robotic microphone arrays - washington university in st. louis
TRANSCRIPT

Robotic Microphone ArraysRobotic Microphone Arrays
Patricio S. La RosaPatricio S. La RosaCenter for Sensor Signal and Information Processing (CSSIP)Center for Sensor Signal and Information Processing (CSSIP)
Signal Processing Innovations in Research and Information TechnoSignal Processing Innovations in Research and Information Technologieslogies ((SPIRIT) LabSPIRIT) Lab
JanuaryJanuary 20102010
Department of Electrical & Systems Engineering

Faculty
Professor Arye
Nehorai
Research Associate
Ed Richter
PhD Students
Patricio S. La Rosa Phani
Chavali
Undergraduate Students
Chase LaFont, Evan Nixxon, Ian Beil, Raphael Schwartz, Zachary Knudsen
Former Students
Joshua York (BSEE09); Brian Blosser
(BSEE08), Matt Meshalum
(BSEE 09);
Tripp McGehee
(BSEE07)
AcknowledgmentsAcknowledgments

• Background
• Estimation Algorithms
• Control Algorithm
• Experimental Setup
• Demonstration
• Additional Modalities
• Conclusion
OverviewOverview

Goal: Modify microphone array configuration adaptively for improving the performance in estimating acoustic source position using generalized cross-correlation algorithms.
Applications:
•
Teleconference: Speech enhancement and speaker selection
•
Electronic auditory systems
•
Robotic navigation
•
Sniper fire location (defense)
Motivation
BackgroundBackground

R
dL
Problem Description
x Pressure sensors
Acoustic source
BackgroundBackground

Acoustic field as measured by an array of sensors:
•
Far field assumption–
Plane wave shape.
•
Near field assumption–
Spherical source–
Curved wave shape as seen by sensors.
BackgroundBackground
Basic assumptions
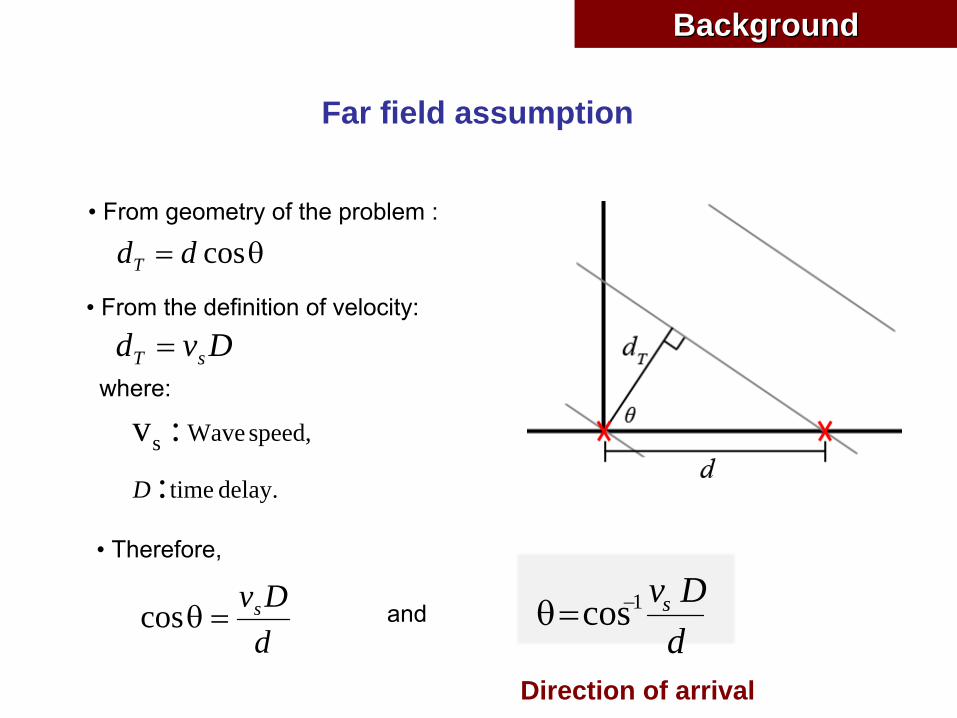
Far field assumption
• From geometry of the problem :
θ= cosddT
• From the definition of velocity:
Dvd sT =
. D delay time
speed, Wave
::vs
where:
• Therefore,
dDvs=θcos
dDvs1cos−=θ
Direction of arrival
and
BackgroundBackground

