sm chapter7
TRANSCRIPT

7Energy of a System
CHAPTER OUTLINE
7.2 Work Done by a Constant Force7.3 The Scalar Product of Two
Vectors7.4 Work Done by a Varying Force7.5 Kinetic Energy and the Work-
Kinetic Energy Theorem7.6 Potential Energy of a System7.7 Conservative and
Nonconservative Forces7.8 Relationship Between Conserva-
tive Forces and Potential Energy7.9 Energy Diagrams and the
Equilibrium of a System
ANSWERS TO QUESTIONS
Q7.1 (a) Positive work is done by the chicken on the dirt.
(b) The person does no work on anything in the environ-ment. Perhaps some extra chemical energy goes through being energy transmitted electrically and is converted into internal energy in his brain; but it would be very hard to quantify “extra.”
(c) Positive work is done on the bucket.
(d) Negative work is done on the bucket.
(e) Negative work is done on the person’s torso.
Q7.2 Force of tension on a ball moving in a circle on the end of a string. Normal force and gravitational force on an object at rest or moving across a level fl oor.
Q7.3 (a) Tension (b) Air resistance (c) The gravitational force does positive work in increasing speed on the downswing. It does negative work in decreasing speed on the upswing.
*Q7.4 Each dot product has magnitude 1⋅1⋅cosθ where θ is the angle between the two factors. Thus for (a) and (f ) we have cos 0 = 1. For (b) and (g), cos 45° = 0.707. For (c) and (h), cos 180° = −1. For (d) and (e), cos 90° = 0. The assembled answer is a = f > b = g > d = e > c = h.
Q7.5 The scalar product of two vectors is positive if the angle between them is between 0 and 90°. The scalar product is negative when 90 180° °< <θ .
*Q7.6 (i) The force of block on spring is equal in magnitude and opposite to the force of spring on block. The answers are (c) and (e).
(ii) The spring tension exerts equal-magnitude forces toward the center of the spring on objects at both ends. The answers are (c) and (e).
Q7.7 ′ =k k2 . To stretch the smaller piece one meter, each coil would have to stretch twice as much as one coil in the original long spring, since there would be half as many coils. Assuming that the spring is ideal, twice the stretch requires twice the force.
Q7.8 No. Kinetic energy is always positive. Mass and squared speed are both positive. A moving object can always do positive work in striking another object and causing it to move along the same direction of motion.
153
13794_07_ch07_p153-174.indd 15313794_07_ch07_p153-174.indd 153 12/2/06 1:46:44 PM12/2/06 1:46:44 PM

