkshoponSpace-basedsnowfallMeasurements
3-7 October 2016 Bologna, I
TheGPMMicrowaveImagerandcombinedprecipita7on
algorithms
Christian Kummerow Colorado State University
8th IPWG and 5th IWSSM Joint Workshop Bologna, 3-7 October, 2016
Minimum Variance Framework
y = f (x,b)
y = Observed Brightness Temperatures (Tbs)x = State Vector (precipitation water)b = Forward Model Parameters (SST, total precipitable water, surface wind speed, integrated cloud liquid water, ice particles)f = Forward Model (operates on x and b)
Goal: Minimize Φ (e.g. find x that yields forward computed Tbs which agree with observed Tbs
Φ = (y− f (x,b))

Minimum Variance Framework
2 equations with 2 unknowns
easy
2 barely independent equations with 2 unknowns
hard

Optimal Estimation Framework
€
y = f (x,b) + εb + εyy = Observed Brightness Temperatures (TBs)εb, εy = Error Term (model parameter, measurement error)x = State Vector (total precipitable water, TPW; surface wind speed, WIND; integrated cloud liquid water, LWP)b = Forward Model Parameters (i.e. Scale Height, Lapse Rate, SST)f = Forward Model (operates on x and b); usually the radiative transfer model
Goal: Find that yields forward computed TBs which agree with observed TBs within allotted error range
€
x

Minimize cost function:
€
Φ = (y − f (x,b))T SY−1(y − f (x,b))
TERM 1 + (x − xA )
T SA−1(x − xA )
TERM 2
€
SY = Errors in Measurements and Model
Minimize Differences between Observed and Simulated TBs
Minimize Differences between a priori and retrieved states
€
SA = Errors in xa
€
y = f (x,b) + εb + εy
Optimal Estimation Framework

E(Rj ) =RiJi
i∑
Jii∑
, i =1,n
E(Δw2 ) =
[Rj −E(Rj )]2 J j
j∑
J jj∑
, j =1,n
Ji = exp −12tbo − tb(Ri )⎡⎣ ⎤⎦
TSy +SA( )
−1tbo − tb(Ri )⎡⎣ ⎤⎦
⎧⎨⎩
⎫⎬⎭
Bayesian Retrieval Retrieval
Simplified Bayesian retrieval with assumption that pdf’s of both hydrometeor profiles and observations are realistic and representative:
Expected value Of hydrometeor profile Expected value of errors Cost-function
Observed Simulated Observation & TB-vector TB-vector modelling error
covariance matrix
P(R |Tb )∝P(R)×P(Tb |R)
P(R |Tb )∝P(R)×P(Tb |R)
yi yobs yobs ; σnoise

TheGPMradiometeralgorithm
~ 10 km
TB observed
TB model #1
TB model #2
TB model #3~10 km
TB observed
TB database profile #1
TB database profile #2
TB database profile #3
Step1:UseTRMM/GPMSatellitetoderivesetof“Observed”profilesthatdefineana-prioridatabaseofpossiblerainstructures.
Step2:CompareobservedTbtoDatabaseTb.Selectandaveragematchingpairs
Ji = exp −12tbo − tb(Ri )"# $%
TO+S( )−1 tbo − tb(Ri )"# $%
&'(
)*+

GPROF 2010 w. observed database

South Africa
GPROF 2010 w. observed database

GMI Rainfall w. observed database

GMI Rainfall w. observed database

GMI Rainfall w. observed database

E(Rj ) =RiJi
i∑
Jii∑
, i =1,n
E(Δw2 ) =
[Rj −E(Rj )]2 J j
j∑
J jj∑
, j =1,n
Ji = exp −12tbo − tb(Ri )⎡⎣ ⎤⎦
TSy +SA( )
−1tbo − tb(Ri )⎡⎣ ⎤⎦
⎧⎨⎩
⎫⎬⎭
Bayesian Retrieval Retrieval
Expected value Of hydrometeor profile Expected value of errors Cost-function
Observed Simulated Observation & TB-vector TB-vector modelling error
covariance matrix
P(R |Tb )∝P(R)×P(Tb |R)
yi yobs yobs ; σnoise
The Bayesian formulation favors results of profiles that occur often in nature. But rare meteorological conditions can also be penalized.