Near field assumption
Where
•
L is the maximum length of the array
•
λ
is the wavelength of the acoustic field
R
L
λ<
22LR
BackgroundBackground

Combined Approach
R
dL
λ<<
λ
22 22 LRdNear-Field Array/Far-Field sensor pair
BackgroundBackground

Each angle is a function of delay, making position also a function of delay, which is unknown and need to be estimated.
Under near-field array/far-field sensor pair:
x
y
P
x*
y*
ba
dd
1θ2θ
21 θθ ≠
)tan()tan(
)]tan()[tan(2
12
12*
θ−θ
θ+θ−=
P
x
)tan()tan()tan()tan(
12
12*
θ−θθθ−
=Py
Therefore,
Combined Approach (Cont.)
BackgroundBackground

Measurement model
)()()()()()(
212
111
tnDtstxtntstx
++α=+=
Where
• D is the delay,
• n1(t), n2(t) are all real, zero-mean,
jointly stationary independent random processes,
• s1(t) is assumed uncorrelated with n1(t) and n2(t).
Estimation AlgorithmsEstimation Algorithms

• A common method for finding D is to use the cross correlation function:
•
The argument that maximizes this function provides the estimate
of delay D:
)]()([)( 2121ττ −= txtxER xx
21xxRmax)arg(ˆ τ=D
Time-delay estimation
Estimation AlgorithmsEstimation Algorithms

•
In Generalized Cross Correlation, pre-filters are used to improve the accuracy of the time delay results.
Cross Correlation D̂
)(1 fH
)(2 fH
Peak Detection
1x
2x
1y
2y
•
Each method of GCC is defined by its unique weighting function in the frequency domain, which acts as the filter before Cross Correlation takes place. Several well known methods exist for this process.
•
Roth Processor•
Smoothed Coherence Transform (SCOT)•
Phase Transform (PHAT)
Time-delay estimation
•
Eckert Filter•
HT Processor•
Maximum Likelihood (ML)
Estimation AlgorithmsEstimation Algorithms