Q7.9 Work is only done in accelerating the ball from rest. The work is done over the effective length of the pitcher’s arm—the distance his hand moves through windup and until release. He extends this distance by taking a step forward.
*Q7.10 answer (e). Kinetic energy is proportional to mass.
*Q7.11 answer (a). Kinetic energy is proportional to squared speed. Doubling the speed makes an object’s kinetic energy four times larger.
*Q7.12 It is sometimes true. If the object is a particle initially at rest, the net work done on the object is equal to its fi nal kinetic energy. If the object is not a particle, the work could go into (or come out of) some other form of energy. If the object is initially moving, its initial kinetic energy must be added to the total work to fi nd the fi nal kinetic energy.
*Q7.13 Yes. The fl oor of a rising elevator does work on a passenger. A normal force exerted by a station-ary solid surface does no work.
*Q7.14 answer (c). If the total work on an object is zero in some process, its kinetic energy and so its speed must be the same at the fi nal point as it was at the initial point.
*Q7.15 The cart’s fi xed kinetic energy means that it can do a fi xed amount of work in stopping, namely (6 N)(6 cm) = 0.36 J. The forward force it exerts and the distance it moves in stopping must have this fi xed product. answers: (i) c (ii) a (iii) d
Q7.16 As you ride an express subway train, a backpack at your feet has no kinetic energy as measured by you since, according to you, the backpack is not moving. In the frame of reference of someone on the side of the tracks as the train rolls by, the backpack is moving and has mass, and thus has kinetic energy.
*Q7.17 answer (e). 4 001
20 100 2. .J m= ( )k
Therefore k = 800 N m and to stretch the spring to 0.200 m requires extra work
∆W = ( )( ) − =1
2800 0 200 4 00 12 02. . .J J
Q7.18 (a) Not necessarily. It does if it makes the object’s speed change, but not if it only makes the direction of the velocity change.
(b) Yes, according to Newton’s second law.
*Q7.19 (i) The gravitational acceleration is quite precisely constant at locations separated by much less than the radius of the planet. Answer: a = b = c = d
(ii) The mass but not the elevation affects the gravitational force. Answer: c = d > a = b
(iii) Now think about the product of mass times height. Answer: c > b = d > a
Q7.20 There is no violation. Choose the book as the system. You did work and the Earth did work on the book. The average force you exerted just counterbalanced the weight of the book. The total work on the book is zero, and is equal to its overall change in kinetic energy.
Q7.21 In stirring cake batter and in weightlifting, your body returns to the same conformation after each stroke. During each stroke chemical energy is irreversibly converted into output work (and inter-nal energy). This observation proves that muscular forces are nonconservative.
154 Chapter 7
13794_07_ch07_p153-174.indd 15413794_07_ch07_p153-174.indd 154 12/2/06 1:46:45 PM12/2/06 1:46:45 PM
Energy of a System 155
Q7.22 A graph of potential energy versus position is a straight horizontal line for a particle in neutral equilibrium. The graph represents a constant function.
*Q7.23 (c) The ice cube is in neutral equilibrium. Its zero acceleration is evidence for equilibrium.
*Q7.24 The gravitational energy of the key-Earth system is lowest when the key is on the fl oor letter-side-down. The average height of particles in the key is lowest in that confi guration. As described by F = −dU�dx, a force pushes the key downhill in potential energy toward the bottom of a graph of potential energy versus orientation angle. Friction removes mechanical energy from the key-Earth system, tending to leave the key in its minimum-potential energy confi guration.
Q7.25 Gaspard de Coriolis fi rst stated the work-kinetic energy theorem. Jean Victor Poncelet, an engineer who invaded Russia with Napoleon, is most responsible for demonstrating its wide practical applicability, in his 1829 book Industrial Mechanics. Their work came remarkably late compared to the elucidation of momentum conservation in collisions by Descartes and to Newton’s Mathematical Principles of the Philosophy of Nature, both in the 1600’s.
SOLUTIONS TO PROBLEMS
Section 7.2 Work Done by a Constant Force
P7.1 (a) W F r= = ( )( ) =∆ cos . . cos . .θ 16 0 2 20 25 0 31 9N m J°
(b), (c) The normal force and the weight are both at 90° to the displacement in any time interval. Both do 0 work.
(d) W∑ = + + =31 9 0 0 31 9. .J J
P7.2 (a) W mgh= = ×( )( )( ) = ×− −3 35 10 9 80 100 3 28 105 2. . .J J
(b) Since R mg= , Wair resistance J= − × −3 28 10 2.
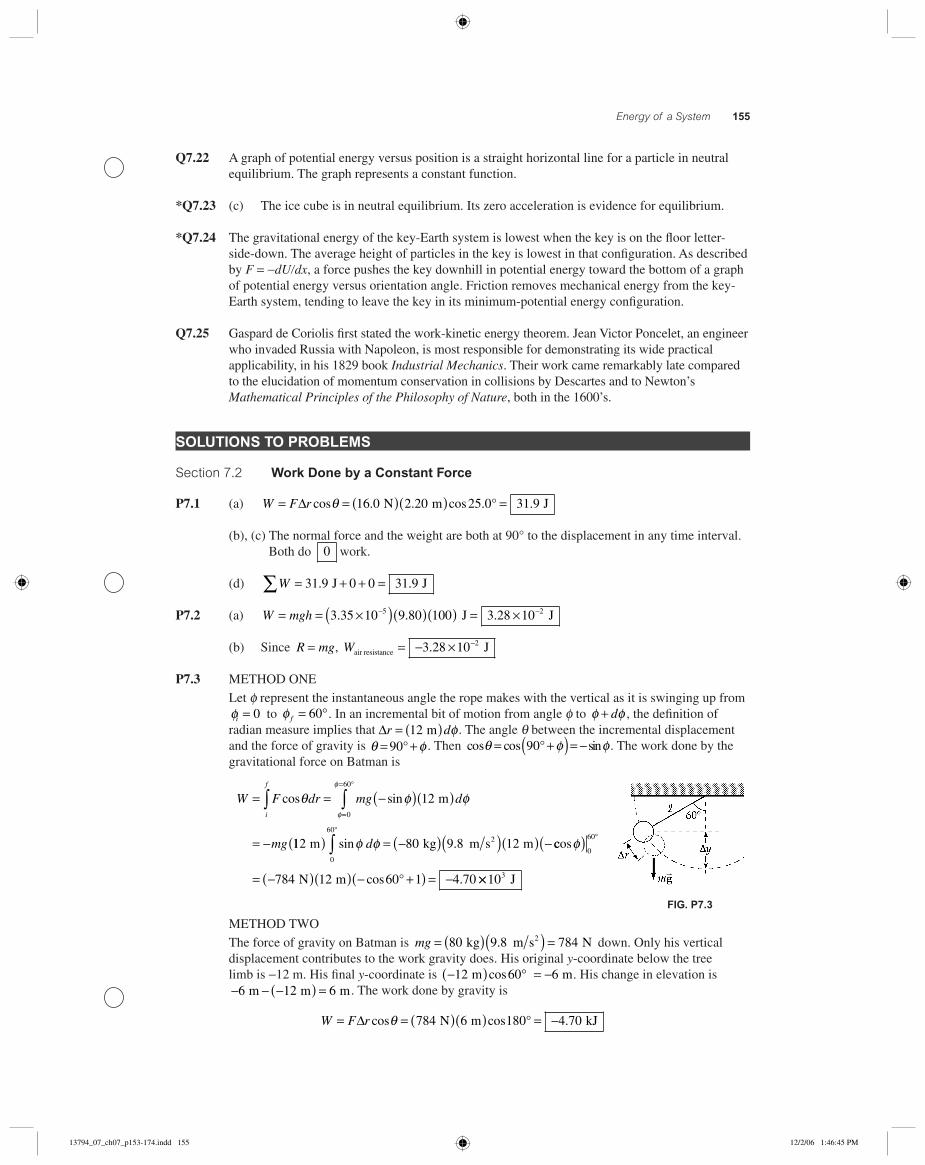
P7.3 METHOD ONE
Let φ represent the instantaneous angle the rope makes with the vertical as it is swinging up from φi = 0 to φ f = °60 . In an incremental bit of motion from angle φ to φ φ+ d , the defi nition of radian measure implies that ∆r d= ( )12 m φ . The angle θ between the incremental displacement and the force of gravity is θ φ= +90° . Then cos cos sinθ φ φ= +( )= −90° . The work done by the gravitational force on Batman is
W F dr mg d
mg
i
f
= = −( )( )
= −
∫ ∫=
=
cos sinθ φ φφ
φ
120
60
m°
112 80 9 8 120
60
m kg m s m2( ) = −( )( )( ) −∫ sin .φ φd°
ccos
cos .
φ( )
= −( )( ) − +( ) = −
°
0
60
784 12 60 1 4 70N m ° ××103 J
METHOD TWO
The force of gravity on Batman is mg = ( )( ) =80 9 8 784kg m s N2. down. Only his vertical displacement contributes to the work gravity does. His original y-coordinate below the tree limb is −12 m. His fi nal y-coordinate is −( ) ° = −12 60 6m mcos . His change in elevation is − − −( ) =6 12 6m m m. The work done by gravity is
W F r= = ( )( ) = −∆ cos cos .θ 784 6 180 4 70N m kJ°
FIG. P7.3
13794_07_ch07_p153-174.indd 15513794_07_ch07_p153-174.indd 155 12/2/06 1:46:45 PM12/2/06 1:46:45 PM
156 Chapter 7
*P7.4 Yes. Object 1 exerts some forward force on object 2 as they move through the same displacement. By Newton’s third law, object 2 exerts an equal-size force in the opposite direction on object 1. In W = F∆r cos θ, the factors F and ∆r are the same, and θ differs by 180°, so object 2 does −15.0 J of work on object 1. The energy transfer is 15 J from object 1 to object 2, which can be counted as a change in energy of −15 J for object 1 and a change in energy of +15 J for object 2.
Section 7.3 The Scalar Product of Two Vectors
P7.5 � �A B i j k i j k⋅ = + +( )⋅ + +( )A A A B B Bx y z x y z
ˆ ˆ ˆ ˆ ˆ ˆ
� �A B i i i j i k⋅ = ⋅( ) + ⋅( ) + ⋅( )
+
A B A B A B
A
x x x y x zˆ ˆ ˆ ˆ ˆ ˆ
yy x y y y z
z x
B A B A B
A B
ˆ ˆ ˆ ˆ ˆ ˆ
ˆ
j i j j j k
k
⋅( ) + ⋅( ) + ⋅( )+ ⋅ ˆ ˆ ˆ ˆ ˆi k j k k
A B
( ) + ⋅( ) + ⋅( )⋅ = +
A B A B
A B A B
z y z z
x x y
� �yy z zA B+
P7.6 A = 5 00. ; B = 9 00. ; θ = °50 0.
� �A B⋅ = = ( )( ) =AB cos . . cos . .θ 5 00 9 00 50 0 28 9°
P7.7 (a) W F x F yx y= ⋅ = + = ( )( ) ⋅ + −( )� �F r∆ 6 00 3 00 2 00 1. . . .N m 000 16 0( ) ⋅ =N m J.
(b) θ = ⋅⎛⎝⎜
⎞⎠⎟
=( ) + −
− −cos cos. .
1 1
2
16
6 00 2 00
� �F r∆
∆F r (( )( ) ( ) + ( )( )= °
2 2 23 00 1 0036 9
. ..
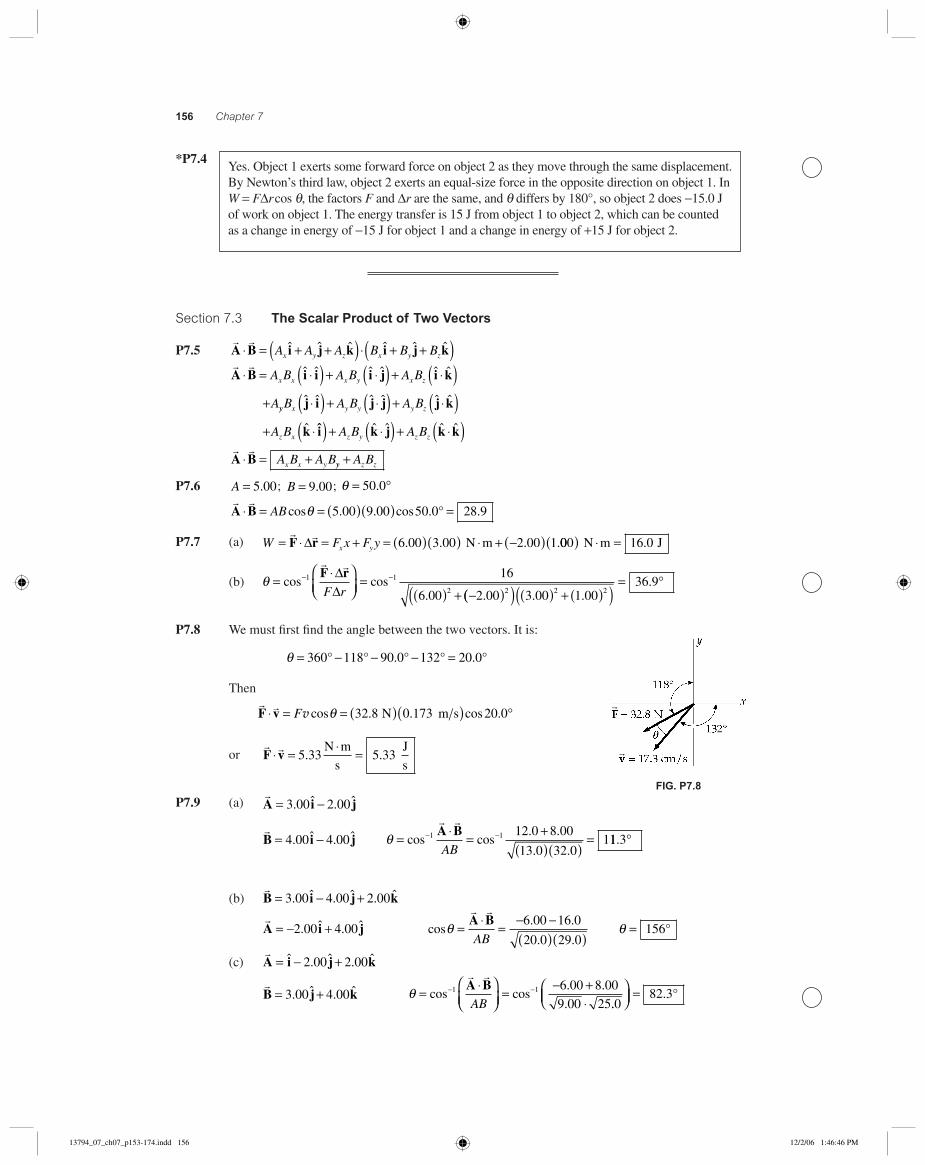
P7.8 We must fi rst fi nd the angle between the two vectors. It is:
θ = − − − =360 118 90 0 132 20 0° ° ° ° °. .
Then� �F v⋅ = = ( )( ) °Fv cos . . cos .θ 32 8 0 173 20 0N m s
or � �F v⋅ = ⋅ =5 33 5 33. .
N m
s
J
s
P7.9 (a) �A i j= −3 00 2 00. ˆ . ˆ
�B i j= −4 00 4 00. ˆ . ˆ θ = ⋅ = +
( )( )=− −cos cos
. .
. .1 1 12 0 8 00
13 0 32 01
� �A BAB
11 3. °
(b) �B i j k= − +3 00 4 00 2 00. ˆ . ˆ . ˆ
�A i j= − +2 00 4 00. ˆ . ˆ cos
. .
. .θ = ⋅ = − −
( )( )
� �A BAB
6 00 16 0
20 0 29 0 θ = 156°
(c) �A i j k= − +ˆ . ˆ . ˆ2 00 2 00
�B j k= +3 00 4 00. ˆ . ˆ θ = ⋅⎛
⎝⎜⎞⎠⎟
= − +⋅
− −cos cos. .
.1 1 6 00 8 00
9 00 25
� �A BAB ..
.0
82 3⎛⎝⎜
⎞⎠⎟ = °
FIG. P7.8
13794_07_ch07_p153-174.indd 15613794_07_ch07_p153-174.indd 156 12/2/06 1:46:46 PM12/2/06 1:46:46 PM