GPROF 2014 Evolution
For Operational Algorithm:
Try not to mix different surface types Try not to mix different environmental conditions

Cloud Profiles Partitioned by TPW

GPROF 2014 Unified Algorithm Structure
PreProcessor (sensor specific)
Standard input file
Spacecraft position Pixel Location, Tbs Pixel Time, EIA Chan Freqs & Errors
GPROFPrecipita*onAlgorithm
L1C Sensor Data Surface&EmissivityClassesECMWF/GANALT2m,TPWAutosnowSnowCoverReynoldsSea-Ice
Ancillary Info / Datasets
SensorProfileDatabase
Complete HDF5 Output file
Post-processor(BinarytoHDF5)
A-PrioriMatchedProfiles-GMI/DPR
JMAforecast-NRTGANAL-Standard
ECMWF-Climatology
Model Preparation
DenotesProcessesrunningattheSIPS
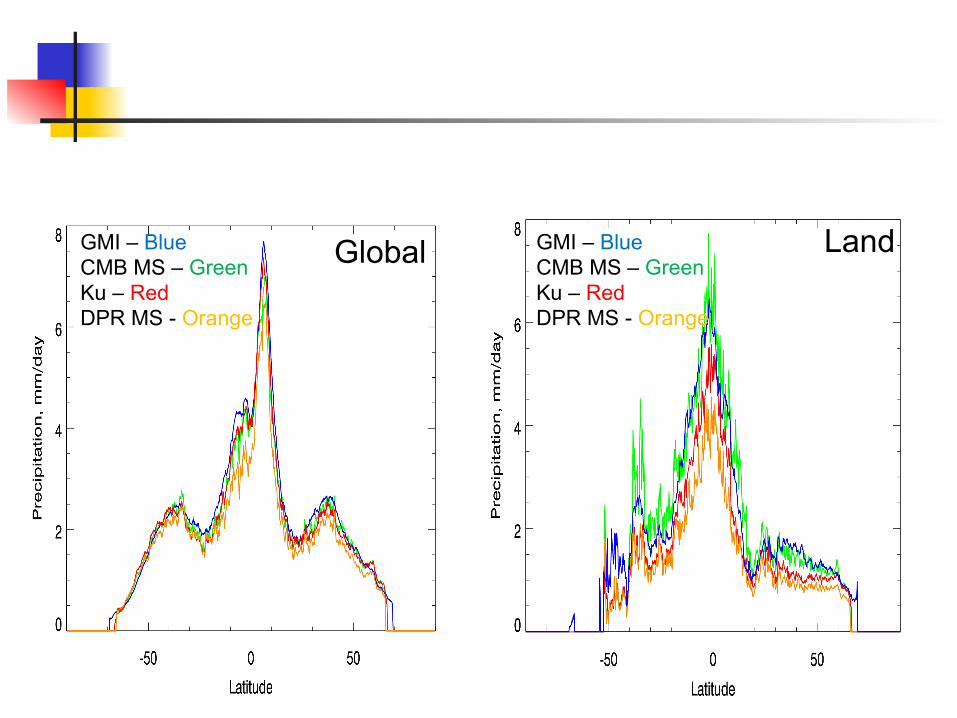
Global GMI – Blue CMB MS – Green Ku – Red DPR MS - Orange
Land GMI – Blue CMB MS – Green Ku – Red DPR MS - Orange

Rain gauges
Radar Dbase w. Ku
Dbase w. CMB MS

Land GMI – Blue CMB MS – Green Ku – Red DPR MS - Orange
Global GMI – Blue CMB MS – Green Ku – Red DPR MS - Orange