DOA estimation based on time-delay estimates
•
At each pair of microphones
•
is estimated based on discrete samples, thus,
•
where , and
is the sample cross-correlation.
•
Therefore,
dDv is
i
ˆcos 1−=θ
s
isi fd
nv ˆcosˆ 1−=θ
si fnD /ˆˆ =iD̂
21
~max)arg(ˆ xxRn τ=
21
~xxR
Estimation AlgorithmsEstimation Algorithms
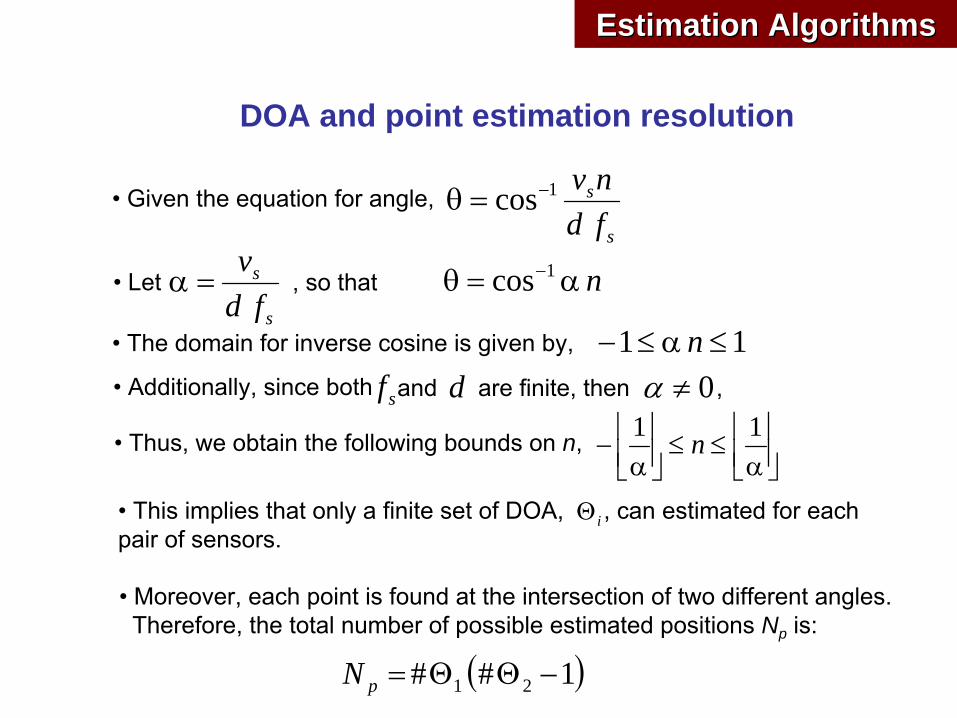
DOA and point estimation resolution
• Given the equation for angle,s
s
fdnv1cos−=θ
• Lets
s
fdv
=α , so that nα=θ −1cos
• The domain for inverse cosine is given by, 11 ≤α≤− n0≠α• Additionally, since both sf and d are finite, then ,
• Thus, we obtain the following bounds on n, ⎥⎦⎥
⎢⎣⎢α
≤≤⎥⎦⎥
⎢⎣⎢α
−11 n
•
This implies that only a finite set of DOA, , can estimated for each pair of sensors.
• Moreover, each point is found at the intersection of two different angles.Therefore, the total number of possible estimated positions Np is:
( )1## 21 −ΘΘ=pN
iΘ
Estimation AlgorithmsEstimation Algorithms

•
If we use the minimum values proposed from the Nyquist
criterion, we are able to estimate only three points per pair.
ffs 2=Nyquist
Criteria: , 2λ
=d
Recall:s
s
fdv
=α
fvs=λwhere, 1
22
==f
fv
vs
sα
• With alpha equal to 1, we can only estimate DOA at 90, 0, and 180.
• The resolution is dependent on both spatial and temporal quantities.
DOA and point estimation resolution (Cont.)
Estimation AlgorithmsEstimation Algorithms

• Using the following parameters:
2510385.0
/34020.
100,44
=⎥⎦⎥
⎢⎣⎢
====
α
αsmv
mdf
s
s
This leads to the possible number of angles per pair of sensors to be 51, making the total number of possible points 2550.
•
As the distance from the array increases, so the gap between the points also increases creating large regions of ambiguity.
Estimation AlgorithmsEstimation Algorithms
Spatial Quantization

