taller i control automatico i
TRANSCRIPT

INACAP VALDIVIAING. AUTOMATIZACIÓN Y CONTROL INDUSTRIALCONTROL AUTOMATICO I
TALLER N°1
Integrantes:
Profesor:
Nombre Profesor:
Fecha: 22/11/2013

INTRODUCCIÓN.
Un diagrama de bode es una representación que sirve para caracterizar la respuesta en frecuencia de un sistema. Normalmente consta de dos graficas separadas, una que corresponde con la magnitud de dicha función y otra que corresponde con la fase. Recibe su nombre del científico que lo desarrollo. Hendrik wade Bode El diseño de un sistema de control por retroalimentación usando las técnicas de bode Involucra la conformación y reconformación de las representaciones de bode para la magnitud y el ángulo de fase hasta que se satisfagan las especificaciones del sistema. Estas especificaciones se expresan convenientemente en término de los factores de mérito en el dominio de la frecuencia, tales como los márgenes de ganancia y de fase durante el comportamiento bajo transitorio y la constante de error para la respuesta al estado estacionario en el dominio del tiempo.
El análisis de los sistemas de control retroalimentación usando el método de bode es equivalente al análisis de Nyquist en cuanto a que las dos técnicas emplean representaciones graficas de GH (jw). Sin embargo, las representaciones de bode consisten en dos