Energy of a System 157
P7.10 � �A B i j k i j k− = + −( ) − − + +( )3 00 2 00 5 00. ˆ ˆ ˆ ˆ . ˆ . ˆ
� �
� � �A B i j k
C A B j
− = − −
⋅ −( ) = −
4 00 6 00
2 00 3 0
. ˆ ˆ . ˆ
. ˆ . 00 4 00 6 00 0 2 00 18 0ˆ . ˆ ˆ . ˆ . .k i j k( ) ⋅ − −( ) = + −( ) + +( ) == 16 0.
*P7.11 Let θ represent the angle between �A and
�B. Turning by 25° makes the dot product larger, so the
angle between �C and
�B must be smaller. We call it θ − 25°. Then we have
A 5 cos θ = 30 and A 5 cos (θ − 25°) = 35
Then A cos θ = 6 and A (cos θ cos 25° + sin θ sin 25°) = 7
Dividing, cos 25° + tan θ sin 25° = 7�6 tan θ = (7�6 − cos 25°)�sin 25° = 0.616
θ = 31.6°. Then the direction angle of A is 60° − 31.6° = 28.4°
Substituting back, A cos 31.6° = 6 so �A = 7.05 m at 28.4°
Section 7.4 Work Done by a Varying Force
P7.12 F xx = −( )8 16 N
(a) See fi gure to the right
(b) Wnet
m N m N= −( )( )+ ( )( )
= −2 00 16 0
2
1 00 8 00
2
. . . .112 0. J
P7.13 W Fdxi
f
= =∫ area under curve from xi to x f
(a) xi = 0 x f = 8 00. m
W = area of triangle ABC AC= ⎛⎝
⎞⎠ ×1
2 altitude,
W0 8
1
28 00 6 00 24 0→ = ⎛
⎝⎞⎠ × × =. . .m N J
(b) xi = 8 00. m x f = 10 0. m
W = area of ∆CDE CE= ⎛⎝
⎞⎠ ×1
2 altitude,
W8 10
1
22 00 3 00 3 00→ = ⎛
⎝⎞⎠ × ( ) × −( ) = −. . .m N J
(c) W W W0 10 0 8 8 10 24 0 3 00 21 0→ → →= + = + −( ) =. . . J
P7.14 W d x y dxi
f
= ⋅ = +( ) ⋅∫ ∫� �F r i j i4 3
0
5
ˆ ˆ ˆNm
4 0 4
250 0
0
5 2
0
5
N m N m Jm m
( ) + = ( ) =∫ xdxx
.
FIG. P7.12
0
0
0
0
FIG. P7.13
13794_07_ch07_p153-174.indd 15713794_07_ch07_p153-174.indd 157 12/2/06 1:46:47 PM12/2/06 1:46:47 PM

158 Chapter 7
P7.15 W F dxx= ∫ and W equals the area under the Force-Displacement curve
(a) For the region 0 5 00≤ ≤x . m,
W = ( )( )=3 00 5 00
27 50
. ..
N mJ
(b) For the region 5 00 10 0. .≤ ≤x ,
W = ( )( ) =3 00 5 00 15 0. . .N m J
(c) For the region 10 0 15 0. .≤ ≤x ,
W = ( )( )=3 00 5 00
27 50
. ..
N mJ
(d) For the region 0 15 0≤ ≤x .
W = + +( ) =7 50 7 50 15 0 30 0. . . .J J
P7.16 (a) Spring constant is given by F kx=
kF
x= = ( )
( ) =230
0 400575
N
mN m
.
(b) Work = = ( )( ) =F xavg N m J1
2230 0 400 46 0. .
P7.17 kF
y
Mg
y= = = ( )( )
×= ×−
4 00 9 80
2 50 101 57 102
3. .
..
N
mN m
(a) For 1.50 kg mass ymg
k= = ( )( )
×=1 50 9 80
1 57 100 9383
. .
.. cm
(b) Work = 1
22ky
Work = × ⋅( ) ×( ) =−1
21 57 10 4 00 10 1 253 2 2. . .N m m J
*P7.18 In F = −kx, F refers to the size of the force that the spring exerts on each end. It pulls down on the doorframe in part (a) in just as real a sense at it pulls on the second person in part (b).
(a) Consider the upward force exerted by the bottom end of the spring, which undergoes a downward displacement that we count as negative:
k = −F�x = −(7.5 kg)(9.8 m�s2)�(−0.415 m + 0.35 m) = −73.5 N�(−0.065 m) = 1.13 kN�m
(b) Consider the end of the spring on the right, which exerts a force to the left:
x = −F�k = −(−190 N)�(1130 N�m) = 0.168 m
The length of the spring is then 0.35 m + 0.168 m = 0.518 m
*P7.19 ΣF max x= : kx ma=
kma
x= = ×
×
−(4.70 10 kg)0.800(9.80 m s )
0.500 10
3 2
−−
=
2m
N m7 37.
FIG. P7.19
FIG. P7.15
13794_07_ch07_p153-174.indd 15813794_07_ch07_p153-174.indd 158 12/2/06 1:46:48 PM12/2/06 1:46:48 PM

