secondhands130.243.105.49/agora/erf2016/slides/secondhands.pdf · 2 the consortium karlsruhe...
TRANSCRIPT

Tamim Asfour Karlsruhe Institute of Technology March 22, 2016 ERF 2016, Ljubljana
SecondHands: A robot assistant for industrial maintenance
2
The Consortium
Karlsruhe Institute of Technology Germany Tamim Asfour, Sebastian Stüker & Alex Waibel
secondhands.eu 2015 - 2019
Ecole Polytechnique de Lausanne Aude Billard
Ocado Technology (Coordinator) Graham Deacon
University College London Lourdes Agapito
Universita degli Studi di Roma La Sapienza Fiora Pirri

3
The concept
A robot that provides a second pair of hands to a maintenance technician in warehouse environments

8
Expected Impact
• A significant advancement in the automation of the relatively unexplored domain of production machine maintenance
• Reduction in production machinery maintenance costs
• Technologies and techniques that can be used to construct robot assistants in other domains

9
The questions
1. What are the main AICo techniques used in your project?
2. What are the main technological challenges in your project that these AICo techniques are meant to address?
3. Have you found these techniques mature enough to use in a robotic system? If not, what is missing?
4. Have you found that these techniques add value to your project or product? More or less than you expected? Why?
10
The questions
1. What are the main AICo techniques used in your project? – Recognition of the need of help
– Grasping familiar objects and tools
– Knowledge model learned for understanding and reasoning about the maintenance operations
– Plan recognition of the technician activities, and plan execution and monitoring of the robot collaborative tasks
– Learning of fluent handover actions from human demonstration (robot to human and vice versa)
– Dynamic scene interpretation with unknown mixture of multiple moving and possibly deforming or articulated objects
– Spoken language and dialogue system for human-robot interaction

11
The questions
2. What are the main technological challenges in your project that these AICo techniques are meant to address?
– Mechatronics and system engineering: Complete integrated robot systems able to provide assistance in a set of maintenance tasks
– 3D perception for understanding of a dynamic environment
– Task-specific grasping of familiar objects and tools
– Natural human-robot interaction

12
The questions
3. Have you found these techniques mature enough to use in a robotic system? If not, what is missing?
– Missing • Versatile robot systems
• Reliable perception
• Grasping yet unsolved
• Natural human-robot interaction still very challenging

13
The questions
4. Have you found that these techniques add value to your project or product? More or less than you expected? Why?
– Yes
– We are at the beginning … and we are confident
14
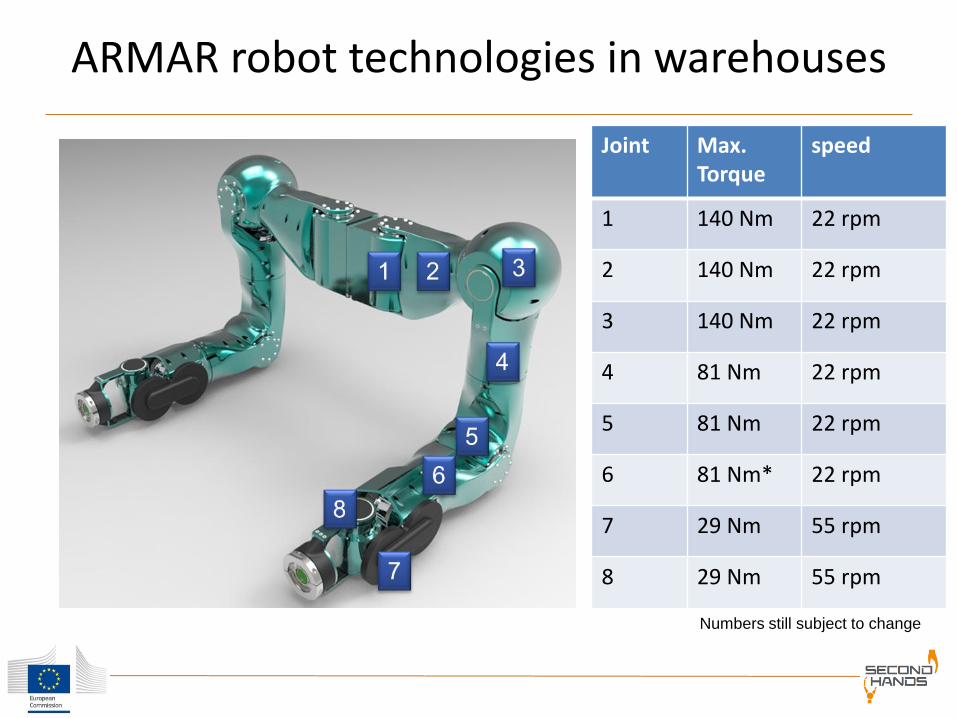
ARMAR robot technologies in warehouses
Joint Max. Torque
speed
1 140 Nm 22 rpm
2 140 Nm 22 rpm
3 140 Nm 22 rpm
4 81 Nm 22 rpm
5 81 Nm 22 rpm
6 81 Nm* 22 rpm
7 29 Nm 55 rpm
8 29 Nm 55 rpm
Numbers still subject to change
Master thesis
H. Fischbach

15
ARMAR robot technologies in warehouses
Fingers
with cables
and springs
Motors
Position
sensors Hand adapter
Box with
TUAT
mechanism
Elastic
metacarpals
palm

16
Thank you for your attention
secondhands.eu