team cornell’s skynet: challenges and achievements in ... · team cornell’s skynet: challenges...
TRANSCRIPT
Team Cornell’s Skynet: Challenges and Achievements in Urban
Perception and Planning
Speaker:
Isaac MillerTeam Leaders:
Mark Campbell, Dan Huttenlocher

2 of 21
Team Cornell’s “Skynet”
• 2007 Chevrolet Tahoe: steering, throttle, brake, transmission actuated• Front sensing: 3 Ibeo LIDARs, 5 Delphi radars, 2 optical cameras• Back sensing: 1 SICK LIDAR, 3 Delphi radars, 1 optical camera
Delphi millimeter- wave radar
Ibeo LIDAR
Basler optical camera
Velodyne LIDAR
SICK LIDAR

3 of 21
Team Cornell’s “Skynet”
• Litton LN-200 tactical grade inertial measurement unit (IMU)• Stock GM ABS wheel encoders, 64 count / revolution• Septentrio PolaRx2e@ 3-antenna GPS / WAAS receiver• Trimble Ag252 high precision (HP) differential corrections receiver
Septentrio PolaRx2e@
Trimble Ag252
GM ABS wheel
encoder
Litton LN- 200 IMU
4 of 21
Team Cornell’s “Skynet”
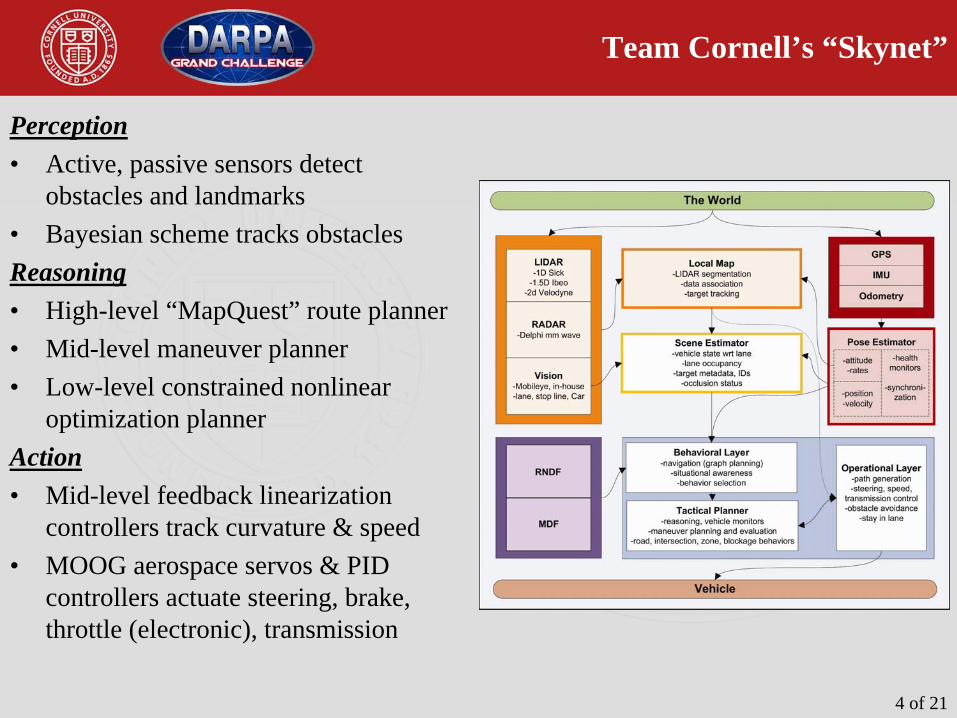
Perception• Active, passive sensors detect
obstacles and landmarks• Bayesian scheme tracks obstaclesReasoning• High-level “MapQuest” route planner• Mid-level maneuver planner• Low-level constrained nonlinear
optimization plannerAction• Mid-level feedback linearization
controllers track curvature & speed• MOOG aerospace servos & PID