Energy of a System 159
*P7.20 The spring exerts on each block an outward force of magnitude
F kxs = = ( )( ) =3 85 0 08 0 308. . .N m m N
Take the +x direction to the right. For the light block on the left, the vertical forces are given by F mgg = = ( )( ) =0 25 9 8 2 45. . .kg m s N2 , Fy∑ = 0,
n − =2 45 0. N , n = 2 45. N. Similarly for the heavier block
n Fg= = ( )( ) =0 5 9 8 4 9. . .kg m s N2
(a) For the block on the left, F max x∑ = , − = ( )0 308 0 25. .N kg a , a = −1 23. m s2 .
For the heavier block, + = ( )0 308 0 5. .N kg a , a = 0 616. m s2 .
(b) For the block on the left, f nk k= = ( ) =µ 0 1 2 45 0 245. . .N N
F ma
a
a
x x∑ =
− + = ( )= −
0 308 0 245 0 25
0 25
. . .
.
m s N kg2
22 m s if the force of static friction is n2 oot too large.
For the block on the right, f nk k= =µ 0 490. N . The maximum force of static friction
would be larger, so no motion would begin and the acceleration is zero .
(c) Left block: fk = ( ) =0 462 2 45 1 13. . .N N. The maximum static friction force would be larger, so the spring force would produce no motion of this block or of the right-hand block,
which could feel even more friction force. For both a = 0 .
*P7.21 Compare an initial picture of the rolling car with a fi nal picture with both springs compressed K W Ki f+ =∑ . Work by both springs changes the car’s kinetic energy
K k x x k x x K
m
i i f i f f
i
+ −( )+ −( ) =1
2
1
21
2
1 12
12
2 22
22
2v ++ − ( )( )+ − ( )
01
21600 0 500
01
23400 0 20
2N m m
N m
.
. 00 0
1
26 000 200
2 2
2
2
m
kg J 68.0 J 0
( ) =
( ) − − =
=
v
v
i
i
668
6 0000 299
J
kgm s
( )= .
P7.22 (a) W d
W x x
i
f
= ⋅
= + −(
∫� �F r
15 000 10 000 25 000 2N N m N m2 )) °
= + −
∫ dx
W xx x
cos.
0
15 00010 000
2
25 000
0
0 600
2 3
m
33
9 00 1 80 1 80 9 00
0
0 600.
. . . .
m
kJ kJ kJ kJW = + − =
FIG. P7.20
2.45 N
n
Fs
FIG. P7.21
( )NF
continued on next page
13794_07_ch07_p153-174.indd 15913794_07_ch07_p153-174.indd 159 12/2/06 1:46:49 PM12/2/06 1:46:49 PM

160 Chapter 7
(b) Similarly,
W = ( )( ) +( )( )
−15 0 1 0010 0 1 00
2
252
. .. .
kN mkN m m .. .
.
0 1 00
3
11 7
3kN m m
kJ , larger by 29
2( )( )
=W ..6%
P7.23 The same force makes both light springs stretch.
(a) The hanging mass moves down by
x x xmg
k
mg
kmg
k k= + = + = +
⎛⎝⎜
⎞⎠⎟
=
1 21 2 1 2
1 1
1 5. kg 9.88 m sm
N
m
1800 Nm2 1
1 200
12 04 10 2+
⎛⎝⎜
⎞⎠⎟
= × −.
(b) We defi ne the effective spring constant as
kF
x
mg
mg k k k k= =
+( ) = +⎛⎝⎜
⎞⎠⎟
=
−
1 1
1 1
1
1 2 1 2
1
m
1 200 NN
m
1800 NN m+
⎛⎝⎜
⎞⎠⎟
=−
1720
1
P7.24 See the solution to problem 7.23.
(a) x mgk k
= +⎛⎝⎜
⎞⎠⎟
1 1
1 2
Both springs stretch, so the load moves down by a larger amount than
it would if either spring were missing.
(b) kk k
= +⎛⎝⎜
⎞⎠⎟
−1 1
1 2
1
The spring constant of the series combination is less than the smaller of
the two individual spring constants, to describe a less stiff system, that stretches by a larger extension for any particular load.
P7.25 (a) The radius to the object makes angle θ with the horizontal, so its weight makes angle θ with the negative side of the x-axis, when we take the x-axis in the direction of motion tangent to the cylinder.
F ma
F mg
F mg
x x∑ =
− =
=
cos
cos
θ
θ
0
(b) W di
f
= ⋅∫� �F r
We use radian measure to express the next bit of displacement as dr Rd= θ in terms of the next bit of angle moved through:
W mg Rd mgR
W mgR mgR
= =
= −( ) =
∫ cos sinθ θ θπ
π
0
2
0
2
1 0
P7.26 kF
x[ ] = ⎡
⎣⎢⎤⎦⎥
= = ⋅ =N
m
kg m s
m
kg
s
2
2
FIG. P7.25
mg
13794_07_ch07_p153-174.indd 16013794_07_ch07_p153-174.indd 160 12/2/06 1:46:51 PM12/2/06 1:46:51 PM
Energy of a System 161
*P7.27 We can write u as a function of v : (8 N −[−2 N])�(25 cm − 5 cm) = (u −[−2 N])�(v − 5 cm)
(0.5 N�cm)(v − 5 cm) = u + 2 N u = (0.5 N�cm)v − 4.5 N also v = (2 cm�N)u + 9 cm
(a) Then
ud da
bv v v v v= −( ) = −⎡⎣ ⎤⎦∫∫ 0 5 4 5 0 5 2 4 52
5
25
5
25
. . . / . == −( ) − −( )0 25 625 25 4 5 25 5. .
= − = ⋅ =150 90 60 0 600N cm J.
(b) Reversing the limits of integration just gives us the negative of the quantity: udb
av = −∫ 0 600. J
(c) This is an entirely different integral. It is larger because all of the area to be counted up is positive (to the right of v = 0) instead of partly negative (below u = 0).
vdu u du u ua
b= +( ) = +⎡⎣ ⎤⎦ = − −( )
− −∫∫ 2 9 2 2 9 64 22
2
8
2
8
/ 22 9 8 2 60 90 150 1 50+ +( ) = + = ⋅ =N cm J.
*P7.28 If the weight of the fi rst tray stretches all four springs by a distance equal to the thickness of the tray, then the proportionality expressed by Hooke’s law guarantees that each additional tray will have the same effect, so that the top surface of the top tray will always have the same elevation above the fl oor.
The weight of a tray is 0 580 9 8 5 68. . .kg m s N2( ) = . The force 1
45 68 1 42. .N N( ) = should
stretch one spring by 0.450 cm, so its spring constant is kF
xs= = =1 42
316. N
0.004 5 mN m .
We did not need to know the length or width of the tray.
Section 7.5 Kinetic Energy and the Work-Kinetic Energy Theorem
P7.29 (a) KA = ( )( ) =1
20 600 2 00 1 20
2. . .kg m s J
(b) 1
22m KB Bv = : vB
BK
m= = ( )( )
=2 2 7 50
0 6005 00
.
.. m s
(c) W K K K mB A B A∑ = = − = −( ) = − =∆ 1
27 50 1 20 6 302 2v v . . .J J J
P7.30 (a) K m= = ( )( ) =1
2
1
20 300 15 0 33 82 2v . . .kg m s J
(b) K = ( )( ) = ( )( ) ( ) =1
20 300 30 0
1
20 300 15 0 4 4 332 2. . . . .88 135( ) = J
P7.31 �v i ji = −( ) =6 00 2 00. ˆ . ˆ m s
(a) v v vi ix iy= + =2 2 40 0. m s
K mi i= = ( )( ) =1
2
1
23 00 40 0 60 02v . . .kg m s J2 2
(b) �v i jf = +8 00 4 00. ˆ . ˆ
v f f f2 64 0 16 0 80 0= ⋅ = + =� �
v v . . . m s2 2
∆K K K mf i f i= − = −( ) = ( ) − =1
2
3 00
280 0 60 0 60 02 2v v
.. . . J
13794_07_ch07_p153-174.indd 16113794_07_ch07_p153-174.indd 161 12/2/06 1:46:51 PM12/2/06 1:46:51 PM

