scanning x-ray imaging techniques for characterization of...
TRANSCRIPT

General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
Users may download and print one copy of any publication from the public portal for the purpose of private study or research.
You may not further distribute the material or use it for any profit-making activity or commercial gain
You may freely distribute the URL identifying the publication in the public portal If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim.
Downloaded from orbit.dtu.dk on: Feb 10, 2019
Scanning X-ray Imaging Techniques for Characterization of Energy Materials
Ayres Pereira da Cunha Ramos, Tiago João
Publication date:2019
Document VersionPublisher's PDF, also known as Version of record
Link back to DTU Orbit
Citation (APA):A. P. C. Ramos, T. J. (2019). Scanning X-ray Imaging Techniques for Characterization of Energy Materials.Technical University of Denmark (DTU).

Scanning X-ray Imaging Techniques
for Characterization of Energy Materials
Tiago J. A. P. C. Ramos
DTU Risø Campus 2018


i
Preface
This thesis was prepared in partial fulfilment of the requirements for the acqui-
sition of a PhD degree at the Technical University of Denmark (DTU). The work
here described was carried out in the period of September 2015 to September
2018 in the section of Imaging and Structural Analysis of the department of En-
ergy Conversion and Storage, under the supervision of Professor Jens Wenzel
Andreasen.
This work was funded by the Innovation Fund Denmark (Innovationsfonden)
within the CINEMA (alliance for ImagiNg and Modelling of Energy Applica-
tions). Part of the work was performed in collaboration with the NanoMAX
beamline from the MAX IV laboratory, as part of the EU project ESS MAX IV –
Cross Border Science and Society and subproject MAX4ESSFUN Cross Border
Network and Researcher Programme.
14th September 2018
Tiago Ramos

ii

iii
Summary
The large and ever-growing energy needs call for an urgent shift for sustainable energy
sources. Associated to the current production of energy is the emission of noxious gas-
es that among other undesirable effects contribute for an increase of the greenhouse
effect and consequently to global warming. From the currently available energy
sources, solar energy is the one with the biggest potential to fulfil our current and fu-
ture energetic needs. To date, the main factors impeding upscaling and mass produc-
tion of solar cell devices are associated to their high production costs or low efficien-
cies, for which fossil fuels are still economically competitive.
The performance of solar cells, especially those from second- and third-generation, is
largely determined by their micro- and nano-scale. To improve their conversion effi-
ciency, scientists must first be able to measure and characterize the nanostructure of
the devices produced by current synthesis methods, so that these may be improved or
tuned to fulfil a specific need.
Emerging X-ray imaging techniques, such as coherent diffractive imaging methods,
have the potential to reach extremely high resolutions and are well suited for this task.
Currently the available spatial resolution delivered by such methods is limited by the
X-ray beam properties and by the performance of the numerical algorithms used for
image reconstruction. Furthermore, the combination of different X-ray imaging meth-
ods allows for complementary information about the sample from which the local elec-
tronic and chemical compositions can be derived.
This thesis is devoted to the improvement of current X-ray scanning imaging methods.
Our main contributions lie in the development of numerical algorithms for image data
analysis of X-ray fluorescence and X-ray ptychography. More specifically the thesis
includes the theoretical background of the main types of X-ray-matter interaction, a
brief description of some X-ray scanning imaging techniques, the description of the
developed algorithms and the report of recent experimental measurements for the
characterization of third-generation kesterite solar cells.

iv

v
Resumé
Det store og evigt voksende energiforbrug kræver indtrængende et skift til bæredygti-
ge energikilder. Forbundet med den nuværende produktion af energi via fossile
brændsler er udledningen af skadelige gasser, der blandt andet bidrager til global op-
varmning gennem drivhuseffekten. Ud af de energikilder, vi har tilgængelige i dag, er
solenergi den med det største potentiale til at dække vores nuværende og fremtidige
energiforbrug. De største faktorer, der til dato har begrænset opskaleringen og masse-
produktionen af solceller, er forbundet med høje produktionsomkostninger eller lav
effektivitet, hvilket til stadighed gør fossile brændsler økonomisk konkurrencedygtige.
Effektiviteten af solceller, specielt den af anden- og tredjegenerationssolceller, er ho-
vedsageligt bestemt af deres morfologi på micro- og nanoskala. For at forbedre deres
effektivitet kræves en indsats fra videnskabsmænd imod at blive i stand til at måle og
karakterisere strukturen af de solceller, der bliver produceret og printet fra opløsning,
så disse metoder bliver forbedret eller tunet til at opfylde specifikke behov.
Nye røntgenbilledbehandlingsmetoder, såsom koherent diffraktionsbilledbehandling,
har potentialet til at nå ekstremt høje billedopløsninger og er godt egnet til denne op-
gave. Den nuværende rumlige opløsning, der er opnåelig med denne og lignende me-
toder, er begrænset af egenskaberne af røntgenstråler og af effektiviteten af de nume-
risk algoritmer, der bliver brugt til at rekonstruere billederne fra disse eksperimenter.
Desuden tillader kombinationen af forskellige røntgenbaserede målemetoder os at få
komplementær information om vores prøver, så deres lokale elektroniske og kemiske
komposition kan blive analyseret og bestemt.
Denne Ph.D.-afhandling er koncentreret omkring forbedringen af de nuværende bil-
ledbehandlingsmetoder for røntgenskanning. Vores største bidrag baserer sig på ud-
viklingen af numeriske algoritmer til billedanalyse af røntgenfluorescens og –
ptychografi. Mere specifikt inkluderer denne afhandling en teoretisk baggrund for et
udvalg af røntgenskanningsmetoder, samt beskrivelsen af de udviklede algoritmer og
nylige eksperimentelle målinger i forbindelse med karakteriseringen af tredjegenera-
tionssolceller baseret på kesteritter.

vi

vii
Acknowledgments
I would like to express my immense gratitude to all the people I had the opportunity to
meet and work with, without whom this work would have not been possible.
First, to my parents, for all their support, guidance, and positive influences in my life to
whom I dedicate this thesis. I must say that in the last three years I was blessed with an
extraordinary team of people that I will remember and keep for all years to come. If I
was to properly address each in specific, this section would most likely become a dom-
inant part of this thesis. Instead I would like to briefly thank my co-workers and
friends Aleksandr, Anders, Azat, Christian, Giovanni, Khadijeh, Lea, Marcial, Mariana,
Megha and Michael for their friendship, enriching discussions, generous smiles besides
all their help in scientific matters for which I am sure they know I am grateful.
Thank you Mike, Mégane, Pia, Jørgen and Aia for taking the “role” of my family, for
sharing a house, and life’s ups and downs in these last three years.
Thank you Jens, for your academic support, trust, patience, advices and kind words in
the moments of most need. Thank you Jakob and Martin for your wise teachings and
suggestions in the fields of tomography and numerical optimization that were crucial
for my understanding of these subjects.
I also take this opportunity to thank Dr. Alexander Björling, Dr. Gerardina Carbone for
their support during my external collaboration project, and to the anonymous referees
for their useful suggestions in our manuscripts.
Last but not least, to the love and light of my life Sofia and Heidi, for their endless love,
understanding and long waiting. I’m coming home now.
Ulteia et Suseia!

viii
ix
List of symbols and abbreviations
𝐀 – System Matrix
𝐁 – Magnetic field
𝐵0 – Amplitude of magnetic field
𝑐 – speed of light in vacuum
𝑑ps – Detector pixel size
𝐄 – Electric Field
𝐸0 – Amplitude of electric field
𝑒 – photon energy
e – Euler number
𝐹 – Fresnel number
ℱ – Two dimensional Fourier Transform
ℱ1 – One dimensional Fourier Transform
𝑓0 – Atomic form factor
𝑔𝐾𝛼 – Transition probability for 𝐾𝛼 emission
ℎ - Plank’s constant
𝐢 – imaginary unit √−1.
��, 𝒋, �� – spatial unit vectors
𝐼𝑝 – Absorption projection
𝐼0 – Flat field projection
𝐼𝐷 – Dark field projection
𝐼𝑁 – Flat field corrected absorption projection
𝐉 – Current density field
𝐽𝐾 – Absorption jump factor
𝐤 – wave vector
𝐾𝛼 – X-ray emission line
𝐿 – Distance from sample to detector
𝐿𝐿 – Longitudinal coherence length
𝐿𝑇 – Transverse coherence length
𝑁𝑒−/ℎ+coll – Number of collected electric charges
𝑁𝑒−/ℎ+gen
– Number of generated electric charges
𝑛 – Refractive index
𝑂 – Object function
𝑃𝑨, 𝑃𝑩 - Projector operators in the Difference Map algorithm
𝑃 – Probe or illumination function
𝒑 – photon momentum

x
𝑝𝜙0 – Projection image or radiograph at the angle 𝜙0
𝑸 – Scattering vector
𝑄𝐾𝛼 – Excitation factor
𝑄(∙) – Wrapping operator
ℜ – Radon Transform
𝐫 - Position vector
𝑟ps – Reconstructed Pixel Size
𝑟0 – Thomson scattering length
𝑟𝐾 – K-shell absorption jump
𝑡 – Time instant
𝑊 – With of the object in CDI
𝑧 – Propagation direction
𝛼 – Incident angle
𝛼′ – Refracted angle
𝛽 – Imaginary part of the refractive index decrement from 1
𝛿 – Real part of the refractive index decrement from 1
Δ𝜆 – Wavelength bandwidth
Δ𝜙 – Phase-shift
𝛿(∙) - Dirac delta function
𝜖0 – Medium permittivity
2𝜃 – Scattering angle
𝜆 – wavelength
𝜆𝑒 – Electron wavelength
𝜇 – Linear absorption coefficient
𝜇0 – Medium permeability
𝜈 – wave spatial frequency
𝑣𝑝 – Radiation propagation speed
𝜌 – Mass density
𝜌𝑐 – Charge density
𝜌𝑒𝑙 – Electron density
𝜙0 – Initial phase
𝜓in – Incoming wave front
𝜓out – Exit wave front
𝜔𝐾 – Fluorescence yield of 𝐾 lines emission
∇ ∙ – Divergence operator
∇ × – Curl operator
ART – Algebraic Reconstruction Techniques
CCD – Charged-Coupled Device

xi
CDI – Coherent Diffraction Imaging
CE – Charge collection Efficiency
CGM – Conjugate Gradient Method
CT – Computed Tomography
DM – Difference Map
ER – Error Reduction (Fienup Error Reduction algorithm)
ePIE – extended Ptychographical Iterative Engine
EQE – External Quantum Efficiency
FBP – Filtered Back Projection algorithm
FCDI – Fresnel Coherent Diffraction Imaging
FDK – Feldkamp-Davis-Kress algorithm
FEL – Free-Electron Laser
FFT – Fast Fourier Transform
FOV – Field Of View
FTH – Fourier Transform Holography
FWHM – Full Width at Half Maximum
FZP – Fresnel Zone Plate
GPU – Graphics Processing Unit
HIO – Hybrid Input-Output
IQE – Internal Quantum Efficiency
KB - Kirkpatrick-Baez
LBIC – Laser Beam-Induced Current
NEXAFS – Near Edge X-ray Absorption Fine Structure
OBIC – Optical Beam-Induced Current
PHeBIE – Proximal Heterogeneous Block Implicit-Explicit
PIE – Ptychographical Iterative Engine
PSF – Point Spread Function
RAM – Rapid Access Memory
SAXS – Small Angle X-ray Scattering
SIRT – Simultaneous Iterative Reconstruction Techniques
SSE – Sum Squared Error
STXM – Scanning Transmission X-ray Microscopy
TEY – Total Electron Yield
WAXS – Wide Angle X-ray Scattering
XANES – X-ray Absorption Near Edge Structure
XBIC – X-ray Beam-Induced Current
XPEEM – X-ray PhotoEmission Electron Microscopy
XPS – X-ray Photonelectron Spectroscopy
XRF – X-Ray Fluorescence

xii
Table of Contents Preface .............................................................................................................................. i
Summary ...................................................................................................................... iii
Resumé............................................................................................................................ v
Acknowledgements .................................................................................................... vii
List of symbols and abbreviations ........................................................................... ix
Contents
1. Introduction and Motivation .................................................................................. 1
2. X-ray interaction with matter ................................................................................. 7
2.1 The wave-particle duality of X-rays .............................................................................. 8
2.2 Scattering ......................................................................................................................... 10
2.3 Absorption ....................................................................................................................... 15
2.4 Refraction......................................................................................................................... 16
2.5 The photoelectric effect and fluorescence emission .................................................. 18
Near-field or Fresnel Diffraction ........................................................................................ 22
Far-field or Fraunhofer Diffraction .................................................................................... 23
3. X-ray imaging techniques ..................................................................................... 24
3.1 Full-field imaging methods........................................................................................... 24
X-ray absorption imaging ............................................................................................... 24
Coherent Diffraction Imaging ........................................................................................ 26
Phase Retrieval in CDI ..................................................................................................... 27
Geometric considerations ................................................................................................ 29
Other forms of CDI .......................................................................................................... 31
3.2 Scanning imaging methods ........................................................................................... 32
Scanning Transmission X-ray microscopy – STXM ..................................................... 32
Scanning Coherent Diffraction Imaging – Forward Ptychography .......................... 33
Phase Retrieval in X-ray ptychography ........................................................................ 36
X-ray fluorescence mapping – XRF................................................................................ 43
X-ray beam induced current mapping – XBIC ............................................................. 48

xiii
3.3 Challenges in high-resolution imaging ....................................................................... 52
Coherence requirements.................................................................................................. 55
Phase-wrapping and Phase residues ................................................................................ 56
Radiation damage and X-ray dose ................................................................................. 58
Resolution Enhancement of STXM-type techniques by probe deconvolution ........ 59
4. X-ray Tomography .................................................................................................. 65
The Radon transform ....................................................................................................... 65
Analytical tomographic reconstruction......................................................................... 67
Iterative tomographic reconstruction ............................................................................ 71
Tomographic alignment of high-resolution phase-contrast projections .................. 74
Combined three-dimensional phase retrieval and tomographic reconstruction of
scanning coherent diffraction imaging techniques ...................................................... 76
5. Multimodal techniques for the characterization of solar cells ...................... 77
Sample preparation .............................................................................................................. 78
Experiment description ....................................................................................................... 79
Technical challenges ............................................................................................................ 80
Data analysis ......................................................................................................................... 80
Results .................................................................................................................................... 81
Conclusions ........................................................................................................................... 82
Bibliography ................................................................................................................ 84
Annexes ........................................................................................................................ 93

xiv

1
1. Introduction and Motivation“I would put my money on the sun and solar energy. What a source of power! I hope we
don’t have to wait until oil and coal run out before we tackle that”.
Thomas Edison
All living organisms need and are driven by energy. In particular with the rise of mod-
ern civilizations and population growth, humans require ever-growing amounts of
energy that today are expected to increase by approximately 45% until 2030 [1]. At pre-
sent, our species consumes roughly 16 terawatts of power, which put into perspective,
is equivalent to the amount of energy required to fuse and boil to steam 60 kg of ice per
person per day or to the energy released by an atomic bomb every 4 seconds†. From the
total of 16 terawatts (TW), roughly 85% is provided by the consumption of fossil fuels
such as oil, coal and natural gas [1] which are considered to be non-renewable energy
sources since they were created by biological and geological processes over millions of
years and cannot be replenished at the current rate of consumption. The relatively high
abundance of fossil fuels and the high-energy density associated with the chemical
bonds in hydrocarbons made them preferential energy sources, especially during the
industrial revolution, awarding several advantages for social and technological evolu-
† The energy used to fuse and boil to steam 1 kg of ice, assumes a transition from 0 °C to 100 °C
at atmospheric pressure (fusion latent heat: 334 kJ/kg; vaporisation latent heat: 2265 kJ/kg; spe-
cific heat: 4.182 kJ/kg). The atomic bomb used as reference is known by its code name “Little
Boy”, dropped in Hiroshima on August 1945 with a total blast yield of 63 TJ.
Figure 1.1: Primary energy consumption [1] and greenhouse gas emissions [2], [3] of different regions of
the world for the period 1970-2012. Energy consumption expressed in megatonnes of oil equivalent
(Mtoe), and greenhouse gas emissions in gigatonnes of equivalent CO2. The dashed lines on the right
plot correspond only to CO2 whereas the solid lines include the contributions of CH4 and N2O.

2
tion. However, the large consumption of these types of fuels are associated with the
emission of noxious gases, e.g. hydrogen fluoride (HF), sulphur dioxide (SO2), nitrogen
oxides (NOx), and carbon dioxide (CO2). These are responsible for climate changes and
more specifically for the increase of the greenhouse effect. It is often said that “correla-
tion does not always imply causality”, but in this case, it is now common knowledge
that the increase of primary energy consumption is associated with a direct increase in
the concentrations of greenhouse gases in the atmosphere as shown Figure 1.1, and
consequently with global warming [1]–[3]. According to the Intergovernmental Panel
on Climate Change (IPCC), the average temperature on Earth has increased by roughly
0.8 °C over the period 1880-2012 as a consequence of human activity [4]. If we choose
to be responsible for mitigating such an effect or even reverse it, we must first realize
that the climate change problem is essentially an energy problem, which we may ad-
dress by transitioning to alternative and renewable energy sources.
Figure 1.2 summarizes the different energy reserves known in 2008 and the potential
power available from renewable energy sources [5]. If we were to meet our present
energy needs with renewable energy sources, wind and solar power would certainly
play a major role. Coal, petroleum, and natural gas reserves can potentially fulfil our
Global Energy Consumption (2008)
/*
Figure 1.2: Potential power output from available energy sources [5]. *Finite non-renewable sources are
represented by their total energy reserve in Terawatt-year, while renewable sources by their potential
power output in Terawatt (equivalent to Terawatt-year/year). The world’s total energy consumption for
2008 is represented by a red dash-dotted line. Please note that for visualization purposes, the vertical
axis is broken in two locations depicted by the hatched bars. Here, OTEC stands for Ocean Thermal
Energy Conversion. The bars in yellow correspond to variations in the predictions taken from different
sources.

3
energy needs for some decades but are finite and will eventually expire. Moreover,
their environmental impact alone calls for an urgent shift to cleaner and sustainable
energy sources. There are different factors driving this energy transition, ranging from
political to economic and social issues. It is the role of scientists to develop and pro-
mote new technologies, to increase their efficiency, and to reduce their production and
operation costs.
During my PhD studies I had the opportunity to participate in the scientific research
activities of DTU Energy that span many different energy production and storage
technologies as e.g. from solid oxide fuel cells, solid oxide electrolysis cells, batteries,
and third-generation photovoltaics. The interest in research on solar cell technologies
and materials is surely well supported by the immense power potential in solar energy
as illustrated in Figure 1.2. The research and development of solar cells may be
grouped in three different classes or generations. First-generation devices use silicon
semi-conductors as energy absorber material; they are simple in constitution, inherent-
ly stable, and have a relatively high efficiency, but at the same time they require high
manufacturing temperatures, energy and materials. Consequently, silicon-based solar
cells have a longer energy payback time when compared to second- and third-
generation devices that aim to address this issue by employing different absorber ma-
terials produced with faster and more energy-efficient manufacturing processes. More
specifically, the third-generation photovoltaics are characterized by the use of earth-
abundant and non-toxic elements where emerging technologies exploiting perovskite
and kesterite materials are currently a hot research topic. However the low production
costs and energy payback times associated with these technologies – the latter of which
can potentially reach < 10 days compared to a few years for silicon [6], [7] – comes at
the cost of relatively low efficiencies and lifetimes. So far, these are the major impedi-
ments for the upscaling and mass-production of second- and third-generation photo-
voltaics that today are still not economically competitive when compared to other en-
ergy sources. If we chose to adopt these new generations of photovoltaics as a major
energy production technology we must first address the problems associated with their
relatively low efficiency and stability so that the immense energy potential from the
sun can be harvested to fulfil our energy demands.

4
The performance of diverse engineering materials is greatly driven by their internal
structure down to the micro- and nano-scale. The recent and future development of
materials for energy applications stretches over multiple scientific fields from numeri-
cal modelling to manufacturing, characterization and testing. In order to image and
characterize these different materials at their micro- and nano-scale, electron and X-ray
microscopy techniques are often employed. X-ray microscopy is a non-invasive imag-
ing technique well suited for such studies, as it requires minimal sample preparation, is
able to provide high spatial resolutions and different contrast mechanisms, and allows
for quantitative measurements and in situ or operando experimental setups. However,
in some applications, the spatial resolution and contrast provided by X-ray imaging
methods sits currently near, but still not exactly, at the limit required for proper imag-
ing and characterization of the features of interest. Let us take as example the case of
organic photovoltaics (OPV), a current research field at DTU Energy mainly distin-
guished by their highly competitive and very low energy payback times. The materials
responsible for the absorption of light in OPV devices belong to the class of organic
semiconductors. In organic semiconductors the difference between the electrons va-
lence band and conduction band, or band gap, happens to match the energy of photons
in the visible part of the light spectrum. As consequence, upon excitation by visible
light, an exciton or electron-hole pair is formed in the organic semiconductor. In order
to generate an electric current the exciton must be first dissociated into free charge car-
riers. Contrarily to silicon devices, the binding energy of the exciton in OPVs is rela-
tively high which prevents a simple and efficient charge separation. One of the sim-
plest ways to achieve a proper charge separation is by combining two different semi-
conductor materials with different conduction band energies. This way, one of the ma-
terials becomes an electron donor while the other an acceptor and the opposite could
90%
24 nm
10%
Figure 1.3: Resolution limitations in X-ray tomography. On the left: vertical slice through reconstructed
tomogram of a tandem organic solar cell. Phase-contrast projections were obtained by ptychography
reconstructions on diffraction data acquired at the cSAXS beamline at the Paul Scherrer Institut (PSI)
(2014). On the right: line profile across two-layers with different contrast (orange line on left figure)
displaying a spatial resolution of approximately 24 nm, busing the 10%-90% criterion.

5
be said for the case of holes. However, the exciton dissociation into charge carriers oc-
curs only at the interface between the two semiconductors, and the exciton has a lim-
ited life-time which limits the distance it can migrate, before it recombines and dissi-
pates its energy as heat. It has been shown in the literature that the exciton lifetime sets
a limit to its mean diffusion length of around 10 nm [8]. So in the case an exciton is
formed in one of the semiconductors at a distance larger than 10 nm to an interface, no
charge separation is possible and no electric current is created. This fact suggests that
the nano-structure of the active layer of OPVs at the nanometre scale is of crucial im-
portance for the efficiency of charge collection and the overall device performance.
Accordingly, sub-10 nm resolution imaging methods are a requisite for proper imaging
and characterization of the materials (and their interfaces) that constitute the device’s
active layer. In the past years we have been able to image and characterize OPV devic-
es with coherent X-ray diffractive imaging methods, with spatial resolutions of around
20 nm as shown by the example in Figure 1.3. The path to higher spatial resolutions
comprises mostly technological challenges. New generation synchrotrons and devel-
opments in X-ray optics will provide more stable and coherent X-rays in a near future,
but the full potential of X-ray imaging techniques, namely diffractive imaging meth-
ods, is only fully realized when followed by advanced numerical algorithms for imaging
and tomographic reconstruction.
During my PhD studies, most of my work was devoted to the development of new
computational tools for X-ray imaging analysis. Our contributions included the devel-
opment of an automated tomographic alignment and reconstruction algorithm [9], an
optimization algorithm for resolution enhancement of X-ray fluorescence maps, and an
algorithm for direct three-dimensional tomographic reconstruction and phase-retrieval
of coherent diffraction patterns.
This thesis introduces the fundamental X-ray theory and imaging techniques that I
have worked with in the past three-years, justifying the models and assumptions made
and identifying some of the possible limitations of the devised methods. The following
chapters are organized as follows:
Chapter 2 gives a description of the main X-ray interactions with matter, and free-
space propagation of coherent X-rays.
Chapter 3 summarizes the X-ray techniques that I have worked with, with special
focus on X-ray scanning methods.
Chapter 4 describes the fundamental model and main reconstruction algorithms for
X-ray tomography.
Chapter 5 is devoted to reporting some preliminary results from a very recent X-
ray experiment for the characterization of third-generation kesterite solar cells.

6
Annexes :
Journal Articles Included in This Thesis:
Ramos, T., Jørgensen, J. S., & Andreasen, J. W. (2017). Automated angular and
translational tomographic alignment and application to phase-contrast imaging.
Journal of the Optical Society of America A, 34(10), 1830-1843.
Ramos, T., Frønager, B. E., Andersen, M. S., & Andreasen, J. W. (2018). Direct 3D
tomographic reconstruction and phase-retrieval of far-field coherent diffraction
patterns. Pre-print available on arXiv under http://arxiv.org/abs/1808.02109.
(Submitted to Physical Review Applied)
Developed Software
Ramos, T., Jørgensen, J. S., & Andreasen, J. W. (2017). AutoTomoAlign – MATLAB
scripts for automatic tomographic alignment and reconstruction of phase-contrast data.
Available online under the DOI: 10.5281/zenodo.495122.
Ramos, T., Frønager, B. E., Andersen, M. S., & Andreasen, J. W. (2018). 3DscanCDI –
MATLAB functions and scripts for 3D inversion (phase-retrieval and tomographic re-
construction) of scanning coherent diffraction patterns. Available online under the
DOI: 10.6084/m9.figshare.6608726.
Ramos, T., & Andreasen, J. W. (2017). FMRE – Fluorescence Map Resolution Enhance-
ment by probe deconvolution. Python plugin available at the NanoMAX GitHub
webpage https://github.com/alexbjorling/nanomax-analysis-utils/tree/fmre.

7
2. X-ray interaction with matter“I did not think. I investigated… It seemed at first a new kind of invisible light. It was
clearly something new, something unrecorded… There is much to do…”
Wilhelm Röntgen
As many important human discoveries, X-rays were found by accident. The first de-
scription of X-rays is credited to Dr. Wilhelm Röntgen, a professor at Würzburg Uni-
versity in Germany, who in 1895 accidentally produced and detected the fluorescence
effect of X-rays while working with a cathode-ray tube in his laboratory. The discovery
of X-rays or Röntgen rays earned him the very first Nobel Prize in Physics in 1901 and
opened a new window for scientific and technological breakthroughs in the following
century. Today, 120 years after their discovery, X-ray applications span many different
fields from materials science, bio-medicine, physics, chemistry, astronomy and securi-
ty.
X-rays are a form of electromagnetic radiation (EMR) such as light characterized by
their short wavelengths (0.1 to 1 Å), or equivalently high energies (100 eV to 100 keV).
Like all electromagnetic waves, X-rays transport energy in space, travel in straight lines
and are not affected by electric or magnetic fields. In general, EMR interacts with mat-
ter by interacting with the electrons in its atoms.
The range of wavelengths that comprises the X-ray spectrum happens to match the
interatomic distances of solids, liquids and molecules. This property confers X-rays the
ability to penetrate different materials and to interplay with their atomic and crystal-
line structure in a variety of ways. By measuring and interpreting the effects of such
interactions, scientists are able to access atomic-level information about the chemical
composition and crystalline structure of a large group of materials.
The idea that light can be treated as waves or as particle-like discrete packages of elec-
tromagnetic energy is essential for the explanation of the X-ray interaction phenomena
that govern the main X-ray measuring techniques. For convenience I will freely alter-
nate between both wave and particle conventions/descriptions when describing each of
the main types of X-ray-matter interactions.
This chapter introduces the main different types of X-ray-matter interactions used for
materials characterization and imaging with X-rays as well as the mathematical formu-
lations that sustain such models.

8
2.1 The wave-particle duality of X-rays X-rays, as light, exhibit a wave-particle duality i.e. some of their behaviour such as in-
terference and diffraction are explained and modelled by the wave theory, while other
phenomena such as the photoelectric effect, fluorescence and Compton scattering treat
X-rays as consisting of elementary particles, photons.
Despite the competing theories of Christiaan Huygens and Isaac Newton about the
nature of light, within the classical theory, X-rays or any other form of EMR, radiate
from a source and propagate through a medium as waves. The wavelength 𝜆 is de-
pendent on the medium the wave travels through (e.g. air, vacuum or other material)
and relates with the wave spatial frequency 𝜈 and its propagation speed 𝑣𝑝 by the
equation 𝜆𝜈 = 𝑣𝑝. In vacuum 𝑣𝑝 is commonly denoted by ≈ 3 × 109 ms−1 . Electromag-
netic waves are in turn defined as synchronized oscillations of the electric (𝐄) and
magnetic (𝐁) fields perpendicular to the propagation direction. The dynamical behav-
iour of an electromagnetic field, i.e. the relationship between 𝐄 and 𝐁, their evolution in
time and space and interaction with a given medium, is generalized, in classical elec-
tromagnetism, by the Maxwell equations.
The Maxwell equations consist of a set of four partial differential equations, two scalar
and two vector equations. For a given position vector 𝐫 = 𝑥�� + 𝑦𝒋 + 𝑧��, and time in-
stant 𝑡:
∇ ∙ 𝐄(𝐫, 𝑡) =𝜌𝑐
𝜖0, (Gauss’ law for electricity) (2.1)
∇ ∙ 𝐁(𝐫, 𝑡) = 0, (Gauss’ law for magnetism) (2.2)
∇ × 𝐄(𝐫, 𝑡) = −∂𝐁(𝐫,𝑡)
∂t, (Faraday’s law of induction) (2.3)
∇ × 𝐁(𝐫, 𝑡) = μ0𝐉(𝐫, 𝑡) + μ0ϵ0∂𝐄(𝐫,𝑡)
∂t. (Ampere’s law) (2.4)
Here, 𝐉 represents the current density vector-field, 𝜌𝑐 the charge density, 𝜇0 the medi-
um permeability and 𝜖0 the medium permittivity. ∇ ∙ and ∇ × represent the divergent
and curl operators respectively.
Under the assumption of zero current and charge density (𝜌𝑐 = 0, 𝐉 = 𝟎), together the
Maxwell equations can be used to derive the wave equation (Helmholtz) for the specif-
ic description of X-ray propagation. A simple solution for the wave-equation, common-
ly used in optics, arises from the small-angle or paraxial approximation. Under the
paraxial approximation, rays propagate through a reference axis with small divergence
angles 𝜃, so that the approximations sin𝜃 ≈ 𝜃, tan 𝜃 ≈ 𝜃 and cos 𝜃 ≈ 1 are valid. The
following expressions result from the previous considerations:

9
𝐄(𝐫, 𝑡) = 𝐸0exp[𝐢(𝐤 ∙ 𝐫 − 2𝜋𝜈𝑡 + 𝜙0)], (2.5)
𝐁(𝐫, 𝑡) = 𝐵0exp[𝐢(𝐤 ∙ 𝐫 − 2𝜋𝜈𝑡 + 𝜙0)]. (2.6)
Here, 𝐸0 and 𝐵0 represent the amplitudes of the electric and magnetic field respective-
ly, 𝐢 is the imaginary unit (√−1), 𝜙0 the phase at 𝑡 = 0, and 𝐤 is the wave vector. The
wave vector, also known as k-vector, is a unit vector (versor) that describes the phase
variation/evolution of a plane wave in Cartesian coordinates. The magnitude of this
vector is known as wavenumber 𝑘 and relates with the X-ray wavelength according to
𝑘 =2𝜋
𝜆(2.7)
Although the Maxwell equations, or more generally the classical wave theory, success-
fully describes and models many of light (and X-rays) propagation and interference
effects, it fails to explain the photoelectric effect first observed by Heinrich Hertz in
1887. It was only after Max Planck’s suggestion that energy carried by electromagnetic
waves could only be released in discrete amounts (“packets”) of energy, that in 1905
Albert Einstein explained the photoelectric effect. Einstein’s observations about the
discrete or quantum nature of light were later supported/sustained by Arthur Comp-
ton’s discovery of the Compton effect and the relation between photon energy (𝑒) and
frequency:
e = hν =hc
λ, (2.8)
where ℎ is the Planck’s constant. Photons have a relativistic mass, and consequently a
momentum 𝒑 that relates to the wave vector by
𝒑 =ℎ
2𝜋𝒌. (2.9)
The momentum of a photon 𝒑 has a propagation direction (same as 𝒌) and quantized
energy. Equation (2.9) may be rewritten as the de Broglie wavelength, that relates the
wavelength of any relativistic particle with its momentum as
𝜆 =ℎ
|𝒑|=ℎ
𝑝. (2.10)
The different types of X-ray-matter interaction can be classified depending on the effect
of electrons of an atom on an incoming photon’s momentum (or wave vector). When
only the direction of the momentum is affected, the effect is known as elastic scattering.
This happens without energy-transfer between the photon and the electron, and the
scattered X-rays have the same energy/wavelength. A photon can also lose some of its
energy during this event (inelastic scattering) by a process called absorption.