Higher Resolution
Large Region of Ambiguity
Estimation AlgorithmsEstimation Algorithms
Spatial Quantization
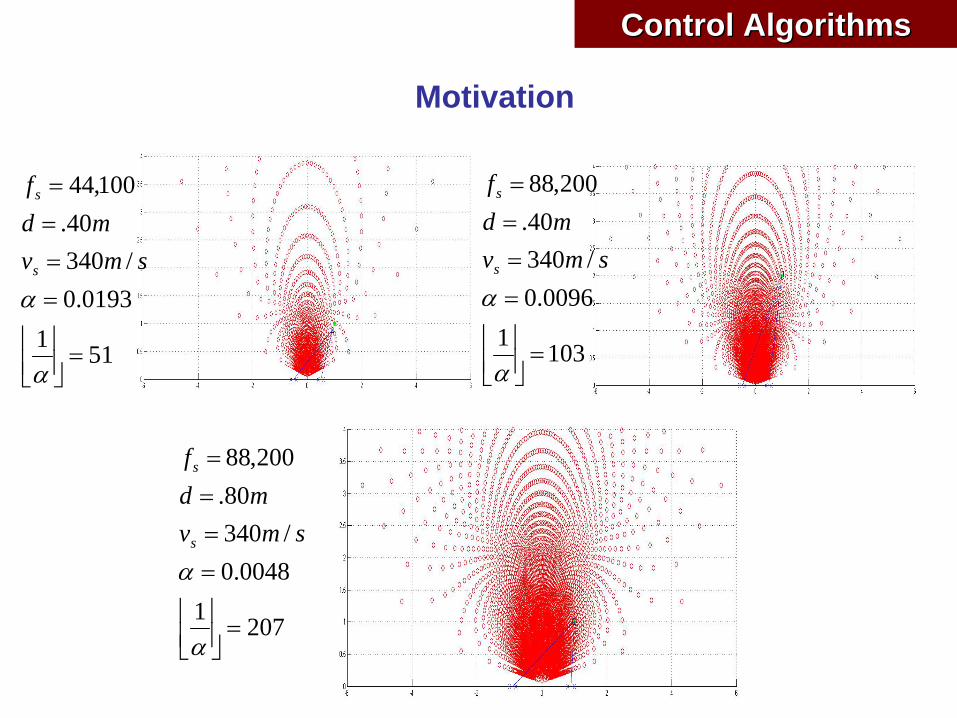
5110193.0
/34040.
100,44
=⎥⎦⎥
⎢⎣⎢
====
α
αsmv
mdf
s
s
10310096.0
/34040.
200,88
=⎥⎦⎥
⎢⎣⎢
====
α
αsmv
mdf
s
s
20710048.0
/34080.
200,88
=⎥⎦⎥
⎢⎣⎢
====
α
αsmv
mdf
s
s
Control AlgorithmsControl Algorithms
Motivation

Control AlgorithmsControl Algorithms
Important Input Variables:
Previous Position
Critical Resolution
Estimated Source Position
Acoustic limitation Distance
Maximizing Resolution:
•
Question 1
–
Is the Microphone Array in near field or far field?
•
Question 2
–
Is the Microphone Array centered around the estimated source position?
•
Question 3
–
Are robots’
movement constrained by physical or acoustic limitations?
•
Question 4
–
I s the current resolution better than the previous resolution at the estimated position?
Heuristic Control Approach

-5 -4 -3 -2 -1 0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
-5 -4 -3 -2 -1 0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
-5 -4 -3 -2 -1 0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Xs = 1.949 Ys
= 2.045 Error = 0.0680
Xs = 2.323 Ys
= 2.405 Error = 0.5180
Xs = 1.949 Ys
= 1.944 Error = 0.0757
Control AlgorithmsControl Algorithms
Heuristic Control Approach
Numerical example