162 Chapter 7
P7.32 (a) ∆K K K m Wf i f= − = − = =∑1
202v (area under curve from x = 0 to x = 5 00. m)
v f m= ( )
= ( )=2 2 7 50
4 001 94
area J
kgm s
.
..
(b) ∆K K K m Wf i f= − = − = =∑1
202v (area under curve from x = 0 to x = 10 0. m)
v f m= ( )
= ( )=2 2 22 5
4 003 35
area J
kgm s
.
..
(c) ∆K K K m Wf i f= − = − = =∑1
202v (area under curve from x = 0 to x = 15 0. m)
v f m= ( )
= ( )=2 2 30 0
4 003 87
area J
kgm s
.
..
P7.33 Consider the work done on the pile driver from the time it starts from rest until it comes to rest at the end of the fall. Let d = 5.00 m represent the distance over which the driver falls freely, and h = 0 12. m the distance it moves the piling.
W K∑ = ∆ : W W m mf igravity beam+ = −1
2
1
22 2v v
so
mg h d F d( ) +( ) + ( )( ) = −cos cos0 180 0 0° °
Thus,
Fmg h d
d=
( ) +( )=
( )( )( )2 100 9 80 5 12
0 1
kg m s m2. .
. 2208 78 105
mN= ×.
The force on the pile driver is upward .
*P7.34 (a) We evaluate the kinetic energy of the cart and the work the cart would have to do to plow all the way through the pile. If the kinetic energy is larger, the cart gets through.
K = (1�2)mv2 = (1�2)(0.3 kg)(0.6 m �s)2 = 0.054 J
The work done on the cart in traveling the whole distance is the net area under the graph,
W = (2 N) (0.01 m) + [(0 − 3 N)�2](0.04 m) = 0.02 J − 0.06 J = −0.04 J
The work the cart must do is less than the original kinetic energy, so the cart does get through all the sand.
(b) The work the cart does is +0.04 J, so its fi nal kinetic energy is the remaining 0.054 J − 0.04 J = 0.014 J. Another way to say it: from the work-kinetic energy theorem,
Ki + W = K
f 0.054 J – 0.04 J = 0.014 J = (1�2)(0.5 kg)v
f2
vf = [2(0.014 kg⋅m2�s2)�(0.3 kg)]1�2 = 0.306 m� s
*P7.35 (a) K W K mi f f+ = =∑ 1
22v
01
215 0 10 780 4 563 2+ = ×( )( ) =∑ −W . .kg m s kJ
(b) FW
r= = ×
( ) °=
∆ cos
.
cos.
θ4 56 10
06 34
3 J
0.720 mkN
continued on next page
13794_07_ch07_p153-174.indd 16213794_07_ch07_p153-174.indd 162 12/2/06 1:46:52 PM12/2/06 1:46:52 PM

Energy of a System 163
(c) ax
f i
f
=−
=( ) −
( ) =v v2 2 2
2
780 0
2 0 720422
m s
mkm s2
.
(d) F ma∑ = = ×( ) ×( ) =−15 10 422 10 6 343 3kg m s kN2 .
(e) The forces are the same. The two theories agree.
P7.36 (a) v f = ×( ) = ×0 096 3 10 2 88 108 7. .m s m s
K mf f= = ×( ) ×( ) =−1
2
1
29 11 10 2 88 10 32 31 7 2
v . .kg m s ..78 10 16× − J
(b) K W Ki f+ = : 0 + =F r K f∆ cosθ
F 0 028 0 3 78 10 16. cos .m J( ) ° = × −
F = × −1 35 10 14. N
(c) F ma∑ = ; aF
m= = ×
×= ×∑ −
−+1 35 10
9 11 101 48 10
14
3116.
..
N
kgmm s2
(d) v vxf xi xa t= + 2 88 10 0 1 48 107 16. .× = + ×( )m s m s2 t
t = × −1 94 10 9. s
Check: x x tf i xi xf= + +( )1
2v v
0 028 01
20 2 88 107. .m m s= + + ×( )t
t = × −1 94 10 9. s
Section 7.6 Potential Energy of a System
P7.37 (a) With our choice for the zero level for potential energy when the car is at point B,
UB = 0
When the car is at point A, the potential energy of the car-Earth system is given by
U mgyA =
where y is the vertical height above zero level. With 135 ft = 41.1 m, this height is found as:y = ( ) ° =41 1 40 0 26 4. sin . .m m
Thus,
UA2kg m s m J= ( )( )( ) = ×1 000 9 80 26 4 2 59 105. . .
The change in potential energy as the car moves from A to B is
U UB A J J− = − × = − ×0 2 59 10 2 59 105 5. .
FIG. P7.37
continued on next page
13794_07_ch07_p153-174.indd 16313794_07_ch07_p153-174.indd 163 12/2/06 1:46:53 PM12/2/06 1:46:53 PM

164 Chapter 7
(b) With our choice of the zero level when the car is at point A, we have UA = 0 . The
potential energy when the car is at point B is given by U mgyB = where y is the vertical distance of point B below point A. In part (a), we found the magnitude of this distance to be 26.5 m. Because this distance is now below the zero reference level, it is a negative number.
Thus,
UB2kg m s m J= ( )( ) −( ) = − ×1 000 9 80 26 5 2 59 105. . .
The change in potential energy when the car moves from A to B is
U UB A J J− = − × − = − ×2 59 10 0 2 59 105 5. .
P7.38 (a) We take the zero confi guration of system potential energy with the child at the lowest point of the arc. When the string is held horizontal initially, the initial position is 2.00 m above the zero level. Thus,
U mgyg = = ( )( ) =400 2 00 800N m J.
(b) From the sketch, we see that at an angle of 30.0° the child is at a vertical height of
2 00 1 30 0. cos .m( ) −( )° above the lowest point of the arc. Thus,
U mgyg = = ( )( ) −( ) =400 2 00 1 30 0 107N m J. cos . °
(c) The zero level has been selected at the lowest point of the arc. Therefore, Ug = 0 at this location.
Section 7.7 Conservative and Nonconservative Forces
P7.39 F mgg = = ( )( ) =4 00 9 80 39 2. . .kg m s N2
(a) Work along OAC = work along OA + work along AC = ( ) ° + ( ) °
= ( )F Fg gOA AC
N
cos . cos
. .
90 0 180
39 2 5 00 mm N m
J
( ) + ( )( ) −( )= −
39 2 5 00 1
196
. .
(b) W along OBC = W along OB + W along BC
= ( )( ) + ( )( )39 2 5 00 180 39 2 5 00. . cos . . coN m N m° ss .90 0
196
°
= − J
(c) Work along OC = ( ) °Fg OC cos135
= ( ) ×( ) −⎛⎝⎜
⎞⎠⎟ = −39 2 5 00 2
1
2196. .N m J
The results should all be the same, since gravitational forces are conservative.
FIG. P7.38
FIG. P7.39
O
B
A
C(5.00, 5.00) m
x
y
13794_07_ch07_p153-174.indd 16413794_07_ch07_p153-174.indd 164 12/2/06 1:46:54 PM12/2/06 1:46:54 PM