10
Scattering and absorption together encompass other relevant effects, such as X-ray ion-
ization and fluorescence, reflection and refraction, which along with diffraction and
coherent interference, establish the fundamental principles of X-ray techniques for
chemical and structural characterization of materials.
A thorough understanding of all these events requires the introduction of many differ-
ent physical and mathematical concepts including quantum mechanics and special
relativity that are not part of the scope of this thesis. Instead, I will mainly focus on the
subjects of scattering, refraction, coherent scattering or diffraction, X-ray fluorescence
(XRF) and X-ray beam induced current (XBIC) that are the most pertinent within my
research area.
2.2 Scattering The most elementary type of X-ray-matter interaction is perhaps between an X-ray
wave and an electron. In classical electromagnetism the elastic scattering of EMR by a
free charged particle, such as an electron, is known as Thomson scattering. This form of
scattering occurs when the photon energy of the incoming X-rays and the energy of the
electron are different and happens without energy loss of the incoming photon.
Under a first-order approximation, nuclear interactions and the effect of the light’s
magnetic field in a photon-electron interaction can be neglected. The electric field of
the incident photon, however, accelerates the charged particle (electron) in its polariza-
tion direction and with the same spatial frequency. Whenever a (non-relativistic)
Figure 2.1: Scattering from a free electron. (a) An incoming wave forces the electron to accelerate. The
electron emits an electromagnetic wave perpendicular to its acceleration. The surfaces represent areas
of constant amplitude, differentiated by different colours. (b) The electron scatters in all directions.
Areas of constant amplitude as in (a) are represented with dashed-lines. Far from the source, the wave-
front (areas with same phase) represented by solid lines, becomes a plane wave with the same wave
vector as the incoming wave. The intensity of the emitted waves is proportional to the thickness of the
lines describing the wave fronts.

11
charged particle is accelerated, i.e. its velocity changes in amplitude or direction, it acts
as a dipole and emits EMR. The electron can also oscillate with different modes (differ-
ent frequencies) and scatter polychromatic radiation but for simplicity I will consider
only the case of monochromatic waves i.e. with a unique wavelength or energy.
As several photons interact with the electron its acceleration gets stronger. The electron
vibrates at the same frequency, in the elastic case, but with higher amplitude. The am-
plitude of the emitted waves is higher closer to the source and in the direction perpen-
dicular to the electron’s acceleration. For this reason, in Thomson scattering and far
from the source, the eradiated wave has the propagation direction, or wave vector, as
the incoming excitation wave. However, it is important to say that the emitted wave is
scattered by the electron in all directions. The phase of the emitted wave is also differ-
ent from the incoming photon having a −180° shift in Thomson scattering. The conse-
quence of this negative phase-shift results in values of refractive indices smaller than 1
in the X-ray regime.
The phase of the scattered wave from the electron plays a critical role in the process of
constructive and destructive interference of waves that explains scattering from atoms,
molecules, crystals or any other periodic structure at the atomic level
To understand the phenomenon of wave interference one often relies on the principle
of superposition of waves. This states that at any point in space or time, the net dis-
placement resulting from the superposition or addition of waves equals the sum of their
individual displacements at the same point. The exact wave equation resulting from
the addition of different individual waves requires an analysis with tedious series ex-
pansions that I found unnecessary and preferred to avoid. Instead I highlight that, for
monochromatic polarized waves, a wave resulting from such superposition has an
amplitude and phase defined by the amplitude and relative phase-difference between
the individual incoming waves. When the resulting wave’s amplitude is higher than
the incoming waves the interference is said to be constructive. The maximum ampli-
tude results when the relative phase between the incoming waves is 0 (or a multiple of
2𝜋). In this case the waves are said to be in-phase and the interference to be perfectly
constructive. Analogously, the two same waves could interfere destructively if their
phase difference were an even multiple of 𝜋 as shown in Figure 2.2. In the phase region
in between 0 and 𝜋, two waves can still interfere resulting in a wavefront with lower
amplitude than the perfectly constructive case but still monochromatic and with the
same frequency as the incoming waves. When two waves do not share the same fre-
quency the interference is said to be non-coherent, and is usually referred to as inco-
herent addition, while the term interference is often reserved for the coherent case.

12
Far from it, an electron or any other point where waves may interfere constructively
can be seen as a source of coherent waves. Because the range of wavelengths that con-
stitute the X-ray spectrum is within the same order of magnitude as the distance be-
tween electrons in an atom, or between atoms in a molecule or a crystal, further con-
structive interference phenomena occur at preferential directions. When the same inci-
dent wavefront is scattered at two different locations as exemplified in Figure 2.3, it
does so by taking paths with different lengths. Conse-quently, the wave has different
phases at the scattering volumes, which relative differ-ence is given by the internal
product between the incoming wave vector 𝒌in and the relative position vector 𝒓.
Analogously, the scattered waves also travel different dis-tances and thus have a
different relative phase. The total phase-shift Δ𝜙 experienced by an incoming wave
when scattered from two different points can be expressed in terms of the scattering
vector 𝑸 as
Δ𝜙 = 𝑸 ∙ 𝒓, (2.11)
where
𝑸 = 𝒌in − 𝒌out. (2.12)
The scattering vector 𝑸, also known as wave vector transfer, is often expressed in units
of Å−1 and describes the scattering process. In elastic scattering, the momentum trans-
fer occurs without energy loss |𝒌in| = |𝒌out| = 𝑘 and thus |𝑸| = 2𝑘 sin(𝜃) =
(4𝜋 𝜆⁄ ) sin(𝜃). In an X-ray scattering experiment, if 𝜆 is known then 𝑸 can be indirectly
Incoherent addition of waves
The interference may be constructive or destructive but the resulting amplitude is always smaller than the coherent case, and the resulting wave is not monochromatic.
Coherent constructive interference
The interference is perfectly constructiveand the amplitude of the resulting wave isthe sum of the original waves amplitudes.
Coherent destructive interference
The phase difference between the waves is an
even multiple of , which results in theirmutual cancelation.
(a)
(b)
(c)
Figure 2.2: Graphical representations of interference between waves. (a) two waves with the same fre-
quency and phase result in a wave with their combined amplitude. (b) Two waves with the same am-
plitude and frequency cancel each other when their relative phase is an even multiple of 𝝅. (c) The
different waves have different frequencies with random relative phases between, and consequently the
resulting wave is polychromatic. If we consider a large number of waves, it can be said that the result-
ing wave intensity (and not the amplitude) is given by the sum of the original waves intensities.

13
assessed by measuring the scattering angle 2𝜃 and then used to infer the relative spa-
tial distribution of the scattering volumes.
According to Bohr’s (and quantum) atomic model, electrons in atoms orbit around the
nucleus in discrete energy levels. When excited by an incoming X-ray wave, all the
electrons of the atom scatter with different phases, giving rise to constructive and de-
structive interference of waves. In practise, the scattering from an atom is expressed by
means of the atomic form factor 𝑓0(𝑸) that represents the ratio between the amplitude
scattered by an atom and a single electron, defined as
𝑓0(𝑸) = ∫𝜌𝑒𝑙(𝒓) e𝐢𝑸∙𝒓d𝒓 (2.13)
In equation (2.13), 𝜌𝑒𝑙(𝒓) represents the electron density of the atom at a position 𝒓, and
e𝐢𝑸∙𝒓 the phase factor associated with the total phase-shift experienced by an incoming
wave as defined in (2.9). The concept of atomic form factor can be extended to more
complex systems such as molecules or crystals and can also include the so called dis-
persion corrections to model absorption/resonant scattering events. The equation (2.11)
may also be interpreted as the Fourier transform of the atom electron density in polar
coordinates.
In practise, the scattering from a single atom or a molecule is too weak to be recorded
with conventional radiation sources (with the exception of new generation free-
electron lasers (FEL)). In a typical X-ray scattering experiment (SAXS or WAXS) one
illuminates a sample consisting of multiple atoms or molecules, with a monochromatic
(b)
(c)
(a)
Figure 2.3: Conditions for constructive interference of waves scattered from two different points. (a) an
incoming wave with wave vector 𝒌𝐢𝐧 is scattered in two points distant from each other by a position
vector 𝒓. The difference between propagation paths determines the phase-difference between the scat-
tered waves. (b) The scattered wave has maximum intensity in a preferential direction defined by the
wavelength, incoming angle and distance between the scatterers. (c) Scattering resulting from incoher-
ent interference still occurs in all directions but the wave intensity is considerably weaker in such cas-
es.

14
and low divergent beam. The X-ray beam is then scattered by the sample and its inten-
sity recorded on a two-dimensional, position sensitive detector. The scattering occurs
in all directions depending on the beam polarization and relative orientation of the
atoms. For this reason and for isotropic samples, the scattering signal is averaged azi-
muthally and represents the average scattered intensity as function of scattering vector,
or in other words, the form factor of the sample.
The condition for maximum intensity, of the scattered wave, occurs whenever the
phase difference between two waves interfering is 0 or an integer multiple of 2𝜋. If we
take Figure 2.3 as example, considering the scattering volumes as atoms in a crystalline
lattice instead of electrons in an atom, the scatter-ing vector can be used to determine
the interplanar distance 𝑑 between the lattice planes of a crystal. The Bragg’s law for
crystalline diffraction can be deduced from equation (2.11) imposing a total phase shift
of 𝑛 ∙ 2𝜋, where 𝑛 is a positive integer number and taking 𝑟 = 𝑑:
2𝑑 sin(𝜃) = 𝑛𝜆. (2.14)
Unit cell form factor
Lattice sum
(a) (b) (c)
Figure 2.5: Scattering from an atom (a), molecule (b) and crystal (c) and respective form factors. In (b) 𝒋
represents the index of an atom in the molecule and in (c) 𝒍 represents the index of a molecule (or unit
cell) in the crystal lattice. In a crystal structure the scattering is stronger in a direction defined by the
distance between crystallographic planes in the lattice.
Figure 2.4: Data acquisition setup for SAXS and WAXS measurements. A monochromatic X-ray beam
illuminates an isotropic sample of monodisperse spheres (example sample). The beam is scattered at
low angles into a detector that measures its intensity. The typical SAXS and WAXS signals are analysed
after an azimuthal average of the recorded intensity values. In this example, the resulting graph (on the
right) represents the form factor of the spheres with a characteristic radius.

15
2.3 Absorption X-ray scattering can also be inelastic, meaning that the scattering phenomenon is fol-
lowed by a decrease in energy of the primary incident beam. In this case, some photons
transfer their momentum (or energy) to the electrons of a sample material in a process
known as absorption. The electrons of all materials have discrete energy levels that are
governed by quantum mechanics rules, and respond to the excitation driving force in
different ways depending on the energy of the incident beam. The relationship be-
tween the electron and photon energy is further discussed in 2.4 when describing the
X-ray fluorescence effect. In any case, all (real) materials offer some opposition to the
incoming radiation. The reductions in scattering length and intensity are quantified in
the scattering form factors by including an additional complex term to describe the so
called dispersion corrections. The real part is related to refraction and the imaginary
part to absorption. Macroscopically, the attenuation of X-ray intensity due to absorp-
tion through a uniform material follows an exponential decay with a characteristic lin-
ear attenuation length. Quantitatively, the beam intensity 𝐼(𝑧) can be expressed by the
Beer-Lambert attenuation law as
𝐼(𝑧) = 𝐼0e−𝜇𝑧, (2.15)
where 𝐼0 = 𝐼(𝑧 = 0), 𝑧 is the propagation depth and 𝜇 the linear absorption coefficient‡
which in turn depends on the incoming photon energy, the average material atomic
number and density. The intensity of an X-ray beam, here defined as the number of
photon counts recorded in a detector per second is proportional to the squared ampli-
tude of the X-rays electric field (times the detector area and the speed of light) 𝐼(𝒓, 𝑡) ∝
|𝑬(𝒓, 𝑡)|2.
‡ The symbol 𝜇 is also widely used in the literature to denote the mass absorption coefficient
defined as 𝜇/𝜌.
Sample
Slope =
Figure 2.6: Intensity attenuation due to absorption from a homogeneous sample with absorption coeffi-
cient 𝝁

16
2.4 Refraction X-rays, as any other form of waves, experience refraction when changing its propaga-
tion medium. The phenomenon of refraction is characterized by a change in the wave’s
phase velocity (or wavelength if preferred) at the interface between two media without
any change in its frequency or energy. For a given incident angle 𝛼 on an interface,
EMR changes its propagation direction as formulated by the law of refraction, general-
ly known as Snell’s law. Snell’s law relates the incident angle 𝛼 and refracted angle 𝛼′
as illustrated in Figure 2.7 with the refractive index of a medium/material 𝑛 by:
𝑛1 sin(𝛼) = 𝑛2 sin(𝛼′). (2.16)
The refractive index 𝑛 is a dimensionless number that relates the propagation speed or
phase velocity of a wave with the speed of light in vacuum by 𝑛 = 𝑐 𝑣𝑝⁄ . In the X-ray
regime the refractive indices of most materials are smaller than but very close to 1. As a
consequence, the phase velocity, but not the group velocity, of the wave is larger than
𝑐§ which leads to significant differences in refractive behaviour between visible light
and X-rays. The small deviations of 𝑛 from unity for X-rays, in contrast to visible light,
make it harder for the fabrication of lenses, although focusing optics such compound
refractive lenses (CRLs) exist. Alternatively, X-ray beams may be focused by Kirkpat-
rick-Baez (KB) mirrors by reflecting them at grazing incident conditions off a curved
surface, or by means of diffractive optics such as Fresnel zone plates.
The refractive index 𝑛 may also be expressed in terms of its decrement from unity (ref-
erence in vacuum), and take complex values to account for absorption:
§ This statement does not contradict the laws of relativity that state that signals carrying infor-
mation do not travel faster than 𝑐. The signal information moves with the wave group velocity
and not phase velocity, which is in all cases is smaller than 𝑐.
(a) (b)
Figure 2.7: Change in propagation direction of an incident wave due to refraction between vacuum (𝒏𝟏)
and a given medium (𝒏𝟐). For visible light (a) the rays are refracted towards the normal of the interface
while for X-rays (b) they are refracted away from it. The refractive angles for X-rays are often very small
and are exaggerated here for clarity purposes.

𝑛 = 1 − 𝛿 + 𝐢𝛽. (2.17)
For a uniform homogeneous material, the real part of the refractive index decrement 𝛿,
that describes refraction, relates to the sample electron density 𝜌𝑒𝑙 by
𝛿 =𝜌𝑒𝑙𝑟0𝜆
2
2𝜋, (2.18)
whereas the imaginary decrement 𝛽 relates to the sample’s mass density or to the line-
ar absorption coefficient 𝜇 as
𝛽 =𝜇𝜆
4𝜋. (2.19)
In (2.18) 𝑟0 = 2.82 × 10−5 Å is the Thomson scattering length or classical electron radi-
us. The formulation in (2.17) is very convenient for the description of attenuation and
phase shift of X-ray beams through materials, especially those generated from coherent
sources. In a coherent X-ray beam, all photons that constitute a ray are in phase at a
given point in space and the phase difference between rays have definite values which
are constant with time. To the different points in space of a wave with similar phases
we give the name of wavefront. For simplicity let us consider the case of a plane wave-
front for the description of the electric field of the X-ray beam as in equation (2.5) and
its interaction with a uniform homogeneous material. In Figure 2.8 an incoming wave-
front 𝜓in refracts in a sample with refractive index 𝑛 and experiences an attenuation
Phase-shift
Absorption decreasesamplitude
Sample
Figure 2.8: An incoming wave with wave number 𝒌 and propagation direction 𝒓 is refracted by a uni-form material with refractive index 𝒏. For simplicity the incident and refractive angles are the same in
this case. When exiting the sample the wave has the same wavelength and frequency as the incom17in g
wave but with a phase-shift (due to refraction) and smaller amplitude (due to absorption).

18
and phase shift Δ𝜙 according to
𝜓out = 𝜓inexp[−𝐢�� ∙ ∫(1 − 𝑛) 𝑑�� ]. (2.20)
If preferred, equation (2.20) may be re-written in terms of the decrements from the re-
fractive index which better illustrate the absorption and phase-shift of the incoming
wave. In this case,
𝜓out = 𝜓inexp[−𝑘 ∫𝛽d𝑧] exp[−𝐢𝑘 ∫ 𝛿d𝑧]. (2.21)
We could say that the sample acts as a modulator of the incoming wavefront providing
two different types of contrast; one related to refraction and the electron density of the
materials, and other related to absorption from where the mass density of a sample can
be inferred. However, the intensity of the exit wave |𝜓out|2 is independent of its phase
and its expression is reduced to the Beer-Lambert attenuation law.
2.5 The photoelectric effect and fluorescence emission While describing X-ray scattering I mentioned that when accelerated, an electron emits
electromagnetic radiation. Coherent and incoherent scattering are for this reason re-
sponsible alone for the emission of X-rays that are usually observed as a background
signal in experimental X-ray fluorescence (XRF) measurements. However, when speak-
ing about X-ray fluorescence, one usually refers to the emission of characteristic lines
or peaks in the spectra caused by an electron transition between energy levels in an
atom.
The electron orbitals of an atom are distributed in discrete energy levels with higher
KL
Incident Photon
Scattered Photon(Inelastic)
Ejected electron
Electron transition
KL
Ejected Auger Electron
Photon emission (X-ray)
Figure 2.9: Illustration of an inelastic scattering event by a single photon with the ejection of an
elec-tron from a K shell. The created electron vacancy is filled by other electron from an outer energy
shell (L). The filling of the inner shell vacancy is accompanied by a release of energy from the atom,
mostly in the form of a characteristic X-ray photon but it may also involve the emission of a secondary
electron from an outer shell known as an Auger electron.

19
energies closer to the nucleus. If the energy of an incident X-ray photon matches or is
higher than the one of the electron, it may cause it to be expelled from its orbital. When
an electron from an inner shell gets expelled, the atomic configuration gets unstable
and in order to restore its previous equilibrium state, an electron from one of the
at-om’s outer shells falls into the inner electron vacancy (see Figure 2.9). This
transition between energy levels is followed by the emission of a photon, the energy of
which is defined by the difference in energy between the orbitals and is often
within the X-ray spectrum. As all elements have a unique set of energy levels, the
energy of the emitted photon is characteristic of each element and may be used for its
identifica-tion and quantification of its concentration. For this reason fluorescence X-
rays are also known as characteristic X-rays. Some of the most energetic
transitions, allowed by quantum mechanics, are illustrated in Figure 2.10.
When illuminated by a high energetic X-ray beam, a sample material consisting of mul-
K LM
K
L
M
Figure 2.10: Representation of a sulphur atom, according to the Bohr model, and the distribution of its
electrons over different energy shells (K, L, M,…). On the right, the diagram shows some of the most
energetic (and allowed) electron transitions. An electron “jumping” from the L to the K orbital emits a
photon with characteristic energy given by 𝐊𝜶.
Figure 2.11: X-ray fluorescence spectrum of a thin film of kesterite precursors acquired over a 𝟑 × 𝟐 𝛍𝐦
area with a primary beam energy of 10.72 keV. The measured spectra can be seen as a superposition of
different elemental peaks that constitute the sample, with a continuous background and an elastic
scattering signal.

20
tiple elements emits a continuum background X-ray spectra superimposed by a set of
characteristic peaks, which energy and intensity are defined by a specific element con-
centration in the sample. The emitted photons and ejected electrons can further excite
other electrons from the same or neighbouring atoms giving rise to a cascade of lower
energy fluorescence events (detected as a background spectrum) and to the emission of
Auger electrons (from the outer energy shells).
2.6 Diffraction and Free-space propagation So far I have introduced the major forms of X-ray-matter interaction briefly mentioning
the effects of constructive and destructive interference of waves. In fact, X-rays as any
other form of waves, may interact with itself in a process known as interference. For
monochromatic and coherent radiation it is possible to derive expressions that approx-
imate the phase and intensity propagation of X-rays in free-space (vacuum) over its
propagation direction. These, together with models of the type of (2.21) set the basis for
X-ray phase-contrast imaging methods such as near-field holography or far-field co-
herent diffraction imaging (CDI). While (2.21) models the propagation of an X-ray
wave field through a sample material, free-space propagation methods yield a relation-
ship between the wave field propagation between the sample exit-surface and the de-
tector plane at a relative distance.
The most rigorous model for propagation of X-rays is perhaps given by Kirchhoff’s
integral theorem. Kirchhoff used the Huygens principle of superposition of waves,
together with the Green’s identities to derive a solution for the homogeneous wave
equation at an arbitrary point in space, given the solution for the wave equation at a
reference plane and its first order derivative in all points of an arbitrary surface that
encloses that point. I found Kirchhoff’s derivation of the wave propagation equation
somehow too extensive for its purpose in this thesis, but it might be relevant to note
that some assumptions made by Fresnel to derive the Huygens-Fresnel diffraction
equation appear naturally using Kirchhoff’s method.
Before Kirchhoff, Fresnel had already proposed a solution to the wave propagation
equation under certain approximations, which limits its validity to a propagation re-
gion known as near-field (defined below). Fresnel showed that the Huygens principle
of superposition of waves together with his theory of interference could be used to
formulate the propagation equation. The Huygens’s principle states that all points of a
wavefront can be seen as new (or secondary) sources of wavelets that propagate in all
directions (see Figure 2.12). It also says that the propagation speed from the wavelets is
the same in all directions, meaning that any wavefront can be described by the super-
position of spherical wavelets with a phase term e𝑖𝒌 ∙𝒓 and an amplitude that decays

21
linearly with a propagation distance 𝑟 from its origin. For a monochromatic coherent
wavefront and according to the coordinate system in Figure 2.12, the electric field 𝐸 at
a point (𝑥′, 𝑦′, 𝑧) is found by
𝐸(𝑥′, 𝑦′, 𝑧) =1
𝐢𝜆∬ 𝐸(𝑥, 𝑦, 0)
e𝐢𝒌 ∙𝒓
𝑟d𝑥d𝑦
+∞
−∞ (2.22)
Analytical solutions for the integral in (2.22) are only feasible for simple geometries
and for that reason numerical calculations are often preferred to describe more com-
plex systems. The difficulty associated with the integral in (2.22) arises from the ex-
pression of 𝑟, that in turn represents the propagation distance between a point with
coordinates (𝑥, 𝑦, 0) and other of coordinates (𝑥′, 𝑦′, 𝑧) . For a spherical wavelet:
𝑟 = √(𝑥′ − 𝑥)2 + (𝑦′ − 𝑦)2 + 𝑧2, or if preferred for notation clarity, 𝑟 = √𝑢2 + 𝑧2, where
𝑢 = √(𝑥′ − 𝑥)2 + (𝑦′ − 𝑦)2. The simplicity of Fresnel approximation comes from only
considering the first two terms of a Taylor series expansion of 𝑟. Naturally, the validity
of this approximation breaks down when the contributions from the third term (or
higher) become significant. The first terms of the Taylor expansion of 𝑟 are
𝑟 = 𝑧 +𝑢2
2𝑧−
𝑢4
8𝑧3+
𝑢6
16𝑧5+⋯ (2.23)
The third term of (2.23) is considered to be “small” when its value is much smaller than
the wavelength of the wave 𝜆, as 𝑢4
8𝑧3≪ 𝜆. Propagation distances where this assumption
holds true are said to be in the near-field. Alternatively this condition is more often
𝑟
𝑧
𝑦′
𝑥′𝑦
𝑥
Figure 2.12: On the left: The Young’s single slit experiment illustrates the Huygens’s principle. All
points of the incoming wave can be seen as a new source of spherical wavelets (here represented only
at the location of the slit). This phenomenon explains for example the principle of diffraction, or the
bending of light/X-rays when passing through an opening. The wavefront after the opening or slit can
be seen as the superposition of the spherical wavelets emanating from the slit. On the right: Coordinate
system for free-space propagation of X-rays used in the derivations below.

22
written in terms of the dimensionless Fresnel number 𝐹, originally introduced in the
context of a beam passing through an aperture, defined as
𝐹 =𝑎2
𝜆𝑧. (2.24)
Here (in 2.24), 𝑎 represents the characteristic size (for example radius or diameter) of
the aperture where the wavefront emanates from. In practise, during a CDI experi-
ment, 𝑧 represents the distance between the sample and the detector plane, whereas 𝑎
is associated with the illumination focus (or probe) size at the sample plane.
When 𝐹 ≈ 1 (or slightly larger), the Fresnel approximation works well and can be used
to model free-space propagation of waves in the near field. For “high” propagation
distances, when 𝐹 ≪ 1, the quadratic terms of the phase variation (associated with the
second term in 2.31) may also be neglected which provide a simpler formulation for
Fraunhofer diffraction.
Near-field or Fresnel Diffraction
The Fresnel diffraction integral, valid for near-field propagation, results from equation
(2.22) under the approximation 𝑟 ≈ 𝑧 +(𝑥′−𝑥)
2+(𝑦′−𝑦)
2
2𝑧 for the phase term and 𝑟 ≈ 𝑧 in
the denominator:
𝐸(𝑥′, 𝑦′, 𝑧) =e𝐢𝑘𝑧
𝐢𝜆𝑧∬ 𝐸(𝑥, 𝑦, 0)e
𝐢𝑘
2𝑧[(𝑥′−𝑥)
2+(𝑦′−𝑦)
2]d𝑥d𝑦
+∞
−∞. (2.25)
Alternatively, the integral in (2.25) may be expressed in terms of a convolution. This is
especially convenient for numerical implementations where the Fourier convolution
theorem can be used to simplify, and accelerate its computation. The convolution and
convolution kernel/function ℎ are then
𝐸(𝑥′, 𝑦′, 𝑧) = 𝐸(𝑥, 𝑦, 0) ⋆ ℎ(𝑥′, 𝑦′, 𝑧), (2.26)
ℎ(𝑥′, 𝑦′, 𝑧) =e𝐢𝑘𝑧
𝐢𝜆𝑧e𝐢
𝑘
2𝑧(𝑥′2+𝑦′2). (2.27)
According to the Fourier convolution theorem, under certain (boundary) conditions, a
convolution can be expressed by a simple multiplication between Fourier transforms,
𝐸(𝑥′, 𝑦′, 𝑧) = ℱ−1{ℱ{𝐸(𝑥, 𝑦, 0)}ℱ{ℎ(𝑥′, 𝑦′, 𝑧)}}, (2.28)
where ℱ and ℱ−1 represent respectively the two-dimensional Fourier transform opera-
tor and its inverse.

23
Far-field or Fraunhofer Diffraction
For small Fresnel numbers, 𝐹 ≪ 1, the approximation of 𝑟 may be even further re-
duced. In the far-field or Fraunhofer regime, the propagation distance 𝑧 and the coor-
dinates at the detector plane (𝑥′, 𝑦′) are often very larger when compared to the aper-
ture or illumination size. Consequently the quadratic terms in (2.25) associated with the
small dimensions (𝑥2 and 𝑦2 ) can be neglected when compared to 𝑥2 and 𝑥′𝑥 (and
analogously for 𝑦):
(𝑥′ − 𝑥)2 = 𝑥′2 + 𝑥2 + 2𝑥′𝑥 ≈ 𝑥′2 + 2𝑥′𝑥, (2.29)
(𝑦′ − 𝑦)2 = 𝑦′2 + 𝑦2 + 2𝑦′𝑦 ≈ 𝑦′2 + 2𝑦′𝑦. (2.30)
Under these approximations, the Fresnel diffraction formula takes the form
𝐸(𝑥′, 𝑦′, 𝑧) =e𝐢𝑘𝑧
𝐢𝜆𝑧∬ 𝐸(𝑥, 𝑦, 0)e
𝐢𝑘
2𝑧[𝑥′2−2𝑥′𝑥+𝑦′2−2𝑦′𝑦]d𝑥d𝑦
+∞
−∞, (2.31)
which under the substitution 𝑘 =2𝜋
𝜆 can in turn be rearranged as
𝐸(𝑥′, 𝑦′, 𝑧) =e𝐢𝑘𝑧
𝐢𝜆𝑧e𝐢𝑘
2𝑧(𝑥′2+𝑦′2)
∬ 𝐸(𝑥, 𝑦, 0)e−2𝜋𝐢[𝑥
𝑥′
𝜆𝑧+𝑦
𝑦′
𝜆𝑧]d𝑥d𝑦
+∞
−∞. (2.32)
In this case, the integrals in (2.32) represents the two-dimensional Fourier transform of
the wave equation at the reference plane 𝑧 = 0, with reciprocal space coordinates
(𝑥′
𝜆𝑧,𝑦′
𝜆𝑧). Therefore, for parallel (under paraxial conditions), coherent and monochro-
matic X-ray beams a diffraction pattern recorded in the far-field can be approximated
by the Fourier transform of the wavefront after exiting a sample up to a constant com-
plex term (constant phase and slight intensity attenuation). This assumes naturally that
there are neither additional obstructions nor optics between the sample and the detec-
tor plane.
Note on fractional Fourier transforms
The relationship between free-space propagation of coherent waves and the Fourier
transform is a key idea that is largely exploited during the analysis of diffraction phe-
nomena. More advanced descriptions, relying for example on the fractional Fourier
transform, may also be used for modelling free-space propagation of X-rays and are
not limited to a validity region such as the near-field or far-field [10]–[12].

24
3. X-ray imaging techniques“If the hand be held between the discharge-tube and the screen, the darker shadow of the
bones is seen within the slightly dark shadow-image of the hand itself… For brevity’s
sake I shall use the expression “rays”; and to distinguish them from others of this name
I shall call them “X-rays”.
Wilhelm Röntgen
X-ray imaging techniques exploit the X-rays ability to pass through different objects to
record a real-space image revealing their internal structure, the contrast of which is
defined by the density, thickness and type of materials being illuminated.
There are several different ways one could classify the different techniques, based on
the type of illumination (coherent vs non-coherent), beam geometry (parallel, cone or
line beam), contrast (absorption vs phase-contrast), energy (soft X-rays vs hard X-rays),
among others… As most of my work has been focused on X-ray scanning techniques it
seemed natural to divide this chapter into full-field and scanning imaging methods.
Full-field and scanning imaging methods are distinguished by the relationship be-
tween the illumination and sample sizes. In full-field imaging the incident beam is
larger than the sample, whereas in scanning microscopy, a small (focused) but intense
beam scans the sample in different locations. At each position of the scan, an X-ray sig-
nal, such as absorption, diffraction, or X-ray fluorescence is recorded and a single im-
age is then reconstructed by ‘stitching’ the different measurements together.
3.1 Full-field imaging methods
X-ray absorption imaging
Full-field X-ray absorption imaging dates back to the late 19th century and it is likely to
be the most well-known type of X-ray imaging, widely spread for example in the med-
ical community. In this case, a sample is fully illuminated by an X-ray beam which is
attenuated depending on the X-rays and the sample properties, according to the ex-
pression (2.13). An X-ray detector or film/plate placed after the sample records the X-
ray intensities after absorption, the variations of which define the image contrast. The
detector plane is often placed relatively close to the sample in order to minimize any
possible diffraction events. For this reason, the recorded image contrast is proportional
to the measured intensity of the beam only, whereas the X-ray phase does not play a
considerable role in the process. This fact alleviates the requirements for coherent X-ray

25
sources, which are often only practically available in large-scale facilities such as syn-
chrotrons.
Despite its simplicity, the acquired radiographs or projection images are commonly
affected by constant background noise or fluctuations that limit their overall quality.
There are many sources for such intensity variations, which include for example varia-
tions in intensity of the beam itself, different performance of the detector pixels and
even the presence of dust in the detector screen. If the projection images are recorded
digitally, the background noise can easily be reduced by applying a flat field correction
that I found worth noticing. In conventional X-ray flat field correction, a set of three
images are recorded during data acquisition. These include the already mentioned pro-
jection (X-ray beam and sample) 𝐼𝑝, the flat field projection 𝐼0 and the dark field projec-
tion 𝐼𝐷 recorded without the sample, with and without beam, respectively. A new ra-
diograph 𝐼𝑁 is then generated by normalizing 𝐼𝑝 as follows,
𝐼𝑁 =𝐼𝑝−𝐼𝐷
𝐼0−𝐼𝐷. (3.1)
Quantitative evaluation of the sample’s linear absorption coefficient 𝜇, at each pixel of
the recorded image is possible under certain conditions. First, 𝜇 depends not only on
the material properties but also on the energy of the incoming radiation. For this rea-
son, polychromatic or white beams have wavelength/energy-dependent attenuations
and the calculated 𝜇 represents an average quantity weighted by the incoming illumi-
nation spectrum. Second, if the object is composed by different materials or includes
voids, their different contributions are superimposed into a single projection image, a
problem that can be solved by means of tomographic principles as it is later discussed.
Measured Radiograph Corrected RadiographFlat Field
Figure 3.1: Flat field correction of a full field X-ray absorption radiograph. The measured radiograph (at
the centre) is heavily contaminated by a constant background as seen in the flat field image. The dark
field image of this set of measurements was omitted here due to its lack of contrast and absence of
features visible to the naked eye. The resulting radiograph after flat field correction is represented at
the right.