controllers actuate steering, brake, throttle (electronic), transmission
5 of 21
Real-Time Data Distribution
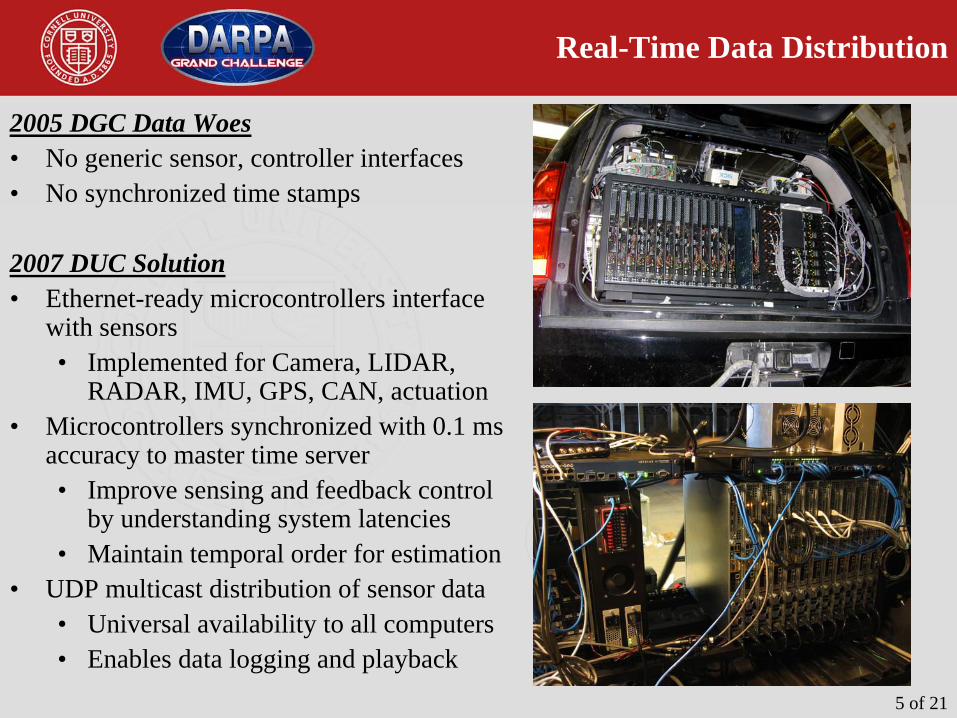
2005 DGC Data Woes• No generic sensor, controller interfaces• No synchronized time stamps
2007 DUC Solution• Ethernet-ready microcontrollers interface
with sensors• Implemented for Camera, LIDAR,
RADAR, IMU, GPS, CAN, actuation• Microcontrollers synchronized with 0.1 ms
accuracy to master time server• Improve sensing and feedback control
by understanding system latencies• Maintain temporal order for estimation
• UDP multicast distribution of sensor data• Universal availability to all computers• Enables data logging and playback
6 of 21
Attitude and Position Estimation
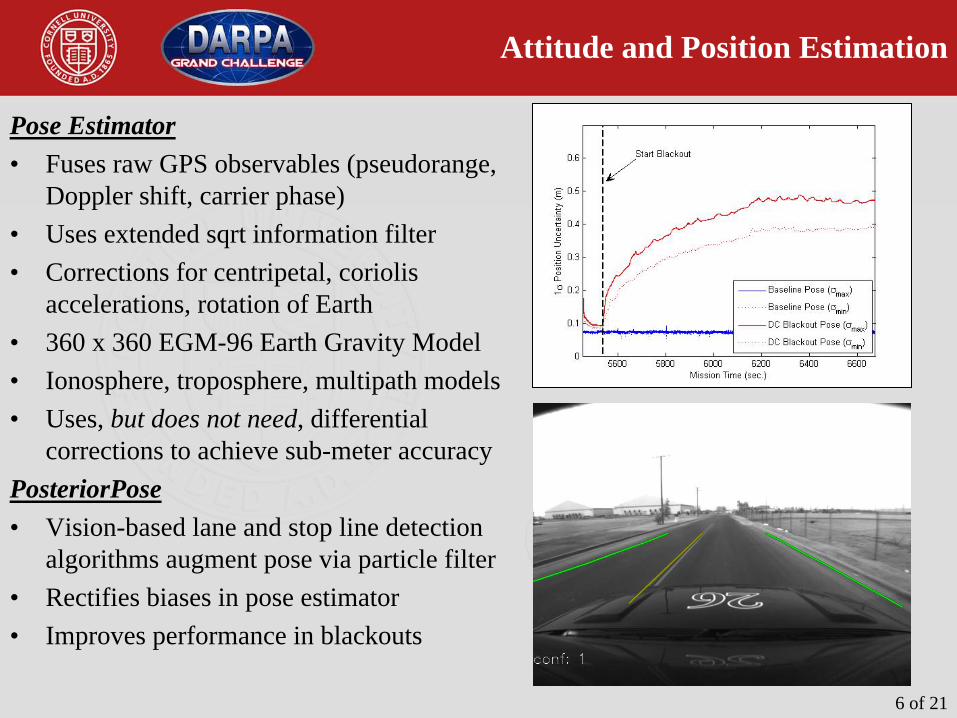
Pose Estimator• Fuses raw GPS observables (pseudorange,
Doppler shift, carrier phase)• Uses extended sqrt information filter• Corrections for centripetal, coriolis
accelerations, rotation of Earth• 360 x 360 EGM-96 Earth Gravity Model• Ionosphere, troposphere, multipath models• Uses, but does not need, differential
corrections to achieve sub-meter accuracyPosteriorPose• Vision-based lane and stop line detection
algorithms augment pose via particle filter• Rectifies biases in pose estimator• Improves performance in blackouts