graficas: la magnitud de GH (jw) y el ángulo de fase GH (jw); ambas se representan como funciones de la frecuencia w. Generalmente se usan escalas logarítmicas ahora el eje de la frecuencia y para ӀGH (jw)Ӏ.
La representación de la magnitud en dB contra log w se denomina la representación de bode para la magnitud y la representación del ángulo de fase contra log w es la representación de bode para el ángulo de fase.
Las representaciones de bode ilustran claramente la estabilidad relativa de un sistema. En efecto, los márgenes de ganancia y de fase a veces se definen en términos de las representaciones de bode. Estas medidas de estabilidad relativa se pueden determinar para un sistema particular con un mínimo esfuerzo matemático usando representaciones de bode, especialmente para esos casos en que se encuentran disponibles datos experimentales sobre la repuesta de frecuencia.
2

EJERCICIOS.
1) diagrama de Ganancia.
G (s )=10(s+3)
(s+1)(s2+80 s+10000)
G (s )= 10(s+3)(s+1)(s+40−91.6 j)(s+40+91.6 j)
20 log|10|+20 log|√( j ω2+32 )|−20 log|√ ( jω2 )+1|−¿20 log|√ j (ω−91.6 )2+402|−20 log|√ j (ω+91.6 )2+402|¿
ω 20 log|10|20 log|√ (ω2+32 )|−20 log|√ ( jω2+1 )|−20 log|√ (91.6ω¿¿¿2+402)|−20 log|√ (ω+91.6 )+402|total
0.1 20 9.54 -0.04 -39.9 -40 -50.41 20 10 -3 -39.9 -40 -52.910 20 20.37 -20 -39.1 -40.7 -59.43