26
Having this in mind, 𝐼𝑁 relates linearly to 𝜇 and the local sample thickness by a nega-
tive logarithmic transformation,
∫𝜇d𝑧 = − log 𝐼𝑁. (3.2)
Coherent Diffraction Imaging
Coherent diffraction (or diffractive) imaging (CDI) techniques rely on both intensity
and phase variations of the X-ray beam when passing through a sample to generate a
complex transmission image of the sample system. In order to keep track of phase
changes of the incoming beam, one often exploits phase-dependent phenomena such as
interference or diffraction which set the requirements for coherent radiation. In CDI, a
coherent X-ray beam is absorbed and refracted by the sample system according to
equation (2.18) before being propagated downstream onto a detector in the near- or far-
field. There are different types of experimental setups one can use, but in general no
optics such as an objective lens are used between the sample and the detector planes.
This comes with the advantage that the final image resolution is not affected by lenses
aberration but is only diffraction (and dose) limited.
The resulting diffraction pattern is recorded by an X-ray detector that measures the
wavefront intensity whereas any information about the phase of the beam is lost. The
diffraction pattern is a representation of the reciprocal space of the sample and must be
inverted to form a real space image. This could be accomplished for example by using
an objective lens after the sample so that a real space image is formed in the detector
plane. However, X-ray detectors are only able to measure X-ray intensities and thus the
real space image formed by a lens would still only be representative of the absorption
properties of the sample. To the loss of information concerning the phase of a wave-
front (upon detection) we assign the name of phase problem.
Effectively, CDI phase retrieval algorithms replace the purpose of the objective lens by
recovering the unknown phase numerically using an iterative approach based on some
type of optimization problem. From the different methods for phase retrieval proposed
in the literature, I highlight the most commonly used based on the pioneering work by
Gerchberg and Saxton [13] and Fienup [14]. Although most of the following deriva-
tions model the free-space propagation from a sample to the detector plane by a Fouri-
er transform (far-field) the same concepts can be used in the near-field by replacing the
Fourier transform operator by a Fresnel propagator (and its inverse) as in equation
(2.26).

27
Both Gerchberg and Saxton and Fienup proposed the use of an iterative update scheme
that simply alternates between reciprocal/Fourier and real space enforcing a priori con-
straints in both domains. Besides the measured modulus of the Fourier transform of an
“object”, Gerchberg and Saxton approach rely on intensity measurements of the object
in the imaging plane, while Fienup’s error-reduction algorithm (ER) exploits other con-
straints such as non-negativity and the existence of a support function for the object.
The support function of an object is the subset of the object domain that contains all the
non-zero elements and can be directly estimated from the autocorrelation function of
the object that in turn can be computed from the measured Fourier modulus without
any knowledge of the phase.
Phase Retrieval in CDI
From equation (2.18) and (2.27), it is seen that for monochromatic coherent radiation at
the far field the measured intensities are proportional (up to a constant factor) to the
square modulus of the Fourier transform of the refracted wave as
𝐼meas ∝ |ℱ{𝜓out}|2. (3.3)
In most CDI techniques, the object (sample) is assumed to be represented by a “thin”
complex transmission function. In other words, the object 𝑂 is responsible for changing
the phase and amplitude of the incident illumination function or probe 𝑃 whereas no
propagation effects through the thickness of the object are accounted for. In this case,
under the “thin object” condition, the interaction between the object and probe func-
tion can be approximated by a simple multiplicative relation so that
𝜓out(𝑥, 𝑦) = 𝑃 × 𝑂, (3.4)
𝑃(𝑥, 𝑦) = 𝜓in(𝑥, 𝑦), (3.5)
𝑂(𝑥, 𝑦) = exp[−𝐢𝑘 ∙ ∫(1 − 𝑛(𝑥, 𝑦, 𝑧)) 𝑑𝑧], (3.6)
where 𝑧 is the propagation direction. Phase retrieval algorithms are able to recover the
missing phase information and return an estimate of the exit wavefront 𝜓out that ac-
cording to (3.4) superimposes both the object and probe function. For this reason, in
full-field CDI, a plane wavefront is often used so that the effect of the probe function
can be reduced to a complex constant term in the exit wave and the reconstructed im-
age is considered to be the only representative of the object. In practice, this imposes a
limitation in the sizes of the samples to be imaged that must be relatively small when
compared to the X-ray beam size. For relatively large fields-of-view one must rely on
scanning CDI methods such as ptychography which as it will be later discussed in this
thesis.

28
At each iteration of the Gerchberg-Saxton phase-retrieval algorithm, two modulus con-
straints are enforced in both object and Fourier domains. This is done by replacing the
amplitudes of the wavefront 𝜓 and its Fourier transform Ψ by the squared-root of the
experimentally measured intensities. In Figure 3.2, these functions are represented by
𝜓′ and Ψ′ respectively. In Fienup’s algorithm, the object modulus constraint is replaced
by a finite-support function 𝑆 in 𝜓 which defines the subset of non-zero values in the
domain of 𝑂. At the 𝑖th iteration, the support constraint may be implemented as fol-
lows,
𝜓′[𝑖+1](𝑥, 𝑦) = {𝜓[𝑖], (𝑥, 𝑦) ∈ 𝑆
0, (𝑥, 𝑦) ∉ 𝑆 . (3.7)
Despite it has been shown that the ER algorithm converges to a solution, which may
not necessarily be the optimal, this phase-retrieval method still suffers from slow con-
vergence. Three different solutions to this problem were suggested later by Fienup in
what are known as the input-output, output-output and the hybrid input-output (HIO)
algorithms. These differ from the ER algorithm in the implementation of the real space
constraints where the support function is replaced by
𝜓′[𝑖+1](𝑥, 𝑦) = {𝜓′[𝑖], (𝑥, 𝑦) ∈ 𝑆
𝜓′[𝑖] − 𝛽𝜓[𝑖], (𝑥, 𝑦) ∉ 𝑆 , (3.8)
for the input-output algorithm. Analogously, the output-output and hybrid input-output
algorithms are respectively implemented as
𝜓′[𝑖+1](𝑥, 𝑦) = {𝜓[𝑖], (𝑥, 𝑦) ∈ 𝑆
𝜓[𝑖] − 𝛽𝜓[𝑖], (𝑥, 𝑦) ∉ 𝑆 , (3.9)
𝜓′[𝑖+1](𝑥, 𝑦) = {𝜓[𝑖], (𝑥, 𝑦) ∈ 𝑆
𝜓′[𝑖] − 𝛽𝜓[𝑖], (𝑥, 𝑦) ∉ 𝑆 . (3.10)
1.
2. Initialize phase with random values between
3.
4.
5. Enforce object constraints in
6.
7.
8. Enforce object constraints
Initialize phase with randomvalues between
Enforce object constraints in
Enforce Fourier constraints in
Loop between 3. and 7. until convergence
Enforce Fourierconstraints
Enforce Object constraints
Figure 3.2: Simplified diagram for (far-field) CDI phase-retrieval. The Gerchberg and Saxton and
Fienup methods distinguish mainly in the type of object constraints to be applied.

29
In expressions (3.8) to (3.10), 𝛽 represents a feedback constant that ranges from 0.5 to 1
(and should not be mistaken for the imaginary part of the refractive index as in chapter
2). The support function itself may be updated at any point of the algorithm, for exam-
ple via the shrink-wrap algorithm.
The convergence of phase-retrieval algorithms may be monitored at each iteration us-
ing, for example, the sum squared error (SSE) between the experimentally measured
intensities and those resulting from the squared Fourier magnitude of the current re-
constructed exit wave Ψ[𝑖], as
𝑆𝑆𝐸[𝑖] =∑ (𝐼meas(𝒒)−|Ψ[𝑖](𝒒)|
2)2
𝒒
∑ (𝐼meas(𝒒))2
𝒒
. (3.11)
Geometric considerations
Contrary to full-field absorption images, the spatial resolution and field-of-view (FOV)
of reconstructed CDI images are defined not only by the detector size and pixel pitch,
but also by the experimental setup itself. At the detector plane, the diffracted wave is
continuous in space but measured discretely at each pixel of the detector. Let us now
consider the simplified experimental setup as represented in Figure 3.4Figure . The
detector of size 𝐷 × 𝐷 is placed at a distance 𝐿 from the sample. Here, for simplicity, I
have only considered the case of square detectors, so that the horizontal and vertical
resolutions (and FOV) of the reconstructed image are the same. If non-square detectors
are used, or if the number of pixels in each dimension is different, the following calcu-
lations should be done independently for each dimension. For the sake of briefness, I
present only the expressions for the reconstructed pixel size and FOV for the 𝑦 dimen-
sion.
Object Function Diffraction Pattern Autocorrelation Reconstructed object
Figure 3.3: Example of a recovered object function from the modulus of its Fourier transform by means
of Fienup’s hybrid input-output phase retrieval algorithm. The diffraction pattern 𝑰𝐦𝐞𝐚𝐬 was generated
using a discrete Fourier transform algorithm. The autocorrelation function can be directly computed
from the measured intensities and used to define a finite support region (represented by dashed-lines).
The reconstructed object is represented on the right for the 2000th iteration.

30
In 1952, Sayre [15] proposed that in order to recover the phase information from a scat-
tering event of a non-crystalline specimen, the acquired diffraction pattern must be
sampled at a frequency higher than twice the Nyquist frequency. This is often referred
to in crystallography as oversampling, since the Nyquist frequency is the minimum fre-
quency at which a signal can be sampled without aliasing, which in turn is equal to
twice the highest frequency of the signal. The term oversampling or double sampling is
still often used and widespread, but as pointed out by Rodenburg [16] and Sayre [15] is
a serious misnomer. The diffraction pattern intensity is not the Fourier transform of the
original exit wave but rather of its autocorrelation. As the maximum extent of an auto-
correlation function is twice of its signal, the diffraction pattern must be sampled with
at least twice as fine steps so that the autocorrelation signal may be recovered.
Let us also consider that the detector has 𝑁 × 𝑁 pixels and that the fast Fourier trans-
form (FFT) algorithm conserves the total amount of pixels, i.e. the object function or
exit wave is represented in a Cartesian grid of 𝑁 × 𝑁 pixels. To ensure that the sam-
pling requirement is fulfilled, the detector must sample the diffraction pattern with
twice as many points as the Nyquist-Shannon criterion requires. As the result of this
oversampling, the reconstructed pixel size 𝑟ps (which may differ from the actual image
resolution) is half of the maximum frequency of the diffraction pattern defined as
2𝜋|𝑄|max⁄ . This way,
𝑟ps =1
2
2𝜋
|𝑄|max, (3.12)
where |𝑄|maxis the maximum 𝑄 vector measured, in this case in the 𝑦 direction. From
the theory of scattering |𝑄| = (4𝜋 𝜆⁄ ) sin(𝜃), which according to Figure 3.4 and the par-
axial approximation can be reduced to
𝑦
𝑥
2𝜃
𝐷
𝐿
𝑄 max
Figure 3.4: Simplified experimental setup for CDI. A coherent incident beam scatters from a sample
with an angle 𝟐𝜽 and reaches a detector of size 𝑫 ×𝑫 placed at a distance 𝒛 = 𝑳 from the sample. The
detector measures the intensity of the scattered (refracted and diffracted) wave.

31
|𝑄| =4𝜋
𝜆sin(𝜃) ≈
4𝜋
𝜆
𝐷
4𝐿=𝜋𝐷
𝜆𝐿, (3.13)
where 𝐿 is the distance from the sample to the detector and 𝐷 the detector size as illus-
trated in Figure 3.4. Whenever all the required conditions are fulfilled, the reconstruct-
ed pixel size is then uniquely defined by the X-rays wavelength and experimental set-
up as
𝑟ps =𝜆𝐿
𝐷. (3.14)
Despite the reconstructed image being represented in a 𝑁 ×𝑁 grid of pixels of (virtual)
size 𝑟ps as a consequence of the sampling criterion, the (valid) field-of-view does not
cover 𝑁 × 𝑟ps pixels in both dimensions, but rather half of it
𝐹𝑂𝑉 =𝑁𝑟ps
2=
𝜆𝐿
2𝑑ps, (3.15)
where 𝑑ps is the detector pixel pitch or size. The oversampling effect in the (valid) field-
of-view of the reconstructed image is illustrated in Figure 3.5 and imposes a maximum
size on the specimen given by expression (3.15). In ptychography, this criterion trans-
lates into a limitation for the illumination function (in the object plane) as it is later dis-
cussed.
Other forms of CDI
In order to overcome some of the limitations imposed by CDI, different experimental
setups can be used. In Fresnel CDI (FCDI) for example, the detector is placed in the
near-field and the incident beam has usually a small divergence angle ~1° − 2°, which
allows larger specimens to be imaged at the cost of spatial resolution. Gabor’s principle
No oversampling With oversampling
Figure 3.5: Implications of oversampling in CDI. If the discrete Fourier transform conserves the total
number of pixels in an image, then oversampling in the Fourier space is mathematically equivalent to
zero-padding in the real space. The two object functions represented above by the CINEMA logo have
the same size i.e. are represented by the same number of pixels (𝑵/𝟐 ×𝑵/𝟐) but the one on the right is
zero-padded to twice its original size. As a consequence its discrete Fourier transform is oversampled
by a factor of 2.

32
of holography may also be exploited for phase-retrieval and image reconstruction,
which is accomplished by mixing the scattered wave with a reference wave. When the
reference wave is the same as the incoming wave the technique is known as in-line
holography [17][16], whereas if the reference wave comes from a pinhole (or other
known source), the technique is known as Fourier transform holography (FTH) [18].
3.2 Scanning imaging methods
Scanning Transmission X-ray microscopy – STXM
Scanning transmission X-ray microscopy (STXM) extends the principles of X-ray ab-
sorption imaging to the microscopic realm. In STXM, a KB-mirror or a zone plate is
used to focus the X-ray beam into a small spot, and the sample is scanned in focus or in
the focal plane. A detector records the transmitted beam intensity that is attenuated in
each scanning point according to expression (2.13). This way, the detected signal is
guaranteed to come from a small area in the sample of the same size as the illumination
focus spot. In full-field absorption imaging the images pixel size matches the detec-
tor’s, while in STXM this is instead given by the step-size between different scanning
positions. The final resolution however strongly depends on the measured scanning
positions uncertainties and the ratio between the illumination size and scanning step-
size. STXM is often used with soft X-rays and in combination with fluorescence spec-
troscopy techniques in studies of biological systems [19], [20].
CDI HolographyFCDI FTH
Specimen Incident beam Scattered beam Pinhole reference beam
Figure 3.6: Different experimental setups in coherent diffraction imaging. In CDI or FCDI, the scattered
beam (after refraction in the sample) interferes with itself and propagates to the far- or near-field. In
holography or FTH the scattered beam interferes with a reference wave that facilitates the phase re-
trieval operation. For illustration purposes the divergence angles of the X-ray beams were exaggerated.

33
When STXM measurements are done with X-ray energies close to one of the sample
element’s characteristic lines or absorption edges, the technique is known as X-ray ab-
sorption near edge structure (XANES) for high-energy/hard X-rays, or as near edge X-
ray absorption fine structure (NEXAFS) for low-energy/soft X-rays.
Probing the same specimen at different energies close to one specific absorption edge is
a good strategy to enhance contrast of STXM images to a specific element as it is shown
as example in Figure 3.7. Different electronic states of a sample (for example, during
charging of a battery or other electrochemical process) are responsible for a small shift
in energy (a few eV) of the refractive indices and therefore, in an analogous way, the
same principle for contrast enhancement can be applied by changing the electronic
state of the sample and keeping the same incoming X-ray energy (near an absorption
edge).
Scanning Coherent Diffraction Imaging – Forward Ptychography
X-ray forward ptychography has its origins in Walter Hoppe’s work in electron diffrac-
tion [21]–[23] between about 1968 and 1973 that was later revised and applied to X-ray
microscopy by Rodenburg [16]. Electrons also display a wave-particle duality, with a
wavelength given by de Broglie’s formula 𝜆𝑒 = h/p and their scattering and diffraction
properties have been widely exploited in the field of electron microscopy.
CZTS
CTS
on-Edge off-Edge
off-edgecontrast
on-edgecontrast
Figure 3.7: Example of contrast enhancement in X-ray absorption imaging by XANES. The plot on the
left shows the imaginary part of the refractive index, related to absorption, of two different materials:
CZTS (Cu2ZnSnS4) and CTS (Cu2SnS3) as function of the incident X-rays energy. CZTS and CTS are
two different phases present in kesterite thin-film photovoltaics that have respectively positive and
negative contributions to the final device performance. They mainly differ in their Zn content that in
turn has an absorption edge (𝑲𝜷-line) around 9560 eV. The two images on the centre and right represent
a matrix of CTS with embedded CZTS circles (assuming a thin/2D sample). Close to/on the Zn absorp-
tion edge the contrast between the two materials is enhanced due to photo-absorption effects (see chap-
ter 2.5) in the Zn electron cloud. Far from the absorption edges the refractive indices are assumed to be
constant (or to vary slowly with energy) and the contrast is reduced as it is illustrated in the image on
the right.

34
Hoppe realized that if Bragg peaks** from crystalline diffraction patterns interfere then
one can obtain information about their relative phase. Bragg peaks at the detector
plane take different and strongly localized positions, and so, in order to enforce inter-
ference, Hoppe suggested the use of coherent illuminations with a finite size instead of
the conventional extended plane waves. This way, the measured diffraction pattern
intensities are convolved with the Fourier transform†† of the probe or illumination
function, and Bragg peaks are guaranteed to interfere as long as the illumination size is
around the same order of magnitude as the unit cell of the crystalline sample. To dis-
tinguish this technique from holography, Hegerl and Hoppe [24] coined the name
‘ptychography’ that derives from the Greek words πτυξ or πτυχή (ptycho = ‘fold’) and
can be translated to the “folding” of different diffraction orders into a single one by
means of the aforementioned convolution. Electron diffraction ptychography remained
somehow dormant and received rather little interest from the scientific community for
almost four decades since its first description from Hoppe. It was not until a while lat-
er, that John Rodenburg reviewed its fundamental principles, applied and further de-
veloped this technique with application to coherent X-ray sources [16], [25]. Different
names have been since then proposed by several authors to distinguish X-ray
ptychography from Hoppe’s original work, and thus references to this technique may
be found in the literature under the names “ptychographic coherent diffraction imag-
ing” [26], “scanning X-ray diffraction microscopy” [27] and/or “ptychographical itera-
tive phase retrieval” [28].
In CDI, the recorded diffraction patterns must be oversampled in order to uniquely re-
trieve the missing phases, which in practice implies that a finite support is known for
the object under investigation [13], [29], [30]. Although phase-retrieval is possible un-
der such conditions, ambiguities in the solution may arise, e.g. related to its complex
conjugate or twin image remain (see chapter 3.3). Hoppe showed that diffraction pat-
terns recorded at two overlapping positions remove the ambiguities between the cor-
rect solution and its complex conjugate besides providing an implicit object support
defined by the illumination size and scanning positions. Consequently, one of the in-
trinsic requirements of ptychography is that adjacent scanning positions must be close
enough so that a significant overlap between the illuminated areas of the object is en-
sured.
** Scattered radiation from Bragg conditions i.e. Bragg peaks are by definition coherent and al-
lows for interference phenomena. †† According to the convolution theorem, the Fourier transform of a point-wise multiplication
between two functions (object and probe in this case) equals the convolution of their respective
Fourier transforms.
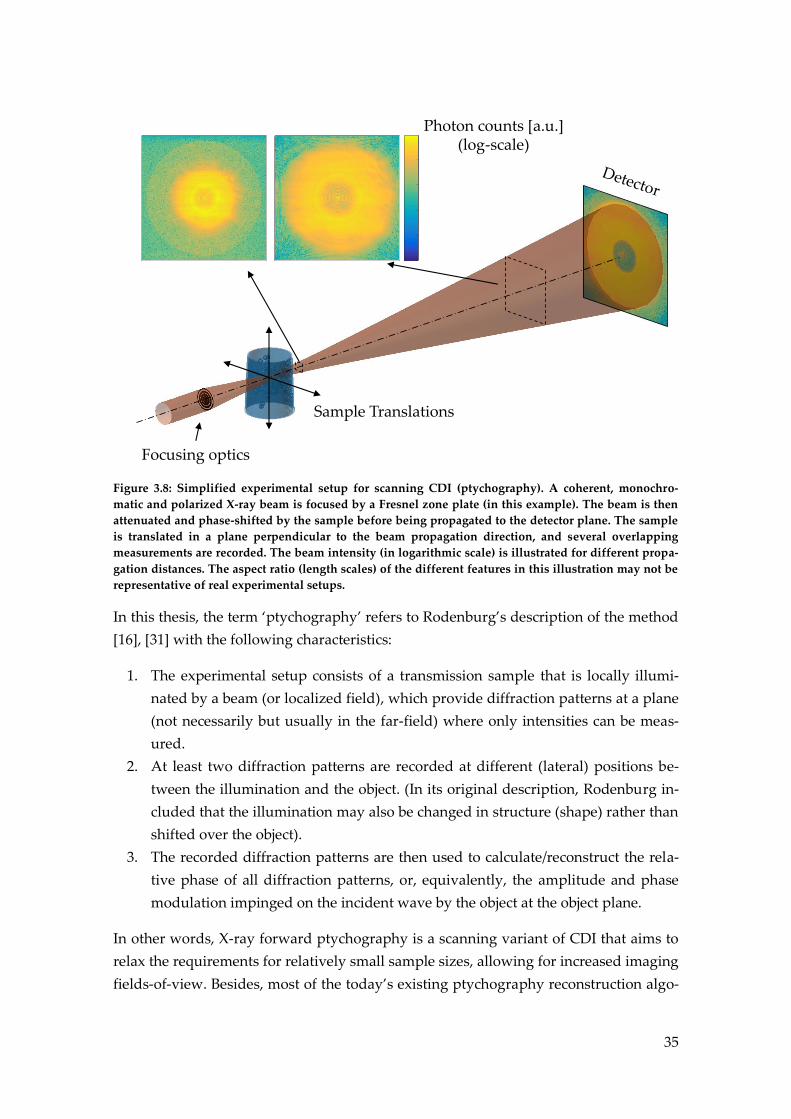
35
In this thesis, the term ‘ptychography’ refers to Rodenburg’s description of the method
[16], [31] with the following characteristics:
1. The experimental setup consists of a transmission sample that is locally illumi-
nated by a beam (or localized field), which provide diffraction patterns at a plane
(not necessarily but usually in the far-field) where only intensities can be meas-
ured.
2. At least two diffraction patterns are recorded at different (lateral) positions be-
tween the illumination and the object. (In its original description, Rodenburg in-
cluded that the illumination may also be changed in structure (shape) rather than
shifted over the object).
3. The recorded diffraction patterns are then used to calculate/reconstruct the rela-
tive phase of all diffraction patterns, or, equivalently, the amplitude and phase
modulation impinged on the incident wave by the object at the object plane.
In other words, X-ray forward ptychography is a scanning variant of CDI that aims to
relax the requirements for relatively small sample sizes, allowing for increased imaging
fields-of-view. Besides, most of the today’s existing ptychography reconstruction algo-
Focusing optics
Sample Translations
Photon counts [a.u.] (log-scale)
Figure 3.8: Simplified experimental setup for scanning CDI (ptychography). A coherent, monochro-
matic and polarized X-ray beam is focused by a Fresnel zone plate (in this example). The beam is then
attenuated and phase-shifted by the sample before being propagated to the detector plane. The sample
is translated in a plane perpendicular to the beam propagation direction, and several overlapping
measurements are recorded. The beam intensity (in logarithmic scale) is illustrated for different propa-
gation distances. The aspect ratio (length scales) of the different features in this illustration may not be
representative of real experimental setups.

36
rithms recover simultaneously not only the object (expression (3.6)) but also the illumi-
nation or probe function (expression (3.5)) which facilitates data acquisition and allows
the use of a variety of diffractive optics for focusing the beam.
The fundamental principles of ptychography are analogous to those of CDI, i.e. the
reconstructed image contrast is given by both intensity and phase modulations of the
incoming wave front according to expression (2.18) and the exit wave is propagated in
free-space to the detector plane that measures its intensity. Before illuminating the
sample, the incoming beam passes through a pinhole or is focused by some type of X-
ray optics that defines the incoming illumination properties, such as size, intensity and
phase. At the sample plane, the electric field of the incoming wave front is defined by
𝜓in or for notation purposes by 𝑃 (as in expression 3.5)). The sample is then translated
in a plane perpendicular to the X-ray beam propagation direction, and different inten-
sity measurements (in the far-field) are recorded at different scanning positions. X-ray
ptychography is not necessarily performed in the focal plane where the illumination
size is small, but often slightly out of focus so that the illuminated area of the object is
large and the number of scanning points can be reduced.
Phase Retrieval in X-ray ptychography
Since its inception by Hoppe, several reconstruction algorithms have been suggested
by different authors to recover the relative phase between diffraction patterns from
adjacent scanning positions. The first ptychographic technique which yielded recon-
structions of non-crystalline specimens was introduced by Bates and Rodenburg and is
known as Wigner-distribution deconvolution [32], [33]. Although this method provides
a closed-form solution to the phase-retrieval problem, it has not been extensively used
besides from some proof-of-principle experiments, mainly due to its high sampling
requirements which limit its practical implementation. For this reason, and since many
different methods (and/or variants) are available in the literature, I introduce only two
of the most predominant iterative algorithms commonly known as Ptychographical
Iterative Engine (PIE) and Difference Map (DM).
Ptychographic Iterative Engine (PIE)
The first iterative algorithm for ptychographical reconstructions was proposed by
Faulkner and Rodenburg (2004) and is known as Ptychographical Iterative Engine PIE
[28], [34], [35]. The PIE algorithm assumes a perfect knowledge of both amplitude and
phase of the two-dimensional probe function, which may be bandwidth-limited, have
infinite spatial extent and/or soft edges [36]. Besides the known probe function and
measured diffraction intensities, the PIE algorithm takes as input an arbitrary guess for
the object function 𝑂[0] that is updated at each iteration according to the following
steps [34], [35]. Assuming the forward model

37
𝐼𝑗(𝒒) = |ℱ{𝑃(𝒓 − 𝑹𝑗) ∙ 𝑂(𝒓)}|2, (3.16)
at the 𝑖th iteration, a new guess of the exit wave 𝜓𝑗[𝑖] is calculated from the current
guess of the object 𝑂[𝑖](𝒓), and the probe function 𝑃 shifted to the scanning position 𝑹𝑗
𝜓𝑗[𝑖](𝒓) = 𝑃(𝒓 − 𝑹𝑗) ∙ 𝑂
[𝑖](𝒓). (3.17)
Analogously to the HIO algorithm, the Fourier constraint is enforced by replacing the
magnitude of the propagated exit wave |Ψ𝑗[𝑖]| by the squared root of the measured in-
tensities
Ψ𝑗[𝑖](𝒒) = ℱ {𝜓𝑗
[𝑖](𝒓)}, (3.18)
𝜓𝑗′[𝑖](𝒓) = ℱ−1 {√𝐼𝑗
meas(𝒒)Ψ𝑗[𝑖](𝒒)
|Ψ𝑗[𝑖](𝒒)|
}. (3.19)
Finally, the object function is updated at the current illuminated area according to
𝑂[𝑖+1](𝒓) = 𝑂[𝑖](𝒓) + 𝛽|𝑃(𝒓−𝑹𝑗)|
max(𝑃(𝒓−𝑹𝑗))
𝑃∗(𝒓−𝑹𝑗)
|𝑃(𝒓−𝑹𝑗)|2+𝛼(𝜓𝑗
′[𝑖](𝒓) − 𝜓𝑗[𝑖](𝒓)). (3.20)
The steps described by equations (3.17) to (3.20) are repeated for all scanning positions
until the whole scanned object area is updated and a new iteration of the algorithm
begins. In (3.20), 𝛽 is a feedback update constant similar to that used in Fienup phase
retrieval algorithms as in (3.8) to (3.10).
In (3.20), the first term |𝑃| max(𝑃)⁄ is a weighting factor that aims to compensate for the
effect of probe intensity variations in the illuminated area. The object function update
is consequently favoured at highly-illuminated areas as opposed to weakly-illuminated
regions where otherwise artefacts or errors would be observed. The second term
𝑃∗ (|𝑃|2 + 𝛼)⁄ removes the contribution of the probe function from the exit wave and
can be seen as a deconvolution‡‡ step by means of a Wiener filter [37]. Please note that a
simple division of the exit wave (or the difference term in (3.20)) by the probe function
would be undefined in regions where |𝑃(𝒓 − 𝑹𝑗)| = 0 , which is avoided in
𝑃∗ (|𝑃|2 + 𝛼)⁄ by including a small constant value 𝛼 in the denominator.
‡‡ The multiplicative relation between the object and probe function corresponds to a convolu-
tion between the Fourier transforms of the probe and object at the detector plane.

38
The illumination overlap constraint is implicitly described by (3.17), since the probe
functions 𝑃(𝒓 − 𝑹𝑗) and 𝑃(𝒓 − 𝑹𝑗+1), at adjacent scanning points partially overlap (as
shown in the example in Figure 3.9Figure ).
The extension of the PIE algorithm for simultaneous reconstruction of the object and
probe function was later proposed by Maiden and Rodenburg (2009) [38] by introduc-
ing expression (3.21) for the probe update function. This algorithm is known as ePIE
and stands for extended ptychographic iterative engine. In ePIE, the probe function up-
date proceeds in a similar fashion as the object update function in (3.20), according to
𝑃[𝑖+1](𝒓) = 𝑃[𝑖](𝒓) + 𝛽𝑃𝑂∗(𝒓+𝑹𝑗)
|𝑂(𝒓+𝑹𝑗)|2+𝛼(𝜓𝑗
′[𝑖](𝒓) − 𝜓𝑗[𝑖](𝒓)), (3.21)
where 𝛽𝑃 has the same role as 𝛽 in (3.20) and may be adjusted to modify the update
step-size. Here, I note that some differences between the expressions in this thesis and
those in the original papers, or following work, may exist. For example, in Maiden and
Rodenburg’s original paper [38] the small constant/regularization term 𝛼 and the
weighting term |𝑃| max(𝑃)⁄ in the object update function are omitted although they
may be required for numerical purposes.
The convergence of this ptychography reconstruction algorithm may be monitored in a
similar way as in CDI phase retrieval, by means of the sum squared error (SSE) be-
7
[rad]Reconstructed Object Phase
Probe Amplitude
Probe Overlap
Figure 3.9: Probe overlap in ptychography data acquisition. On the left: example of a reconstructed
object function (phase) from a catalyst powder in a capillary tube, acquired at the cSAXS beamline
(2004). The scanning positions are marked with a cross symbol, and the dashed circles represent the
probe extent/size at the first 3 scanning positions. The probe amplitude is represented on the top right
(with brightness proportional to the amplitude). The bottom right image superimposes the amplitude
of the probe at the first 3 scanning positions.