7 of 21
Obstacle Detection and Tracking
Algorithm Overview1. Segmenting sensor data2. Determining number of obstacles /
assigning measurements3. Tracking obstacles4. Determining tracked object metadata 5. Maintaining stable track IDs
• Key design choice: obstacles not assumed to have structured motion
• Key design choice: interface between obstacle tracker / planner based on assigned obstacle identification tag

8 of 21
Obstacle Detection and Tracking
Segmenting Sensor Data• Multiple sensors (laser, radar, camera)
fused at object tracking level• Delphi radar tracks used “as is”• MobilEye camera tracks used “as is”• LIDAR detections segmented
• Grid-based ground model constructed from low-pass filtered LIDAR, similar to DGC ’05
• Ground model Skynet-centric• Subtract “obvious” static
environment using ground model• Remainder of points may still be
cars, must be considered further
Gray Unclassified

9 of 21
Obstacle Detection and Tracking
Clustering LIDAR Data• LIDAR obstacle points clustered into
objects via Euclidean distance• 1m spacing rule defines cluster bounds• Multi-threshold, single frame
clustering removes unstable clusters• Occlusion contours determined via
range reasoning• Stable measurements extracted
• Occlusion contour bearings• Range to closest point
• Key point: segmentation is brittle, so only extract measurements from distinct, stable objects
Gray Unclassified
Ego-vehicle
Stable clusters Unstable clustersGround hits
3 Ibeos, 12 colored laser beams

10 of 21
Obstacle Detection and Tracking
Determining the Number of Obstacles• Factorize over assignments N and
obstacle states O:
• Data assignment solved by particle filter
• Tracking solved by hybrid sigma point filters run for each obstacle in each particle
• Each particle is a complete hypothesis of the world – 4 for DUC
• Number of obstacles is determined automatically in the filter
• Inexpensive: particles are only used for measurement assignment
( ) ( ) ( )ZNOpZNpZONp ,, ⋅=( )ZNp
( )ZNOp ,
Tracked objects
Untracked obstacle points

11 of 21
Obstacle Detection and Tracking
Tracking Obstacles• Obstacle points stored in obstacle-centric frame, with floating origin• Obstacle state: 2d rigid body transform + ground speed, heading• EKF prediction integrates rigid body transform over time, sigma point update
compares predicted and measured points to update transform & velocity• Cluster points replaced after each update• Fixed measurement location (back axle or center of mass) not required
Tracked objects

12 of 21
Obstacle Detection and Tracking
Tracked Object Metadata• Raw tracking data too low-level• Planner needs behavior-level metadata
• HMM used to tell if car-like and whether stopped/disabled
• Monte Carlo sampling used for obstacle lane occupancy probabilities• Tracker predicts when obstacles
should be visible and when not• Occlusion reasoning persists
tracked obstacles when not visible• Obstacles only deleted when there’s
evidence they don’t existOccluded, stopped
Visible, stopped
Visible, moving
Ego-vehicle

13 of 21
Obstacle Detection and Tracking
Maintaining Track Identification• Track IDs generated from obstacles via global maximum likelihood matching to
previous frame given all measurements Z
• Stable cluster measurements used to match existing tracks with new obstacles• Dynamic programming solves correspondences efficiently• Persistent track IDs allow frame-to-frame reasoning in planner
( ) ( ) ( )( )ZkOkOpkO ii
=+=+ 1maxarg1
Tracked obstacles
Untracked points
Ego vehicle