100 20 40 -40 -32.2 -45.8 -58
Diagrama de Fase.
G (s )=10( s+3 )
(s+1 ) ( s2+80 s+10000 )
G (s )= 10(s+3)(s+1)(s+40−91.6 j)(s+40+91.6 j)
Ωtan−1(ω0 ) tan−1(ω3 ) −tan−1(ω1 ) −tan−1(ω−91.6
40 ) −tan−1(ω−91.640 ) Total
0.1 0 1.9 -5.71 66.38 -66.43 -3.861 0 18.4 -45 66.17 -66.63 -27.06
10 0 73.3 -84.2 63.88 -68.51 -15.53100 0 88.28 -89.4 -11.85 -78.2 -91.17
3
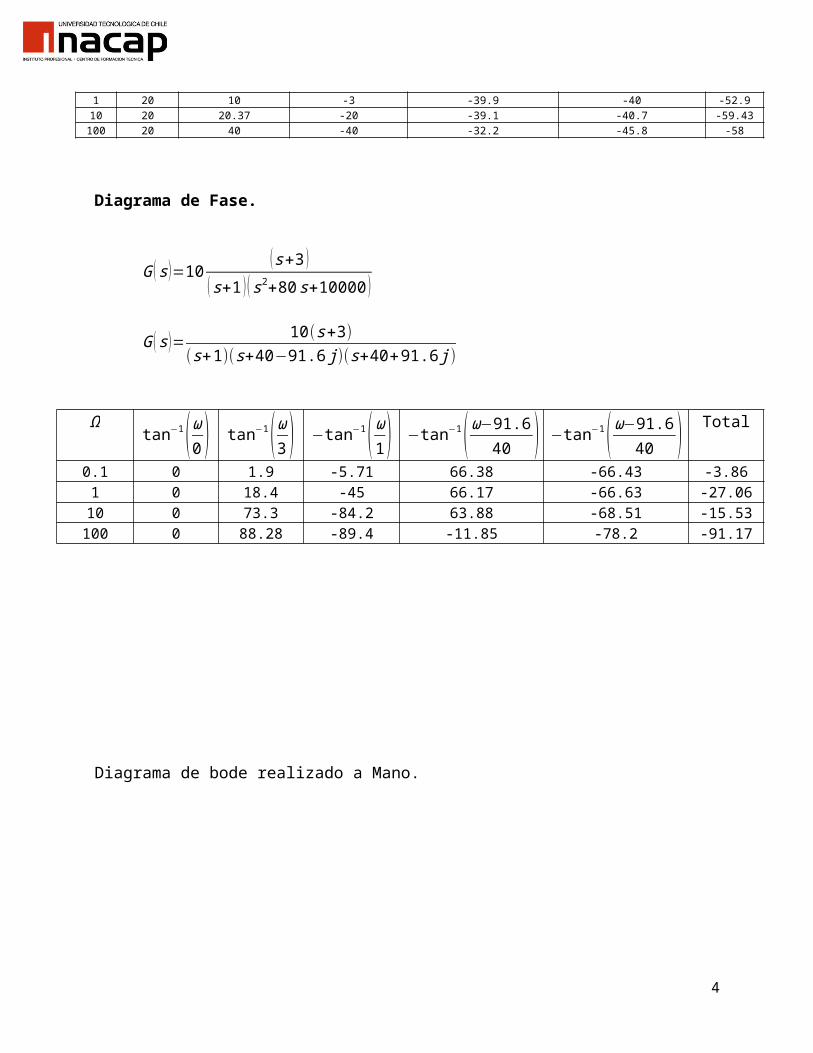
Diagrama de bode realizado a Mano.
4

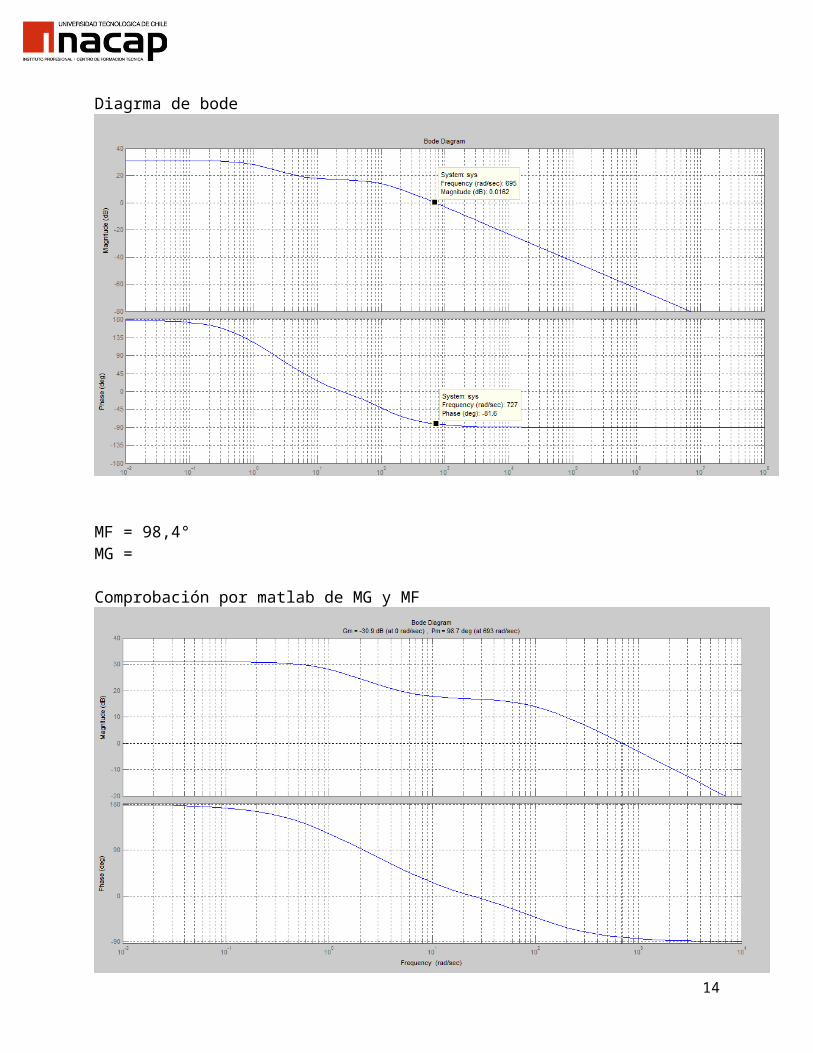
Diagrama de bode
5

MG=MF=
Comprobación por Matlab de MG y MF
2) diagrama de Ganancia
6
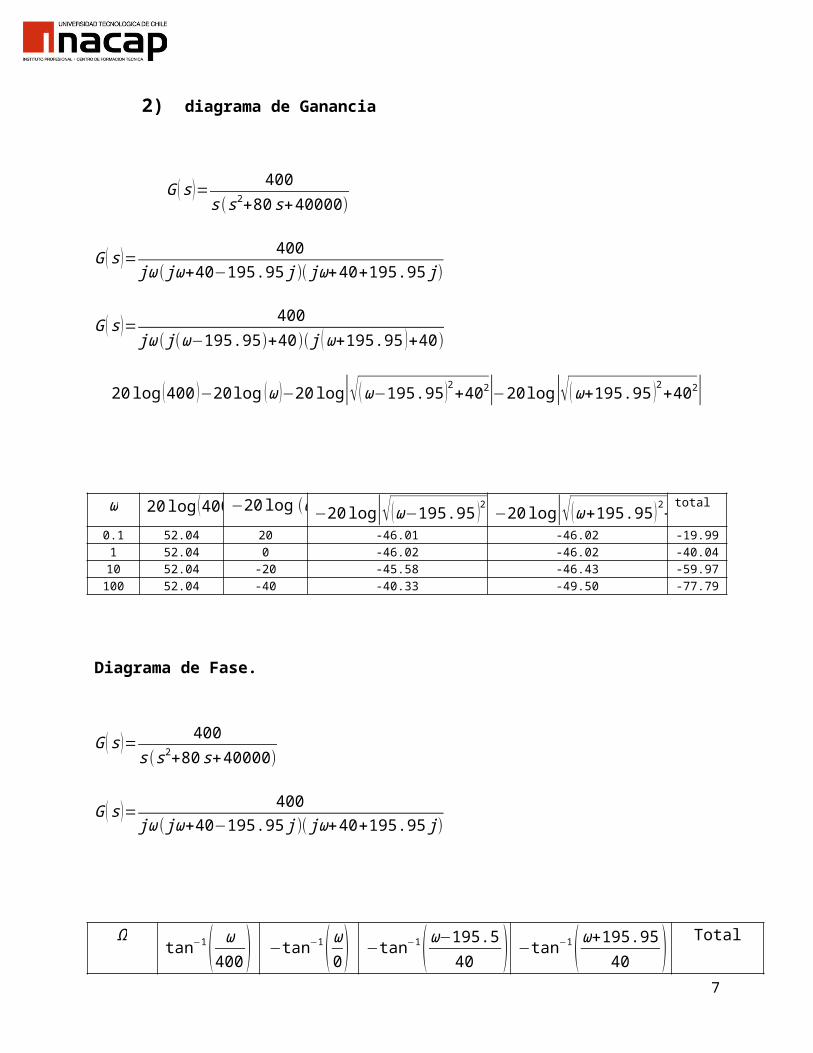
G (s )= 400
s (s2+80 s+40000)
G (s )= 400jω( jω+40−195.95 j)( jω+40+195.95 j)
G (s )= 400jω( j(ω−195.95)+40)( j (ω+195.95 )+40)
20 log (400 )−20 log (ω )−20 log|√ (ω−195.95 )2+402|−20 log|√ (ω+195.95 )2+402|
ω 20 log (400 ) −20 log (ω) −20 log|√ (ω−195.95 )2+402|−20 log|√ (ω+195.95 )2+402|total
0.1 52.04 20 -46.01 -46.02 -19.991 52.04 0 -46.02 -46.02 -40.04
10 52.04 -20 -45.58 -46.43 -59.97100 52.04 -40 -40.33 -49.50 -77.79
Diagrama de Fase.
G (s )= 400
s (s2+80 s+40000)
G (s )= 400jω( jω+40−195.95 j)( jω+40+195.95 j)
Ωtan−1( ω400 ) −tan−1(ω0 ) −tan−1(ω−195.5
40 ) −tan−1(ω+195.9540 ) Total
0.1 0 -90 78.45 -78.46 -901 0 -90 78.40 -78.51 -90
10 0 -90 77.86 -79.008 -91.14100 0 -90 63.36 -82.30 -105.94
Diagrma de bode realizado a Mano.