39
tween the experimentally measured intensities and those resulting from the squared
Fourier magnitude of the current reconstructed exit wave Ψ𝑗[𝑖] as
𝑆𝑆𝐸[𝑖] =∑ ∑ (𝐼𝑗
meas(𝒒)−|Ψ𝑗[𝑖](𝒒)|
2)2
𝒒𝑗
∑ ∑ (𝐼𝑗meas(𝒒))
2
𝒒𝑗
. (3.22)
Difference Map Ptychography (DM)
Prior to Maiden and Rodenburg’s extension of the PIE algorithm for probe retrieval,
Thibault proposed an iterative scheme for simultaneous object and probe reconstruc-
tion based on Elser’s difference map algorithm [39]. Elser’s difference map algorithm is
a search algorithm that aims to solve constraint-based problems by formulating them
as a set intersection operation in Euclidean space. Although it has been originally de-
signed to solve the missing phase-problem its applications span to other areas such as
protein folding, anagram unscrambling and Sudoku puzzle solving [39].
Generalized Difference Map Algorithm
The following is based on Elser’s description of the difference map algorithm [39]:
The DM algorithm aims to find a solution for 𝑥 in the intersection of two sets 𝐴 and
𝐵 in Euclidean space. The projection operators 𝑃𝐴 and 𝑃𝐵, given an arbitrary input
value for 𝑥, return a point in the constraint sets 𝐴 and 𝐵 respectively, that is closest
to 𝑥. Each 𝑖th iteration of the DM algorithm updates 𝑥 by applying the mapping
operator 𝐷(𝑥) that may be interpreted as an interpolation between the two projec-
tion operators through a parameter 𝛽𝐷𝑀:
𝑥[𝑖+1] = 𝐷(𝑥[𝑖]), (3.23)
𝐷(𝑥) = 𝑥 + 𝛽𝐷𝑀[𝑃𝐴(𝑓𝐵(𝑥)) − 𝑃𝐵(𝑓𝐴(𝑥))], (3.34)
with
𝑓𝐴(𝑥) = 𝑃𝐴(𝑥) −(𝑃𝐴(𝑥)−𝑥)
𝛽𝐷𝑀, (3.35)
𝑓𝐵(𝑥) = 𝑃𝐵(𝑥) +(𝑃𝐵(𝑥)−𝑥)
𝛽𝐷𝑀. (3.36)
Convergence to a fixed point (global minimum) has been only proven for problems
where 𝐴 and 𝐵 are convex sets [113], although this algorithm can be successfully
applied to more difficult problems, such as phase-retrieval, as it has been empirical-
ly shown.

40
Phase-retrieval problems, in particularly ptychography reconstructions, can be ex-
pressed as two intersecting constraints on the exit wave function 𝜓(𝒓) at each scanning
position. According to the forward model in (3.16), the Fourier modulus constraint
enforces compliance to the measured/recorded intensities
𝐼𝑗(𝒒) = |ℱ{𝜓𝑗(𝒓)}|2, (3.22)
while the overlap constraint states that the exit wave at each scanning positions can be
factorized as a probe and object function according to
𝜓𝑗(𝒓) = 𝑃(𝒓 − 𝑹𝑗) ∙ 𝑂(𝒓). (3.23)
In ptychography reconstructions, these constraints are enforced by the distance-
minimizing projections onto constraint sets expressed by the operators 𝑃𝑨 and 𝑃𝑩 that
act in the state vector �� = (𝜓1(𝒓), 𝜓2(𝒓), … , 𝜓𝑁𝑑𝑝(𝒓)) , with 𝑁𝑑𝑝 equal to the number of
acquired diffraction patterns. In each iteration of the DM algorithm, the projection as-
sociated to the Fourier modulus constraint, let us say 𝑃𝑨, consists simply in replacing
the modulus of the exit wave Fourier transform by √𝐼𝑗 while keeping the original
phases:
𝑃𝑨(��): 𝜓𝑗 → 𝜓𝑗𝐹 = ℱ−1 {√𝐼𝑗
ℱ{𝜓𝑗}
|ℱ{𝜓𝑗}|}. (3.24)
In turn, the projection 𝑃𝑩, associated to the illumination overlap, aims to find a solution
for the object and probe function, here represented by �� and ��, that minimizes the dis-
tance
‖�� − ��𝑂‖2= ∑ ∑ |𝜓𝑗(𝒓) − ��(𝒓 − 𝑹𝑗) ∙ ��(𝒓)|
2𝒓𝑗 , (3.25)
subjected to the constraint (3.23). This way:
𝑃𝑩(��): 𝜓𝑗 → 𝜓𝑗𝑂 = ��(𝒓 − 𝑹𝑗) ∙ ��(𝒓). (3.26)
In (3.24) and (3.25), the superscripts ‘𝐹’ and ′𝑂′ stand for the Fourier modulus and
Overlap constraint respectively, in order to distinguish the constrained state vector
from the input state vector ��. According to Thibault [40], minimization of equation
(3.25) does not have a closed-form solution and must be computed numerically, for
which various optimization methods may be successfully and efficiently applied. Thi-
bault suggested the use of a line minimization for (3.25), which reduces (3.25) to the
following system of equations:
��(𝒓) =∑ ��∗(𝒓+𝑹𝑗)𝜓𝑗(𝒓)𝑗
∑ |��(𝒓+𝑹𝑗)|2
𝑗
, (3.28)

41
��(𝒓) =∑ ��∗(𝒓+𝑹𝑗)𝜓𝑗(𝒓)𝑗
∑ |��(𝒓+𝑹𝑗)|2
𝑗
. (3.29)
While this system of equations cannot be decoupled analytically it has been empirically
found that updating the object and probe function with (3.28) and (3.29) in turn (for
different iterations) is an efficient procedure to find a minimum for (3.25).
The convergence behaviour of the difference map algorithm applied to ptychography
reconstructions may be monitored by the sum squared error (3.22) as in the PIE or ePIE
algorithm, but Thibault has additionally suggested the difference map error metric 𝜖
expressed as
𝜖[𝑖] = ‖��[𝑖] − ��[𝑖−1]‖. (3.30)
Having defined the projection operators 𝑃𝑨 and 𝑃𝑩, the reconstruction algorithm fol-
lows the difference map procedure, taking random complex values for the initial
guesses for the object and probe function. In practice it has been observed that the re-
construction convergence is improved by better initial estimates of the object and probe
function. If an initial probe function is not available, it can be either modelled or esti-
mated from the autocorrelation function of the exit wave. The parameter 𝛽𝐷𝑀 in (3.34)
to (3.36) may take any value in the interval [−1,1], and so far, optimal values (for good
reconstructions) have been found empirically for different datasets. Without any prior
information the values 𝛽𝐷𝑀 = ±1 are preferred because this reduces the number of
projection evaluations per iteration. In fact, replacing 𝛽𝐷𝑀 = 1 in (3.34) to (3.36) reduces
the mapping 𝐷(𝑥) to 𝐷(𝑥) = 𝑥 + 𝑃𝑨(2𝑃𝑩(𝑥) − 𝑥) − 𝑃𝑩(𝑥) which is equivalent to
Fienup’s HIO algorithm [39].
Note on other Ptychography reconstruction algorithms
Reconstruction algorithms for phase-retrieval, specifically for ptychography recon-
structions, are currently in continuous development by different research groups. The
description of the PIE, ePIE, and DM algorithms in this thesis was mainly motivated by
historical reasons and by the fact that they have been implemented in the open-source
software package Ptypy [41] currently widely used at synchrotron beamlines. Howev-
er, I found other ptychography reconstruction methods available in the literature
worth mentioning given some particularities associated to each of the different algo-
rithms.
Already in 2008, prior to the extension of the PIE algorithm for probe retrieval, Guizar
and Fienup [42] proposed a non-linear optimization method for simultaneous recon-
struction of the probe and object function with additional refinement of the probe
scanning positions. This method was seen to return superior reconstruction accuracy in
the presence of noise or when the system parameters are inaccurately known.

42
A general alternating minimization algorithm for nonconvex optimization problems
with application to ptychography reconstructions was introduced by Hesse et al. [43]
in 2014 under the name PHeBIE that stands for Proximal Heterogeneous Block Implic-
it-Explicit method. The major highlight of this work is the clear description of the
method’s mathematical framework, proof of convergence to critical points and com-
parison with other existing reconstruction methods.
Recently in 2018, Odstrčil et al. [44] suggested a new iterative least-squares method for
ptychography reconstructions of the object and probe functions. The reconstruction
algorithm is framed as two constrained optimization problems, one in real space and
other in reciprocal space, where the measured intensity data is assumed to be corrupt-
ed by both Poisson and additive white noise (Gaussian). To account for this mixed
noise model, Odstrčil suggested the use of a negative log-likelihood metric as the op-
timization problem cost-function. This approach is similar to the one used for the 3D
ptychography reconstruction algorithm developed during my work, with the main
difference that the forward model is expressed in terms of the diffraction data ampli-
tudes instead of intensities as in my work [45]. Another relevant characteristic of Od-
strčil’s recent reconstruction method is its ability to estimate variations in the probe
function during data acquisition which translates into lower artefacts in the final re-
constructed object function.
Ptychography in inverse space
The ptychography principles (and algorithms) may also be applied in the reciprocal
space in what is known as Fourier ptychography. This technique is often used with
visible light (such as lasers) and with the aid of imaging optics such as lenses. In Fouri-
er ptychography however, the measured intensities in the detector plane correspond to
a real space image, and the “field-of-view” of the reciprocal space is enlarged by means
of a ptychography reconstruction algorithm. The resulting reconstructed real space
image spans the same spatial FOV as in the detector but has increased spatial resolu-
tion when compared with a single measurement [46]–[48].

43
X-ray fluorescence mapping – XRF
X-ray fluorescence (XRF) is a non-destructive spectroscopy technique used to deter-
mine the chemical composition of a sample and their relative elemental concentrations.
The principles of XRF are based on the photoelectric effect and X-ray fluorescence
emission by the sample under investigation upon excitation by an incident high-
energetic X-ray beam§§ as briefly described in Chapter 2.5.
In a conventional XRF experiment, a sample is illuminated and excited by a high-
energy focused X-ray beam. As a consequence, the sample emits X-rays in a broad
spectrum that is recorded by an X-ray fluorescence detector. Each XRF measurement
returns an X-ray spectrum with characteristic peaks and background that carry infor-
mation about the chemical composition (and other external factors) of the sample area
under illumination. X-ray fluorescence maps are finally generated by combining sever-
al XRF spectra measured at different scanning positions. After data acquisition, the
recorded XRF spectra must be analysed and decomposed into the different contribu-
tions from the individual elemental peaks, background and other possible features.
This is often done by fitting a model of the generated intensities by a group of elements
(selected by the user) to the measured spectra via for example a least-squares minimi-
zation approach.
The relationship between elemental concentration and intensity of the emitted X-rays
depends on several factors besides the sample’s composition, including for example
the experimental setup itself. In the mid-1950s, J. Sherman proposed a theoretical mod-
el that describes the relationship between the emitted intensities and elemental concen-
tration that later became the basis for the “fundamental parameters” approach for XRF
calibration [49]. In this thesis I include Sherman’s main remarks under the simplifying
assumptions: a two-dimensional sample of thickness ℎ is illuminated by a parallel and
monochromatic X-ray beam with incoming intensity 𝐼0 with an incident angle of 90°,
i.e. the incident beam is perpendicular to the sample’s surface (see Figure 3.10). Also
for simplification, I will only consider primary fluorescence events and I will mainly
focus on the 𝐾𝛼 X-ray emission of an element with index ‘𝑗’ and mass concentration 𝑤𝑗.
Secondary and tertiary fluorescence occurs when the primary (or secondary) X-ray
fluorescence emission induces characteristic fluorescence events in other elements (or
lower energy shells) of the sample. These effects are often accounted for, in XRF data
analysis, with more advanced models or by means of modelling methods such as Mon-
te Carlo simulation [50].
§§ An electron beam may also be used as incident probe, for which the technique received dif-
ferent names, such as, electron-probe X-ray fluorescence (EP-XRF), energy dispersive X-ray
spectroscopy (EDX), wavelength dispersive X-ray spectroscopy (WDX), among others.

44
The quantitative analysis for mass concentration estimations from fluorescence intensi-
ty measurements is here described in different steps:
First, I introduce the relationship between the incoming beam attenuation and
the X-ray photon absorption by an element with index ‘𝑗’;
Then, the probability for a 𝐾𝛼 photon emission is estimated based on the ab-
sorption jump ratio, transition probability and fluorescence yield;
Finally, the attenuation of the emitted 𝐾𝛼 photons from the sample to the fluo-
rescence detector is taken into account.
The attenuation or absorption of the incoming beam by the sample is described by the
Beer-Lambert law as in expression (2.15), i.e. a sample material with an average linear
absorption coefficient 𝜇𝑠 , attenuates the incoming beam over the X-ray penetration
depth according to
𝐼(𝑧) = 𝐼0e−𝜇𝑠𝑧. (3.31)
The absolute fraction of radiation intensity that is absorbed by an element of thickness
d𝑧 is determined by combining equation (3.31) with its derivative with respect to the
penetration depth 𝑧:
d𝐼
𝐼= 𝜇𝑠d𝑧. (3.32)
However, the radiation may be absorbed by the different elements that constitute the
sample, and only a fraction of it is received by the element with index ‘𝑗’. This fraction
is given by the product of the elemental mass concentration 𝑤𝑗 and the ratio between
the mass absorption coefficient of the element and the sample respectively. Please note,
Sample Translations
XRF Detector
(a) (b)
XRF Detector
Incident beam
Figure 3.10: (a) (Example) of experimental setup for an XRF scanning experiment. A focused X-ray beam
illuminates an area of the sample that consequently emits fluorescent X-rays in all directions. The frac-
tion of the emitted X-rays seen by the detector is defined by the solid angle 𝛀. (b) Relative orientation
between incident beam, sample and XRF detector.

45
that the mass attenuation coefficient is defined as 𝜇/𝜌, and thus equation (3.32) takes
the form
d𝐼𝑗
𝐼= (𝑤𝑗
𝜇𝑗𝜌𝑠
𝜇𝑠𝜌𝑗) 𝜇𝑠d𝑧, (3.33)
that now represents the fraction of the incident radiation intensity that is absorbed by a
specific element ‘𝑗’ in an infinitesimal thickness d𝑧. In equation (3.33), 𝜌𝑠 and 𝜌𝑗 repre-
sent the mass density of the sample and the element ‘𝑗’ respectively.
The radiation absorbed by a specific element can still result in several electron transi-
tions between the different energy shells of the atom (besides the 𝐾𝛼 emission). To ac-
count for this, one often relies on the excitation factor 𝑄𝐾𝛼 that in turn is defined as the
product of the probabilities of three main events:
The probability of an electron to be ejected from a K-shell rather than another
(shell);
The probability for a 𝐾𝛼 emission (L-K transition) rather than 𝐾𝛽 (M-K transi-
tion) or other possible K lines;
The probability for the ejection of an Auger electron rather than 𝐾𝛼 emission.
The probability of an electron to be ejected from a K-shell rather than an L- or M-shell
is expressed by the absorption jump factor (or ratio) 𝐽𝐾:
𝐽𝐾 =𝑟𝐾−1
𝑟𝐾, (3.34)
(a) (b)
Figure 3.11: (a) Linear absorption coefficient (and imaginary decrement of refractive index) for a
Cu2ZnSnS4 sample around the Zn characteristic K-edge. (c) Fluorescence yields for the 𝑲𝜶 and 𝑳𝜶 lines
emission as function of the material atomic number, based on semi-empirical analytical expressions
from Hubbell [114].

46
where 𝑟𝐾 is the K-shell absorption jump defined as the ratio between the linear absorp-
tion coefficients at the K absorption edge as illustrated in Figure 3.11a:
𝑟𝐾 =𝜇max
𝜇min. (3.35)
Second, the probability for a 𝐾𝛼 emission rather than other possible K-lines is given by
a transition probability 𝑔𝐾𝛼 :
𝑔𝐾𝛼 =𝐼(𝐾𝛼)
𝐼(𝐾𝛼)+𝐼(𝐾𝛽). (3.36)
Finally, the probability for a 𝐾𝛼 radiation emission rather than the ejection of an Auger
electron is dictated by the fluorescence yield 𝜔𝐾. The fluorescence yield for the 𝐾𝛼 and
𝐿𝛼 lines of some materials is represented in Figure 3.11b.
The absorption jump ratio, transition probability and fluorescence yield may be de-
termined experimentally or based on theoretical models. The resulting excitation factor
is then:
𝑄𝐾𝛼 = 𝐽𝐾𝑔𝐾𝛼𝜔𝐾 =𝑟𝐾−1
𝑟𝐾
𝐼(𝐾𝛼)
𝐼(𝐾𝛼)+𝐼(𝐾𝛽)𝜔𝐾. (3.37)
The fluorescent radiation generated by the infinitesimal volume is still attenuated by
the sample through its path back to the detector. If one neglects any other form of at-
tenuation (as for example attenuation by the air between the sample and detector) the
fraction of radiation that reaches the detector is given by
exp [−𝜇𝑠,𝐾𝑗𝑧
cos (𝜙𝑑) ]. (3.38)
The sample’s linear absorption coefficient is represented in (3.38) by 𝜇𝑠,𝐾𝑗 to distin-
guish it from 𝜇𝑠 in (3.31), as the first is calculated for an excitation energy equal to the
emitted fluorescent radiation energy, whereas the second is calculated for the excita-
tion energy of the incoming beam.
Besides the aforementioned remarks, the fluorescent radiation is emitted uniformly in
all directions over a solid angle of 4𝜋 sr (as represented by the green sphere in Figure
3.10) although only a fraction of it (Ω/4𝜋) is seen by the XRF detector. Taking all this
into account, the primary 𝐾𝛼 fluorescent radiation from an element ‘𝑗’ of thickness d𝑧 is
given by
d𝐼𝑗 =Ω
4𝜋𝐼0e
−𝜇𝑠𝑧 (𝑤𝑗𝜇𝑗𝜌𝑠
𝜇𝑠𝜌𝑗) 𝜇𝑠𝑄𝐾𝛼 exp [−𝜇𝑠,𝐾𝑗
𝑧
cos(𝜙𝑑) ] d𝑧. (3.39)
Integrating (3.39) with respect to 𝑧 through the whole sample thickness (𝑧 = [0, ℎ]) re-
sults in

47
𝐼𝑗 =Ω(𝐼0𝜔𝑗𝜇𝑗𝜌𝑠𝑄𝐾𝛼)
4𝜋𝜌𝑗(𝜇𝑠+𝜇𝑠,𝐾𝑗 cos(𝜙𝑑)⁄ )
(1 − exp [−ℎ (𝜇𝑠 + 𝜇𝑠,𝐾𝑗 cos(𝜙𝑑)⁄ )]). (3.40)
Equation (3.40) can now be used as a forward model to estimate the emitted intensity
(or photon counts) by a specific element, according to the previously mentioned as-
sumptions. This forward model is then used by some type of optimization algorithm in
order to match the experimentally measured intensities (for all detectable elements), so
that the mass concentrations 𝜔𝑗 can be determined. If the measured sample consists of
a stack of layers of different materials, the forward model in (3.40) must be extended to
include additional self-absorption events that may occur at the different layers (with
different linear absorption coefficients and thicknesses).
X-ray fluorescence spectroscopy has been widely used in combination with scanning
electron microscopy. Electron beams are often easier to control and manipulate (using
magnetic and electric fields), and thus may yield smaller probe sizes and higher spatial
resolutions, with suitable high fluxes. On the other hand, X-rays have higher penetra-
tion depths when compared to electrons (see Figure 3.12) and thus are not limited to
surface measurements. Besides, X-ray induced XRF spectra have higher elemental sen-
sitivity, usually a lower Bremsstrahlung or continuous background and do not require
the sample to be conductive and electrically grounded during measurement.
x [µm]
y [µm] Electrons X-raysy [µm]
x [µm]x [µm]
y [µm] Electrons X-raysy [µm]
x [µm]
Figure 3.12: Comparison between the interaction volumes of an electron and X-ray beam incident on a
kesterite (Cu2ZnSnS4) substrate. An incoming beam of 10.4 keV (electrons or photons) reaches the sub-
strate surface (𝒚 = 𝟎) with a diameter of 𝟏𝟎𝟎 nm, scatters and is absorbed or transmitted by the sample.
Backscattered particles (electrons or photons) are represented by yellow lines whereas all remaining
trajectories are represented in blue. The end point of a trajectory corresponds to the full absorption of
an electron or photon. For identical energies, the interaction volume for an electron beam gets confined
to penetration depths lower than 𝟏 𝛍𝐦, whereas for X-rays the beam is almost fully transmitted through
the whole sample. A total of 1000 trajectories were simulated using the Monte Carlo model of the open-
source software pyPENELOPE [115].

48
X-ray beam induced current mapping – XBIC
Beam-induced current techniques have been successfully applied to the investigation
of local electrical properties of semiconductor materials. Their fundamental principle
relies on the measurement of the electric current generated by a specimen upon excita-
tion by an optical (OBIC or LBIC), electron (EBIC), or X-ray beam (XBIC).
In a wider context, X-ray beam induced current techniques may include all different
forms of X-ray detection in which the measured current is, at a first approximation,
proportional to the number of absorbed X-ray photons. For example, an X-ray (absorp-
tion) detector consisting of a scintillator and a CCD (charged-coupled device) can be
said to exploit the XBIC principle during data acquisition. Nevertheless, the term XBIC
is generally used for experiments, in which the specimen acts as detector itself, i.e., the
measured current arises from electron-hole pairs generated in the sample upon X-ray
excitation. As any beam-induced current technique, XBIC is a powerful tool for the
study and characterization of solar cells. The technique’s full potential is realized when
XBIC is combined and correlated with XRF measurements, from which a relationship
between the charge collection efficiency (CE)and the specimen’s elemental composi-
tion can be determined. The charge collection efficiency quantifies the probability of
converting photons into electric current and plays a fundamental role in solar cells en-
gineering, where losses due to recombination (1 − CE)should be minimized.
In 2000 H. Hielsmair, et al. [51] proposed, with proof of principle, the use of XBIC for
the investigation of crystalline silicon solar cells. Their main motivations were the
higher penetration depth of X-rays when compared to electrons (EBIC) and the possi-
bility to simultaneously acquire XRF data with sufficiently high sensitivity to detect
trace elements and microdefects in fully functional devices. In the last few years, XBIC
measurements have been extended from silicon to thin-film solar cells such as CIGS
[52], CdTe [53], organic photovoltaics (OPV) [54], perovskite [55] and kesterite (see
Chapter 5).

49
The experimental setup and strategy for XBIC data acquisition follows the same prin-
ciples of a scanning method such as XRF, in the sense that a highly focused X-ray beam
excites a localized area of the specimen, from where the signal is measured. The sample
is then moved to a new scanning position and the measurements are repeated until a
full two-dimensional map representative of a region of interest is acquired.
While in XRF one exploits the emitted fluorescent radiation resulting from the ejection
of an electron from an atom (photoelectron), in XBIC the recorded signal is given by
measurements of the current generated by the ejected electrons. XBIC distinguishes
from other photoelectron measurement techniques, such as X-ray photoemission elec-
tron microscopy (XPEEM) or photoelectron spectroscopy (XPS), in the way the electric
current is measured. In XPEEM, or other analogous methods, the electrons emitted
from a surface are directly measured (see Figure 3.13 left) whereas in XBIC the elec-
trons are measured indirectly by exploiting the semiconductor properties of a p-n junc-
tion***. The circuit schematics in Figure 3.13 left, shows an example of an experimental
setup for the measurement of the total electron yield (TEY). After photoexcitation, and
electron emission, the sample surface becomes positively charged and new electrons
flow from a grounded connection to restore charge neutrality in the sample. In this
*** A p-n junction is one of the simplest ways to create a semiconductor device, by joining a p-
type (positive) material with excess of holes with an n-type material with excess of electrons. A
p-n junction diode only allows current to flow in one direction, i.e. electrons flow easily through
the junction from the n- to the p-type material, and the opposite for the holes.
n
p
-
A
n
p
-
-+
A
TEY XBIC
Figure 3.13: Experimental setups for TEY (left) and XBIC (right) measurements. In TEY, photoelectrons
ejected from the layer where X-rays are incident, locally recombine or are replaced by new electrons
from a grounded connection. The replacement current is measured between the exit-layer and the
ground thus representing the sample’s total electron yield. In XBIC, the replacement current is instead
measured between the two terminals of the p-n junction, and thus only charge carriers dissociated at
the p-n junction contribute to the measured current.

50
case, the replacement current is a measure of the ejected electron current, which after
normalization with respect to the incident photon flux returns the TEY.
For XBIC measurements on solar cell devices (or other type of semiconductor material),
the setup on Figure 3.13 right must be used instead [56]. The incoming X-ray beam may
hit either the p- or n-type material, as long as the incident layer is electrically ground-
ed, and the current is measured between the p- and n-type materials. This way, elec-
trons ejected from the top layer (where the X-rays are incident) are quickly replenished
by the electrically grounded connection but do not contribute to the measured current.
In fact, any electron or hole generated in the p- and n-type layers are prone to recom-
bine since the p-n junction limits one of the charge carriers’ mobility through the junc-
tion. However, electron-hole pairs generated by the X-ray photons in the absorber lay-
er, as analogously happens with visible light in standard solar cells operation, diffuse
to the p- and n-type semiconductors, generating a potential bias. The electric current
measured by closing the circuit between the two semiconductors is then only depend-
ent on the generated charge carriers in the absorber layer and is representative of the
device’s charge collection efficiency (CE) [57]. In turn, the charge collection efficiency is
defined as the ratio between the number of collected ( 𝑁𝑒−/ℎ+coll ) and the number of gen-
erated ( 𝑁𝑒−/ℎ+gen
) electron-hole pairs (𝑒−/ℎ+) as
CE = 𝑁𝑒−/ℎ+coll
𝑁𝑒−/ℎ+gen . (3.41)
In the photovoltaic community, the charge collection efficiency is often interpreted
from external (EQE) and/or internal quantum efficiency (IQE) measurements that are
available with standard laboratory equipment with absolute errors on the order of 1%.
The EQE and IQE describe the ratio between the number of collected electron-hole
pairs and the number of incident (𝑁𝑝in) or absorbed (𝑁𝑝
abs) photons respectively:
EQE = 𝑁𝑒−/ℎ+coll
𝑁𝑝in , (3.42)
IQE = 𝑁𝑒−/ℎ+coll
𝑁𝑝abs . (3.43)
Solar cells usually operate in the visible part of the electromagnetic spectrum, where
the generation of more than one electron-hole pair per incident photon can be consid-
ered negligible. Under this condition (visible light), the number of generated charge
carriers may be approximated to the number of absorbed photons so that 𝑁𝑒−/ℎ+gen
≈
𝑁𝑝abs. Also, under the assumption of null transmittance, i.e. the incident light is either

51
absorbed or reflected, the number of absorbed photons can be approximated by
𝑁𝑝abs ≈ 𝑁𝑝
in(1 − 𝑅), where 𝑅 represents the device’s reflectance, or if preferred, the frac-
tion of light that is not absorbed. This way, under the assumption of photoexcitation
with visible light:
CE = 𝑁𝑒−/ℎ+coll
𝑁𝑒−/ℎ+gen ≈ IQE =
𝑁𝑒−/ℎ+coll
𝑁𝑝in(1−𝑅)
=EQE
(1−𝑅). (3.44)
However, in the X-ray part of the electromagnetic spectrum, the approximations in
(3.44) do not hold, mainly because a high-fraction of the X-rays is fully transmitted
through the sample and the emitted fluorescent radiation may promote a cascade of
photoexcitation events. The number of generated charge carriers is then estimated from
the incident photon flux by means of a correction factor 𝐶 that accounts for the absorb-
er layer absorptance and the number of generated electron-hole pairs per absorbed
photon. This way, the charge collection efficiency under excitation by X-rays, here de-
noted by CEX is then expressed as
CEX = 𝑁𝑒−/ℎ+coll
𝑁𝑒−/ℎ+gen ≈
𝑁𝑒−/ℎ+coll
𝐶∙𝑁𝑝in . (3.45)
For proper quantification of XBIC signals, the correction factor 𝐶 must be estimated
taking into account X-ray absorption and secondary particle interactions. For this rea-
son calculations based on the Beer-Lambert’s attenuation law alone do not suffice and
more complex models, based for example on Monte Carlo simulations, must be used
instead. Although Stuckelberger et al. [56] suggested a method for estimating the cor-
rection factor 𝐶, based on the properties of the sample and incoming X-ray beam, as
pointed out by the same authors, absolute/quantitative CEX measurements with rela-
tive low errors are still out of reach with current experimental methods and equipment.
Errors in XBIC measurements are mostly attributed to the lack of calibrated X-ray de-
tectors installed at synchrotron beamlines and uncertainties in the sample layer thick-
nesses. Nonetheless, relative/qualitative maps of CEX, normalized to 100%, still provide
useful information and highlight local differences in charge collection efficiency within
the same specimen with high spatial resolution.

52
3.3 Challenges in high-resolution imaging
In this chapter I introduced the main X-ray imaging and mapping techniques that I
have worked with during my PhD studies. The described methods exhibit unique im-
aging characteristics that are of special relevance for the structural, chemical and elec-
trical characterization of solar cell devices, currently a hot research topic at DTU, and
more specifically at DTU Energy.
However, the applicability of these techniques, for example for characterization of the
active layer of organic photovoltaics, has been mainly restricted by the obtained spatial
resolutions currently provided by most synchrotron beamlines. Whereas the spatial
resolution of coherent diffractive imaging techniques such as full-field CDI and
ptychography is mostly diffraction-limited, other factors such as the degree of coher-
ence of the illumination wave front, and the possibility for induced radiation damage
also have meaningful contributions. On the other hand, in mapping techniques such as
XRF and XBIC the obtained spatial resolution is a function of the distance between two
adjacent scanning points and the size of the illumination function, or if preferred, the
interaction volume between the incoming X-rays and the sample.
The extension of ptychography imaging to 3D, by means of tomographic principles
(see Chapter 4), requires additional computational operations such as phase-
unwrapping, background normalization, tomographic alignment and reconstruction. If
these are not carried out satisfactorily, they may also be a source of additional artefacts
or result in degradation of the final tomogram resolution.
In the last three years, most of the work developed during my PhD was devoted to the
improvement of the ultimate high-resolution of different X-ray imaging techniques by
numerical methods. This problem was addressed in three independent but related
tasks:
1. We introduced an automated tomographic alignment algorithm [9] with appli-
cation to phase-contrast (CDI or ptychography) tomography, which includes a
self-consistent iterative refinement of the translational and angular alignment
parameters. The method we proposed was successfully applied to simulated
and real datasets and suggested that the final three-dimensional spatial resolu-
tion of a reconstructed tomogram can be improved by a three-dimensional
alignment of the reconstructed projections. During our investigations we have
seen our alignment method to fail on datasets with heavily wrapped projections
and in the presence of phase residues (see Phase-Wrapping), that should and can
be avoided or reduced by proper design of the sample and experimental setup.
So far, for good datasets, the main limitation of our method’s implementation

53
and performance is its requirement for large memory (RAM) and graphic pro-
cessor units (GPU). Fortunately we are currently observing a fast expansion and
quick development of these computational resources that will certainly fulfil
our needs in the near future. A MATLAB implementation of our tomographic
alignment and reconstruction method was made publically available and can be
accessed through reference [58].
2. As part of a collaboration project with MAX-IV laboratory, under the IN-
TERRREG project, we developed a numerical method for resolution enhance-
ment of “STXM-type” images by means of a deconvolution with the illumina-
tion intensity function. The proposed method is further described in Resolution
Enhancement of STXM-type techniques by probe deconvolution.
3. We introduced a new numerical method that extends ptychography reconstruc-
tions to three dimensions. Our reconstruction algorithm described in reference
[45] iterates directly between a three-dimensional function representing the re-
fractive indices of a sample and the intensities of coherent diffraction patterns
measured at different scanning and angular positions. By exploiting data re-
dundancy between different tomographic angles in a single reconstruction vol-
ume, three-dimensional phase-retrieval/reconstruction algorithms have proved
to relax the requirements for illumination overlap during data acquisition. Be-
sides the possibility for faster acquisition times, the scanning geometry can also
be optimized for a uniform dose distribution on the sample, which in turn is
not only beneficial from a numerical point of view during data reconstruction
but also decreases the possibility of radiation damage on the sample. So far, the
application of our reconstruction algorithm relies on the precise knowledge of
the relative positions between the beam and the sample at different rotation an-
gles, which is often only fully available after tomographic alignment of the re-
constructed projections. Today, interferometric systems for active control of the
sample movement can achieve sub-10 nm precision but are unable to track large
sample movements necessary when rotating the sample with accuracies better
than ~100 nm. The route for higher-resolution phase-contrast tomography (or
coherent diffraction imaging) is thus dependent on the continuous develop-
ment of interferometric alignment systems combined with ever-increasing
computational resources, new reconstruction algorithms, and new generation
synchrotrons. A MATLAB implementation of this reconstruction tool is availa-
ble online and can be accessed through the DOI: 10.6084/m9.figshare.6608726.
Different approaches to improve the spatial resolution of CDI reconstructions have
already been proposed in the literature by various research groups. For example, in
2011 Maiden et al. [59] suggested the possibility to extrapolate the recorded diffraction

54
patterns intensities beyond the detector’s aperture during ptychography reconstruction
using a modified version of the ePIE algorithm. This superresolution technique has
shown promising results and reported the ability for large increases in resolution over
3 − 5 times, without the acquisition of additional data or introduction of noise.
CDI techniques often assume full spatial (transverse) and temporal (longitudinal) co-
herence of the incident X-rays and thus small deviations from the ideal setup can pre-
vent the reconstruction algorithm to fully converge. Based on Wolf’ coherent-mode
decomposition model [60], [61], different authors proposed modifications to the con-
ventional full-field CDI reconstruction algorithms to account for partial transverse [62]
and longitudinal [63] coherence of the illumination source. Later, Thibault and Menzel
[64] applied the same principle of multi-mode probe decomposition to ptychography
reconstruction algorithms which consequently relaxes the coherence requirements of
the experiment, allowing for higher fluxes and shorter exposure times, and improves
the final reconstruction quality by minimizing reconstruction artefacts.
Coherent diffraction patterns, especially those from a parallel X-ray beam and recorded
in the far-field, are often significantly brighter at their centre and may have very low
(or null) counts at large scattering angles that are associated with the smaller scatter-
ers/features in the sample. In order to increase the reconstructed spatial resolution one
must access and measure with sufficient statistics the high frequency information en-
coded in high scattering angles, in the outer parts of the detector. Higher counting sta-
tistics can be obtained by increasing the exposure time, but because of the large dy-
namic range of intensities in the detector this may cause saturation of lower diffraction
orders. Alternatively, as demonstrated by Li et al. [65], an optical static diffuser mount-
ed close to the specimen can be used to spread the recorded intensities uniformly over
all detector pixels and extend the angular range of the recorded intensities. Besides,
any form of illumination function becomes highly structured after passing through a
diffuser, a characteristic that is known to be favourable during ptychography recon-
struction and for decoupling the different illumination modes.
As experimental setups for data acquisition are becoming more stable, light sources
more brilliant and coherent, and reconstruction algorithms more robust, CDI methods
will most likely reach the spatial resolution limit, imposed by the coherent properties
of the illumination source or by the radiation damage on the sample [66].