14 of 21
Obstacle Detection and Tracking

15 of 21
Intelligent Planning
• Decision making and execution• Behavioral (macro planning): route planning, replanning• Tactical (local planning): changing lanes, passing, intersections, merging• Operational (plan execution): path generation
• Robust against unforeseen, complex scenarios
16 of 21
Intelligent Planning
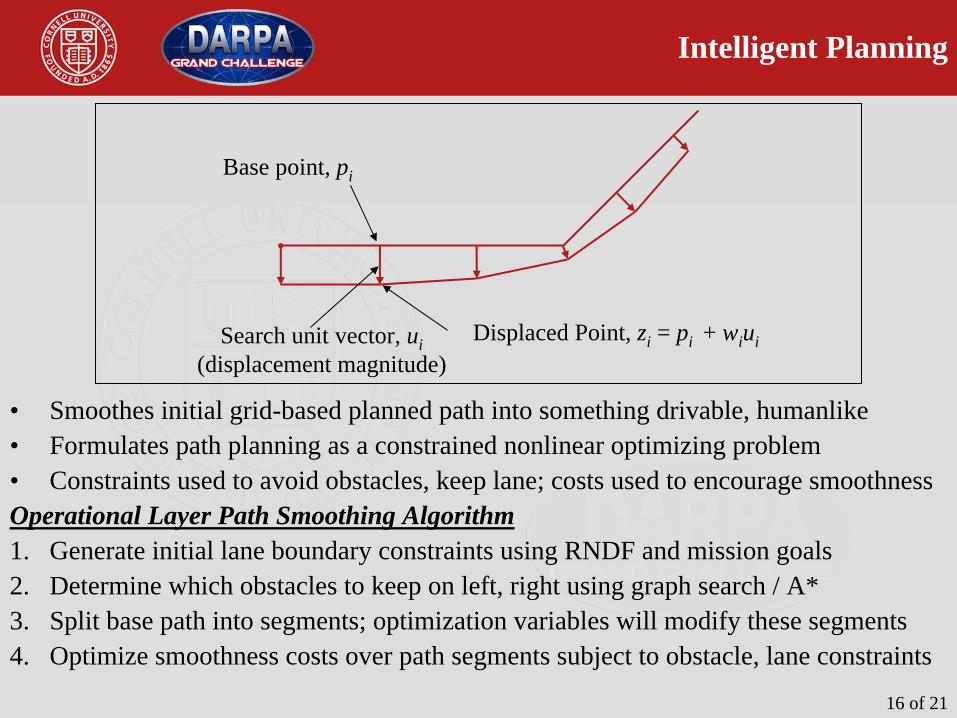
• Smoothes initial grid-based planned path into something drivable, humanlike• Formulates path planning as a constrained nonlinear optimizing problem• Constraints used to avoid obstacles, keep lane; costs used to encourage smoothnessOperational Layer Path Smoothing Algorithm1. Generate initial lane boundary constraints using RNDF and mission goals2. Determine which obstacles to keep on left, right using graph search / A*3. Split base path into segments; optimization variables will modify these segments4. Optimize smoothness costs over path segments subject to obstacle, lane constraints
Base point, pi
Search unit vector, ui(displacement magnitude)
Displaced Point, zi = pi + wi ui