7

Diagrama de Bode
8

MG = 79,9 dBMF= 90°
Comprobación por matlab de MG y MF
9

3) diagrama de Ganancia
G (s )=700(s+5)
(s+1)(s+100)
G (s )=700(s+5)
s2+10 s+100
G ( jω )=700( jω−s)
( jω+1)( jω+100)
20 log (700 )+20 log|√( jω )2+52|−20 log|√ ( jω )2+12|−20 log|√( jω )2+1002|
ω 20 log (700 ) 20 log|√ ( jω )2+52| −20 log|√ ( jω )2+12| −20 log|√ ( jω )2+1002| total
0.1 56.90 13.98 -0.43 -40 30.831 56.90 14.14 -3.01 -40 28.03
10 56.90 20-96 -20.04 -40.04 17.78100 56.90 40.01 -40.00 -43.01 13.9
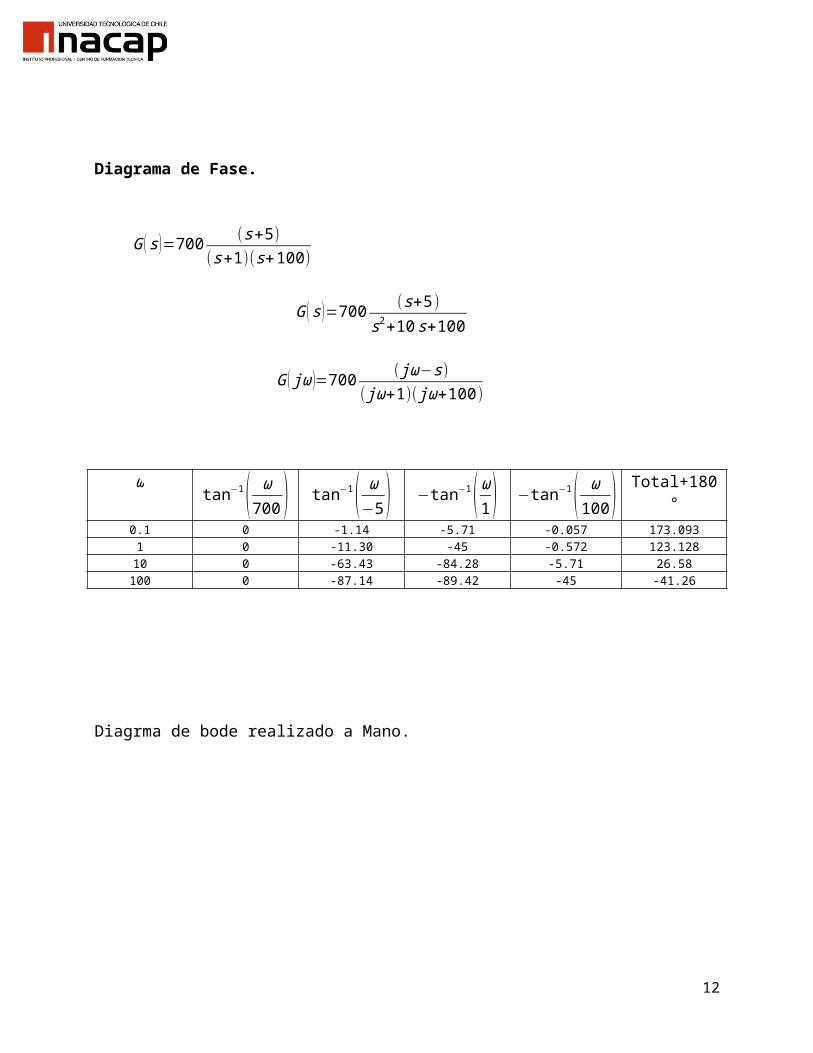
Diagrama de Fase.
G (s )=700(s+5)
(s+1)(s+100)
G (s )=700(s+5)
s2+10 s+100
G ( jω )=700( jω−s)
( jω+1)( jω+100)
ωtan−1( ω700 ) tan−1( ω−5 ) −tan−1(ω1 ) −tan−1( ω100 ) Total+180°
0.1 0 -1.14 -5.71 -0.057 173.0931 0 -11.30 -45 -0.572 123.128
10 0 -63.43 -84.28 -5.71 26.58100 0 -87.14 -89.42 -45 -41.26
10

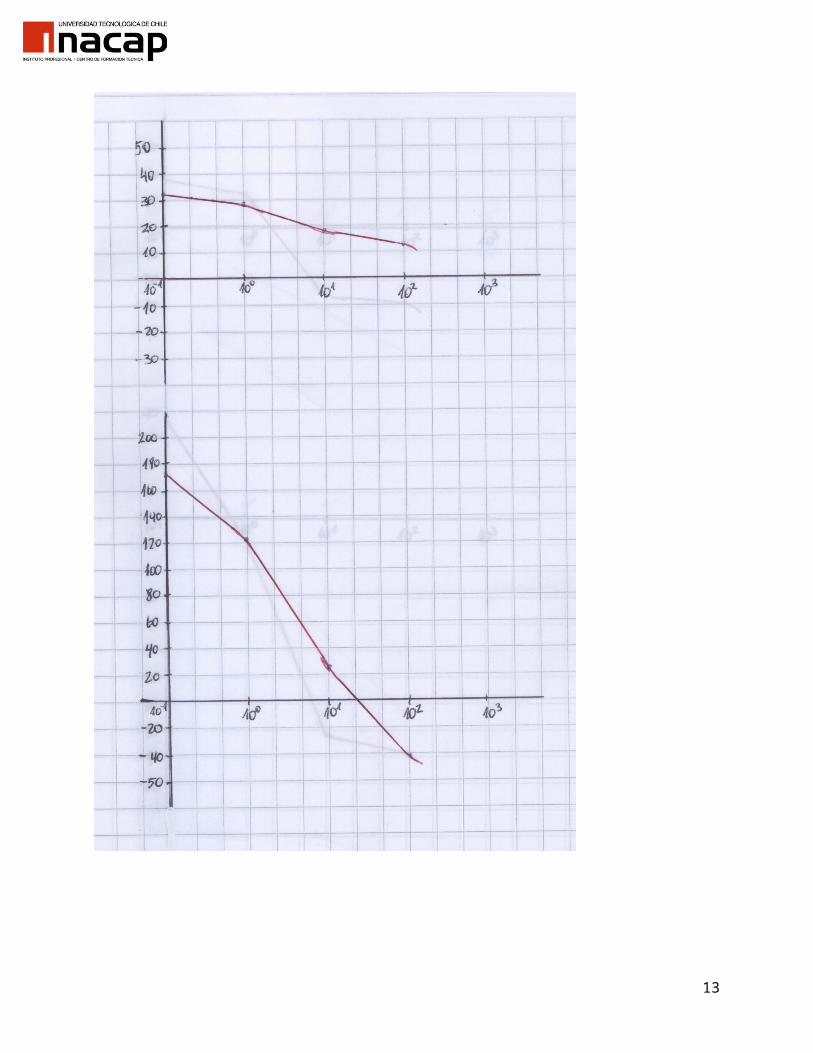
Diagrma de bode realizado a Mano.