NTXPair of Motors Source Position Estimation
Sensing Acoustic FieldPair of Microphones + DAQ
Sensing parameter adaptation
Robotic Platform 1 Computer for Central Processing
Feedback
NTXPair of Motors
Sensing Acoustic FieldPair of Microphones + DAQ
Robotic Platform 2
Control AlgorithmsControl Algorithms
Closed Loop Description
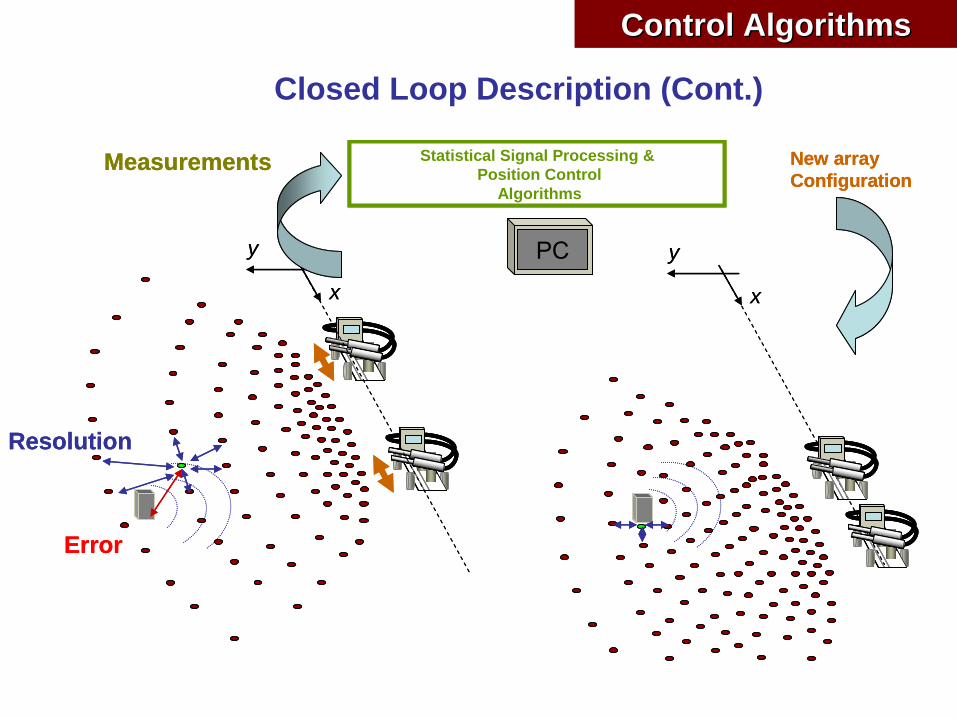
Resolution
y
x
y
x
Error
PC
Statistical Signal Processing &Position Control
Algorithms
Measurements New array Configuration
Resolution
y
x
y
x
Error
PC
Statistical Signal Processing &Position Control
Algorithms
Measurements New array Configuration
Control AlgorithmsControl Algorithms
Closed Loop Description (Cont.)

Hardware Design Software/InterfaceDesign Algorithm Design
Physical/Chemical/BiologicalBackground
Transducer/Sensor Selection
Data Acquisition System(sampling rate and resolution)
Signal Conditioning(analog filter, signal amplifier)
Graphical User Interface (GUI)Design
Real-time Data ProcessingArquitectures
Statistical Signal ProcessingAlgorithms
Preprocessing Algorithms(Digital filters: FIR, IIR)
Graphical display of variablesof interest
User-defined System and Algorithms
parameters
Microcontroller
Actuators (motors)
Robotic Platform Central Processing
Com
mun
icat
ion
Experimental SetupExperimental Setup

Hardware Design
R
L
x
y
x*
y*
?2 ?1
)tan()tan(
)]tan()[tan(2
12
12*
θ−θ
θ+θ−=
P
x
)tan()tan()tan()tan(
12
12*
θ−θθθ−= Py
P dd Sensor
Source
dvs )(cos Delay Time1−=θ
R
L
x
y
x*
y*
?2 ?1
R
L
x
y
x*
y*
R
L
RRRR
L
x
y
x*
y*
x
y
x*
y*
x
y
x*
y*
x
y
x*
y*
x
y
x*
y*
?2 ?1
)tan()tan(
)]tan()[tan(2
12
12*
θ−θ
θ+θ−=
P
x
)tan()tan()tan()tan(
12
12*
θ−θθθ−= Py
P dd Sensor
Source
dvs )(cos Delay Time1−=θ
Physical/Chemical/BiologicalBackground
Experimental SetupExperimental Setup