17 of 21
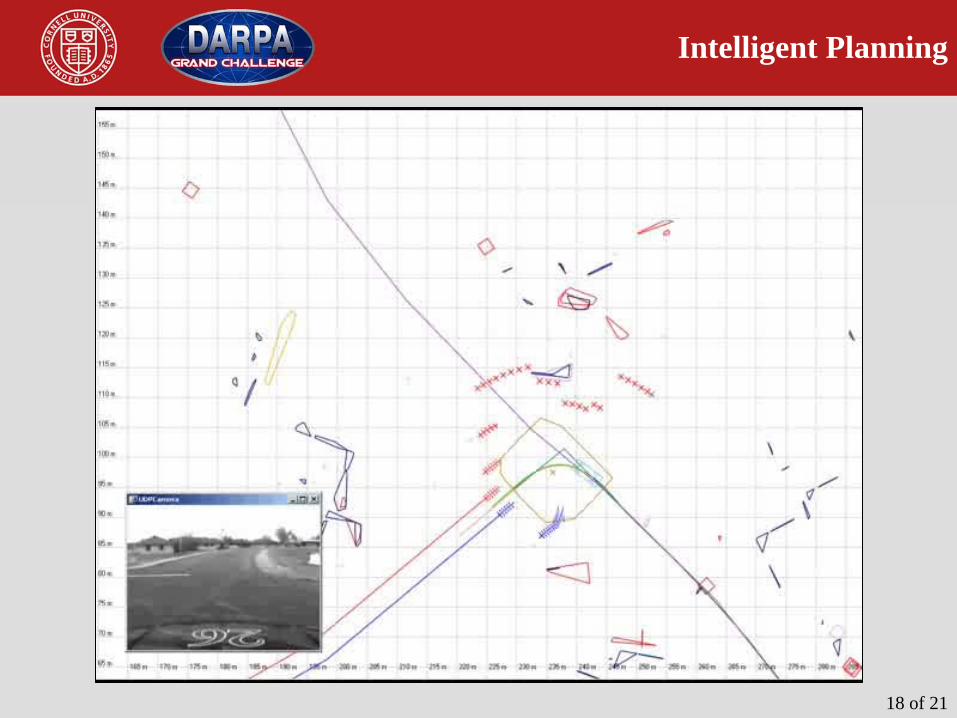
Intelligent Planning
RNDF
Laneboundaries
Convex hulls of obstacles
Ego- vehicle
Plannerconstraints
Constraints around parked car
18 of 21
Intelligent Planning
19 of 21
Overall DUC Statistics
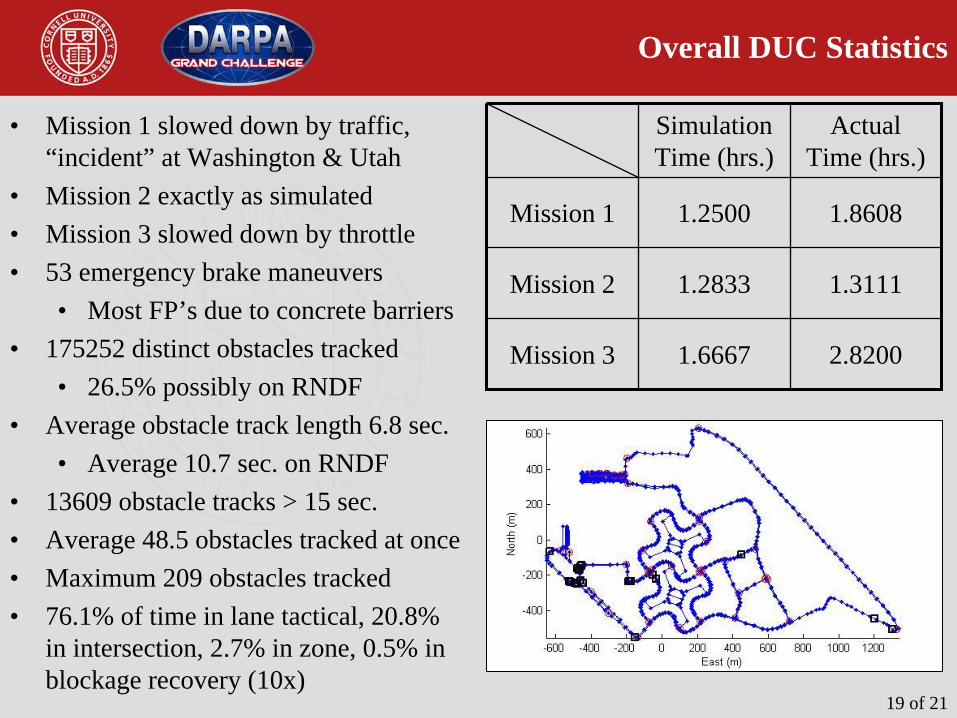
• Mission 1 slowed down by traffic, “incident” at Washington & Utah
• Mission 2 exactly as simulated• Mission 3 slowed down by throttle• 53 emergency brake maneuvers
• Most FP’s due to concrete barriers• 175252 distinct obstacles tracked
• 26.5% possibly on RNDF• Average obstacle track length 6.8 sec.
• Average 10.7 sec. on RNDF• 13609 obstacle tracks > 15 sec.• Average 48.5 obstacles tracked at once• Maximum 209 obstacles tracked• 76.1% of time in lane tactical, 20.8%
in intersection, 2.7% in zone, 0.5% in blockage recovery (10x)
Simulation Time (hrs.)
Actual Time (hrs.)
Mission 1 1.2500 1.8608
Mission 2 1.2833 1.3111
Mission 3 1.6667 2.8200

20 of 21
Even When Everything Goes Right…
21 of 21
Lessons Learned
• Synchronization and accurate time stamps permit stable tracking• Accurate, continuous pose estimator foundation of successful driving• Fusion of multiple data sources, including vision, important for
vehicle localization• Sensor segmentation algorithms are brittle at best
• Model the ground to remove ground hits for better clustering• Stable clusters not enough, need stable measurements
• Evidence from raw sensors cleans up tracking mistakes• Stable track metadata critical for high level reasoning• Constrained optimization mature enough for real-world path planning• Deterministic high-level reasoning is delicate for urban driving• Many single points of failure inevitable; must understand the risks