Energy of a System 165
P7.40 (a) W d= ⋅∫� �F r and if the force is constant, this can be written as
W d f i= ⋅ = ⋅ −( )∫� � � � �F r F r r , which depends only oon end points, not path.
(b) W d dx dy dx= ⋅ = +( ) ⋅ +( ) = ( )∫ ∫� �F r i j i j3 4 3 00ˆ ˆ ˆ ˆ . N
00
5 00
0
5 00
4 00. .
.m m
N∫ ∫+ ( ) dy
W x y= ( ) + ( ) = +3 00 4 00 15 00
5 00
0
5 00. . .
. .N N J
m m220 0 35 0. .J J=
The same calculation applies for all paths.
P7.41 (a) The work done on the particle in its fi rst section of motion is
W dx y x ydxOA = ⋅ +( ) =∫ ∫ˆ ˆ ˆ. .
i i j2 22
0
5 00
0
5 00m m
and since along this path, y = 0 WOA = 0
In the next part of its path W dy y x x dyAC = ⋅ +( ) =∫ ∫ˆ ˆ ˆ. .
j i j2 2
0
5 002
0
5 00m m
For x = 5 00. m, WAC = 125 J
and WOAC = + =0 125 125 J
(b) Following the same steps, W dy y x x dyOB = ⋅ +( ) =∫ ∫ˆ ˆ ˆ. .
j i j2 2
0
5 002
0
5 00m m
since along this path, x = 0, WOB = 0
W dx y x ydxBC = ⋅ +( ) =∫ ∫ˆ ˆ ˆ. .
i i j2 22
0
5 00
0
5 00m m
since y = 5 00. m, WBC = 50 0. J
WOBC = + =0 50 0 50 0. . J
(c) W dx dy y x ydx x dyOC = +( )⋅ +( ) = +( )∫ ∫ˆ ˆ ˆ ˆi j i j2 22 2
Since x y= along OC, W x x dxOC = +( ) =∫ 2 66 72
0
5 00.
.m
J
(d) F is nonconservative since the work done is path dependent.
P7.42 Along each step of motion, the frictional force is opposite in direction to the incremental displacement, so in the work cos 180° = −1.
(a) W = (3 N)(5 m)(−1) + (3 N)(5 m)(−1) = −30.0 J
(b) The distance CO is (52 + 52)1�2 m = 7.07 m
W = (3 N)(5 m)(−1) + (3 N)(5 m)(−1) + (3 N)(7.07 m)(−1) = −51.2 J
(c) W = (3 N)(7.07 m)(−1) + (3 N)(7.07 m)(−1) = −42.4 J
(d) The force of friction is a nonconservative force.
13794_07_ch07_p153-174.indd 16513794_07_ch07_p153-174.indd 165 12/2/06 1:46:55 PM12/2/06 1:46:55 PM

166 Chapter 7
Section 7.8 Relationship Between Conservative Forces and Potential Energy
P7.43 (a) W F dx x dxx
xx= = +( ) = +⎛⎝⎜
⎞⎠⎟∫ ∫ 2 4
2
24
1
5 00 2
1
5 00. .m m
J= + − − =25 0 20 0 1 00 4 00 40 0. . . . .
(b) ∆ ∆K U+ = 0 ∆ ∆U K W= − = − = −40 0. J
(c) ∆K Km
f= − v12
2 K K
mf = + =∆ v1
2
262 5. J
P7.44 (a) U Ax Bx dxAx Bxx
= − − +( ) = −∫ 2
0
2 3
2 3
(b) ∆U FdxA
= − =( ) − ( )⎡⎣ ⎤⎦ −∫
2 00
2 23 00 2 00
2.
. .
m
3.00 m BBA B
3 00 2 00
3
5 00
2
19 0
3
3 3. . . .( ) − ( )⎡⎣ ⎤⎦ = −
∆K A B= − +⎛⎝
⎞⎠
5 00
2
19 0
3
. .
P7.45 U rA
r( ) =
FU
r
d
dr
A
r
A
rr = − ∂∂
= − ⎛⎝
⎞⎠ = 2 . If A is positive, the positive value of radial force
indicates a force of repulsion.
P7.46 FU
x
x y x
xx y x yx = − ∂
∂= −
∂ −( )∂
= − −( ) = −3 7
9 7 7 93
2 2
F
U
y
x y x
yx xy = − ∂
∂= −
∂ −( )∂
= − −( ) = −3 7
3 0 33
3 3
Thus, the force acting at the point x y,( ) is �F i j i j= + = −( ) −F F x y xx y
ˆ ˆ ˆ ˆ7 9 32 3 .
Section 7.9 Energy Diagrams and the Equilibrium of a System
P7.47 (a) Fx is zero at points A, C and E; Fx is positive at point B and negative at point D.
(b) A and E are unstable, and C is stable.
(c)
FIG. P7.47
A
B
C
D
Ex (m)
Fx
13794_07_ch07_p153-174.indd 16613794_07_ch07_p153-174.indd 166 12/2/06 1:46:55 PM12/2/06 1:46:55 PM

Energy of a System 167
P7.48
FIG. P7.48
stable unstable neutral
P7.49 (a) The new length of each spring is x L2 2+ , so its extension is
x L L2 2+ − and the force it exerts is k x L L2 2+ −( )
toward its fi xed end. The y components of the two spring forces add to zero. Their x components add to
�F i i= − + −( )
+= − −
+
⎛⎝⎜
⎞⎠
2 2 12 2
2 2 2 2ˆ ˆk x L L
x
x Lkx
L
x L ⎟⎟
(b) Choose U = 0 at x = 0. Then at any point the potential energy of the system is
U x F dx kxkLx
x Ldx kx
x x
( ) = − = − − ++
⎛⎝⎜
⎞⎠⎟
=∫ ∫0
2 20
22
2 xxdx kLx
x Ldx
U x kx kL L x L
x x
02 2
0
2 2 2
2
2
∫ ∫−+
( ) = + − +( ) (c) U x x x( ) = + − +( )40 0 96 0 1 20 1 442 2. . . .
For negative x, U x( ) has the same value asfor positive x. The only equilibrium point
(i.e., where Fx = 0) is x = 0 .
(d) K U E K Ui i f f+ + = +∆ mech
0 0 400 01
21 18 0
0 823
2+ + = ( ) +
=
. .
.
J kg
m s
v
v
f
f
Additional Problems
P7.50 The work done by the applied force is
W F dx k x k x dx
k
i
f x
= = − − +( )⎡⎣ ⎤⎦
=
∫ ∫applied 1 22
0
1
max
xx dx k x dx kx
kx
x x x x
0
22
0
1
2
0
2
3
02 3
max max max m
∫ ∫+ = +aax
max max= +kx
kx
1
2
2
3
2 3
FIG. P7.49
FIG. P7.49(c)
13794_07_ch07_p153-174.indd 16713794_07_ch07_p153-174.indd 167 12/2/06 1:46:56 PM12/2/06 1:46:56 PM

168 Chapter 7
P7.51 At start, �v i j= ( ) + ( )40 0 30 0 40 0 30 0. cos . ˆ . sin . ˆm s m s° °
At apex, �v i j i= ( ) + = ( )40 0 30 0 0 34 6. cos . ˆ ˆ . ˆm s m s°
And K m= = ( )( ) =1
2
1
20 150 34 6 90 02 2v . . .kg m s J
P7.52 (a) We write F ax
a
a
b
b
b
=
= ( )= ( )
=
1 000 0 129
5 000 0 315
5
N m
N m
.
.
00 315
0 1292 44
5 2 44
5
2 4
.
..
ln ln .
ln
ln .
⎛⎝
⎞⎠ =
=
=
bb
b
b44
1 80
1 0004 01 101 80
4
= =
=( ) = ×
.
..
b
aN
0.129 mN m1..8 = a
(b) W Fdx x dx= = ×
=
∫ ∫0
0 254 1 8
0
0 25
4 01 10.
..
.m
1.8
m N
m
44 01 102 8
4 01 1042 8
0
0 25
4..
.. .
× = ×N
m
N
m1.8
m
1.
x88
m
J
0 25
2 8
294
2 8.
.
.( )
=
*P7.53 (a) We assume the spring is in the horizontal plane of the motion. The radius of the puck’s motion is 0.155 m + x
The spring force causes the puck’s centripetal acceleration: (4.3 N�m) x = F = mv2�r = m(2πr� T)2�r = 4π 2 m r�(1.3 s)2
(4.3 kg�s2) x = (23.4�s2) m (0.155 m + x)
4.3 kg x = 3.62 m m + 23.4 m x
4.3000 kg x − 23.360 m x = 3.6208 m m
x = (3.62 m)�(4.3 kg − 23.4 m) meters
(b) x = (3.62 m 0.07 kg)�(4.30 kg − 23.4 [0.07 kg]) = 0.0951 m a nice reasonable extension
(c) We double the puck mass and fi nd x = (3.6208 m 0.14 kg)/(4.30 kg − 23.360 [0.14 kg]) = 0.492 m more than twice as big!
(d) x = (3.62 m 0.18 kg)�(4.30 kg − 23.4 [0.18 kg]) = 6.85 m We have to get a bigger table!!
(e) When the denominator of the fraction goes to zero, the extension becomes infi nite. This hap-pens for 4.3 kg − 23.4 m = 0; that is for m = 0.184 kg. For any larger mass, the spring cannot
constrain the motion. The situation is impossible.
(f) The extension is directly proportional to m when m is only a few grams. Then it grows faster and faster, diverging to infi nity for m = 0.184 kg.
13794_07_ch07_p153-174.indd 16813794_07_ch07_p153-174.indd 168 12/2/06 1:46:57 PM12/2/06 1:46:57 PM