11
Diagrma de bode
MF = 98,4°MG =
Comprobación por matlab de MG y MF
12
4) diagrama de Ganancia
G (s )=10e−0,3s
s+1
20 log 10+20 log e−0,3ω−20 log|√ (ω2+12 )|
ω 20 log 10 20 log e−0,3ω−20 log|√ (ω2+12)| Total
0.1 20 -0.26 -0.043 19.691 20 -2.60 -3.01 14.3910 20 -26.05 -20.04 -26.09100 20 -260.5 -40 -280.5
Diagrama de Fase.
G (s )=10e−0,3s
s+1
G ( jω )=10e−0,3ω
ω+1
13
ωtan−1( 0
10 ) W−tan−1(ω1 ) Total
0.1 0 0.1 -5.71 38.431 0 1 -45 -8.47
10 0 10 -84.28 -81.42100 0 100 -89.42 -89
Diagrma de bode realizado a Mano.
14
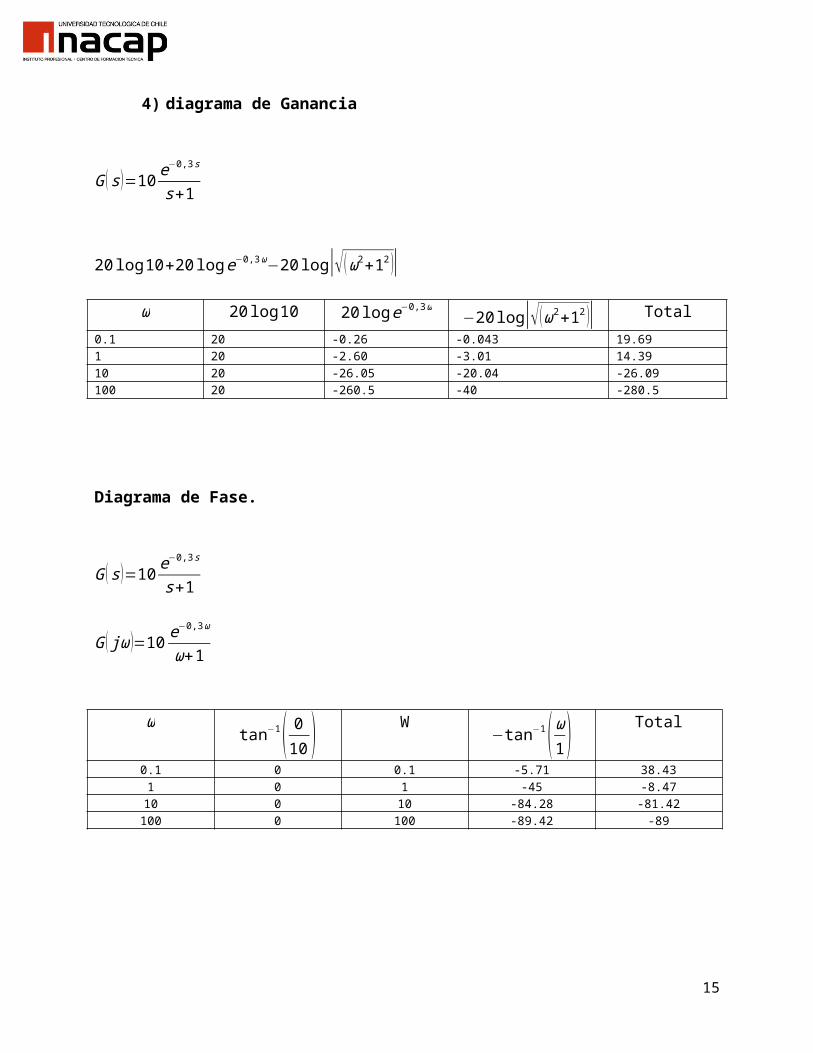
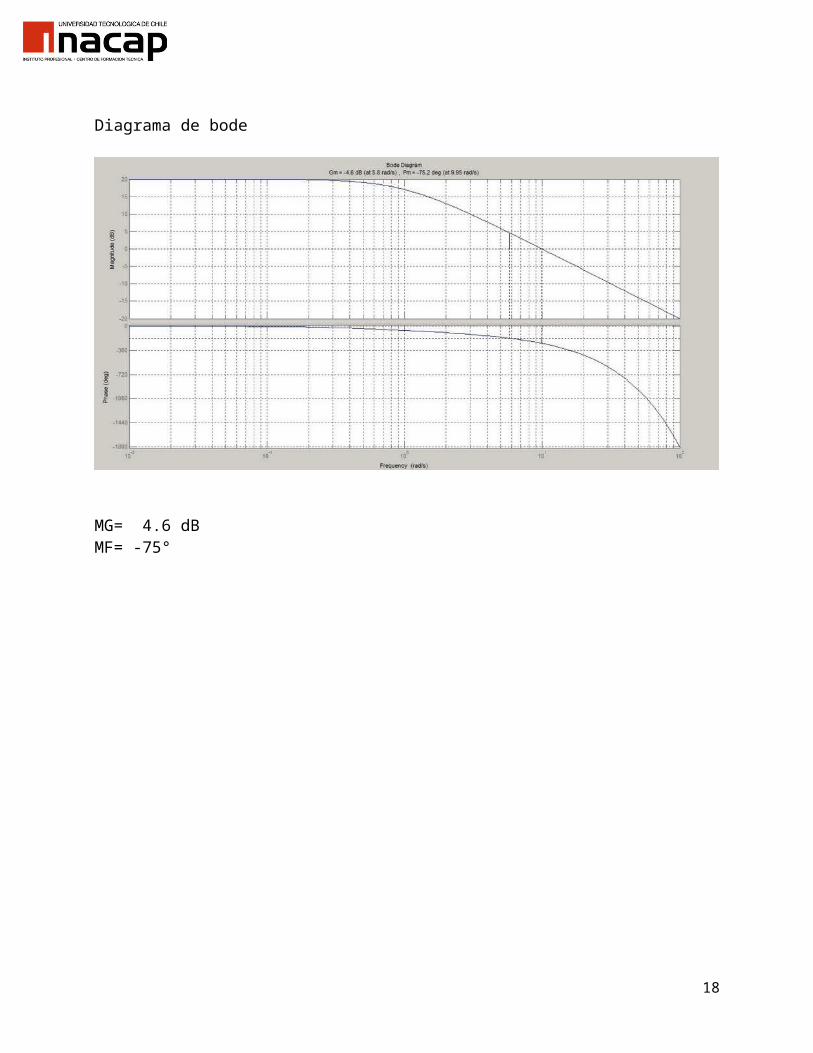
Diagrama de bode
15

MG= 4.6 dBMF= -75°
16

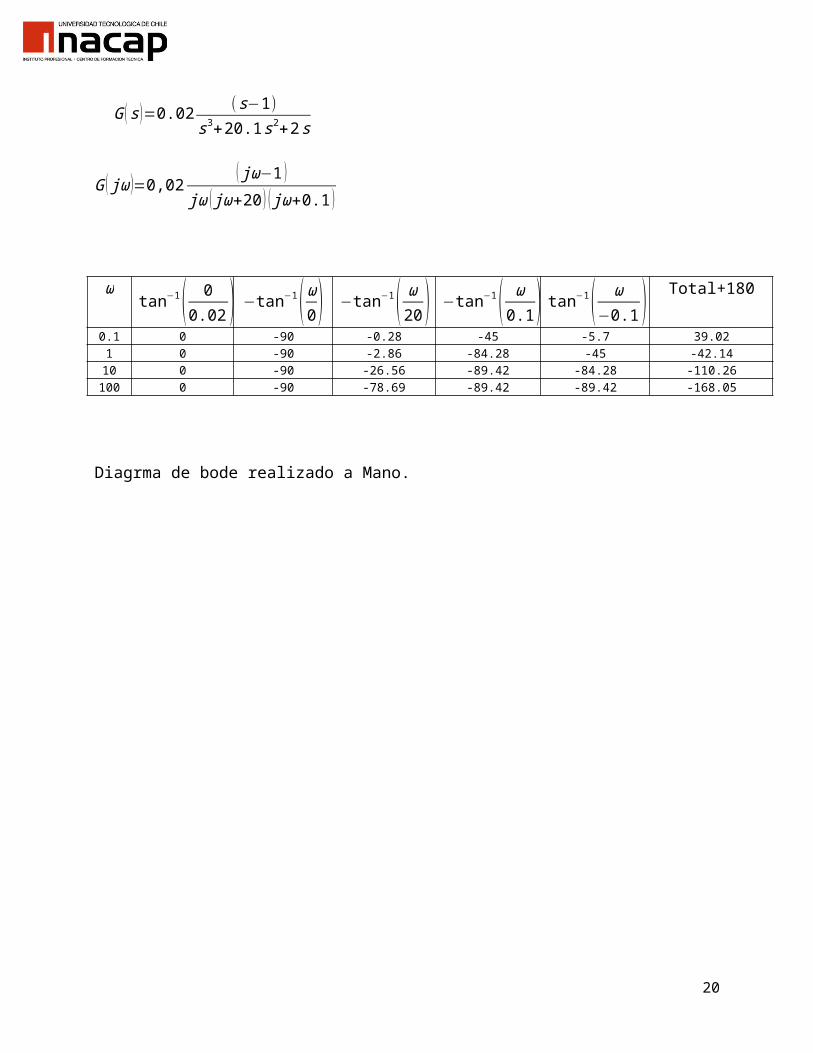
5) Diagrama de Ganancia
G (s )=0.02(s−1)
s (s+20)(s+0.1)
G (s )=0.02(s−1)
s3+20.1 s2+2 s
G ( jω )=0,02( jω−1 )
jω ( jω+20 ) ( jω+0.1 )
20 log(0.02)+20 log|√( jω )2+12|−20 log|ω|−20 log|√ω2+202|−20 log|√ω2+0−12|
ω 20 log (0.02 ) 20 log|√ ( jω )2+12| −20 log|ω| −20 log|√ω2+202| −20 log|√ω2+0.12| total
0.1 -33.97 0.43 20 -26.02 16.98 -22.961 -33.97 3.01 0 -26.03 -0.04 -57.03
