slide 1 g. grossschmidt, m. harf, p. grigorenko tallinn university of technology modelling and...
TRANSCRIPT

Slide 1 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Modelling and Simulation of a Hydraulic-Mechanical Load-Sensing System in
CoCoViLa environment
Gunnar Grossschmidt Mait Harf
Pavel Grigorenko
Tallinn University of TechnologyInstitute of Machinery and Institute of Cybernetics

Slide 2 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Introduction
Fluid power systems, in which working pressure (pressure in pump output) is kept proportional to load, are called hydraulic load-sensing systems. Such systems are mainly used with the purpose to save energy.
Hydraulic load-sensing systems are automatically regulating systems with a number of components and several feedbacks. Feedbacks make the system very sensitive and unstable for performance and simulation. A very precise parameter setting, especially for resistances of hydraulic valve spools and for spring characteristics, is required to make the system function.
Steady state conditions and dynamic behavior of the hydraulic load-sensing system are simulated.

Slide 3 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Pump with regulator: • Variable displacement axial piston pump • Electric motor • Control valves • Control cylinder
Hydraulic motor feeding chain: • Tube RL-zu • Pressure compen- sator Ridw • Measuring valve Rwv • Check valve • Meter-in throttle edge Rsk-zu
Hydraulic motor Rverb
Hydraulic motor output chain: • Meter-out throttle edge Rsk-r • Tube RL-ab
p0 = const
RIDVW
Scheme of the hydraulic-mechanical load-sensing system

Slide 4 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Components • Spool valve• Spool valve inflow slot• Spool valve outflow slot• Constant resistor • Positioning cylinder • Swash plate with spring
Throttle edges• Measuring throttle edge Rvw• Pressure compensator throttle edge Ridw• Meter-in throttle edge Rsk-zu• Meter-out throttle edge Rsk-r
Controller Valve block

Slide 5 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Object-oriented modelling based on multi-pole models with oriented causality is used for fluid power systems.
A1 Q1 xp,vp Q2 A2 x,v v
p1 Fp p2 F
m, h
Q1 p1
H h Q2 p2 v F
G h Q1 p1
Q2 p2 v
F
Q1
p1
Y g Q2 p2 v
F
Q1 p1
Y h Q2 p2 v
F
Four forms (causalities) of six-pole models for a
hydraulic cylinder
The hydraulic cylinder has three pairs of variables: p1, Q1; p2, Q2; x (or v), F; where p1, p2 – pressures in the cylinder chambers, Q1, Q2 – volume flow rates in cylinder chambers, x, v – position and velocity of the piston rod,F – force on the piston rod.
For composing a model for the fluid power system, it is necessary to build multi-pole models of components and connect them between themselves.
Multi-pole models

Slide 6 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Composing the model
Component modelsVP - control valve RVP - meter-in throttle
edge of control valveZV - positioning cylinder REL - constant resistor RVT - meter-out throttle
edge of control valvePV - variable displacement
pumpME - electric motor RIDVWlin - linear measu-
ring valve with pres- sure compensator
RSKZ, RSKA - meter-in and meter-out throttle edge for hydraulic
motor MH - hydraulic motorIEH - hydraulic interface
element RtuHS - tubes
Multi-pole model of the hydraulic-mechanical load-sensing system for steady-state conditions

Slide 7 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Simulation steps
First, the hydraulic motor, hydraulic pump, electric motor and fluid
parameters must be chosen.
Second, initial approximate values of pressures, pressure differences for pump control, maximum displacements of the valves, parameters of springs, geometry of valves working slots, etc. must be set up.
Third, all the models of components must be tested separately. For this purpose, for every component the simulation problem must be composed, approximate input signals must be chosen and finally, action of the component must be simulated.
Fourth, the separately tested component models must be connected into more complicated subsystems and finally into whole system and tested in behavior.
Fifth, components models must be revised and parameters values of the system must be adjusted as a result of solving simulation tasks.
Slide 8 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
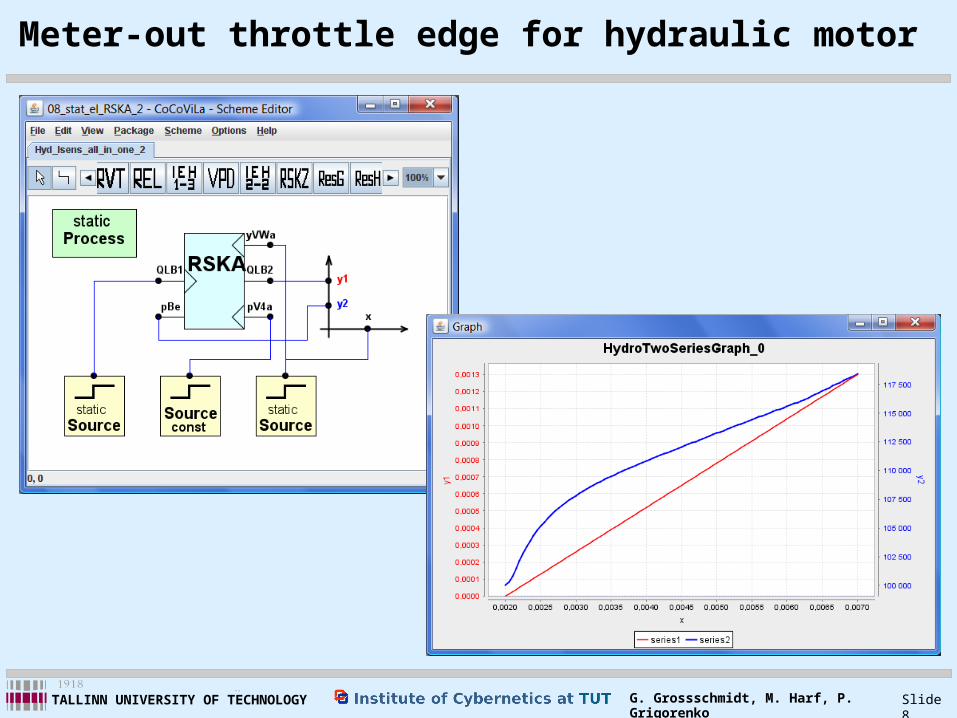
Meter-out throttle edge for hydraulic motor
Fig. 9 - Simulated pressure drop in measuring valve with pressure compensator depending on the displacement of the directional valve