Energy of a System 169
*P7.54 (a) A time interval. If the interaction occupied no time, the force exerted by each ball on the other would be infi nite, and that cannot happen.
(b) k = |F|�|x| = 16 000 N�0.000 2 m = 80 MN�m
(c) We assume that steel has the density of its main constituent, iron, shown in Table 14.1.
Then its mass is ρV = ρ (4�3)πr3 = (4π�3)(7860 kg�m3)(0.0254 m�2)3 = 0.0674 kg
and K = (1�2) mv2 = (1�2) (0.0674 kg)(5 m�s)2 = 0.843 J ≈ 0.8 J
(d) Imagine one ball running into an infi nitely hard wall and bouncing off elastically. The origi-nal kinetic energy becomes elastic potential energy
0.843 J = (1�2) (8 × 107 N�m) x2 x = 0.145 mm ≈ 0.15 mm
(e) The ball does not really stop with constant acceleration, but imagine it moving 0.145 mm forward with average speed (5 m�s + 0)�2 = 2.5 m�s. The time interval over which it stopsis then
0.145 mm�(2.5 m�s) = 6 × 10−5 s ∼ 10−4 s
*P7.55 The potential energy at point x is given by 5 plus the negative of the work the force does as a particle feeling the force is carried from x = 0 to location x.
dU Fdx dU e dx Ux
xU= − = − − = −−∫5
8 52
0∫∫ ∫−⎡⎣ ⎤⎦( ) −( )
= − −⎡⎣ ⎤⎦( )
−
−
8 2 2
5 8 2
2
0
2
/
/
e dx
U e
xx
x
00
2 25 4 4 1 1 4x
x xe e= + − ⋅ = +− −
The force must be conservative because the work the force does on the object on which it acts depends only on the original and fi nal positions of the object, not on the path between them.
P7.56 (a) �F i i= − − + +( ) = − −( )d
dxx x x x x3 2 22 3 3 4 3ˆ ˆ
(b) F = 0
when x = −1 87 0 535. .and
(c) The stable point is at
x = −0 535. point of minimum U x( )
The unstable point is at
x = 1 87. maximum in U x( )
FIG. P7.56
13794_07_ch07_p153-174.indd 16913794_07_ch07_p153-174.indd 169 12/2/06 1:46:58 PM12/2/06 1:46:58 PM

170 Chapter 7
P7.57 K W W K
m kx kx mg x
i s g f
i i f
+ + =
+ − + =1
2
1
2
1
2
1
22 2 2v ∆ cosθ mm
kx mgx m
f
i i f
v
v
2
2 201
20 100
1
2+ − + =cos °
1
21 20 5 00 0 050 0 0 100 9. . . .N cm cm m kg( )( )( ) − ( ) .. . sin .
.
80 0 050 0 10 0
1
20 100 2
m s m
kg
2( )( )
= ( )
°
v
00 150 8 51 10 0 050 0
0 141
0
3 2. . .
.
.
J J kg− × = ( )
=
− v
v0050 0
1 68= . m s
P7.58 (a) �F i j i1 25 0 35 0 35 0 20 5= ( ) +( ) = +. cos . ˆ sin . ˆ . ˆN ° ° 114 3. j( ) N
�F i j i2 42 0 150 150 36 4 2= ( ) +( ) = − +. cos ˆ sin ˆ . ˆN ° ° 11 0. j( ) N
(b) � � �F F F i j∑ = + = − +( )1 2 15 9 35 3. ˆ . ˆ N
(c) �a
Fi j= = − +( )∑
m3 18 7 07. ˆ . ˆ m s2
(d) � � �v v a i j if i t= + = +( ) + − +4 00 2 50 3 18 7 07. ˆ . ˆ . ˆ .m s ˆ .j( )( )( )m s s2 3 00
�v i jf = − +( )5 54 23 7. ˆ . ˆ m s
(e) � � � �r r v af i it t= + + 1
22
�r i j if = + +( )( )( ) + −0 4 00 2 50 3 00
1
23 18. ˆ . ˆ . . ˆm s s ++( )( )( )
= = − +
7 07 3 00
2 30 39
2. ˆ .
. ˆ .
j
r r i
m s s2
∆� �f 33 j( ) m
(f) K mf f= = ( ) ( ) + ( )⎡⎣ ⎤⎦1
2
1
25 00 5 54 23 72 2 2v . . .kg m s2(( ) = 1 48. kJ
(g) K mf i= + ⋅∑1
22v
� �F r∆
K f = ( ) ( ) + ( )⎡⎣ ⎤⎦( ) + −1
25 00 4 00 2 50 152 2 2
. . . .kg m s 99 2 30 35 3 39 3
55 6
N m N m
J
( ) −( ) + ( )( )[ ]
=
. . .
.K f ++ =1 426 1 48J kJ.
(h) The work-kinetic energy theorem is consistent with Newton’s second law, used in deriving it.
FIG. P7.57
13794_07_ch07_p153-174.indd 17013794_07_ch07_p153-174.indd 170 12/2/06 1:46:58 PM12/2/06 1:46:58 PM
Energy of a System 171
P7.59 We evaluate by 375
3 75312 8
23 7 dx
x x+∫ ..
.
calculating
375 0 100
12 8 3 75 12 8
375 0 100
12 93
.
. . .
.
.
( )( ) + ( ) + ( )
(( ) + ( ) + ( )( ) +3 33 75 12 9
375 0 100
23 6 3 75 23 6. .
.
. . .…
(( ) = 0 806.
and
375 0 100
12 9 3 75 12 9
375 0 100
13 03
.
. . .
.
.
( )( ) + ( ) + ( )
(( ) + ( ) + ( )( ) +3 33 75 13 0
375 0 100
23 7 3 75 23 7. .
.
. . .…
(( ) = 0 791. .
The answer must be between these two values. We may fi nd it more precisely by using a value for
∆x smaller than 0.100. Thus, we fi nd the integral to be 0 799. N m⋅ .
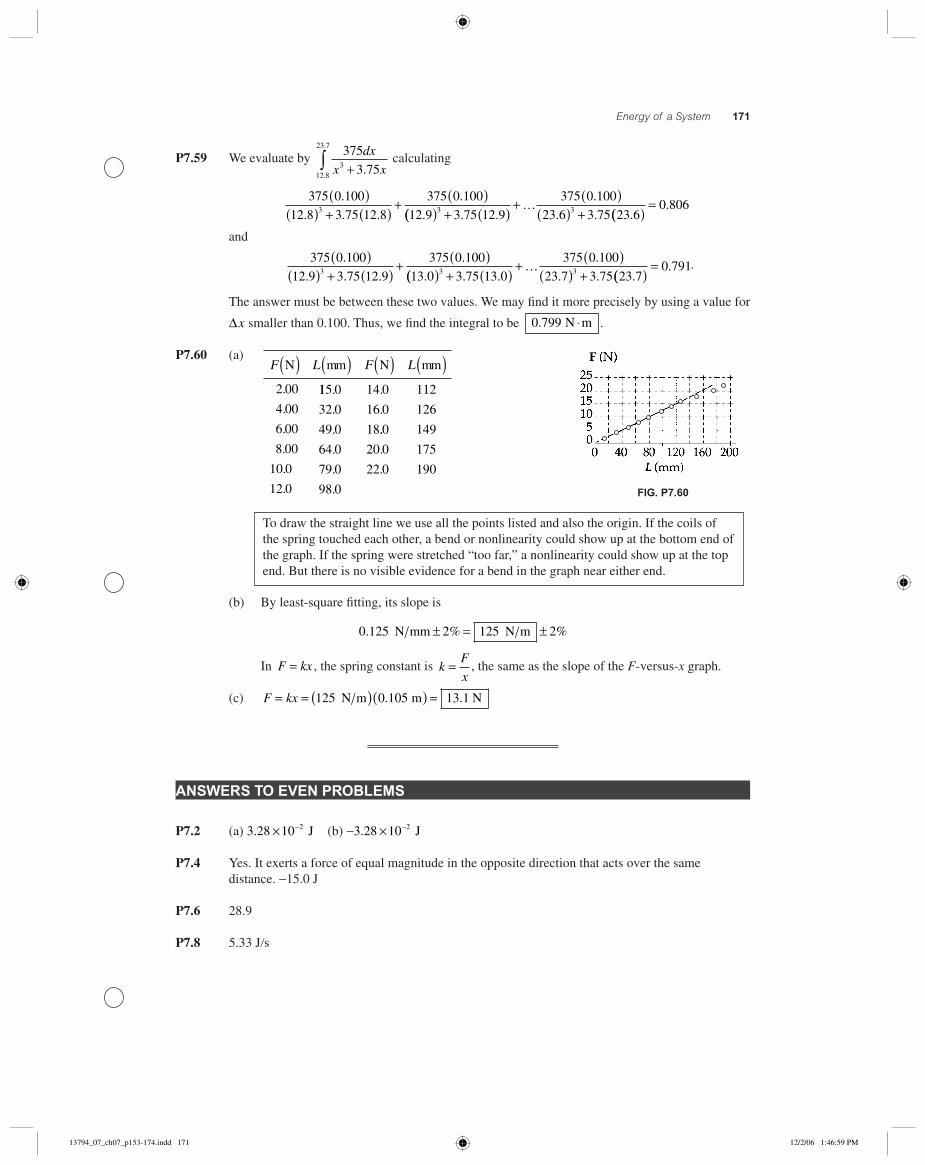
P7.60 (a) F L F LN mm N mm
2.00
4.00
6.00
8.00
10.0
12.0
( ) ( ) ( ) ( )115.0
32.0
49.0
64.0
79.0
98.0
14.0
16.0
18..0
20.0
22.0
112
126
149
175
190
To draw the straight line we use all the points listed and also the origin. If the coils of the spring touched each other, a bend or nonlinearity could show up at the bottom end of the graph. If the spring were stretched “too far,” a nonlinearity could show up at the top end. But there is no visible evidence for a bend in the graph near either end.
(b) By least-square fi tting, its slope is
0 125 2 125 2. % %N mm N m± = ±
In F kx= , the spring constant is kF
x= , the same as the slope of the F-versus-x graph.
(c) F kx= = ( )( ) =125 0 105 13 1N m m N. .
ANSWERS TO EVEN PROBLEMS
P7.2 (a) 3 28 10 2. × − J (b) − × −3 28 10 2. J
P7.4 Yes. It exerts a force of equal magnitude in the opposite direction that acts over the same distance. −15.0 J
P7.6 28.9
P7.8 5.33 J�s
FIG. P7.60
13794_07_ch07_p153-174.indd 17113794_07_ch07_p153-174.indd 171 12/2/06 1:46:59 PM12/2/06 1:46:59 PM