-90
-60
-30
0
30
60
90
0 2 4 6 8 10
La#tude
mm/day
ANNUALSNOWFALLMERRASnowSep14-Aug15
ERASnowSep14-Aug15
-90
-60
-30
0
30
60
90
0 2 4 6 8 10
La#tude
mm/day
ANNUALRAINFALLMERRARainSep14-Aug15
ERARainSep14-Aug15
-90
-60
-30
0
30
60
90
0 2 4 6 8 10
La#tude
mm/day
ANNUALTOTALPRECIPITATIONMERRATotalPrecipSep14-Aug15
ERATotalPrecipSep14-Aug15

Neededwork
² Vertical structure of precipitation over land is still not well captured.
Convective/Stratiform separation or CAPE / other storm organizing characteristics will improve the algorithm
² Work with Combined Team to make a consistent a-priori database over land
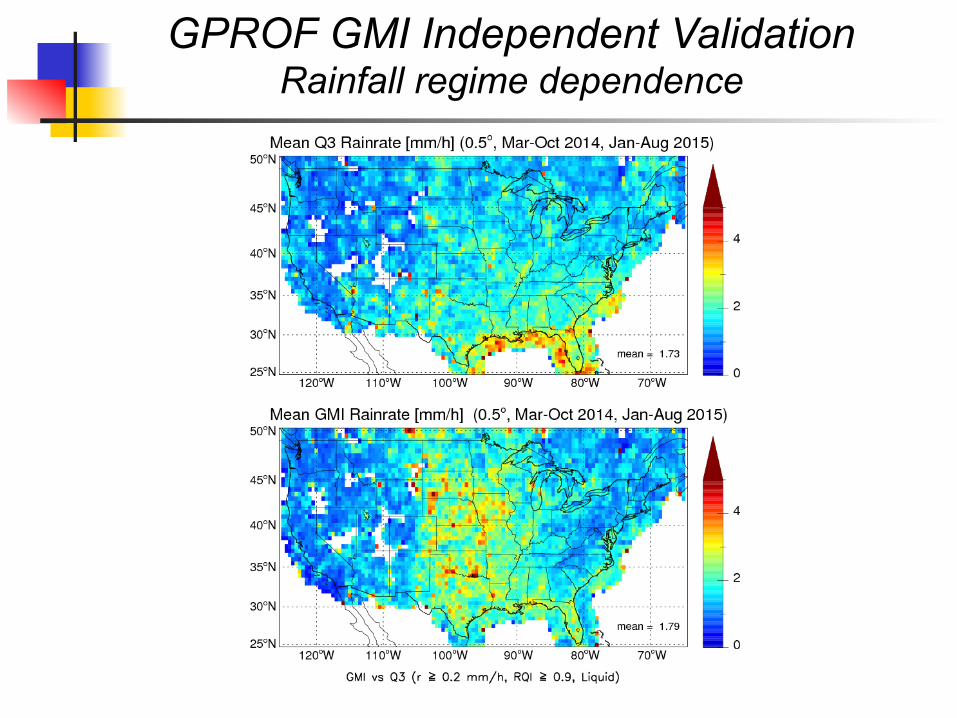
GPROF GMI Independent Validation Rainfall regime dependence

Bias w. Convective Fraction
From Pierre Kirstetter, NOAA, NSSL

TRMM Precipitation Anomalies and ENSO

Deep Organized Regimes
Radiometer Rain Rate Radar Rain Rate
Sat
ellit
e R
ain
Rat
e
Dual-Pol Derived Rain [mm/hr]
From David Henderson

The a-priori database

Radars can use straightforward Z-R relations, except: n Even when dual frequency observations are available,
radar-only retrievals are uncertain n Drop size distribution variability is the main source of
uncertainties in reflectivity precipitation relationships n For small drops the dual frequency equations are identical n Reflectivity factors may be subject to severe attenuation
The a-priori database (A dual frequency radar/radiometer algorithm)