55
Coherence requirements
Despite the fact that numerical algorithms for CDI and ptychography reconstructions
that account for partial illumination coherence exist, I found relevant to highlight the
theoretical limitations on the spatial resolutions of coherent diffractive imaging meth-
ods. In real experimental setups, the incoming X-ray beam deviates from the ideal de-
scription of a plane wave in two main aspects: the beam is not fully monochromatic
and its propagation direction is not perfectly well defined. Associated twith these fea-
tures are the concepts of longitudinal 𝐿𝐿 and transverse 𝐿𝑇 coherent lengths respective-
ly defined as
𝐿𝐿 =𝜆2
Δ𝜆, (3.46)
𝐿𝑇 =𝜆𝐿
𝑊, (3.47)
where Δ𝜆 represents the wavelength bandwidth measured at FWHM, 𝐿 the distance
from the sample to the detector and 𝑊 the width of the object (in CDI) or illumination
function at the object plane (in ptychography). The coherence and sampling require-
ments for optimum results in diffractive imaging are succinctly described in the review
work by Spence et al. [67]. The Nyquist-Shannon sampling criterion for diffraction pat-
terns intensities was already mentioned in the section of Coherent Diffraction Imag-
(a) (b)
Figure 3.14: Graphical representation of the longitudinal (a) and transverse (b) coherence lengths. (a)
two plane waves are initially in phase and propagate in the same direction but with different wave-
lengths. Consequently, their phase evolves differently and after a propagation distance equal to the
longitudinal coherence length 𝑳𝑳 the two waves are out of phase by a factor of 𝝅. (b) two plane waves,
here represented by their wave fronts/crests, with the same wavelength and initial phase propagate in
different directions, defined by the divergence angle 𝚫𝜽 ≈𝑾 𝟐𝑳 = 𝝀 𝟐𝑳𝑻⁄⁄ . Because the waves propa-
gate with different directions, their relative phase is different in each point on the wavefront. The
(transverse) distance or coherence length is then the distance along a wavefront between points that are
in-phase and out-of-phase.

56
ing, and as explained imposes a maximum size on the specimen for full-field CDI. This
same requirement translates into a maximum size of the probe function at the object
plane for ptychography defined as
𝑊 ≤𝜆𝐿
2𝑑ps. (3.48)
In order to avoid overlap between different diffraction orders in the same pixel of the
detector, under the paraxial approximation, the longitudinal and transverse coherence
lengths must obey:
𝐿𝐿 ≥ 𝑊(2𝜃)max, (3.49)
𝐿𝑇 ≥ 2𝑊. (3.50)
The spatial resolution in CDI is dependent on the sample properties and thus a simple
relation between resolution and coherence lengths is not well defined. However we
can establish these relationships in terms of the object and reconstructed pixel/voxel
sizes. Recalling expression (3.12) and the oversampling criterion, the maximum scatter-
ing angle (2𝜃)max relates to the finest spatial frequency of the object by (2𝜃)max =𝜆
2𝑟𝑝𝑠.
Taking this, and combining (3.46) and (3.47) with (3.49) and (3.51) returns
Δ𝜆
𝜆≤2𝑟𝑝𝑠
𝑊, (3.51)
𝑊 ≤ √𝜆𝐿
2, (3.52)
which impose a maximum relative wavelength bandwidth and size for the object or
illumination function (at the object plane).
Phase-wrapping and Phase residues
Although not directly related to limitations in resolution, the presence of phase-
wrapping in the reconstructed phase of the complex object can introduce challenges
and artefacts during tomographic reconstruction. Because phase-retrieval algorithms
are insensitive to constant phase offsets and the periodic nature of phase signals, the
phase of the reconstructed object is only known modulo 2𝜋, commonly represented in
a [−𝜋, 𝜋] range. Phase unwrapping is possible using numerical methods, such as the
two-dimensional Goldstein unwrapping algorithm [68] or Volkov’s method [69], but
may be unfeasible in the presence of noise, reconstruction artefacts or aliasing due to
undersampling of the phase, i.e. the phase difference between two adjacent pixels is
larger than 𝜋. In the presence of these or other sources of errors, a closed-path integral
around a pixel of the phase image may be different than zero as expected. To these

57
points we give the name of phase residues or more specifically, “positive residue charge”
if the integral returns +2𝜋, or “negative residue charge” if the integral is equal to −2𝜋.
In the datasets I worked with during my PhD studies, the most predominant source of
phase residues was associated with sharp phase transitions that occur at edges between
two materials (or background) with different contrast. As an example, Figure
3.15Figure shows the ptychography reconstruction (phase) of an organic solar cell
with phase wrapped areas and phase residues. The high contrast between the materials
that compose the active layer (PC70BM:P3HS) and the electrodes (Cu and ZnO) is re-
sponsible for large phase transitions at their interface that may not be representable in
a single pixel and thus result in a phase residue. Consequently phase-unwrapping be-
comes challenging or introduces artefacts when conventional algorithms are used, that
propagate further to three dimensions after tomographic reconstruction. To avoid or
mitigate these adverse effects, without changing the composition of the sample system,
one could in principle apply any of the following suggestions:
Phase wrapping can be simply avoided by setting the specimen’s thickness so
that all phase-shifts through the object are smaller than 2𝜋†††, or alternatively
∫𝛿(𝑥, 𝑦, 𝑧, 𝑘)d𝑧 < 𝜆. Here I write 𝛿 as function of the spatial coordinates and
wave vector to highlight its dependency on the incoming illumination energy.
††† Here it could be argued that if air (background) is taken as a reference value for the phase
(equal to zero), the maximum admissible phase-shift on the sample is 𝜋 and values larger than
this will result in wrapped areas.
5 µm
(a) (b) (c) (d)
1 µm 1 µm 1 µm
Figure 3.15: Effect of phase residues in phase unwrapping. (a) Phase-contrast projection of an organic
solar cell with a PC70BM:P3HS bulk heterojunction, acquired at the cSAXS beamline with 6.2 keV
incoming beam and reconstructed pixel size of 11.5 nm. (b) Location of the phase residues (red circles)
in a zoomed area of the specimen with phase wrapping. (c) Volkov’s unwrapping method is not path-
dependent but the presence of phase residues results in artefacts that extend beyond the problematic
area. (d) Goldstein’s branch-cut unwrapping method is able to handle phase residues as long as positive
and negative residue charges can be paired. Otherwise, Goldstein’s method is not robust and becomes
path-dependent as the example shows: In this example the unwrapping procedure started at the top left
corner of the image and thus all points below and at the right of a phase residue are affected by a
strong offset which results in the darker rectangular region in (d).

58
Sharp phase transitions may be reduced and spanned to several pixels by in-
creasing the spatial resolution of the reconstructed projections. This can be
achieved, for example, by reducing the reconstructed pixel size by appropriate
selection of the parameters in equation (3.14). Increasing data redundancy may
also provide additional constraints during reconstruction and decrease the
number of observed artefacts and phase residues.
Although phase residues are mostly located at interfaces, their effect may extend
to a few voxels in each layer of the reconstructed tomogram. If phase residues
cannot be avoided with the available spatial resolution, one may alternatively
increase the height of the layers of interest and aim to guarantee a significantly
wide field-of-view that is not affected by such artefacts.
Radiation damage and X-ray dose
New fourth-generation synchrotrons and free-electron lasers (FEL) are continuously
under development and will progressively deliver X-ray beams with a superior degree
of coherence and significant fluxes. When the coherence properties of the beam are no
longer a limitation to the reconstructed image resolution, this will most likely be re-
stricted by radiation damage suffered by the sample. Long exposures to high-energetic
radiation may lead to different dissociation mechanisms, and eventually cause damage
to the sample, changing its micro- and nanostructure and preventing the visualiza-
tion/reconstruction of its smallest features. For this reason, X-ray imaging experiments
should simultaneously fulfil the minimum required dose for imaging and the maxi-
mum tolerable dose before “unacceptable degradation” of the sample.
Whereas the minimum required dose for imaging can be estimated from statistical cal-
culations such as Rose’s criterion [70], based on the signal-to-noise ratio, critical dose
and desired image contrast, the maximum tolerable dose on the other hand must be
inferred from experimental or simulation results. Howells et al. [66] predicted that the
best achievable resolution for an X-ray diffraction experiment, based on the contrast
between water and a protein is about 10 nm, and suggested that resolutions lower than
1 nm are unlikely even for heavy/radiation-hard materials. Based on their own meas-
urements, and other compiled results from the literature, Howells et al. suggested an
empirical simple linear relationship between maximum allowed dose and resolution
equal to 1.0 × 108 Gy/nm (Gray per nanometer of resolution).
Radiation damage effects can be mitigated in different ways, for example, by perform-
ing experiments at cryogenic temperatures, or by reducing the required dose (for a
given resolution) by means of contrast enhancing agents/strategies. When performing
X-ray tomographic experiments one may additionally optimize the scanning geometry
so that the radiation dose is equally distributed through the different voxels of the ob-

59
ject. In tomography the required dose can be further decreased and distributed (frac-
tioned) over the different projection angles as suggested by the dose fractionation the-
orem. This fundamental theorem introduced by Hegerl and Hoppe [71], and later veri-
fied by McEwen et al. [72] states that three-dimensional reconstructions require the
same integral dose as a single two-dimensional projection image for the same level of
statistical significance. A practical implication of this theorem is that “a statistically
significant 3D reconstruction can be obtained from projections which are not statistical-
ly significant at the limiting resolution” as pointed out by McEwen et al. [72]. Conse-
quently, three-dimensional phase-retrieval and tomographic reconstruction algorithms
as the one in [45], have the possibility to decrease acquisition times and radiation dos-
es, further increasing the limits of maximum obtainable resolution.
Resolution Enhancement of STXM-type techniques by probe deconvolution
The resolution in STXM-type techniques is primarily defined by the focal spot size of
the X-ray beam, whereas mechanical instabilities or drifts due to thermal effects dis-
play minor contributions. The technological advances in X-ray optics, noticeably in
refractive optics such as Fresnel Zone plates, have allowed increasingly smaller focus
sizes that will further enjoy the anticipated coherence of new synchrotron or FEL facili-
ties. The resolution in STXM imaging is in fact approaching competitive values to co-
herent diffractive imaging methods with reported resolutions of 15 nm in the soft X-ray
regime [73]. Furthermore, numerical methods can be used to enhance the spatial reso-
lution of the acquired images, by modelling the interaction between the sample and the
beam based on a priori knowledge of the illumination function. CDI methods such as
ptychography and its variants, available at high coherent sources, allow the reconstruc-
tion of the illumination function while simultaneously measuring a specimen. When
measurements are performed out of focus, propagation methods such as those de-
scribed in Chapter 2.6 can be further used to propagate and characterize the beam in-
tensity at its focal spot.
The performance of numerical algorithms, such as those based on “probe deconvolu-
tion”, is however mostly realized when the distance between two neighbouring scan-
ning positions is significantly smaller than the probe size. This condition is especially
relevant and verified in experiments where simultaneous X-ray ptychography and X-
ray fluorescence measurements are conducted. In these cases, the resolution of XRF
maps is mostly compromised by the large overlap between illuminations in different
scanning positions as is necessary for successful ptychography reconstructions and
may significantly benefit from further deconvolution data analysis. The deconvolution
of X-ray fluorescence maps using a reconstructed illumination function from
ptychography measurements has already been proposed and demonstrated in the lit-
erature, for example, by the work of Deng et al. [74], [75] with frozen-hydrated biologi-

60
cal specimens, where the spatial resolution of the measured fluorescence maps was
improved by a factor of 2. However, in their same work, the authors pointed out some
of the limitations of XRF deconvolution by the Wiener-filter deconvolution method [37]
as it requires additional knowledge of the spatial frequency distribution of the signal
and noise power. Besides, direct deconvolution methods rely on the application of
Fourier transforms that sample the acquired image in a uniform Cartesian grid. Alt-
hough the first demonstration of this method [74] was successfully done using a con-
tinuous-motion or fly-scan ptychography setup (with a uniform Cartesian scanning
grid), fly-scan data acquisition is not limited to regular grids and may take complex
scanning geometries so that the dwell time during the scanning motion can be mini-
mized [74], [76]–[78]. Just as importantly, uncertainties in the scanning positions and
variations in the illumination function during data acquisition posed additional chal-
lenges for probe deconvolution of XRF maps by Wiener-filter deconvolution [74].
On the other hand, numerical algorithms for image deconvolution based on iterative
methods have the possibility to account for specific noise models and include addi-
tional regularizations and constraints to improve the reconstructed image quality [79],
[80]. Motivated by this, during my PhD project we developed a method for enhancing
XRF maps from combined ptychography measurements, based on an optimization
problem that we solve by four analogous but different algorithms. This work was de-
veloped in collaboration with the NanoMAX beamline at MAX IV laboratory under the
EU project: MAX4ESSFUN Cross Border Network and Researcher Programme. The
developed tool was implemented in both MATLAB and Python and is available online
on NanoMAX GitHub repository under the URL
https://github.com/alexbjorling/nanomax-analysis-utils/tree/fmre.
Iterative deconvolution of XRF maps
The process of sampling a signal by a kernel function wider than its sampling period is
mathematically expressed by a convolution operation between the sampled signal and
a point spread function (PSF). As the measured XRF maps are proportional to the in-
coming X-ray beam intensity, the point spread function can in this case be described by
the intensity of the recovered probe function PSF = |𝑃(𝑥, 𝑦)|2. Iterative methods for
image deconvolution are already well established in the literature but implicitly as-
sume that the blurred image and PSF are expressed in the same grid, or in other words
that the data is not sparse. While the “resolution” of the illumination function recov-
ered by ptychography equals the reconstructed pixel size (equation (3.12)), the XRF
maps are expressed in a grid of lower resolution, equal to the distance between neigh-
bouring scanning points. To account for this, our method interpolates the XRF maps to
the ptychography image resolution at each iteration, facilitating also additional analy-
sis between both datasets. Since the process of convolution and sampling can be de-

61
scribed uniquely by linear operations in Euclidean space I have decided to formulate
the following mathematical models in terms of matrices and vectors operations mainly
due to its simple terminology. However our final implementation relied on functions
operators for a faster performance. In the following paragraphs, matrices or two-
dimensional arrays are represented by uppercase boldface letters, vectors by italic low-
ercase boldface letters and constants with plain italic letters.
Forward model description
Let 𝐗 ∈ ℝ𝑁×𝑀 and 𝐁meas ∈ ℝ𝑛×𝑚 represent a solution for the enhanced fluorescence
map (that we aim to reconstruct), and the measured fluorescence map respectively,
described in a 𝑁 ×𝑀 and 𝑛 ×𝑚 pixel grids. In order to handle a variety of applications,
it is common to represent 𝐗 and 𝐁meas in their vector form, when using linear algebra
for image operations [79]. The vector forms of 𝐗 and 𝐁meas can be obtained by rear-
ranging all the elements of the respective arrays in a single column vector. In other
words, 𝒙 = vec(𝐗) ∈ ℝ𝑁𝑀×1 and 𝒃meas = vec(𝐁meas) ∈ ℝ𝑛𝑚×1. The forward model that
describes the measurement operation, i.e. the convolution and sampling of a signal 𝒙 is
expressed as
𝒃exp = 𝐀𝒙, (3.53)
and returns the “expected” low-resolution fluorescence map 𝒃exp. In turn the system
matrix 𝐀 can be formulated as a composition of two linear operators: An operator 𝐂
that computes the two-dimensional convolution with the probe intensity function
�� = |𝑃(𝑥, 𝑦)|𝟐 ∈ ℝ𝑀×𝑁, and a sampling operator 𝐒 that maps ℝ𝑁𝑀×1 → ℝ𝑛𝑚×1 based on
the measured scanning positions
𝐀 = 𝐒 × 𝐂. (3.54)
Inverse problem description
The reconstruction of an enhanced fluorescence map is framed as an inverse problem
where one tries iteratively to find a solution for the problem 𝐀𝒙 = 𝒃meas by minimizing
the difference between the measured XRF maps 𝒃meas and those resulting from the
forward model (3.53) in a least-squares sense
𝒙∗ = argmin𝒙
1
2‖𝒃meas −𝐀𝒙‖2
2 , (3.55)
where the operator ‖∙‖2 represents the L-2 or Frobenius norm operator. Here we as-
sume that the XRF measurements contain sufficient statistics so that the noise in the
measurement can be modelled as white Gaussian noise as is implicit by the least-
squares minimization in (3.55). Additionally, two modified versions of (3.55) were also

62
tested and implemented by including the Tikhonov, and Total Variation (TV) regulari-
zation terms [79], [80]. In these cases:
𝒙Tik∗ = argmin
𝒙
1
2‖𝒃meas − 𝐀𝒙‖2
2 + 𝛼‖𝒙‖22 , (3.56)
𝒙TV∗ = argmin
𝒙
1
2‖𝒃meas − 𝐀𝒙‖2
2 + 𝛾2∑ ‖[∇𝒙]𝑖‖1𝑖 , 𝑖 = 1,2. (3.57)
In equation (3.56), while ‖𝒃meas − 𝐀𝒙‖22 is a measure of the goodness-of-fit, the Tikhonov
regularization term ‖𝒙‖22 aims to suppress the influence of noise that may otherwise
dominate the reconstruction process. Alternatively the discrete Total Variation of 𝒙,
defined as the L-1 norm of the sum of the gradient fields
TV(𝒙) = ∑ ‖[∇𝒙]𝑖‖12𝑖=1 , 𝑖 = 1,2 (3.58)
{[∇𝒙]1 = vec([𝐗𝑖,𝑗+1 − 𝐗𝑖,𝑗])
[∇𝒙]2 = vec([𝐗𝑖+1,𝑗 − 𝐗𝑖,𝑗]),
𝑖 = 1,2, … ,𝑀𝑗 = 1,2,… ,𝑁
. (3.59)
suppresses the effects of noise by penalizing large gradients in the image. Using the L-1
norm allows the existence of some steep gradients that can be helpful for the definition
of edges and enhancing non-sharp features [80]. In (3.56) and (3.57), 𝛼 and 𝛾 are known
as regularization parameters and control the weight between the data-fitting and regu-
larization terms of the cost-function.
To solve the problems (3.55), (3.56) and (3.57) I have used the conjugate gradient meth-
od with the Hestenes-Stiefel update formula [81]. The conjugate gradient method
(CGM) requires the system matrix 𝐀 to be symmetric positive definite which is not the
case of our problem. Instead of explicitly solving 𝐀𝒙 = 𝒃meas we make use of the nor-
mal equations
(𝐀T𝐀)𝒙 = 𝐀T𝒃meas, (3.60)
to fulfil the CGM prerequisite. Alternatively, (3.55) can be solved without relying on
the normal equations by means of the Landweber update scheme [82]. In this case the
algorithm iterates from an initial solution guess 𝒙𝐿[0] according to the expression
𝒙𝑳[𝒍+𝟏]
= 𝒙𝑳[𝒍]+𝜔𝑨𝑻 (𝒃 − 𝑨𝒙𝑳
[𝒍]) , 𝒍 = 𝟎, 𝟏, 𝟐, …, (3.61)
until a stopping criteria is verified. In the Landweber method the regularization of the
problem is defined, and can be controlled by, the number of iterations run and the reg-
ularization parameter 𝜔 ∈ ℝ that must satisfy 0 < 𝜔 < 2‖𝐀T𝐀‖2
−1= 2 𝜎1⁄ . Here 𝜎1 rep-
resents the first singular value of the system matrix 𝐀, that in fact is implemented using
function operations. For this reason 𝜎1 cannot be estimated from a simple SVD decom-
position but rather via the power method also known as Von Mises iteration [83] that

63
often converges in a few iterations (< 10). The details for the implementation of the
CGM algorithm can be found elsewhere [81], [84], but as the Landweber method, it
requires the definition of the transpose or adjoint operator 𝐀T. In our problem 𝐀T is
given by
𝐀T = 𝐂T × 𝑺T. (3.62)
The adjoint operator 𝐒T maps from the low-resolution to the high-resolution grid
ℝ𝑛𝑚×1 → ℝ𝑁𝑀×1 by means of a nearest-neighbour, cubic, or linear interpolation. To
implement the linear operator 𝐂 we relied on the convolution theorem that states that
the Fourier transform of a convolution between two functions is equal to the pointwise
multiplication of their Fourier transforms:
𝐂𝒙 ← ℱ−1 {ℱ{��}ℱ{𝐗}} . (3.63)
Here, ℱ represents the two-dimensional discrete Fourier transform executed by the
FFT algorithm [85]. The adjoint operator 𝐂T is implemented in an analogous way, but
using as a convolution kernel the probe intensity function rotated by 180°.
In summary, four different solutions for the deconvolution of XRF maps were pro-
posed and implemented. The use of the Wiener filter for probe deconvolution requires
a priori knowledge of the signal-to-noise ratio in the measurements and interpolation
operations that may introduced undesired artefacts. Iterative methods were seen to be
more robust than the Wiener deconvolution at the cost of an increase computational
time. An example of the proposed deconvolution methods to an XRF measured map is
presented in Figure 3.16 and Figure 3.17. All tested datasets showed a recognizable
improvement in terms of image quality and sharpness, with reduced noise levels and
Figure 3.16: Acquired Cr XRF map of the NanoMAX logo, acquired at the NanoMAX beamline in MAX-
IV. A total of 20 iterations were run for the Landweber, TV and Tikhonov methods, with respective
regularization parameters of 1.6, 0.05 and 0.5.

64
more distinguished features. We are confident that better results could be obtained
given a better estimate of the illumination function and the use of a large overlap be-
tween different scanning positions.
Figure 3.17: Enhanced fluorescence maps by the proposed methods in the regions of interest (details)
marked by dashed-lines squares in Figure 3.16.

65
4. X-ray Tomography “I do not know what I may appear to the world, but to myself I seem to have been only
like a boy playing on the seashore, and diverting myself in now and then finding a
smoother pebble or a prettier shell than ordinary, whilst the great ocean of truth lay all
undiscovered before me”.
Isaac Newton
The discovery of X-rays by Dr. Wilhelm Röntgen was responsible for the rise of a novel
imaging technique – projection radiography – that soon became popular and widely
used as a diagnostic procedure in the medical community. X-ray projections allow the
visualization of internal features of an object, but at the same time superimpose the
signals from different depths, making it hard to differentiate their relative position in-
side the specimen. The problem of determining a (cross-section) image from the meas-
urement of its projections is known as tomographic imaging or computed tomography
(CT), whilst the word tomography derives from the Ancient Greek τóµoς (“tomos” =
“slice”) and γράϕω (“grapho” = “to write”).
Two people are generally credited with the invention of computer tomography: Allan
MacLeod Cormack [86], [87] for his theoretical observations, and Godfrey Newbold
Hounsfield [88] for creating the first CT scanner in 1971. Their independent, but com-
plementary, work awarded them jointly the Nobel Prize in Physiology or Medicine in
1979. However, from a mathematical standpoint, a solution for the problem of recon-
structing a cross-section imaging from its angular projections dates back to the work of
Johann Radon in 1917 [89] with his introduction of the Radon transform (and its in-
verse). As it will be seen the inverse Radon transform can be used to reconstruct ana-
lytically cross-section images from a set of acquired projections, provided that the
measured signal is described by a line integral operator. For this reason, the application
of tomographic principles and reconstruction methods is not limited to the medical
community and spans numerous fields including non-destructive testing of engineer-
ing materials, geoscience (to explore oil and groundwater reservoirs) and astronomy
(to study properties of distant galaxies or stars).
The Radon transform
The Radon transform defines analytically the function resulting from a series of line
integrals through an image 𝑓(𝑥, 𝑦) at different offsets 𝑠 and angular orientations 𝜙
from the origin. To the set of data after application of the Radon transform we give the
name of sinogram. In order to write explicitly the Radon transform ℜ, one often relies

66
on the parametrization of the lines (through which the integral takes place), using the
angular parameter 𝜙 ∈ [0, 𝜋[ and offset parameter 𝑠 = 𝑥 cos𝜙 + 𝑦 sin𝜙 so that
ℜ{𝑓(𝑥, 𝑦)}(𝑠, 𝜙) = ∫ ∫ 𝑓(𝑥, 𝑦)𝛿(𝑠 − 𝑥 cos𝜙 + 𝑦 sin𝜙)d𝑥d𝑦+∞
−∞
+∞
−∞. (4.1)
Here in (4.1), 𝛿(∙) is the Dirac delta function. Let us also define a projection image 𝑝𝜙0
(or radiograph) as the values of the Radon transform for a given constant angular pa-
rameter 𝜙0 as
𝑝𝜙0 = ℜ{𝑓}(𝑠, 𝜙0). (4.2)
Examples of cross-section and projection images are illustrated in Figure 4.3. Please
note that the formulations in (4.1) and (4.2) represent line integrals over a two-
dimensional function, or image. Therefore, when referring to three-dimensional tomo-
graphic reconstructions 𝑓(𝑥, 𝑦) should be interpreted as a two-dimensional slice or
cross-section view (perpendicular to the rotation axis) of a three-dimensional volume.
Moreover, for a given orientation, or angular parameter 𝜙, the Radon transform con-
cerns only integrals over lines parallel to each other. Accordingly, its application in X-
ray tomography requires that projection images are recorded using X-rays in parallel
beam geometry. If X-rays are used in a different configuration, such as fan-beam or
cone-beam (see Figure 4.2), the tomographic reconstruction is still possible, either by
iterative methods, by the Feldkamp-Davis-Kress (FDK) algorithm [90] or by re-
projecting the measured radiographs in a corresponding parallel-beam configuration.
Figure 4.1: Representation of the Radon transform of a two-dimensional function for a given singular
angular parameter 𝝓. In this figure, the grayscale brightness relates linearly with the function values
(in arbitrary units).

67
Analytical tomographic reconstruction
The process of reconstructing a slice, or cross-section, from a measured sinogram is
known as tomographic reconstruction. There is almost an indefinite number of differ-
ent possibilities and algorithms that one may utilize for this task, but it is common to
categorize them in two different families: analytical and iterative methods.
Analytical methods for tomographic reconstruction aim to get an exact (or approxi-
mate) estimate of the function describing the cross-section by applying an inverse Ra-
don transform to the measured sinogram. Probably the most common method in this
family is known as filtered back-projection (FBP) and is best explained adopting the
Fourier slice theorem, also known as projection-slice or central slice theorem. The
Fourier slice theorem can be extended to any N-dimensional space, but for simplicity I
will refer only to the two-dimensional case, associated with the reconstruction of a
tomographic cross-section. The Fourier slice theorem states that the one-dimensional
Fourier transform of a projection 𝑝𝜙0 , taken at a given angle 𝜙0 , is equal to the two-
Parallel beam Fan beam Cone beam
Figure 4.2: Different beam geometries for acquisition of X-ray projections: parallel, fan and cone beam.
Cross-section Projection
Figure 4.3: (Simulated) projection and cross-section images from a three-dimensional phantom. In par-
allel beam geometry, X-ray projections can be interpreted as a superposition of all cross-sections per-
pendicular to the X-ray beam propagation direction, as it is expressed by the line integral in equation
(4.1). Consequently, information concerning depth in the specimen in lost, and the different cross-
sections (that compose the three-dimensional volume) must be reconstructed by tomographic recon-
struction algorithms.