172 Chapter 7
P7.10 16.0
P7.12 (a) see the solution (b) −12 0. J
P7.14 50.0 J
P7.16 (a) 575 N m (b) 46.0 J
P7. 18 (a) 1.13 kN�m (b) 51.8 cm
P7.20 (a) −1.23 m�s2 and +0.616 m�s2 (b) −0.252 m�s2 and 0 (c) 0 and 0
P7.22 (a) 9.00 kJ (b) 11.7 kJ, larger by 29.6%
P7.24 (a) mg
k
mg
k1 2
+ (b) 1 1
1 2
1
k k+
⎛⎝⎜
⎞⎠⎟
−
P7.26 kg�s2
P7. 28 If the weight of the fi rst tray stretches all four springs by a distance equal to the thickness of the tray, then the proportionality expressed by Hooke’s law guarantees that each additional tray will have the same effect, so that the top surface of the top tray will always have the same elevation. 316 N�m. We do not need to know the length and width of the tray.
P7.30 (a) 33.8 J (b) 135 J
P7.32 (a) 1 94. m s (b) 3 35. m s (c) 3 87. m s
P7. 34 (a) yes. Its kinetic energy as it enters the sand is suffi cient to do all of the work it must do in plowing through the pile. (b) 0.306 m�s
P7.36 (a) 3 78 10 16. × − J (b) 1 35 10 14. × − N (c) 1 48 10 16. × + m s2 (d) 1.94 ns
P7.38 (a) 800 J (b) 107 J (c) 0
P7.40 (a) see the solution (b) 35.0 J
P7. 42 (a) −30.0 J (b) −51.2 J (c) −42.4 J (d) The force of friction is a nonconservative force.
P7.44 (a) Ax2�2 − Bx3�3 (b) ∆U = 2.5A −6.33B; ∆K = −2.5A + 6.33B
P7.46 7 9 32 3−( ) −x y xˆ ˆi j
P7.48 see the solution
P7.50 k1x
max2�2 + k
2x
max3�3
P7.52 (a) am
= 40 11 8
..
kN; b = 1 80. (b) 294 J
P7. 54 (a) A time interval. If the interaction occupied no time, the force exerted by each ball on the other would be infi nite, and that cannot happen. (b) 80 MN�m (c) 0.8 J. We assume that steel has the same density as iron. (d) 0.15 mm (e) 10−4 s
13794_07_ch07_p153-174.indd 17213794_07_ch07_p153-174.indd 172 12/2/06 1:47:00 PM12/2/06 1:47:00 PM

Energy of a System 173
P7.56 (a) Fx = (3x2 − 4x −3) (b) 1.87 and −0.535 (c) see the solution. −0.535 is stable and 1.87 is
unstable.
P7.58 (a) �F i j1 20 5 14 3= +( ). ˆ . ˆ N;
�F i j2 36 4 21 0= − +( ). ˆ . ˆ N (b) − +( )15 9 35 3. ˆ . ˆi j N
(c) − +( )3 18 7 07. ˆ . ˆi j m s2 (d) − +( )5 54 23 7. ˆ . ˆi j m s (e) − +( )2 30 39 3. ˆ . ˆi j m
(f ) 1.48 kJ (g) 1.48 kJ
(h) The work-kinetic energy theorem is consistent with Newton’s second law, used in deriving it.
P7. 60 (a) See the solution. We use all the points listed and also the origin. There is no visible evidence for a bend in the graph or nonlinearity near either end. (b) 125 2N m ± % (c) 13.1 N
13794_07_ch07_p153-174.indd 17313794_07_ch07_p153-174.indd 173 12/2/06 1:47:00 PM12/2/06 1:47:00 PM

13794_07_ch07_p153-174.indd 17413794_07_ch07_p153-174.indd 174 12/2/06 1:47:01 PM12/2/06 1:47:01 PM