§ Derive an ensemble of radar-only precipitation retrievals. Variable XR includes: § Parameterized profiles of particle size distribution
intercepts (Λ) § Parameterized cloud water and relative humidity
profiles § Surface emissivity models
§ Simulate brightness temperatures § Statistically analyze the relationships between
simulated brightness temperatures and XR to derive retrievals consistent with the observations
Ensemble Methodology Formulation

“Basic” DPR+GMI Algorithm Architecture
Upda*ng/FilteringRequired
Obs.GMITB’s
Dual-WavelengthRadar
Algorithm
Obs.Z’s,PIA’s,classifica*on
Es7matedProfilesofPSD’s
TPW,CLWP,PIA,µ, ρice,etc.
SimulateTB’satconstella7on
radiometerchans.andvalidate
offline
RadiometerDatabases
Radia7veTransfer
SimulatedGMITB’s
AgreementwithObservedTB’s?
OK
surfaceemission
FinalEs7matedProfilesofTPW;CLWP,PSD’sρice,etc.,&errors
GMIAntennaPaRernConvolu7on
Consistent Physics / A Priori
Information
EmissivityModule
offline

Prototype Algorithm Architecture (Radar Module)
SRT estimates of PIAKu and PIAKa
analysis of p, T, q, and
CLW profiles
DPR ZKu and ZKa
initial ensemble of q, CLW profiles;
calc. atten. at Ku, Ka
recursively ensemble filter a priori NW,Do using ZKu,Ka
ensemble filter NW, Do profiles using
PIAKu,Ka Output is ensemble of NW,Do profiles consistent with ZKu,Ka and PIAKu,Ka , given q, CLW.
€
n D( ) = Nw f µ( ) DDo
⎛
⎝ ⎜
⎞
⎠ ⎟
µ
exp −3.67+µDo
D⎛
⎝ ⎜
⎞
⎠ ⎟
Precip. size distribution:
2

Ensemble Kalman Filtering Approach
• Assume a priori ensemble, xi, of desired parameter, x.
• Use forward model y = f(x) to simulate observable yi for each xi.
• Update xi using yobs and covariance σxy of xi and yi :
xi’ = xi + σxy / (σyy + σ2noise) • (yobs - yi)
• take mean of xi (solution) and standard deviation of xi (uncertainty).
xi
y = f(x)
xi’ xi’ σx ’ i
yi yobs yobs ; σnoise
8

Prototype Algorithm Architecture
SRT estimates of PIAKu and PIAKa
analysis of p, T, q, and
CLW profiles DPR ZKu and ZKa
initial ensemble of q, CLW profiles;
calc. atten. at Ku, Ka
recursively ensemble filter a priori NW,Do using ZKu,Ka
ensemble filter NW,Do profiles using
PIAKu,Ka
assign Tsfc, emissivities
randomly to DPR-derived
profile ensembles
analysis of Tsfc,
emissivities (U10)
simulate TBGMI using DPR-derived
profile member
filter DPR solutions using Gibbs sampling
procedure
save estimates and uncertainties
GMI TB’s
Output is ensemble of NW, Do, q, CLW profiles and emissivities consistent with ZKu,Ka , PIAKu,Ka , and GMI TB’s.
3

Components -- Default Algorithm
• Radiative Transfer Module
- Eddington’s Second Approximation (Yes)
- inputs: PSD profile parameters (No*, Do, mu, rho-ice);
temperature, humidity, cloud water profiles;
surface skin temperature, emissivities.
- output: brightness temperatures in GMI channels.

Joint Distributions of Surface Rainfall Reference and Retrieved

Land GMI – Blue CMB MS – Green Ku – Red DPR MS - Orange
Global GMI – Blue CMB MS – Green Ku – Red DPR MS - Orange

Why is CMB so low high latitude ocean?

Summaryofneededwork
² The algorithm Currently uses the non-uniform beam filling that is
different from DPR Ku. Need reconciliation
² The algorithm starts with radar solutions. If no echo, then no precipitation. Need flexibility to deal consistently with light precipitation that only GMI can detect.
In general
² Focus more on product availability and assessments to guide future development.