68
dimensional Fourier transform of the function 𝑓(𝑥, 𝑦) sampled over a line (slice) pass-
ing through the origin and with an angle 𝜙0. This is better illustrated in Figure 4.4
where ℱ1 represents the one-dimensional Fourier transform, that should not be mistak-
en by the two-dimensional Fourier transform ℱ. Also, let us define a back-projection
operator, the adjoint of the Radon transform, as
ℜT{𝑝𝜙(𝑠)}(𝑥, 𝑦) = ∫ 𝑝𝜙(𝑥 cos𝜙 + 𝑦 sin𝜙)d𝜙𝜋
0. (4.3)
The derivation of the FBP method is already well established in the literature, and thus
I focus only on its major steps to demonstrate its clear relationship with the Fourier
slice theorem. We start by defining 𝑓(𝑥, 𝑦) = ℱ−1{ℱ{𝑓(𝑥, 𝑦)}}, and expressing it as a
Fourier integral. To fully exploit the Fourier slice theorem, it is convenient to express
the Fourier transform in polar coordinates (𝜔, 𝜙), which gives rise to a Jacobian 𝜔 in
the following expression:
𝑓(𝑥, 𝑦) = ∫ ∫ 𝐹(𝜔 cos𝜙 ,𝜔 sin𝜙)e2𝜋𝐢(𝜔 cos𝜙𝑥+𝜔sin𝜙𝑦)𝜔d𝜔d𝜙+∞
0
2𝜋
0. (4.4)
Here, in (4.4), 𝐹(𝜔 cos𝜙 ,𝜔 sin𝜙) represents the two-dimensional Fourier transform of
𝑓(𝑥, 𝑦) in polar coordinates. By using trigonometric identities, (4.4) can be re-written as
𝑓(𝑥, 𝑦) = ∫ ∫ 𝐹(𝜔 cos𝜙 ,𝜔 sin𝜙)e2𝜋𝐢(𝜔 cos𝜙𝑥+𝜔sin𝜙𝑦)|𝜔|d𝜔d𝜙+∞
0
𝜋
0. (4.5)
Finally, according to the Fourier slice theorem, 𝐹(𝜔 cos𝜙 ,𝜔 sin𝜙) is equal to the one-
dimensional Fourier transform of a projection taken at an angle 𝜙:
(a) (b) (c)
Figure 4.4: Illustration of the Fourier slice theorem: (a) two-dimensional function 𝒇(𝒙,𝒚), (b) amplitude
of the two-dimensional Fourier transform of 𝒇(𝒙,𝒚). The dashed line in (b) represents the slice over the
two-dimensional Fourier space passing through the origin and with an angle 𝝓𝟎. After inverting the
one-dimensional Fourier transform of the Fourier slice one obtains the same projection as if it was
computed by a series of line integrals with an angle 𝝓𝟎 as in Figure 4.1. The computed projections by
application of the Radon transform and Fourier slice theorem are represented in (c), where small devia-
tions between the functions are attributed to numerical errors/precision of interpolation operations.
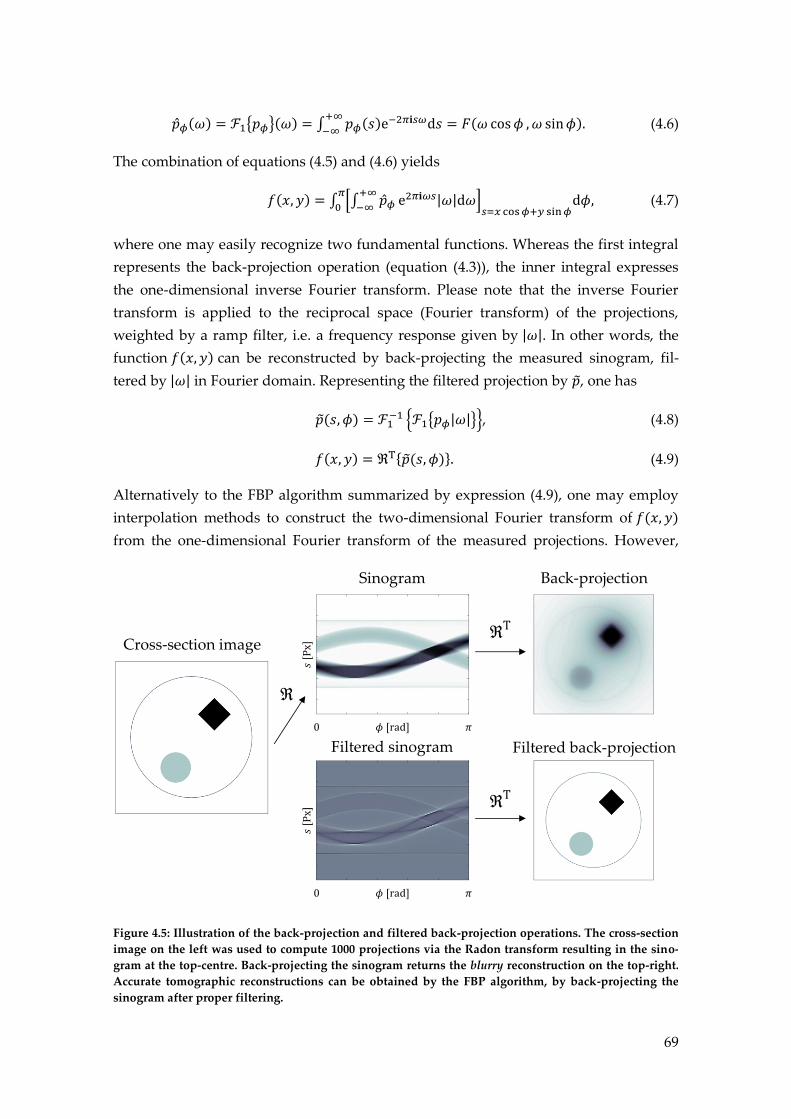
69
��𝜙(𝜔) = ℱ1{𝑝𝜙}(𝜔) = ∫ 𝑝𝜙(𝑠)e−2𝜋𝐢𝑠𝜔d𝑠
+∞
−∞= 𝐹(𝜔 cos𝜙 ,𝜔 sin𝜙). (4.6)
The combination of equations (4.5) and (4.6) yields
𝑓(𝑥, 𝑦) = ∫ [∫ ��𝜙+∞
−∞e2𝜋𝐢𝜔𝑠|𝜔|d𝜔]
𝑠=𝑥 cos𝜙+𝑦 sin𝜙d𝜙
𝜋
0, (4.7)
where one may easily recognize two fundamental functions. Whereas the first integral
represents the back-projection operation (equation (4.3)), the inner integral expresses
the one-dimensional inverse Fourier transform. Please note that the inverse Fourier
transform is applied to the reciprocal space (Fourier transform) of the projections,
weighted by a ramp filter, i.e. a frequency response given by |𝜔|. In other words, the
function 𝑓(𝑥, 𝑦) can be reconstructed by back-projecting the measured sinogram, fil-
tered by |𝜔| in Fourier domain. Representing the filtered projection by ��, one has
��(𝑠, 𝜙) = ℱ1−1 {ℱ1{𝑝𝜙|𝜔|}}, (4.8)
𝑓(𝑥, 𝑦) = ℜT{��(𝑠, 𝜙)}. (4.9)
Alternatively to the FBP algorithm summarized by expression (4.9), one may employ
interpolation methods to construct the two-dimensional Fourier transform of 𝑓(𝑥, 𝑦)
from the one-dimensional Fourier transform of the measured projections. However,
Sinogram
Filtered sinogram
Back-projection
Filtered back-projection
Cross-section image
Figure 4.5: Illustration of the back-projection and filtered back-projection operations. The cross-section
image on the left was used to compute 1000 projections via the Radon transform resulting in the sino-
gram at the top-centre. Back-projecting the sinogram returns the blurry reconstruction on the top-right.
Accurate tomographic reconstructions can be obtained by the FBP algorithm, by back-projecting the
sinogram after proper filtering.

70
such interpolation must account for the change between polar to Cartesian coordinates,
which may become an additional challenge in the Fourier domain even with advanced
methods such as cubic or spline interpolation. Examples of a sinogram, filtered sino-
gram and tomographic reconstruction are presented in Figure 4.5.
Analytical methods for tomographic reconstruction have some advantages when com-
pared to iterative methods. The FBP algorithm, for example, is based on Fourier trans-
forms (implemented with the FFT algorithm [85], [91]) and a single back-projection
which makes it conveniently fast. Besides, there are only few parameters one needs to
adjust, its derivation is based on an analytical inversion formula and the reconstruction
behaviour is well understood.
On the other hand, besides being limited to parallel beam geometry, the FBP algorithm
relies on projections measured along the full angular range [0, 𝜋[ with significant high
angular resolution. The minimum number of projections necessary for a faithful (ab-
sence of artefacts) tomographic reconstruction is traditionally given by the Crowther
criterion [92] in terms of the specimen’s size and expected spatial resolution. Instead,
the same sampling condition can be easily derived from the Nyquist sampling theorem
assuming that all projections are evenly distributed over the full angular range [0, 𝜋[.
Having in mind the Fourier slice theorem, it is natural to choose a minimum number of
projections 𝑚 so that the Fourier transform of 𝑓(𝑥, 𝑦) can be defined in all its pixels.
Considering the angular spacing between projections Δ𝜙 as illustrated in Figure 4.6b,
(a) (b) (c)
Figure 4.6: Angular sampling requirements for tomographic reconstruction, and different filtering
functions for FBP. (a) Illustration of 𝑭(𝝎𝐜𝐨𝐬𝝓 ,𝝎𝐬𝐢𝐧𝝓) in polar coordinates, as expressed by the Fouri-
er slice theorem. The FFT algorithm samples in a regular Cartesian grid and thus 𝑭(𝝎𝐜𝐨𝐬𝝓 ,𝝎𝐬𝐢𝐧𝝓)
must be interpolated onto a Cartesian grid as shown in (b). To prevent aliasing artefacts, all pixels in 𝑭
must be assigned, and thus the angular distance (arc length) between two adjacent pixels must be
smaller than 𝚫𝝓𝑵
𝟐 pixels. This observation is valid, assuming that the Fourier transform preserves the
same number of pixels and that the total number of projections cover 𝝅 radians, 𝒎 × 𝚫𝝓 = 𝝅. (c) Exam-
ples of different filtering functions for the FBP algorithm, and their representation in Fourier space.

71
then
𝑚 ≥𝜋𝑁
2 . (4.10)
Moreover, in analytical reconstruction methods only a modest amount of noise in the
acquired data is tolerated and a priori knowledge about the sample system, such as
non-negativity for example, cannot be exploited during reconstruction. The ramp filter
|𝜔| in the inversion formula (4.7) acts as a high-pass filter, which may be problematic
in the presence of noise, amplifying its contribution in the reconstructed image. In or-
der to handle noisy data, the FBP algorithm is often modified by including an addi-
tional (low-pass) filter such as a Hamming, Hann, Shepp-Logan or cosine filter [93], as
illustrated in Figure 4.6c.
Iterative tomographic reconstruction
Iterative or algebraic methods for tomographic reconstruction do not rely on analytical
inversion formulas as the FBP algorithm. Instead, an approximate solution of the
tomographic cross-section is obtained by solving the inverse problem associated with a
discretized description of the tomography forward model, given by the linear system of
equations:
𝐀𝒙 = 𝒃. (4.11)
Here, in (4.11), 𝐀 ∈ ℝ𝑀×𝑁 is the system matrix that may be interpreted as a discrete Ra-
don transform operator, 𝒙 ∈ ℝ𝑁 is the vector form of the cross-section image, and
𝒃 ∈ ℝ𝑀 the vector form of the sinogram‡‡‡. The tomographic reconstruction procedure
boils down to finding a solution 𝒙∗ for the system of equations (4.11) given a set of
measured projections 𝒃 = 𝒃meas. The problem of solving (4.11) for 𝒙 given a certain 𝒃,
belongs to the mathematical family of inverse problems [80], that in turn belongs to the
class of ill-posed problems whenever they violate at least one of Hadamard’s conditions:
The solution exists,
the solution must be unique,
and the solution depends continuously on the data, i.e. it is stable and a small
change in the data translates only into a small change in the solution.
The first two Hadamard’s requirements for well-posedness of (4.11) fail whenever 𝐀 is
not square, i.e. the problem is either under- or overdetermined. Furthermore, even in
cases where 𝐀 is invertible (the solution exists and is unique), the stability condition
‡‡‡ For notation simplicity, in this chapter 𝑁 and 𝑀 correspond to the size (in Pixels) of the vec-
tor forms of 𝒙 and 𝒃, while in the previous chapters 𝑁 was used to denote the lateral size of an
image.

72
may not hold due to the presence of noise in the measured data 𝒃meas. Consequently,
the naïve solution 𝒙∗ = 𝐀−1𝒃meas is often dominated by noise and does not provide any
useful information. For these reasons, ill-posed inverse problems are often solved by
introducing an additional regularity to the problem so that a unique and stable solu-
tion can be found. One way to deal with an inconsistent linear system of the type
𝐀𝒙 = 𝒃meas is to replace it by a least-squares minimization problem
𝒙∗ = argmin𝒙
1
2‖𝒃meas −𝐀𝒙‖2
2. (4.12)
Furthermore, different cost-functions can be used, based on different norms (for exam-
ple L-1 norm) or by introducing particular regularization terms, as it has been men-
tioned in Chapter 3 for the XRF probe deconvolution problem. Moreover, different
iterative methods can be employed to solve (4.12) and thus there are almost an infinite
number of possible algorithms that one may derive for tomographic reconstructions of
discrete datasets. For historical reasons, I present in this chapter two of the main classes
of iterative methods commonly used for tomographic reconstructions: the algebraic
reconstruction techniques (ART) and the simultaneous iterative reconstruction tech-
niques (SIRT).
The most well-known and common method of the ART class is perhaps the Kaczmarz
method [94] for solving linear systems of equations, introduced to the CT community
by Gordon et al. in 1970 [95]. Iterative methods of the this class are categorized as row-
action methods, since they treat the equations one at a time during the iterative recon-
struction [95], [96]. For this reason, ART methods are said to be fully sequential. The
Kaczmarz algorithm updates 𝒙 at each iteration 𝑙, from an initial solution guess 𝒙[0]
with the update step
𝒙𝑖[𝑙+1] = 𝒙𝑖
[𝑙] + 𝛼[𝑙+1]𝒃𝑖meas−𝑎𝑖
T𝒙𝑖[𝑙]
‖𝑎𝑖‖22 𝑎𝑖 , 𝑙 = 1,2, … 𝑖 = 1,2,…𝑁, (4.13)
where 𝑎𝑖T represents the 𝑖th row of the system matrix 𝐀, and 𝛼 is a relaxation parameter
in the range ]0,2[. If the system of equations (4.11) is consistent, i.e. there is at least one
solution that verifies all the equations, then the Kaczmarz iteration method converges
to a solution 𝒙∗ that minimizes the L-2 norm in (4.12), provided that the initial solution
guess 𝒙[0] is the zero vector or belongs to the column space of 𝐀 [97].
Reconstruction methods of the SIRT class are distinguished from ART in the sense that
all elements of 𝒙 are updated simultaneously at each iteration step. In this case, the
solution for 𝒙 is updated at each iteration according to the formula
𝒙[𝑙+1] = 𝒙[𝑙] + 𝐂𝐀T𝐑(𝒃meas − 𝐀𝒙[𝑙]), 𝑙 = 1,2,… (4.14)

73
where 𝐂 and 𝐑 are symmetric positive matrices, that may be chosen differently to ob-
tain different regularized solutions. In (4.14) 𝐀T represents the back-transform opera-
tor. The cost-function of SIRT methods is also different from ART, as one minimizes a
weighted norm of the residual vector instead of the L-2 norm as defined in (4.12). This
way, for SIRT reconstruction algorithms:
𝒙∗ = argmin𝒙
1
2‖𝒃meas − 𝐀𝒙‖𝐑
2 , (4.15)
where ‖∙‖𝐑 denotes the weighted norm of a vector so that ‖𝒙‖𝐑2 = 𝒙T𝐑𝒙. In the classical
SIRT algorithm [96], [98], 𝐂 and 𝐑 are diagonal matrices containing the inverse sum of
the columns and rows of the system matrix so that 𝐂𝑗,𝑗 = 1 ∑ 𝐀𝑖,𝑗𝑖⁄ , and 𝐑𝑖,𝑖 = 1 ∑ 𝐀𝑖,𝑗𝑗⁄ .
Such matrices aim to compensate for the number of rays that hit each pixel of the im-
age and the number of pixels that are hit by each ray. If 𝐂 and 𝐑 are chosen as the iden-
tity matrix, then the update formula in (4.14) reduces to the Landweber iteration
scheme as in Chapter 3. Other variants include the Cimmino’s method, component
averaging (CAV) and diagonally relaxed orthogonal projection (DROP).
The main advantage of iterative methods compared to analytical reconstruction tech-
niques include their capability of returning faithful tomographic reconstructions in the
presence of noise or incomplete projection data. Besides, iterative methods allow the
introduction of prior information about the sample, such as non-negativity, and differ-
ent regularization strategies that may be helpful in mitigating reconstruction artefacts
and to decrease noise effects while preserving sharp edges in the image. Moreover,
dead pixels or phase residues can be excluded from the reconstruction process that
otherwise would introduce undesired artefacts. On the other hand, the major draw-
back of iterative methods is associated to their higher computation time sas each itera-
Phase-residue
Wrapped sinogram Sinogram derivative Derivative FBP
Figure 2: Tomographic reconstruction of a sinogram with phase wrapping by the modified filtered
back-projection algorithm proposed by Guizar et al. [99]. For demonstration purposes a phase-residue
was simulated by setting one pixel of the sinogram to 0 that after tomographic reconstruction translates
into a streak artefact as seen in the image on the right.

74
tion requires both a forward- and back-projection operation.
The application of analytical or algebraic reconstruction methods to X-ray projections is
straightforward as long as the measured data can be described by the linear system of
equations in (4.11). In the specific case of phase-contrast projections, provided by CDI
techniques, equation (4.11) breaks in pixels with phase-wrapping, and thus an addi-
tional phase unwrapping operation is required as already mentioned in Chapter 3. Al-
ternatively to phase unwrapping before tomographic reconstruction, a modified ver-
sion of the FBP algorithm has been devised by Guizar et al. [99] that makes use of the
sinogram derivative insensitive to phase-wrapping. The successful implementation of
this method requires that the phase gradients are not wrapped, or in other words, that
the difference in phase between two adjacent pixels in a projection is smaller than 𝜋.
However, the presence of phase-residues impedes a proper evaluation of the sinogram
gradient and consequently propagate as artefacts in the reconstructed tomogram. On
the other hand, iterative reconstruction methods have the ability to mask out, or to ex-
clude, faulty pixels, such as phase-residues, but do not necessarily take into account the
presence of phase-wrapping in the projection data. To deal with phase-wrapped pro-
jections we proposed that iterative reconstruction methods can be modified by intro-
ducing a wrapping operator in the residual vector before the solution update step [9]. In
our studies the wrapping operator 𝑄(𝑓) was implemented as
𝑄(𝑓) = arg[e𝐢𝑓]. (4.16)
Despite being a non-linear operator, we have empirically observed that our modified
version of the SIRT algorithm equipped with the wrapping operator in (4.16) and the
non-negativity constraint was able to retrieve accurate tomographic reconstructions
from wrapped phase-contrast sinograms. Although no general proof of convergence
has been so far derived, we have seen that our method requires that the projections are
only moderately wrapped, and that the reconstruction procedure is dominated by the
non-wrapped areas of the sinogram. An example of a tomographic reconstruction from
a wrapped sinogram is presented in Figure 4.7 using the derivative FBP algorithm, and
Figure 4.8 using the proposed phase-SIRT algorithm.
Tomographic alignment of high-resolution phase-contrast projections
So far, the methods described for tomographic reconstruction assume a precise
knowledge of the relative spatial orientation between projections, and location of the
tomographic rotation axis. In macro- or micro-CT applications this condition is easily
achieved using highly accurate and stable rotation stages. However, nano-tomographic
techniques based on high-resolution projection imaging methods, pose an additional
challenge as the positioning precision is limited by mechanical stabilities and sample

75
drifts caused by thermal effects [9], [100], [101]. For this reason, high-resolution elec-
tron tomography and X-ray nano-tomography rely on numerical registration (align-
ment) of projection images preceding tomographic reconstruction. There is a large va-
riety of tomographic alignment algorithms already described in the literature [102]–
[107] that make use of fiducial markers introduced in the sample, such as gold nano-
particles, or exploit other intrinsic properties between projections, such as cross-
correlation or centre-of-mass alignment methods. However, most of these methods are
user-dependent, relying on manual interaction and visual inspection that may impede
efficient data processing, especially given the ever increasing data sizes and acquisition
rates provided by synchrotron facilities. During my PhD studies we have introduced
an automated tomographic alignment algorithm that we showed to be able to estimate
and correct for translational and angular deviations of the expected sample positions.
Our proposed method has demonstrated promising results, in terms of three-
dimensional resolution enhancement, with simulated and real datasets. More details
about this work can be found in the Appendix under Automated angular and transla-
tional tomographic alignment and application to phase-contrast imaging or equiva-
lently in [9] and references therein.
Figure 4.8: Tomographic reconstruction of a wrapped sinogram (from Figure 4.7) at different iterations
using the classical SIRT, and phase-SIRT algorithms. Both reconstructions were done without non-
negativity constraint and by masking out (excluding) the pixel associated with a phase-residue. The
colour scale in each image was set from the minimum to maximum value of the reconstructed slice. The
introduction of the wrapping operator in the residual vector allowed the phase-SIRT algorithm to re-
turn accurate reconstructions in the presence of phase-wrapping, and the streak artefact is avoided by
excluding the phase-residue from the reconstruction procedure.

76
Combined three-dimensional phase retrieval and tomographic recon-
struction of scanning coherent diffraction imaging techniques
To date, the application of scanning CDI techniques to three-dimensions involves two-
dimensional ptychography reconstructions of the acquired projections precedent to
tomographic alignment and reconstruction. Motivated by the dose fractionation theo-
rem and resolution limitations due to radiation damage, as referred in Chapter 3, we
have extended scanning coherent diffraction imaging reconstructions to three-
dimensions. As both ptychography and tomographic reconstructions can be formulat-
ed as discrete inverse problems, we have tested the possibility of combining both re-
construction processes in a single non-linear optimization algorithm. To avoid an un-
necessary repetition of the description of our method I refer to the published work in
Annex or under the reference [45].

77
5. Multimodal techniques for the
characterization of solar cells “The role of the infinitely small in nature is infinitely great”.
Louis Pasteur
This chapter is devoted to reporting our experimental results from X-ray measure-
ments combining three different, but complementary, scanning techniques, namely X-
ray ptychography, XRF, and XBIC for the characterization of third-generation
Cu2ZnSnS4 (CZTS) kesterite solar cells.
As mentioned in Chapter 1, solar energy has a great potential to fulfil our energy needs
in the future given that we have the technology available to harvest it with reasonable
efficiency. The main advantage of thin film photovoltaics arises from the direct band
gap of the materials that constitute the active layer, which allows the use of a smaller
amount of materials, when compared to crystalline silicon solar cells. Consequently,
thin film solar cells can be fabricated on flexible substrates, opening a window for nov-
el technological applications, at the same time yielding lower production costs and
energy payback time. From the family of thin film photovoltaics, kesterite solar cells
based on the quaternary inorganic semiconductor Cu2ZnSnS4, distinguishes itself from
CdTe and CIGS (CuInxGa(1-x)Se2) technologies, by avoiding the use of scarce elements
such as In and Te, and highly toxic materials such as Cd, while still providing high
absorption coefficients (> 104 cm−1) and an ideal band gap (~1.45 eV) for visible light
absorption.
One of the major challenges in the development of high efficiency CZTS solar cells is
associated with its complex stoichiometry that promotes the formation of secondary
phases during its synthesis and annealing process [108]. These, from which ZnS, SnS2
or Cu2S are examples, are detrimental for solar cell operation, reducing its overall con-
version efficiency, and therefore should be avoided or controlled during manufactur-
ing. To investigate the local performance and relationship between chemical composi-
tion, charge collection efficiency and grain boundaries in a fully functional solar cell,
we suggest the complementary use of X-ray ptychography, XRF and XBIC techniques.
XBIC has already been applied to first-generation [109] and recently to second-
generation solar cells in combination with X-ray fluorescence measurements [52], from
which a correlation between the local chemical composition and device charge collec-
tion efficiency was derived. However, the same study has not been applied to kesterite

78
devices so far, to our knowledge, neither in combination with X-ray ptychography for
the imaging of fine structures or grain boundaries.
Sample preparation
The CZTS solar cell investigated in this experiment, with a demonstrated conversion
efficiency of 5.2%, was already characterized and published in the literature under the
reference [110], where a more detailed description about the device and its preparation
method can be found. The full device consists of a layered structure as shown in Figure
5.1. A Mo bilayer, serving as bottom electrode, was first deposited onto a soda lime
glass substrate by DC magnetron sputtering at 10 W/cm2 power density. On the bottom
electrode, kesterite precursors (Cu, Sn and Zn) were deposited by pulsed laser deposi-
tion (PLD) [111] under high vacuum (< 5 × 10−6 mbar), with a KrF excimer laser with
a wavelength of 248 nm, a fluence of 0.6 J/cm2 and a spot size of 4 mm2. In order to
form Cu2ZnSnS4, the metallic precursors must undergo an annealing step. In this case,
this was performed at 560°C in a rapid thermal processor in the presence of S and SnS
powder. A thin buffer layer of CdS was applied by chemical bath deposition, followed
by a ZnO window layer by RF magnetron sputtering. Finally, a layer of indium doped
tin oxide (ITO) serving as top electrode was applied by sputtering followed by evapo-
ration of a thin layer of MgF that acts as anti-reflective coating of the solar cell. From
the fully functional CZTS device, two different samples were prepared for our experi-
ment:
A Top-view sample was prepared by removing most of the soda lime glass sub-
strate by mechanical polishing, so that the sample is sufficiently thin to be im-
aged by ptychography. This sample was designed for combined ptychography
and XRF measurements in order to visualize the interface between different
grains, and to identify possible secondary chemical phases over a significant
(b)
-
+
(a)
Figure 5.1: (a) Schematics of the lamella sample and devised electrical contacts. (b) cross-section SEM
image of the different layers composing the solar cell (SEM image provided courtesy of Dr. Andrea
Crovetto).

79
large area.
A cross-section sample intended for Ptychography, XRF, and XBIC measure-
ments, consisting of a lamella of ca. 1 µm thickness was prepared by focused
ion beam (FIB) etching and is illustrated in Figure 5.1.
Experiment description
The ptychography, XRF and XBIC measurements were carried out at the hard X-ray
nano-probe beamline P06 at PETRA III at the German Electron Synchrotron (Deutsches
Elektronen-Synchrotron, DESY). In order to highlight the main constituents of the solar
cell active layer (Cu, Zn, Sn and S) and monitor the possible Ga deposition from the FIB
etching an X-ray beam energy of 10.4 keV was used with an average focus size of 60
nm (FWHM).
The samples were placed on a piezo stage, which allows both rotation and translations,
and is controlled by an interferometric positioning system composed by three different
laser sources. In order to reduce self-absorption effects, the samples were positioned
with an angle of 23° with respect to the fluorescence detector (Xspress 3) at a distance
of 2-3 cm. All measurements were done at the beam focus, with acquisition times vary-
ing from 10 ms to 100 ms, covering different areas of the samples with fields of view
ranging from 1 × 1 µm to 40 × 40 µm. The diffraction data were acquired at a distance
of 2.31 m with a PILATUS 1M detector. In practice, the effective detector area used for
ptychography reconstructions was 512 × 512 pixels which results in a ptychography
reconstructed pixel size of 7.2 nm. XBIC measurements were formed using the same
configuration as in Figure 3.13, with the aid of a lock-in amplifier with an amplification
gain of 1kV/mA and an optical chopper with a chopping frequency of 367 Hz. Aside
from the described samples, a standard reference sample RF11-200-S3236 by AXO was
measured using XRF, as it is required for proper quantification of the different ele-
ments mass concentration in the sample. The reference sample consisted of a 200 nm
ElasticScatteringW
Cu
Mo
Sr
W
Ar
K
Ca
La
Fe
Ni
Pb
Si
ElementNominal mass
fraction(ng/mm2)
Measured mass fraction
(ng/mm2)
Relative difference
(%)
Pb 77.8±3.7 40.29 48
La 117.0±10.9 108.9 7
Pd 27.7±2.9 27.07 3
Mo 8.3±0.1 25.38 206
Cu 22.1±1.9 22.14 0.2
Fe 39.6±4.4 38.26 0
Ca 166.1±7.2 155 7
Figure 5.2: On the left: XRF spectra and elemental fitting of the standard RF11-200-S3236. On the right:
expected and measured mass fractions for the elements in the standard sample.

80
thick SiN2 substrate membrane where 7 elements (Pb, La, Pd, Mo, Cu, Fe and Ca) were
deposited in extremely thin layers (ca. 1-3 atomic layers). The mass fractions of these
elements are in the range of ng/mm2, as shown in the table in Figure 5.2.
Technical challenges
During data acquisition we faced different challenges that prevented us from success-
fully applying the three proposed scanning techniques to the cross-section sample. The
electrical contacts prepared before the experiment turned out to be faulty during data
acquisition. Furthermore the optical chopper was found to be misaligned with the in-
coming beam at the very end of the experiment. At the same time a significant drop in
the beam flux was observed that we attributed to a misalignment of an optic compo-
nent (order sorting aperture). To solve these problems we decided to remove the order
sorting aperture which modified the incoming beam parameters returned by the fun-
damental parameters calibration approach for XRF. To replace the lamella sample with
faulty contacts we chose to perform XBIC measurements on a macroscopic sample ex-
tracted from a different solar cell device that has not been so far characterized. This is
referred to as backup top-view sample in Figure 5.6. The electric contacts were connect-
ed before the experiment with the help of Dr. Michael Stuckelberger without whom
this experiment would not have been possible.
Data analysis
Ptychography reconstructions were obtained with 1000 iterations of the ePIE algo-
rithm. The XRF spectra were fitted using the software PyMca [112], developed at the
European Synchrotron Radiation Facility (ESRF). The elemental quantification fol-
CuZn
CuFe
Zn
Sn
In
K
Cd
ArCl
S
Mo
Sr
Figure 5.3: Example of XRF spectra and elemental fitting of a scan from the top-view sample.

81
lowed the fundamental parameters approach described in Chapter 3. For the top-view
sample a matrix correction was applied to account for self-absorption effects in the
sample layered structure. Besides the elements that constitute the sample, additional
elements were included in the data fitting procedure to account for the experimental
setup, namely Ar, W, Ni, Cl, Sr and K. Furthermore, the Be window of the flight tube,
the Si detector, and the air between the sample and the XRF detector were included as
attenuators. The spectrum background was approximated using the statistics-sensitive
non-linear iterative peak clipping (SNIP) algorithm. The fundamental parameters were
then estimated, taken into account the XRF detector active area (4 cm2) and the angles
between incoming beam, sample and XRF detector. This calibration resulted in an es-
timated flux of 1.39 × 108 photons/s, so that the measured concentrations of the majori-
ty of elements of the standard sample are in best agreement with their expected values.
The large deviations for Mo and Pb as shown in Figure 5.2 are justified by the low in-
tensity values at their corresponding emission lines which yields large errors during
data fitting.
For the top-view sample, when accounting for self-absorption effects by matrix correc-
tion, PyMca is not able to properly assign mass concentrations to a given element if this
is present in more than one of the layers. This is of special relevance for Zn, as it ap-
pears in both ZnO and CZTS layers. Instead, the computed mass-fractions correspond
to the values expected if all Zn was present in only one of the 2 layers. For this reason,
a correction factor was applied to the Zn mass fractions in the CZTS layer based on the
theoretical values (estimated from the thickness and density of ZnO and CZTS) of the
ratio between total Zn mass in the ZnO and CZTS respectively.
Results
All collected XRF maps exhibits a non-uniform distribution of the elements composing
the CZTS layer. For brevity only the Cu and Zn maps are here illustrated. Two exam-
ples of the Zn and Cu mass concentration maps are presented in Figure 5.4 and Figure
5.5 for the top-view and lamella sample respectively. Specifically, Figure 5.5 shows the
presence of a ZnS grain, one of the detrimental phases that is known to decrease the
overall solar cell device.
For the reasons already mentioned, XBIC measurements were performed in a wide
field of view (1 × 1 μm2) for which the Zn and Cu mass fractions could not be properly
determined. The XBIC map in Figure 5.6 is thus compared with the total recorded fluo-
rescence counts and the Zn fluorescence counts. At this scale, the XBIC and XRF maps
are well correlated in the active areas of the solar cell, whereas the absence of the XBIC
signal is explained by the lack of top layers that compose one of the electrodes.

82
Conclusions
CZTS solar cell active layers were investigated using XRF, ptychography and XBIC to
distinguish between different chemical phases and to correlate them locally with the
solar cell device efficiency. The acquired XRF maps show a heterogeneous distribution
of the elements composing the CZTS active layer, a factor that should be avoided to
Figure 5.4: Phase shift, reconstructed from ptychography data, Zn and Cu mass-fractions for a scan of
the top-view sample. The contrast provided by the ptychography phase reconstruction relates mostly
with the thickness variations of the specimen also indicating possible grain boundaries. So far, a clear
correlation between the ptychography phase, Zn and Cu XRF maps is still to be found and fully under-
stood.
Figure 5.5: Phase shift, reconstructed from ptychography data, Zn and Cu mass-fractions for a scan of
the lamella sample. The acquired XRF maps suggest the presence of a ZnS grain in the CZTS active
layer, which may be responsible for local shunts and a decrease of the device overall efficiency.
Figure 5.6: XBIC, total XRF and Zn XRF counts for the backup top-view sample.

83
minimize the formation of secondary phases during the annealing process. This indi-
cates that there is still room for improvement during the synthesis of the CZTS active
layer of third-generation solar cells.
The ptychography reconstructions of the lamella sample did not exhibit clear grain
boundaries that correlate with the presence of a ZnS grain. Nonetheless, its high-spatial
resolution allows for local determination of the different layer thicknesses that may be
used to refine the XRF matrix correction setup.
Since the chemical heterogeneities of the sample are mostly observed at the micrometre
scale, the acquired XBIC maps did not contain enough resolution to observe a correla-
tion between charge collection efficiency and the local chemical composition of the so-
lar cell. Nonetheless, a good contrast between the active areas of the device and those
without the top electrode was observed suggesting that XBIC can be directly applied
for the study of third-generation solar cells, given that a sufficiently high spatial resolu-
tion can be obtained.