Slide 9 G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Clutch with inertia
Fig. 9 - Simulated pressure drop in measuring valve with pressure compensator depending on the displacement of the directional valve

Slide 10
G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Hydraulic motor subsystem
Slide 11
G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
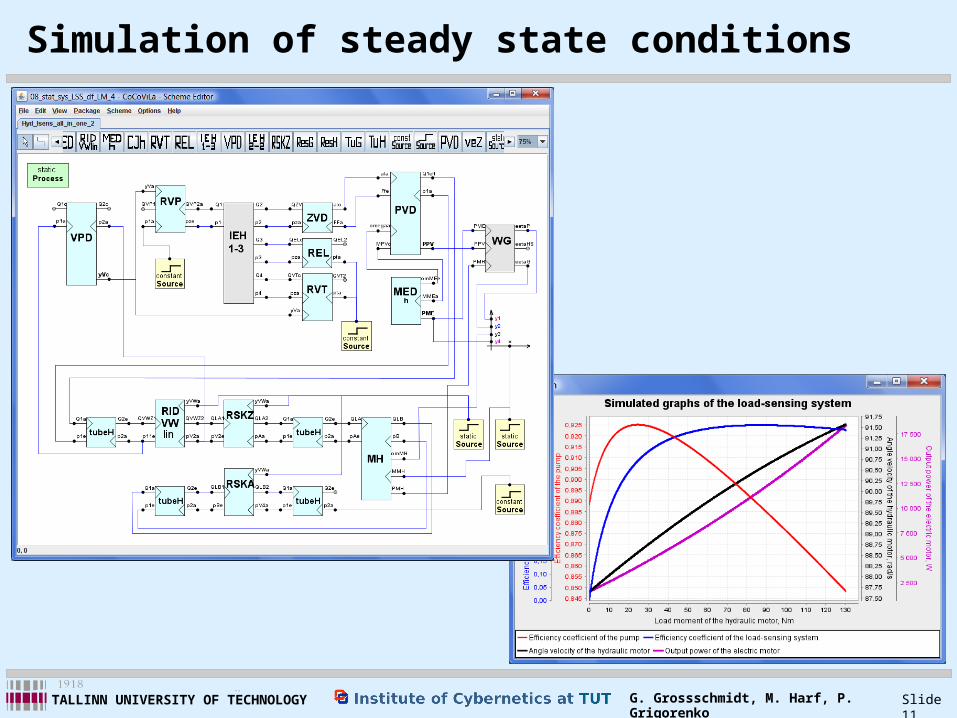
Simulation of steady state conditions

Slide 12
G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Simulation of dynamics
Simulation characteristics
Initial displacement of the directional valve 0.0045 m.Initial load moment of the drive mechanism
65 Nm.
Step change (during 0.01 s) is applied to:- the initial load moment- the initial displacement of the
directional valve.
Time step 5 µs.
Simulated time 0.5 s (results are calculated for 100 000 points).

Slide 13
G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Initial displacement of the directional valve 0.0045 m Load moment of the drive mechanism 65 NmStep change 0.001 m (during 0.01 s) applied to the initial displacement Time step is 5 µsSimulated time is 0.5 s (results have been calculated for 100 000 points). Simulation time 17.1 s

Slide 14
G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Initial load moment of the drive mechanism 65 Nm. Displacement of the directional valve 0.0045 mStep change 45 Nm (during 0.01 s) applied to the initial load moment. Time step is 5 µsSimulated time is 0.5 s (results have been calculated for 100 000 points). Simulation time 18.8 s

Slide 15
G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Size and complexity
The package for modelling and simulation of the load-sensing system contains:
- 42 classes, including 27 component classes;
- more than 1000 variables;
- 17 variables that have to be iterated during the computations;
- 73 links between system components.
The automatically constructed Java code for solving the simulation
task of the dynamics of the load-sensing system contains 4124 lines
and involves 5 algorithms for solving subtasks.

Slide 16
G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
3D simulation
3D simulation of steadystate conditions
Calculated
1000 x 1000 points
Calculation time
119 s

Slide 17
G. Grossschmidt, M. Harf, P. Grigorenko
TALLINN UNIVERSITY OF TECHNOLOGY
Thank you for attention