10 -33.97 20.04 -20 -26.98 -20 -80.91100 -33.97 40 -40 -40.17 -40 -114.14
Diagrama de Fase.
G (s )=0.02(s−1)
s (s+20)(s+0.1)
G (s )=0.02(s−1)
s3+20.1 s2+2 s
G ( jω )=0,02( jω−1 )
jω ( jω+20 ) ( jω+0.1 )
ωtan−1( 0
0.02 ) −tan−1(ω0 ) −tan−1( ω20 ) −tan−1( ω0.1 ) tan−1( ω−0.1 ) Total+180
0.1 0 -90 -0.28 -45 -5.7 39.021 0 -90 -2.86 -84.28 -45 -42.14
10 0 -90 -26.56 -89.42 -84.28 -110.26100 0 -90 -78.69 -89.42 -89.42 -168.05
17
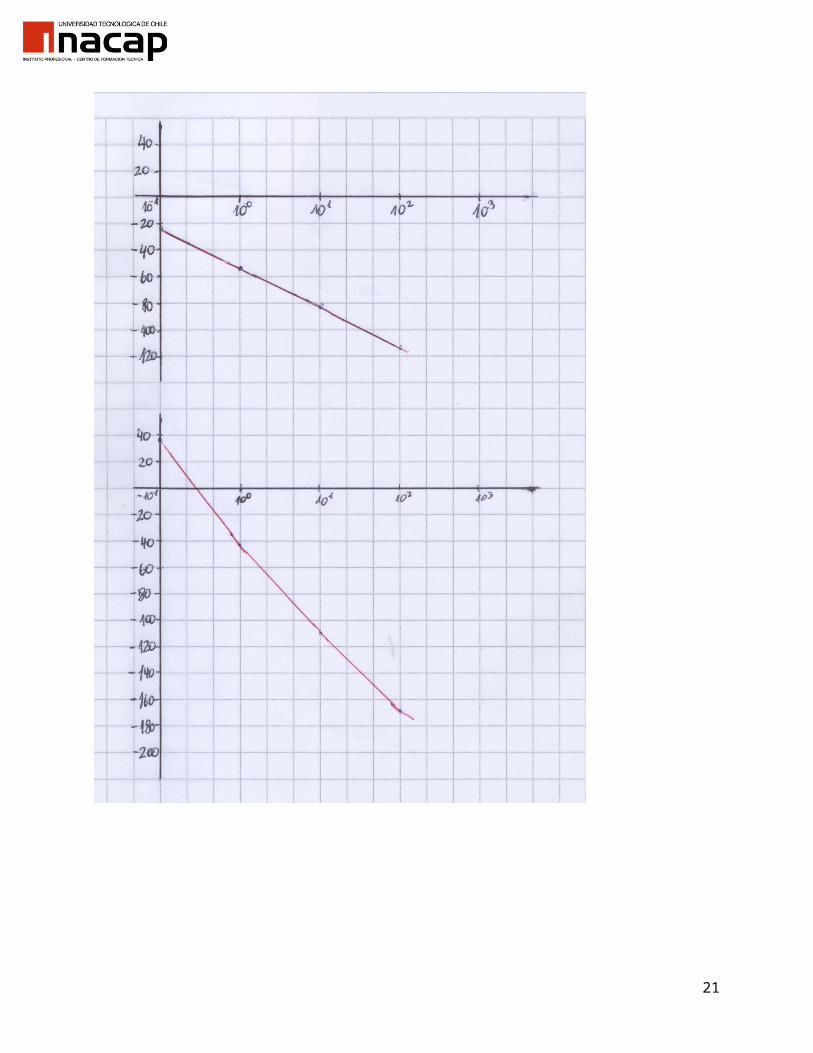
Diagrma de bode realizado a Mano.