84
Bibliography [1] B. P. Company, “BP Statistical Review of World Energy 2018,” 2018.
[2] G. Janssens-Maenhout et al., “Global Greenhouse Gases Emissions EDGAR
v4.3.2.” [Online]. Available:
http://edgar.jrc.ec.europa.eu/overview.php?v=432&SECURE=123. [Accessed: 20-Aug-
2008].
[3] G. Janssens-Maenhout et al., “EDGAR v4.3.2 Global Atlas of the three major
Greenhouse Gas Emissions for the period 1970-2012,” Earth Syst. Sci. Data Discuss., no.
August, pp. 1–55, 2017.
[4] Stocker and V. B. and P. M. M. (eds. . T.F., D. Qin, G.-K. Plattner, M. Tignor,
S.K. Allen, J. Boschung, A. Nauels, Y. Xia, “Summary for Policymakers. In: Climate
Change 2013: The Physical Science Basis. Contribution of Working Group I to the Fifth
Assessment Report of the Intergovernmental Panel on Climate Change,” CEUR
Workshop Proc., vol. 1542, pp. 33–36, 2015.
[5] R. Perez and M. Perez, “A Fundamental Look At Supply Side Energy Reserves
For The Planet,” Int. Energy Agency SHC Program. Sol. Updat., vol. 62, no. April 2009,
pp. 4–6, 2015.
[6] N. Espinosa, M. Hösel, D. Angmo, and F. C. Krebs, “Solar cells with one-day
energy payback for the factories of the future,” Energy Environ. Sci., vol. 5, no. 1, pp.
5117–5132, 2012.
[7] R. Søndergaard, M. Hösel, D. Angmo, T. T. Larsen-Olsen, and F. C. Krebs,
“Roll-to-roll fabrication of polymer solar cells,” Mater. Today, vol. 15, no. 1–2, pp. 36–49,
2012.
[8] S. Westenhoff, I. A. Howard, and R. H. Friend, “Probing the morphology and
energy landscape of blends of conjugated polymers with sub-10nm resolution,” Phys.
Rev. Lett., vol. 101, no. 1, pp. 1–4, 2008.
[9] T. Ramos, J. S. Jørgensen, and J. W. Andreasen, “Automated angular and
translational tomographic alignment and application to phase-contrast imaging,” J.
Opt. Soc. Am. A, vol. 34, no. 10, pp. 1830–1843, 2017.
[10] P. Pellat-Finet, “Fresnel diffraction and the fractional-order Fourier transform,”
Opt. Lett., vol. 19, no. 18, p. 1388, 1994.
[11] C. J. R. Sheppard, “Free-space diffraction and the fractional fourier transform,”
J. Mod. Opt., vol. 45, no. 10, pp. 2097–2103, 1998.
[12] D. Mas, C. Ferreira, and J. Garcia, “Fresnel diffraction calculation through the
fast fractional Fourier transform,” Proc. SPIE, vol. 3490, pp. 461–464, 1998.

85
[13] R. W. Gerchberg and W. O. Saxton, “A practical algorithm for the
determination of phase from image and diffraction plane pictures,” Optik (Stuttg)., vol.
35, no. 2, pp. 237–246, 1972.
[14] J. R. Fienup, “Reconstruction of an object from the modulus of its Fourier
transform,” Opt. Lett., vol. 3, no. 1, p. 27, 1978.
[15] D. Sayre, “Some implications of a theorem due to Shannon,” Acta Crystallogr.,
vol. 5, no. 6, pp. 843–843, 1952.
[16] J. M. Rodenburg, “Ptychography and related diffractive imaging methods,”
Adv. Imaging Electron Phys., vol. 150, no. 07, pp. 87–184, 2008.
[17] J. M. Rodenburg, “A simple model of holography and some enhanced
resolution methods in electron microscopy,” Ultramicroscopy, vol. 87, no. 3, pp. 105–121,
2001.
[18] A. V. Martin et al., “X-ray holography with a customizable reference,” Nat.
Commun., vol. 5, pp. 1–8, 2014.
[19] T. Warwick et al., “A scanning transmission x-ray microscope for materials
science spectromicroscopy at the advanced light source,” Rev. Sci. Instrum., vol. 69, no.
8, pp. 2964–2973, 1998.
[20] J. Lawrence et al., “Scanning transmission X-ray , laser scanning , and
transmission electron microscopy mapping of the exopolymeric matrix of microbial
biofilms,” Appl. Environ. Microbiol., vol. 69, no. 9, pp. 5543–5554, 2003.
[21] W. Hoppe, “Beugung im inhomogenen Primärstrahlwellenfeld. I. Prinzip einer
Phasenmessung von Elektronenbeungungsinterferenzen,” Acta Crystallogr. Sect. A, vol.
25, no. 4, pp. 495–501, 1969.
[22] W. Hoppe and G. Strube, “Beugung in inhomogenen Primärstrahlenwellenfeld.
II. Lichtoptische Analogieversuche zur Phasenmessung von Gitterinterferenzen,” Acta
Crystallogr. Sect. A, vol. 25, no. 4, pp. 502–507, 1969.
[23] W. Hoppe, “Beugung im inhomogenen Primärstrahlwellenfeld. III.
Amplituden‐ und Phasenbestimmung bei unperiodischen Objekten,” Acta Crystallogr.
Sect. A, vol. 25, no. 4, pp. 508–514, 1969.
[24] R. Hegerl and W. Hoppe, “Dynamische Theorie der Kristallstrukturanalyse
durch Elektronenbeugung im inhomogenen Primärstrahlwellenfeld,” Berichte der
Bunsengesellschaft für Phys. Chemie, vol. 74, no. 11, pp. 1148–1154, 1970.
[25] P. W. Hawkes, Advances in Imaging and Electron Physics, vol. 150. 2008.
[26] M. Dierolf et al., “Ptychographic coherent diffractive imaging of weakly
scattering specimens,” New J. Phys., vol. 12, 2010.

86
[27] P. Thibault, M. Dierolf, A. Menzel, O. Bunk, C. David, and F. Pfeiffer, “High-
resolution scanning x-ray diffraction microscopy.,” Science, vol. 321, no. 5887, pp. 379–
82, 2008.
[28] H. M. L. Faulkner and J. M. Rodenburg, “Error tolerance of an iterative phase
retrieval algorithm for moveable illumination microscopy,” Ultramicroscopy, vol. 103,
no. 2, pp. 153–164, 2005.
[29] J. R. Fienup, “Phase retrieval algorithms: a comparison,” Appl. Opt., vol. 21, no.
15, pp. 2758–2769, 1982.
[30] O. Bunk, M. Dierolf, S. Kynde, I. Johnson, O. Marti, and F. Pfeiffer, “Influence of
the overlap parameter on the convergence of the ptychographical iterative engine,”
Ultramicroscopy, vol. 108, no. 5, pp. 481–487, 2008.
[31] P. W. Hawkes, Advances in Imaging and Electron Physics. 2010.
[32] R. H. T. Bates and J. M. Rodenburg, “Sub-ångström transmission microscopy: A
fourier transform algorithm for microdiffraction plane intensity information,”
Ultramicroscopy, vol. 31, no. 3, pp. 303–307, 1989.
[33] H. N. Chapman, “Phase-retrieval X-ray microscopy by Wigner-distribution
deconvolution,” Ultramicroscopy, vol. 66, no. 3–4, pp. 153–172, 1996.
[34] H. M. L. Faulkner and J. M. Rodenburg, “Movable aperture lensless
transmission microscopy: A novel phase retrieval algorithm,” Phys. Rev. Lett., vol. 93,
no. 2, pp. 023903-1, 2004.
[35] J. M. Rodenburg and H. M. L. Faulkner, “A phase retrieval algorithm for
shifting illumination,” Appl. Phys. Lett., vol. 85, no. 20, pp. 4795–4797, 2004.
[36] M. J. Dierolf, “Ptychographic X-ray Microscopy and Tomography,” 2015.
[37] A. T. Walden, “Robust deconvolution by modified Wiener filtering,” Geophysics,
vol. 53, no. 2, pp. 186–191, 1988.
[38] A. M. Maiden and J. M. Rodenburg, “An improved ptychographical phase
retrieval algorithm for diffractive imaging,” Ultramicroscopy, vol. 109, no. 10, pp. 1256–
1262, 2009.
[39] V. Elser, I. Rankenburg, and P. Thibault, “Searching with iterated maps,” Proc.
Natl. Acad. Sci., vol. 104, no. 2, pp. 418–423, 2007.
[40] P. Thibault, M. Dierolf, O. Bunk, A. Menzel, and F. Pfeiffer, “Probe retrieval in
ptychographic coherent diffractive imaging,” Ultramicroscopy, vol. 109, no. 4, pp. 338–
343, 2009.
[41] B. Enders and P. Thibault, “Ptypy: Ptychography reconstruction for Python.”
2014.

87
[42] M. Guizar-Sicairos and J. R. Fienup, “Phase retrieval with transverse translation
diversity : a nonlinear optimization approach Abstract :,” Opt. Express, vol. 16, no. 10,
pp. 9954–9962, 2008.
[43] R. Hesse, D. R. Luke, S. Sabach, and M. K. Tam, “Proximal Heterogeneous
Block Input-Output Method and application to Blind Ptychographic Diffraction
Imaging,” vol. 8, no. 1, pp. 426–457, 2014.
[44] M. Odstrčil, A. Menzel, and M. Guizar-Sicairos, “Iterative least-squares solver
for generalized maximum-likelihood ptychography,” Opt. Express, vol. 26, no. 3, p.
3108, 2018.
[45] T. Ramos, B. E. Grønager, M. S. Andersen, and J. W. Andreasen, “Direct 3D
Tomographic Reconstruction and Phase-Retrieval of Far-Field Coherent Diffraction
Patterns,” Pre-print, 2018.
[46] G. Zheng, R. Horstmeyer, and C. Yang, “Wide-field, high-resolution Fourier
ptychographic microscopy,” Nat. Photonics, vol. 7, no. 9, pp. 739–745, 2013.
[47] J. Sun, C. Zuo, J. Zhang, Y. Fan, and Q. Chen, “High-speed Fourier
ptychographic microscopy based on programmable annular illuminations,” Sci. Rep.,
vol. 8, no. 1, pp. 1–12, 2018.
[48] J. Sun, C. Zuo, L. Zhang, and Q. Chen, “Resolution-enhanced Fourier
ptychographic microscopy based on high-numerical-aperture illuminations,” Sci. Rep.,
vol. 7, no. 1, pp. 1–11, 2017.
[49] J. Sherman, “The theoretical derivation of fluorescent X-ray intensities from
mixtures,” Spectrochim. Acta, vol. 7, pp. 283–306, 1955.
[50] N. Carulina, “Monte Carlo simulation of the X-ray fluorescence excited by
discrete energy photons in homogeneous samples including tertiary inter-element
effects,” X-ray Spectrom., vol. 4, pp. 138–148, 1975.
[51] H. Hieslmair, A. A. Istratov, R. Sachdeva, and E. R. Weber, “New synchrotron-
radiation based technique to study localized defects in silicon: ‘EBIC’ with X-ray
excitation,” in 10th Workshop on Crystalline Silicon Solar Cell Materials and Processes, 2000,
pp. 162–165.
[52] M. I. Bertoni, J. Maser, and V. Rose, “Grain engineering: How nanoscale
inhomogeneities can control charge collection in solar cells,” Nano Energy, vol. 32, no.
November 2016, pp. 488–493, 2017.
[53] M. Stuckelberger et al., “Latest developments in the x-ray based characterization
of thin-film solar cells,” 2015 IEEE 42nd Photovolt. Spec. Conf., pp. 1–6, 2015.
[54] B. Watts, D. Queen, A. L. D. Kilcoyne, T. Tyliszczak, F. Hellman, and H. Ade,
“Soft X-ray beam induced current technique,” J. Phys. Conf. Ser., vol. 186, no. 1, p.
012023, 2009.

88
[55] M. Stuckelberger et al., “Charge Collection in Hybrid Perovskite Solar Cells:
Relation to the Nanoscale Elemental Distribution,” IEEE J. Photovoltaics, vol. 7, no. 2,
pp. 590–597, 2017.
[56] M. Stuckelberger et al., “Engineering solar cells based on correlative X-ray
microscopy,” J. Mater. Res., vol. 32, no. 10, pp. 1825–1854, 2017.
[57] K. S. Shah, J. C. Lund, and F. Olschner, “Charge collection efficiency in a
semiconductor radiation detector with a non-constant electric field,” IEEE Trans. Nucl.
Sci., vol. 37, no. 2, pp. 183–186, 1990.
[58] T. Ramos, J. W. Andreasen, and J. S. Jørgensen, “AutoTomoAlign.” 2017.
[59] A. M. Maiden, M. J. Humphry, F. Zhang, and J. M. Rodenburg,
“Superresolution imaging via ptychography,” J. Opt. Soc. Am. A, vol. 28, no. 4, pp. 604–
612, 2011.
[60] E. Wolf, “New theory of partial coherence in the space–frequency domain Part
I: spectra and cross spectra of steady-state sources,” J. Opt. Soc. Am., vol. 72, no. 3, pp.
343–351, 1982.
[61] E. Wolf, “New theory of partial coherence in the space-frequency domain. Part
II: Steady-state fields and higher-order correlations,” J. Opt. Soc. Am. A, vol. 3, no. 1, pp.
76–85, 1985.
[62] L. W. Whitehead et al., “Diffractive imaging using partially coherent X rays,”
Phys. Rev. Lett., vol. 103, no. 24, pp. 1–4, 2009.
[63] B. Abbey et al., “Lensless imaging using broadband X-ray sources,” Nat.
Photonics, vol. 5, no. 7, pp. 420–424, 2011.
[64] P. Thibault and A. Menzel, “Reconstructing state mixtures from diffraction
measurements,” Nature, vol. 494, no. 7435, pp. 68–71, 2013.
[65] P. Li, D. J. Batey, T. B. Edo, A. D. Parsons, C. Rau, and J. M. Rodenburg,
“Multiple mode x-ray ptychography using a lens and a fixed diffuser optic,” J. Opt.
(United Kingdom), vol. 18, no. 5, pp. 1–8, 2016.
[66] M. R. Howells et al., “An assessment of the resolution limitation due to
radiation-damage in X-ray diffraction microscopy,” J. Electron Spectros. Relat.
Phenomena, vol. 170, no. 1–3, pp. 4–12, 2009.
[67] J. C. H. Spence, U. Weierstall, and M. Howells, “Coherence and sampling
requirements for diffractive imaging,” Ultramicroscopy, vol. 101, no. 2–4, pp. 149–152,
2004.
[68] H. A. Z. and C. L. W. Richard M. Goldstein, R. M. Goldstein, H. A. Zebker, and
C. L. Werner, “Satellite Radar Interferometry: Two-dimensional Phase Unwrapping,”
Radio Science, vol. 23, no. 4. pp. 713–720, 1988.

89
[69] V. V. Volkov and Y. Zhu, “Deterministic phase unwrapping in the presence of
noise.,” Opt. Lett., vol. 28, no. 22, pp. 2156–2158, 2003.
[70] A. Rose, “A unified approach to the performance of photographic film,
television pickup tubes, and the human eye,” J. Soc. Motion Pict. Eng., vol. 47, no. 4, pp.
273–294, 1946.
[71] R. Hegerl and W. Hoppe, “Influence of Electron Noise on Three-dimensional
Image Reconstruction,” Zeitschrift für Naturforsch. A, vol. 31, no. 12, 1976.
[72] B. F. McEwen, K. H. Downing, and R. M. Glaeser, “The relevance of dose-
fractionation in tomography of radiation-sensitive specimens,” Ultramicroscopy, vol. 60,
no. 3, pp. 357–373, 1995.
[73] W. Chao, B. D. Harteneck, J. A. Liddle, E. H. Anderson, and D. T. Attwood,
“Soft X-ray microscopy at a spatial resolution better than 15 nm,” Nature, vol. 435, no.
7046, pp. 1210–1213, 2005.
[74] J. Deng et al., “Opportunities and limitations for combined fly-scan
ptychography and fluorescence microscopy,” Proc. SPIE, vol. 9592, p. 95920U–1–
95920U–9, 2015.
[75] J. Deng et al., “Simultaneous cryo X-ray ptychographic and fluorescence
microscopy of green algae,” Proc. Natl. Acad. Sci. U. S. A., vol. 112, no. 8, pp. 2314–2319,
2015.
[76] J. N. Clark, X. Huang, R. J. Harder, and I. K. Robinson, “Continuous scanning
mode for ptychography,” Opt. Lett., vol. 39, no. 20, p. 6066, 2014.
[77] X. Huang et al., “Fly-scan ptychography,” Sci. Rep., vol. 5, p. 9074, 2015.
[78] P. M. Pelz, M. Guizar-Sicairos, P. Thibault, I. Johnson, M. Holler, and A.
Menzel, “On-the-fly scans for X-ray ptychography,” Appl. Phys. Lett., vol. 105, no. 25,
pp. 3–8, 2014.
[79] P. C. Hansen, J. G. Nagy, and D. P. O’Leary, Deblurring Images - matrices, spectra,
and filtering, 1st ed. Philadelphia: Society for Industrial and Applied Mathematics, 2006.
[80] P. C. Hansen, Discrete Inverse Problems, 1st ed. Philadelphia: Society for
Industrial and Applied Mathematics, 2010.
[81] M. R. Hestenes and E. Stiefel, “Methods of conjugate gradients for solving
linear systems,” J. Res. Nat. Bur. Stand., vol. 49, no. 6, pp. 409–436, 1952.
[82] L. Landweber, “An iteration formula for Fredholm integral equations of the
first kind,” Am. J. Math., vol. 73, no. 3, pp. 615–624, 1951.
[83] R. V. Mises and H. Pollaczek‐Geiringer, “Praktische Verfahren der
Gleichungsauflösung,” ZAMM ‐ J. Appl. Math. Mech. / Zeitschrift für Angew. Math. und

90
Mech., vol. 9, no. 2, pp. 152–164, 1929.
[84] G. Polak, E., Ribiere, “Note sur la convergence de méthodes de directions
conjuguées,” ESAIM Math. Model. Numer. Anal., vol. 3, pp. 35–43, 1969.
[85] M. Frigo and S. G. Johnson, “FFTW: An adaptive software architecture for the
FFT,” ICASSP, IEEE Int. Conf. Acoust. Speech Signal Process. - Proc., vol. 3, pp. 1381–1384,
1998.
[86] A. M. Cormack, “Representation of a function by its line integrals, with some
radiological applications. II,” J. Appl. Phys., vol. 35, no. 10, pp. 2908–2913, 1964.
[87] A. M. Cormack, “Reconstruction of densities from their projections, with
applications in radiological physics,” Phys. Med. Biol., vol. 18, no. 2, pp. 195–207, 1973.
[88] H. G. N., “Computerized transverse axial scanning(tomography):Part I
description of system,” Br. J. Radiol., vol. 46, no. 552, pp. 1016–1022, 1973.
[89] J. Radon, “Über die Bestimmung von Funktionen durch ihre Integralwerte
längs gewisser Mannigfaltigkeiten,” Berichte über die Verhandlungen der Königlich-
Sächsischen Akad. der Wissenschaften zu Leipzig, Math. Klasse, vol. 64, pp. 262–277, 1917.
[90] L. A. Feldkamp, L. C. Davis, and J. W. Kress, “Practical cone-beam algorithm,”
J. Opt. Soc. Am. A, vol. 1, no. 6, p. 612, 1984.
[91] J. W. Cooley and J. W. Tukey, “An Algorithm for the Machine Calculation of
Complex Fourier Series,” Math. Comput., vol. 19, no. 90, p. 297, 1965.
[92] R. A. Crowther, D. J. DeRosier, and A. Klug, “The Reconstruction of a Three-
Dimensional Structure from Projections and its Application to Electron Microscopy,”
Proc. R. Soc. A Math. Phys. Eng. Sci., vol. 317, no. 1530, pp. 319–340, 1970.
[93] T. M. Buzug, Computed tomography: From photon statistics to modern cone-beam CT.
2008.
[94] S. Kaczmarz, “Angenäherte Auflösung von Systemen linearer Gleichungen
(Approximate Solution for Systems of Linear Equations),” Bull. Int. l’Académie Pol. des
Sci. des Lettres. Cl. des Sci. Mathématiques Nat. Série A, Sci. Mathématiques, vol. 35, pp.
355–357, 1937.
[95] R. Gordon, R. Bender, and G. T. Herman, “Algebraic Reconstruction
Techniques ( ART ) for Three-dimensional Electron Microscopy and X-ray
Photography,” J. Theor. Biol., vol. 29, no. 3, pp. 471–476, 1970.
[96] A. C. Kak and M. Slaney, “Algebraic Reconstruction Algorithms,” in Principles
of Tomographic Imaging, New York, USA: IEEE Press, 1987, pp. 275–296.
[97] P. P. B. Eggermont, G. T. Herman, and A. Lent, “Iterative algorithms for large
partitioned linear systems, with applications to image reconstruction,” Linear Algebra

91
Appl., vol. 40, pp. 37–67, 1981.
[98] P. Gilbert, “Iterative methods for the three-dimensional reconstruction of an
object from projections,” J. Theor. Biol., vol. 36, no. 1, pp. 105–117, 1972.
[99] M. Guizar-Sicairos et al., “Phase tomography from x-ray coherent diffractive
imaging projections,” Opt. Express, vol. 19, no. 22, pp. 21345–21357, 2011.
[100] C. C. Wang, C. C. Chiang, B. Liang, G. C. Yin, Y. T. Weng, and L. C. Wang,
“Fast Projection Matching for X-ray Tomography,” Sci. Rep., vol. 7, no. 1, pp. 1–10,
2017.
[101] M. Guizar-Sicairos et al., “Phase tomography from x-ray coherent diffractive
imaging projections,” Opt. Express, vol. 19, no. 22, pp. 21345–21357, 2011.
[102] R. Guckenberger, “Determination of a common origin in the micrographs,”
Ultramicroscopy, vol. 9, pp. 167–174, 1982.
[103] D. J. Azevedo, Stephen G. Schneberk, J. P. Fitch, and H. E. Martz, “Calculation
of the rotational centers in computed tomography sinograms,” IEEE Trans. Nucl. Sci.,
vol. 31, no. 4, pp. 1525–1540, 1990.
[104] J. C. Fung, W. Liu, W. J. de Ruijter, H. Chen, and C. K. Abbey, “Toward fully
automated high-resolution electron tomography,” J. Struct. Biol., vol. 116, no. 1, pp.
181–189, 1996.
[105] T. Donath, F. Beckmann, and A. Schreyer, “Automated determination of the
center of rotation in tomography data.,” J. Opt. Soc. Am. A. Opt. Image Sci. Vis., vol. 23,
no. 5, pp. 1048–57, 2006.
[106] F. Bleichrodt and K. J. Batenburg, “Image Analysis: 18th Scandinavian
Conference, SCIA 2013, Espoo, Finland, June 17-20, 2013. Proceedings,” in Image
Analysis, J.-K. Kämäräinen and M. Koskela, Eds. Berlin, Heidelberg, 2013, pp. 489–500.
[107] D. S. Stephan, “High-Resolution 3D Ptychography,” no. September 2012, 2013.
[108] P. J. Dale, K. Hoenes, J. Scragg, and S. Siebentritt, “A review of the challenges
facing kesterite based thin film solar cells,” Conf. Rec. IEEE Photovolt. Spec. Conf., no.
June 2015, pp. 002080–002085, 2009.
[109] T. Buonassisi et al., “Applications of synchrotron radiation X-ray techniques on
the analysis of the behavior of transition metals in solar cells and single-crystalline
silicon with extended defects,” Phys. B Condens. Matter, vol. 340–342, pp. 1137–1141,
2003.
[110] A. Cazzaniga et al., “Ultra-thin Cu2ZnSnS4 solar cell by pulsed laser
deposition,” Sol. Energy Mater. Sol. Cells, vol. 166, no. January, pp. 91–99, 2017.
[111] M. Frumar, B. Frumarova, P. Nemec, T. Wagner, J. Jedelsky, and M. Hrdlicka,

92
“Thin chalcogenide films prepared by pulsed laser deposition - new amorphous
materials applicable in optoelectronics and chemical sensors,” J. Non. Cryst. Solids, vol.
352, no. 6–7, pp. 544–561, 2006.
[112] V. A. Solé, E. Papillon, M. Cotte, P. Walter, and J. Susini, “A multiplatform code
for the analysis of energy-dispersive X-ray fluorescence spectra,” Spectrochim. Acta -
Part B At. Spectrosc., vol. 62, no. 1, pp. 63–68, 2007.
[113] H. H. Bauschke, P. L. Combettes, and D. R. Luke, “Phase retrieval, error
reduction algorithm, and Fienup variants: a view from convex optimization,” J. Opt.
Soc. Am. A, vol. 19, no. 7, p. 1334, 2002.
[114] J. H. Hubbell, Bibliography and Current Status of K,L, and higher shells fluorescence
yields for computations of photon energy-absorption coefficients. National Bureau of
Standards, 1989.
[115] F. Salvat, J. Fernández-Varea, and J. Sempau, PENELOPE-2006: A code system for
Monte Carlo simulation of electron and photon transport, vol. 4, no. 6222. 2006.

93
Annexes

94

95

96

97

98

99

100

101

102

103

104

105

106

107

Direct 3D Tomographic Reconstruction and Phase-Retrieval of Far-Field Coherent Diffraction Patterns T. Ramos1, Bastian E. Grønager2, Martin Skovgaard Andersen3, J. W. Andreasen2,*
1Technical University of Denmark, Department of Energy Conversion and Storage, Roskilde, Denmark 2Technical University of Denmark, Department of Physics, Lyngby Denmark 3Technical University of Denmark, Department of Applied Mathematics and Computer Science, Lyngby, Denmark *Corresponding author: [email protected]
Abstract We present an alternative numerical reconstruction algorithm for direct tomographic reconstruction of a sample’s refractive indices from the measured intensities of its far-field coherent diffraction patterns. We formulate the well-known phase-retrieval problem in ptychography in a tomographic framework which allows for simultaneous reconstruction of the illumination function and the sample’s refractive indices in three dimensions. Our iterative reconstruction algorithm is based on the Levenberg-Marquardt algorithm and we demonstrate the performance of our proposed method with simulated and real datasets.
Introduction
The performance and behaviour of numerous engineering materials and biological systems in different scientific fields is largely determined by their internal structure down to the micro and nanoscale. The ability to image such nanoscale structures is considered to be a crucial tool for their study and understanding in order to promote their further development and research. X-ray microscopy is a non-invasive technique well suited for imaging such systems due to its minimal sample preparation requirements, high spatial resolution, high degree of penetration (compared with electron microscopy) possibility for quantitative measurements and in situ or operando experimental setups. Of the different X-ray microscopy variants, coherent diffraction imaging (CDI) techniques do not rely on X-ray imaging optics such as lenses and their spatial resolution is consequently not limited by lens aberrations or numerical apertures and has the potential to reach atomic length scales comparable to the illumination wavelength. Moreover, by relying on the diffractive properties of coherent radiation, CDI techniques are able to image samples with sizes smaller than the X-ray detector pixel itself and return quantitative information of the sample’s complex refractive index which is inaccessible by conventional X-ray transmission methods.
Forward scattering X-ray ptychography, first demonstrated in 2007 [1], is a scanning variant of CDI that aims to relax the requirements for finite sample sizes defined within a compact support, and plane incoming wave front, allowing for increased fields-of-view and the additional reconstruction of the illumination function. In a CDI experiment the incoming beam, described by the probe function, interacts with the sample and is attenuated and phase shifted before being propagated into an X-ray photon counting detector that measures its intensity. Without an imaging lens, any phase information of the wave-field is lost, giving rise to the so called missing-phase problem.
Ptychography or CDI phase retrieval algorithms replace the purpose of an image forming lens by recovering the unknown phase numerically, using iterative algorithms mostly based on some type of optimization scheme. A few exceptions to these methods exist with closed-form solutions [2], [3] but their high sampling requirements make their application practically infeasible.

3D ptychography or ptycho-tomography extends the unique capabilities of CDI techniques to a higher spatial dimension, relying on tomographic reconstruction algorithms to assemble three-dimensional volumes representing the sample’s refractive indices, from which the absorption properties and electron density may be deduced. Here, 3D ptychography is to be understood as described and should not be mistaken for the multi-slice reconstruction approach described in [4]. The combination of both CDI and tomographic methods is not direct, involving intermediate data analysis steps mostly concerning phase-unwrapping, background data normalization and tomographic alignment operations. Several methods to address these issues have already been presented in the literature [5]–[9] and have so far been successfully applied in different fields of applications.
As X-ray ptycho-tomography expands into new scientific areas and in situ and operando studies, the need for faster acquisition times is becoming a decisive factor for the success of an experiment. Besides, new generation synchrotrons will deliver higher fluxes with a superior degree of coherence, and thus the spatial resolution of CDI techniques will most likely be limited by radiation damage suffered by the sample, rather than the coherence properties of the beam. According to the dose fractionation theorem, introduced by Hegerl and Hoppe [10], [11], the dose required to achieve a given statistical significance for each voxel of the three-dimensional tomogram is the same as required to measure a single projection of the same voxel with the same statistical significance. So far, ptychographic reconstruction algorithms rely on a significant overlap between illuminations in different scanning coordinates in order to constrain the domain of possible solutions and accurately recover the phase contrast image. A direct combination of ptychographic reconstruction methods with tomographic algorithms is thought to be able to relax this illumination overlap requirement by reducing its domain to a single 3D volume instead of a series of 2D projections (see Figure 1). Additionally, 2D ptychography images may contain non-negligible reconstruction errors that result in artefacts or resolution deterioration during tomographic reconstruction [12], [13]. Such uncertainties are expected to diminish in a direct ptycho-tomography reconstruction algorithm, because all measured data is implicitly forced to be consistent within a single three-dimensional volume.
Figure 1: Schematic representation of the overlap between consecutive illuminations in a 2D (left) and 3D (right) ptychography setup. In 2D ptychography, the illumination overlap (represented by the hatched area) is enforced at each tomographic angle by taking scanning step sizes smaller than the probe function width. In a three-dimensional setup, the overlap constraint is applied on illuminations from adjacent projection angles that overlap in the 3D volume that defines the tomographic reconstruction field-of-view.

Recently, Gürsoy [14] has shown that the probe overlap constraint can be significantly relaxed if a combined ptycho-tomography reconstruction approach is applied. In his work, Gürsoy extended the error-reduction algorithm of Fienup [15], [16] to a tomographic setting by intercalating this iterative method with one iteration of the SIRT algorithm [17] for tomographic reconstruction implemented with an additional total-variation (TV) regularization in order to preserve the edges of the object. Besides his proof-of-concept and encouraging results, the method proposed by Gürsoy implicitly relies on the combination of two different optimization strategies with different cost-functions (the error-reduction and the SIRT algorithm). We suggest that improved reconstruction results may be possible if this problem is expressed as a single optimization problem instead of two separate ones with different cost functions. Other independent and relevant works combining phase-retrieval and tomographic reconstruction were developed by Maretzke [18], [19] and by Kostenko [20] applied to full-field imaging methods such as in-line near-field holography with encouraging results demonstrated for real datasets.
In our work, we present a general description of a ptychography experiment and a direct ptycho-tomography reconstruction algorithm based on a single optimization cost-function with the potential to deal with datasets exhibiting moderate phase-wrapping. Our reconstruction strategy is based on a non-linear optimization algorithm that we show is able to accurately recover three-dimensional reconstructions of both the real and imaginary part of the sample’s complex refractive index, simultaneously.
This document is structured as follows: First, we describe the general forward model for a ptychography experiment. Afterwards, we present our reconstruction technique as a regularized optimization algorithm that solves a quadratic approximation of the Poisson log-likelihood function between the measured intensities and those resulting from our forward model. The behaviour of the proposed algorithm is demonstrated for simulated and real datasets.
At this stage, the proposed reconstruction method relies on a good estimation of the relative alignment parameters between the sample and the detector at each scanning coordinate. In the presence of misalignments, if a reasonable tomographic reconstruction guess is available from the proposed reconstruction method, additional alignment refinement algorithms such as those in [5], [7], [9], [21], [22] could be applied.
Methods
In a far-field coherent diffraction imaging measurement, the recorded intensity 𝐼𝚯 of the diffracted X-ray wavefront at the detector plane can be modelled, in the absence of noise, according to the Fraunhofer approximation:
𝐼𝚯 ≅ |ℱ{𝜓𝚯}|2 = |Ψ𝚯|2. (1)
Here, 𝚯 generalizes a set of relative orientation parameters between the incoming wavefront and the sample. These include spatial translations between the illumination and the sample, tomographic rotation angles and other possible angular tilts that may occur during data acquisition. For a monochromatic coherent illumination, the free-space propagation of the exit-wave 𝜓𝚯, after beam-sample interaction, can be modelled by a simple two-dimensional Fourier transform ℱ. Please note that this approximation is only valid for far-field measurements whereas in the near-field a Fresnel propagator should be used instead.
In our work, we assume that the incoming illumination wavefront, described by a complex-valued probe function, is constant during data acquisition and thus, also for notation simplicity, it will be represented by a unique symbol, 𝑃. In practice this assumption is not always entirely true and it has been shown that ptychography reconstructions can be improved by refinement algorithms [23] that take local probe variations into consideration. Under the ‘thin sample’ condition [24], the interaction between the incoming wavefront and the sample can be approximated by a simple multiplicative relation so that
𝜓𝚯 = 𝑃𝑂𝚯, (2)

where 𝑂 is the so-called object function and is related to the complex transmissivity of the sample up to a constant phase term. Other first-order phase terms may appear during ptychography reconstructions but are associated with uncertainties in the exact position of the centre of the diffraction patterns [8], [24]. Most of the already existing ptychography algorithms aim to recover both the probe 𝑃 and the object function 𝑂𝚯 in an alternating optimization approach, by iteratively refining the initial guesses of these functions using different, but analogous, strategies [24]–[28]. In turn, 𝑂 can also be defined as a function of the sample’s complex refractive index 𝑛 as
𝑂(𝑥, 𝑦) = exp [2𝜋𝐢
𝜆∫(𝑛(𝑥, 𝑦, 𝑧) − 1)d𝑧] , (3)
where 𝜆 represents the wavelength of the incoming X-ray beam, 𝐢 is the imaginary unit, 𝑥, 𝑦 and 𝑧 represent the spatial coordinates of the object expressed in a fixed coordinate system where 𝑧 is the direction of the incoming (and propagated) parallel X-ray beam, assumed to be perpendicular to the detector plane. For a given refractive index, 𝑛 = 1 − 𝛿 + 𝐢𝛽, the local electron density of the sample 𝜌𝑒 and linear absorption coefficient 𝜇 may be deduced according to
𝜌𝑒(𝑥, 𝑦, 𝑧) =2𝜋𝛿(𝑥,𝑦,𝑧)
𝑟0𝜆2 , (4)
𝜇(𝑥, 𝑦, 𝑧) =4𝜋𝛽(𝑥,𝑦,𝑧)
𝜆, (5)
where 𝑟0 = 2.82 ∙ 10−5 Å is the Thomson scattering length or classical electron radius.
Forward model
The description of our forward model follows naturally from the combination of (1), (2) and (3)
𝐼𝚯𝑓
= 𝐹(𝑛′) = |ℱ{𝑃 ∙ exp[𝐢𝑘ℛ𝚯(𝑛′)]}|2, (6)
where the wave number is defined as 𝑘 =2𝜋
𝜆 and ℛ𝚯 represents a linear operator that computes the line
integral in equation (3) expressed in terms of the relative sample-beam orientation parameters 𝚯. For notation simplicity we introduced 𝑛′ = 𝑛 − 1 = −𝛿 + 𝐢𝛽, that is the argument of our forward model and that we aim to resolve by our proposed method.
Reconstruction algorithm
As the phase information of the wavefront is lost in data acquisition, the inverse of our forward model 𝐹−1 cannot be defined uniquely. Also, the presence of noise in the measurements and small differences between the numerical model in equation (6) and the real physical phenomenon, make this inverse problem ill-posed.
The fundamental idea behind our reconstruction algorithm is analogous to those in traditional ptychography methods, meaning that it searches iteratively for a complex solution ��′, for the refractive indices of the sample, that minimize the differences between the experimentally measured intensities 𝐼𝚯
𝑚
and those resulting from the forward model in equation (6) 𝐼𝚯𝑓
. We choose as our object function the
quadratic approximation of the log-likelihood function [29] for the family of normal distributions 𝑁(𝜇𝑁 , 𝜎𝑁
2) with unknown mean 𝜇𝑁 and variance 𝜎𝑁2 defined as
𝑙(𝜇𝑁 , 𝜎𝑁2, 𝑥) = −
1
2𝜎𝑁2
∑ (𝑥𝑖 − 𝜇𝑁)2𝑖 , (7)
where 𝑥𝑖 denotes the intensity measurement/observation at the 𝑖 -th pixel. In an X-ray diffraction experiment, the measured intensities follow Poisson statistics, meaning that noise is uncorrelated between pixels and its variance for each pixel can be approximated by the mean measured intensity. Maximizing equation (7) is mathematically equivalent to minimizing the quadratic approximation of the negative log-likelihood, which in turn is expressed as the least-squares problem:

min𝑛′
𝑓(𝑛′) =1
2∑ (
𝐼𝚯𝑖
𝑓(𝑛′)−𝐼𝚯𝑖
𝑚
𝜎𝑖)
2
𝑖 . (8)
In our implementation the standard deviation in equation (8) is approximated by 𝜎 ≈ √𝐼𝚯𝑚 + 𝜖 in order to
decouple any dependence between the noise model and our forward model in (6). Also, the constant 𝜖 = 1 is used in order to avoid divisions by zero that may introduce numerical errors during reconstruction that are associated with pixels with zero measured intensities. Besides the ill-posed nature of this problem, the forward model (6) is also non-linear because of the squared modulus operator and the exponential function. This suggests that candidate solvers for equation (8) belong to the family of non-linear regularized least-squares minimization algorithms as is the case for the (non-linear, regularized) Gauss-Newton [30], Levenberg-Marquardt [31], [32] and Powell’s Dog Leg method, among others. In our work, the problem in equation (8) is solved with the Levenberg-Marquardt algorithm (LMA), also known as damped Gauss-
Newton method. Let us define a vector-valued function 𝑟(𝑛′) =𝐼𝚯
𝑒(𝑛′)−𝐼𝚯𝑚
√𝐼𝚯𝑚+𝜖
, also known as residual vector, so
that
1
2∑ (
𝐼𝚯𝑖
𝑓(𝑛′)−𝐼𝚯𝑖
𝑚
√𝐼𝚯𝑚+𝜖
)
2
𝑖 =1
2𝑟(𝑛′)∗𝑟(𝑛′). (9)
Here the superscript ‘∗’ represents the adjoint or conjugate transpose operator. The gradient and Hessian of the cost function 𝑓(𝑛′) are expressed as
∇𝑓(𝑛′) = 𝐽(𝑛′)∗𝑟(𝑛′), (10)
∇2𝑓(𝑛′) = 𝐽(𝑛′)∗𝐽(𝑛′) + 𝑄(𝑛′), (11)
where 𝐽(𝑛′) =𝜕𝑟
𝜕𝑛′ =1
√𝐼𝚯𝑚+𝜖
𝜕𝐼𝚯𝑓
(𝑛′)
𝜕𝑛′ is the Jacobian of 𝑟(𝑛′), and 𝑄(𝑛′) denotes higher order quadratic terms
of the Hessian that are often ignored for many large scale problems to improve computational efficiency. The cost function 𝑓(𝑛′) can be linearized around a current estimate of a minimizing point by means of a second-order Taylor expansion expressed as a function of the Jacobian and Hessian as
𝑓(𝑛′ + ∆𝑛′) ≈ 𝑓(𝑛′) + ∇𝑓(𝑛′)∆𝑛′ +1
2∆𝑛′∗
∇2𝑓(𝑛′)∆𝑛′. (12)
As most numerical minimization algorithms, the LMA adjusts an initial guess for 𝑛′ by taking an update step ℎ𝑛′ = ∆𝑛′ that minimizes the quadratic cost-function. This is done by differentiating (12) and computing its roots. This way, at the 𝑙-th iteration, we define:
ℎ𝑛′[𝑙]
= −(∇2𝑓(𝑛′[𝑙]) + 𝜆𝑙𝑚)−1
∇𝑓(𝑛′[𝑙]), (13)
𝑛′[𝑙+1] = 𝑛′[𝑙] + ℎ𝑛′[𝑙]
. (14)
In equation (13), 𝜆𝑙𝑚 is a damping factor, introduced by Levenberg [31] that regularizes the Hessian and is updated at each iteration. Considering the aforementioned first-order approximation of the Hessian, both ∇𝑓(𝑛′) and ∇2𝑓(𝑛′) require the definition of 𝐽(𝑛′) and its adjoint 𝐽(𝑛′)∗. As in the work by Maretzke [18],
[19] we express these functions implicitly, depending on the current reconstruction 𝑛′[𝑙]:
𝐽 (𝑛′[𝑙]) ℎ
𝑛′[𝑙]
=1
√𝐼𝚯𝑚+𝜖
ℜ [(ℱ{𝑃 ∙ exp[𝐢𝑘ℛ𝚯(𝑛′[𝑙])]})
ℱ {𝐢𝑘𝑃 ∙ exp [𝐢𝑘ℛ𝚯 (𝑛′[𝑙]
)] ℛ𝚯 (ℎ𝑛′[𝑙]
)}] =
1
√𝐼𝚯𝑚+𝜖
ℜ [(Ψ𝚯[𝑙]) ℱ {(𝐢𝑘𝜓𝚯
[𝑙])ℛ𝚯 (ℎ𝑛′[𝑙]
)}], (15)

𝐽 (𝑛′[𝑙])
∗ℎ𝑔
[𝑙]= ℛ𝚯
∗ [𝐢𝑘𝑃 ∙ exp[𝐢𝑘ℛ𝚯(𝑛′[𝑙])] ℱ−1 {
1
√𝐼𝚯𝑚+𝜖
(ℱ {𝑃 ∙ exp [𝐢𝑘ℛ𝚯 (𝑛′[𝑙])]}) ℜ [ℎ𝑔
[𝑙]]}] =
2ℛ𝚯∗ [(𝐢𝑘𝜓𝚯
[𝑙]) ℱ−1 {
Ψ𝚯[𝑙]ℜ[ℎ𝑔
[𝑙]]
√𝐼𝚯𝑚+𝜖
}]. (16)
In equations (15) and (16) the overbar denotes complex conjugation, ℜ is the real-part (self-adjoint) operator and ℛ𝚯
∗ generalizes the tomographic back-transform according to the fields-of-view and sampleorientation parameters described by 𝚯.
Probe Retrieval
In most CDI experiments, the probe function 𝑷 may not be known or available, but it can be retrieved by ptychography algorithms in an alternating optimization approach. In our work we follow the same method for reconstructing 𝒏′ in order to recover 𝑷, intercalating both optimization problems after each iteration of the proposed algorithm. The probe reconstruction problem is then formulated as
�� = argmin𝑃
1
2∑ (
𝐼𝚯𝑖
𝑓(𝑃)−𝐼𝚯𝑖
𝑚
𝜎𝑖)
2
𝑖 . (17)
Here, the Jacobian and Hessian approximations are expressed as functions of 𝐽𝑝(𝑃) and 𝐽𝑝(𝑃)∗, that in turn
are given by
𝐽𝑃(𝑃[𝑙])ℎ𝑃[𝑙]
=1
√𝐼𝚯𝑚+𝜖
ℜ [(Ψ𝚯[𝑙]) ℱ {𝑂𝚯
[𝑙]ℎ𝑃}], (18)
𝐽𝑃(𝑃[𝑙])∗ℎ𝑔
[𝑙]= 2𝑂𝚯
[𝑙] ℱ−1 {
Ψ𝚯[𝑙]ℜ[ℎ𝑔
[𝑙]]
√𝐼𝚯𝑚+𝜖
}. (19)
Discretization and Implementation
The linear operator ℛ𝚯 and its adjoint were implemented using the ASTRA toolbox [33] in order to exploit GPU resources for faster computations on large datasets. Besides, a full description of the relative positioning between incoming beam, sample and detector is allowed, enabling the reconstruction of datasets acquired with more complex scanning geometries. This flexible operator can also be used to correct for any known translational or angular motion that the sample may experience during measurements i.e. vibrations or wobbling of the rotation axis. The 2D Fourier transform ℱ and its adjoint/inverse were implemented using the FFTW library [34] and all multiplications in equations (6), (14) and (15) are to be understood element-wise. The developed algorithms were implemented and tested using MATLAB®2017a and Python2 on both Windows and Linux platforms and are publically available online under the DOI: 10.6084/m9.figshare.6608726.
Each iteration of the LMA, computes the solution update step in equation (13) by solving the least-squares problem:
(𝐽∗[𝑙]𝐽[𝑙] + 𝜆𝑙𝑚𝐈)ℎ𝑛′[𝑙]
= −𝐽∗[𝑙]𝑟[𝑙], (20)
using the Hestenes-Stiefel version of the conjugate gradient method (CGM)[35], [36]. In equation (20), 𝐈 is the identity matrix. In turn, the damping term of the LMA, 𝜆𝑙𝑚 is updated at each iteration using the strategy in [37].
The application of constraints in 𝑛′, after each solution update, is seen to be essential for accurate quantitative reconstruction of the refractive indices of the sample. These become particularly important in order to resolve datasets with wrapped phases in the object function (3). In our implementation, a non-

negativity constraint is applied to 𝑛′, after each iteration, limiting the domain of 𝛿 and 𝛽 to only non-negative numbers. Once a new solution for 𝑛′ is computed we write
𝑛′[𝑙]= −𝛿[𝑙] + 𝐢𝛽[𝑙] = min(−𝛿[𝑙], 0) + 𝐢 max(𝛽[𝑙], 0). (21)
The resulting reconstruction algorithm is summarized in the pseudocode Algorithm 1:
Algorithm 1: Tomographic Reconstruction of Far-Field Coherent Diffraction Patterns
1. Initialize 𝑛′, 𝜆𝑙𝑚
2. While 𝑙 < 𝑙𝑚𝑎𝑥 or not stop-criterion do:
Use forward model to compute
𝐹[𝑙] = 𝐹(𝑛′[𝑙])
Solve (12) using CGM (Hestenes-Stiefel):
(𝐽∗[𝑙]𝐽[𝑙] + 𝜆𝑙𝑚𝐈)ℎ𝑛′[𝑙]
= −𝐽∗[𝑙]𝐹[𝑙]
Update sample solution
𝑛′[𝑙+1] = 𝑛′[𝑙] + ℎ𝑛′[𝑙]
Enforce constraints to sample solution
Update 𝜆𝑙𝑚
Solve using CGM (Hestenes-Stiefel):
(𝐽𝑃∗[𝑙]
𝐽𝑃[𝑙] + 𝜆𝑙𝑚,𝑃𝐈) ℎ𝑃
[𝑙]= −𝐽𝑃
∗[𝑙]𝐹[𝑙]
Update probe solution
𝑃[𝑙+1] = 𝑃[𝑙] + ℎ𝑃[𝑙]
Enforce constraints to Probe solution
Update 𝜆𝑙𝑚,𝑃
End While
Simulation setup
A 3003-voxel discretized complex-valued phantom was used to generate 4000 diffraction patterns randomly distributed over 180 degrees around the rotation axis of the sample. These were computed using the forward model in equation (6) and afterwards rounded to integer numbers. Four different simulations were conducted in order to evaluate the robustness of our algorithm in the presence of noise and weakly-absorbing samples. In this context, weakly-absorbing samples are understood as those with 𝛽 ≪ 𝛿. The
simulated 𝛿 and 𝛽 values are in the range of 0 to 10−5 for two of the simulations, whereas for the weakly-absorbing samples the 𝛽 ranges from 0 to 10−7. The detector with 1002 pixels of 172 µm was placed at 5 m from the sample, which for a wavelength of 1 Å corresponds to a reconstructed voxel size of 29 nm. The probe function was generated using a Gaussian function, with a total integrated intensity of 107 photons and is illustrated in Figure 2. The generated 𝛿 and 𝛽 volumes are depicted in Figure 3 for the weakly-absorbing sample case. In this work the real and imaginary part of the simulated phantom were generated
Figure 2: Amplitude and phase of the complex-valued probe function used in our simulations.

independently with different structures. This was done in order to demonstrate a good reconstruction performance for cases where no explicit dependence between 𝛿 and 𝛽 may be expressed.
When imaging samples with high 𝛿 and/or large thicknesses, phase shifts of the object function (equation (3)) may be larger than 𝜋 resulting in wrapping of the phase. Current reconstruction strategies rely either on phase-unwrapping algorithms [38]–[40] of the phase-contrast projections prior to tomographic reconstruction, or alternative tomographic reconstruction algorithms such as those in [8], [9]. In order to
evaluate the robustness of our reconstruction method in the presence of phase-wrapping a simulated
sample with 𝛿 values in the range of [0 ~ 5 × 10−5] was used resulting in phase-wrapping of the object function as shown in Figure 5b.
All tomographic reconstructions presented in this document were obtained using 25 iterations of the CGM and 50 iterations of the LMA, except for the datasets with phase-wrapping where 100 iterations of the LMA were used instead.
Results and Discussion
The final reconstructions of simulated data, using our proposed reconstruction algorithm, are presented in Figure 4. Our results suggest that Poisson noise in the measurements decreases the reconstruction quality as is intuitively expected, and is responsible for artefacts during the initial reconstruction iterations. Such artefacts arise from erroneous contributions of the real part of the solution update ℎ𝑁 into its imaginary part or vice versa. We also found that reconstructing 𝛽 for weakly-absorbing samples is increasingly challenging as the results in Figure 4 illustrate. We believe that this effect can be explained by the difference in orders of magnitude between the 𝛿 and 𝛽 values of the sample. When such difference is large our reconstruction method is mostly dominated by updates of the 𝛿 volume that have a higher impact on
Figure 3: Complex-valued phantom used in our simulations. On the top: 3D isosurface and cross-section over cardinal planes for simulated 𝜹 object. On the bottom: Same for simulated 𝜷 volume.

the cost-function in equation (8). On the other hand, when the 𝛽 and 𝛿 are in the same order of magnitude, the reconstructed tomograms are in good agreement with both the real and imaginary parts of the sample’s refractive indices.
The full proof of convergence of our proposed method in the presence of large phase-shifts (> 𝜋) is not part of the scope of this publication. Nonetheless, our simulations indicate that by the use of appropriate constraints, such as the one in equation (21) and at the cost of additional iterations, accurate tomographic reconstructions can be achieved by the reconstruction algorithm as exhibited in Figure 5.
An example of application of the proposed algorithm to a real dataset is presented in Figure 6. The diffraction data was acquired at the cSAXS beamline from the Paul Scherrer Institut from a LiFePO4 powder sample inside a glass capillary tube. A total of 200 ptychography projection images were reconstructed by the difference map algorithm with maximum-likelihood probe positioning refinement [23], [27], [41] from 172 different scanning positions each. As our proposed reconstruction algorithm requires handling all
Figure 4: X-Y tomographic slices of the reconstructed refractive index for simulation data. The reconstructed 𝜹 volumes are represented at the top and the 𝜷 on the bottom. From left to right: low-absorption noise-free; low-absorption Poisson noise; high-absorption noise-free; high-absorption Poisson noise. The intensity scale in each image was properly normalized according
to the refractive index of the sample i.e. [𝟎~𝟏𝟎−𝟓] for all images except for the 𝜷 representations with low-absorption where
[𝟎~𝟏𝟎−𝟕] was used instead.
Figure 5: Comparison between tomographic reconstructions, by the proposed algorithm, from datasets with and without phase-wrapping of the object function. (a) and (b) illustrate the phase-shifts of the object function without and with phase-phase-wrapping respectively. (c) and (d) show X-Y slices from tomographic reconstructions exhibiting an accurate reconstruction of 𝜹 for the dataset containing wrapped phases (or large phase-shifts).

diffraction patterns at once, we saw ourselves limited by its high memory demands both in terms of RAM and GPU onboard memory. For this reason, we show the behaviour of our reconstruction method by using only a small fraction of the total acquired dataset. For the reconstruction in Figure 6c the diffraction patterns were cropped to their central 300 × 300 pixels and in Figure 6d to their central 400 × 400 pixels. Please note that this operation results in an increase of the reconstructed voxel size from 14.3 nm to 28.6 nm and 21.5 nm for Figure 6c and Figure 6d respectively, and consequently to a decrease in spatial resolution. Furthermore, the reconstruction in Figure 6d was obtained by using only 1/4th of the total diffraction patterns. Due to computational limitations, our reconstruction algorithm was run with only 20 iterations for both CGM and LMA algorithms, which in this case were sufficient to illustrate the main features of the sample inner structure. Improvements in reconstruction accuracy and resolution could be achieved, for example, by increasing the number of iterations taken in both CGM and LMA, and the amount or size of the diffraction data used. We expect that it will soon be possible to handle full data sets with the advent of memory architectures linked across several GPU’s.
(a)
(c)
(b)
(d)
Figure 6: Tomographic reconstructions of 𝜹 values obtained by different reconstruction approaches: (a) Filtered backprojection of 200 uniformly distributed projections. (b) Tomographic reconstruction with 1/4th of the dataset (50 projections). Because of the reduced number of projections the reconstruction was obtained by the SIRT algorithm with 200 iterations. (c) Tomographic reconstruction by the proposed algorithm with 20 iterations of the CGM and 15 iterations of the LMA algorithm. (d) Tomographic reconstruction by the proposed algorithm with 20 iterations of the CGM and 20 iterations of the LMA algorithm with 1/4th of the total diffraction patterns dataset. Reconstructed voxel sizes of 14.3 nm for for (a) and (b), 28.6 nm for (c) and 21.5 nm for (d). The greyscale varies linearly with the 𝜹 values from 0 (white) to 𝟏 ×
𝟏𝟎−𝟓 (black).

Conclusions and future work
In this work we have presented a numerical algorithm for direct tomographic reconstruction of the volumetric distribution of the refractive index of a sample from intensity measurements of far-field coherent diffraction patterns. This non-linear and ill-posed inverse problem is framed as a least-squares optimization problem, taking into account Poisson noise statistics in the measured intensities, which we solve by the Levenberg-Marquardt algorithm. Our simulation results show that accurate reconstruction of the sample’s refractive indices can be retrieved by the proposed method, which is of special interest for phase-contrast tomography experiments. Our studies also indicate that the convergence of this proposed reconstruction method is mostly dominated by the highest values of 𝑛′, making the reconstruction of the absorption properties of the sample increasingly challenging for the cases where 𝛽 ≪ 𝛿.
Future improvements to our proposed algorithm will include the implementation of other regularization methods, such as Tikhonov (for noise suppression) and total variation (for edge-enhancement) in our optimization problem. Additional constraints in both direct and/or reciprocal space may also benefit the convergence of the proposed reconstruction method by restricting/bounding the solution space of our problem. We are currently working on a multiscale reconstruction approach to decrease the total computational time by first reconstructing a low-resolution version of the object that is then taken as initial solution guess for the high-resolution reconstruction.
So far, all the presented tomographic reconstructions relied on the exact knowledge of the probe function and the sample spatial coordinates at each scanning position. The extension of the proposed method for probe retrieval is an ongoing endeavour.

References [1] J. M. Rodenburg, A. C. Hurst, A. G. Cullis, B. R. Dobson, F. Pfeiffer, O. Bunk, C. David, K. Jefimovs, and
I. Johnson, “Hard-X-ray lensless imaging of extended objects,” Phys. Rev. Lett., vol. 98, no. 3, pp. 1–4, 2007.
[2] J. M. Rodenburg and R. H. T. Bates, “The Theory of Super-Resolution Electron Microscopy Via Wigner-Distribution Deconvolution,” Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, vol. 339, no. 1655. pp. 521–553, 1992.
[3] H. N. Chapman, “Phase-retrieval X-ray microscopy by Wigner-distribution deconvolution,” Ultramicroscopy, vol. 66, no. 3–4, pp. 153–172, 1996.
[4] A. M. Maiden, M. J. Humphry, and J. M. Rodenburg, “Ptychographic transmission microscopy in three dimensions using a multi-slice approach,” J. Opt. Soc. Am. A, vol. 29, no. 8, p. 1606, 2012.
[5] P. Fomby and A. J. Cherlin, “Automatic alignment and reconstruction of images for soft X-ray tomography,” J. Struct. Biol., vol. 72, no. 2, pp. 181–204, 2011.
[6] S. Brandt, J. Heikkonen, and P. Engelhardt, “Automatic alignment of transmission electron microscope tilt series without fiducial markers.,” J. Struct. Biol., vol. 136, no. 3, pp. 201–213, 2001.
[7] F. Bleichrodt and K. J. Batenburg, “Automatic optimization of alignment parameters for tomography datasets,” in Image Analysis: 18th Scandinavian Conference, SCIA 2013, Espoo, Finland, June 17-20, 2013. Proceedings, Berlin, Heidelberg: Springer Berlin Heidelberg, 2013, pp. 489–500.
[8] M. Guizar-Sicairos, A. Diaz, M. Holler, M. S. Lucas, A. Menzel, R. a. Wepf, and O. Bunk, “Phase tomography from x-ray coherent diffractive imaging projections,” Opt. Express, vol. 19, no. 22, pp. 21345–21357, 2011.
[9] T. Ramos, J. S. Jørgensen, and J. W. Andreasen, “Automated angular and translational tomographic alignment and application to phase-contrast imaging,” J. Opt. Soc. Am. A, vol. 34, no. 10, pp. 1830–1843, 2017.
[10] R. Hegerl and W. Hoppe, “Influence of Electron Noise on Three-dimensional Image Reconstruction,” Zeitschrift für Naturforsch. A, vol. 31, no. 12, 1976.
[11] B. F. McEwen, K. H. Downing, and R. M. Glaeser, “The relevance of dose-fractionation in tomography of radiation-sensitive specimens,” Ultramicroscopy, vol. 60, no. 3, pp. 357–373, 1995.
[12] M. Odstrčil, A. Menzel, and M. Guizar-Sicairos, “Iterative least-squares solver for generalized maximum-likelihood ptychography,” Opt. Express, vol. 26, no. 3, p. 3108, 2018.
[13] M. Holler, A. Diaz, M. Guizar-Sicairos, P. Karvinen, E. Färm, E. Härkönen, M. Ritala, A. Menzel, J. Raabe, and O. Bunk, “X-ray ptychographic computed tomography at 16 nm isotropic 3D resolution,” Sci. Rep., vol. 4, p. 3857, 2014.
[14] D. Gürsoy, “Direct coupling of tomography and ptychography,” Opt. Lett., vol. 42, no. 16, pp. 3169–3172, 2017.
[15] J. R. Fienup, “Reconstruction of a complex-valued object from the modulus of its Fourier transform using a support constraint,” J. Opt. Soc. Am. A, vol. 4, no. 1, p. 118, 1987.

[16] J. R. Fienup, “Reconstruction of an object from the modulus of its Fourier transform,” Opt. Lett., vol. 3, no. 1, p. 27, 1978.
[17] P. Gilbert, “Iterative methods for the three-dimensional reconstruction of an object from projections,” J. Theor. Biol., vol. 36, no. 1, pp. 105–117, 1972.
[18] S. Maretzke, “Regularized Newton methods for simultaneous Radon inversion and phase retrieval in phase contrast tomography,” Georg-August-Universtität, 2015.
[19] S. Maretzke, M. Bartels, M. Krenkel, T. Salditt, and T. Hohage, “Regularized Newton Methods for X-ray Phase Contrast and General Imaging Problems,” Opt. Express, vol. 24, no. 6, pp. 6490–6506, 2016.
[20] A. Kostenko, K. J. Batenburg, A. King, S. E. Offerman, and L. J. van Vliet, “Total variation minimization approach in in-line x-ray phase-contrast tomography,” Opt. Express, vol. 21, no. 10, pp. 12185–12196, 2013.
[21] L. Houben and M. Bar Sadan, “Refinement procedure for the image alignment in high-resolution electron tomography,” Ultramicroscopy, vol. 111, no. 9–10, pp. 1512–1520, 2011.
[22] C. Yang, E. G. Ng, and P. A. Penczek, “Unified 3-D structure and projection orientation refinement using quasi-Newton algorithm,” J. Struct. Biol., vol. 149, no. 1, pp. 53–64, 2005.
[23] P. Thibault and M. Guizar-Sicairos, “Maximum-likelihood refinement for coherent diffractive imaging,” New J. Phys., vol. 14, 2012.
[24] J. M. Rodenburg, “Ptychography and related diffractive imaging methods,” Adv. Imaging Electron Phys., vol. 150, no. 07, pp. 87–184, 2008.
[25] M. Guizar-Sicairos and J. R. Fienup, “Phase retrieval with transverse translation diversity: a nonlinear optimization approach,” Opt. Express, vol. 16, no. 10, pp. 7264–7278, 2008.
[26] R. Hesse, D. R. Luke, S. Sabach, and M. K. Tam, “Proximal Heterogeneous Block Input-Output Method and application to Blind Ptychographic Diffraction Imaging,” vol. 8, no. 1, pp. 426–457, 2014.
[27] P. Thibault, M. Dierolf, O. Bunk, A. Menzel, and F. Pfeiffer, “Probe retrieval in ptychographic coherent diffractive imaging,” Ultramicroscopy, vol. 109, no. 4, pp. 338–343, 2009.
[28] H. H. Bauschke, P. L. Combettes, and D. R. Luke, “Phase retrieval, error reduction algorithm, and Fienup variants: a view from convex optimization,” J. Opt. Soc. Am. A, vol. 19, no. 7, p. 1334, 2002.
[29] L. Held and D. Sabanés Bové, Applied statistical inference: Likelihood and bayes, vol. 9783642378. Springer-Verlag Berlin Heidelberg, 2014.
[30] J. Nocedal and S. J. Wright, Numerical Optimization, vol. 43, no. 2. 1999.
[31] K. Levenberg, “A method for the solution of certain non-linear problems in least squares,” SIAM J. Sci. Comput., vol. 11, no. 2, pp. 431–441, 1944.
[32] D. W. Marquardt, “An algorithm for least-squares estimation of nonlinear parameters,” Journal of the Society for Industrial and Applied Mathematics, vol. 11, no. 2. pp. 431–441, 1963.
[33] W. van Aarle, W. J. Palenstijn, J. De Beenhouwer, T. Altantzis, S. Bals, K. J. Batenburg, and J. Sijbers,

“The ASTRA Toolbox: A platform for advanced algorithm development in electron tomography.,” Ultramicroscopy, vol. 157, pp. 35–47, 2015.
[34] M. Frigo and S. G. Johnson, “FFTW: An adaptive software architecture for the FFT,” ICASSP, IEEE Int. Conf. Acoust. Speech Signal Process. - Proc., vol. 3, pp. 1381–1384, 1998.
[35] G. Polak, E., Ribiere, “Note sur la convergence de méthodes de directions conjuguées,” ESAIM Math. Model. Numer. Anal., vol. 3, pp. 35–43, 1969.
[36] M. R. Hestenes and E. Stiefel, “Methods of conjugate gradients for solving linear systems,” J. Res. Nat. Bur. Stand., vol. 49, no. 6, pp. 409–436, 1952.
[37] P. C. Hansen, V. Pereyra, and G. Scherer, Least squares data fitting with applications. Baltimore: The Johns Hopkins University Press, 2012.
[38] H. A. Z. and C. L. W. Richard M. Goldstein, R. M. Goldstein, H. A. Zebker, and C. L. Werner, “Satellite Radar Interferometry: Two-dimensional Phase Unwrapping,” Radio Science, vol. 23, no. 4. pp. 713–720, 1988.
[39] V. V Volkov and Y. Zhu, “Deterministic phase unwrapping in the presence of noise,” Opt. Lett., vol. 28, no. 22, pp. 2156–2158, 2003.
[40] K. C. Tan, T. H. Kim, S. I. Chun, W. J. Shin, and C. W. Mun, “A simple, fast, and robust phase unwrapping method to unwrap MR phase images,” IFMBE Proc., vol. 21 IFMBE, no. 1, pp. 487–490, 2008.
[41] V. Elser, “Phase retrieval by iterated projections,” J. Opt. Soc. Am. A, vol. 20, no. 1, pp. 40–55, 2002.