18

Diagrama de bode
MF = 264°MG = infinito
Comprobación por medio de Matlab
19
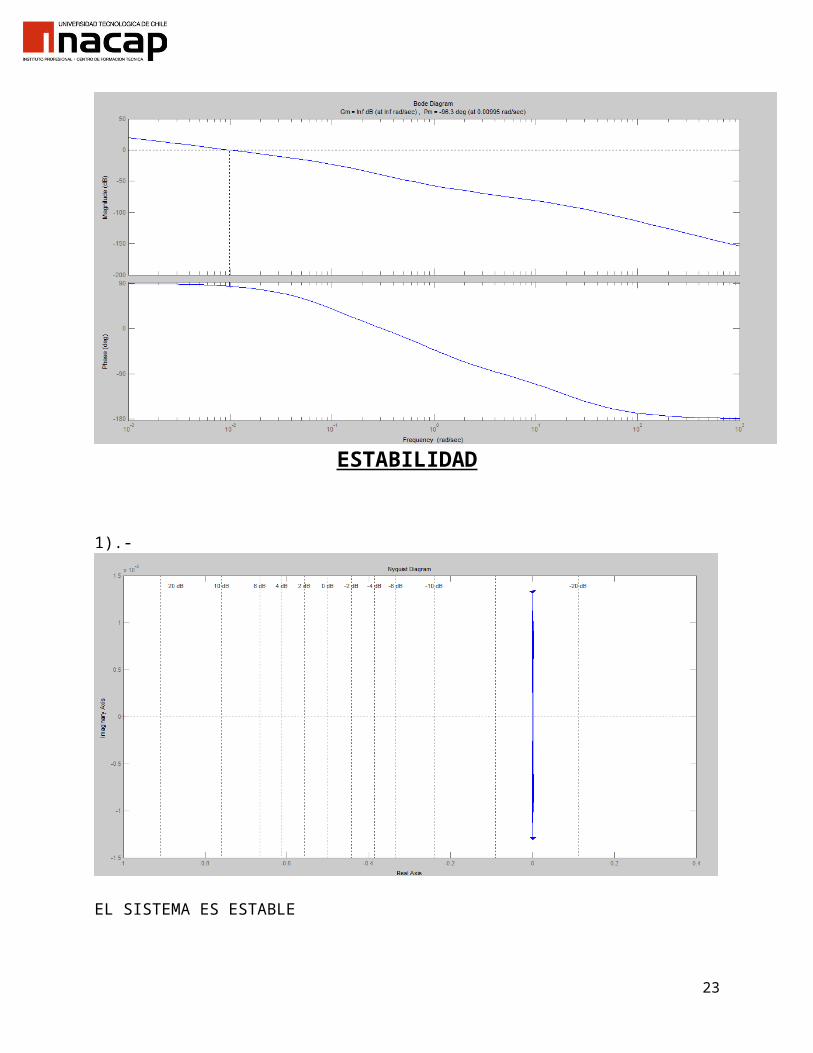
ESTABILIDAD
1).-
EL SISTEMA ES ESTABLE
2).-
EL SISTEMA ES ESTABLE
20
3).-
SISTEMA INESTABLE
4).-
SISTEMA INESTABLE
21

5).-
SISTEMA ESTABLE
22
CONCLUSIÓN
Las trazas de bode ayudan para saber cómo se comporta el sistema. Las trazas de bode simplifican para hallar la magnitud de fase y de ganancia. Las gráficas de matlab ayudan para comprar lo realizado a mano con lo realizado
en el programa en cuanto a bode. Nyquist ayuda a comprender si el sistema se comporta estable o inestable a
basando en el criterio del mismo. Es deseable emplear simultáneamente compensación de atraso y adelanto,
aunque se pueden conectar dos redes en serie para lograr el efector deseado, hay que tener claro que es conveniente realizar el compensador de atraso y adelanto combinado.
La ganancia de Bode es igual a la ganancia D.C. de cualquier función de trasferencia sin polos o ceros en el origen.
Tanto margen de fase como margen de ganancia se definen en términos de respuesta de frecuencia del sistema del lazo abierto.
La respuesta de frecuencia de lazo abierto en la mayoría de sistemas se caracteriza por una alta ganancia en las frecuencias bajas y una ganancia decreciente para las frecuencias más altas, debido al exceso de los polos en comparación con los ceros.
Para algunos casos es posible satisfacer todas las especificaciones del sistema, simplemente ajustando el factor de ganancia de lazo abierto K, pero cuando se trabaja con las representaciones de bode es más conveniente usar la ganancia de bode.
23