Algorithm Design
Cross Correlation D̂
)(1 fH
)(2 fH
Peak Detection
1x
2x
1y
2y
Cross Correlation D̂
)(1 fH
)(2 fH
Peak Detection
1x
2x
1y
2y
R
L
x
y
x*
y*
?2 ?1
)tan()tan(
)]tan()[tan(2
12
12*
θ−θ
θ+θ−=
P
x
)tan()tan()tan()tan(
12
12*
θ−θθθ−= Py
P dd Sensor
Source
dvs )(cos Delay Time1−=θ
R
L
x
y
x*
y*
?2 ?1
R
L
x
y
x*
y*
R
L
RRRR
L
x
y
x*
y*
x
y
x*
y*
x
y
x*
y*
x
y
x*
y*
x
y
x*
y*
?2 ?1
)tan()tan(
)]tan()[tan(2
12
12*
θ−θ
θ+θ−=
P
x
)tan()tan()tan()tan(
12
12*
θ−θθθ−= Py
P dd Sensor
Source
dvs )(cos Delay Time1−=θ
Physical/Chemical/Biological Background Statistical Signal Processing Algorithms
)()()()()()(
212
111
tnDtstxtntstx
++α=+=
Measurement Model
Time-delay estimation
Preprocessing Algorithms
• FIR filters
• IIR filters
dDv is
i
ˆcos 1−=θ
DOA estimation at each microphone
Experimental SetupExperimental Setup

Algorithm Design (Cont.)
Statistical Signal Processing Algorithms
Higher Resolution
Region of Ambiguity
Higher Resolution
Region of Ambiguity
Microphones pairs
-5 -4 -3 -2 -1 0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
-5 -4 -3 -2 -1 0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
-5 -4 -3 -2 -1 0 1 2 3 4 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Xs = 1.949 Ys = 2.045 Error = 0.0680Xs = 2.323 Ys = 2.405 Error = 0.5180 Xs = 1.949 Ys = 1.944 Error = 0.0757
Experimental SetupExperimental Setup

Hardware Design
dbx RTA microphone Example of a DC Blocking Filter Diagram DAQ
Transducer/Sensor Selection Signal Conditioning Data Acquisition System
Microcontroller Actuators
NXT ARM7 Servomotor
Robotic Microphone array
Experimental SetupExperimental Setup

Sensors
• Measurement microphone
Experimental SetupExperimental SetupHardware Design
dbx RTA microphone
• Polar Pattern : Omni-directional
• Element : Back Electret
Condenser
• Frequency : 20 Hz -
20 kHz
• Impedance : 250 30% (at 1,000Hz)
•
Sensitivity : -63 dB 3 dB ( 0 dB=1V/ microbar 1,000 Hz indicated by open circuit )
• Operating Voltage : Phantom power 15V D.C.
•
Condenser microphone:
the diaphragm acts as one plate of a capacitor, and the vibrations produce changes in the distance between the plates.
The capacitor requires to be polarized.
•
Electret
microphone: is a type of condenser microphone, which eliminates the need for a polarizing power supply by using a permanently-charged material.
•
Back electret:
An electret
film is applied to the back plate of the microphone capsule and
the diaphragm is made of an uncharged material

D.A.Q
•
The data acquisition system (DAQ) that is used for the acoustic sensing device is the National Instruments NI USB-6210:
16 analog inputs (16-bit, 400 kS/s)2 analog outputs (16-bit, 250 kS/s) 32 digital I/O 2 32-bit counters
• The maximum sampling rate is 400 kS/s
aggregate.
Experimental SetupExperimental SetupHardware Design

Software/Interface Design
Graphical display of variablesof interest
Graphical User Interface (GUI) Design
User-defined System and Algorithms
parametersReal-time Data Processing
Architectures
GUI using Matlab
Real time source location
Spectrogram
Estimated location
• Sensor array configuration
• Data acquisition system
• Preprocessing filters
• Cross-correlation algorithm
Experimental SetupExperimental Setup

Real-time Data Processing Architectures
Experimental SetupExperimental SetupSoftware/Interface Design
•
The proposed system requires the synchronization of signal waveform generation, sound output functionality, data acquisition, signal
processing, plotting of the source estimation, and constructive commands for
robot movement, all occurring in parallel with one another.
•
This system can be modeled as a constant flow of data, which, when considered to be a sequence of events, occurs as is shown
Source location
algorithm
Source location
algorithm
Waveform generatorWaveform generator
Sound output & speaker
Sound output & speaker
Data Acquisition
Data Acquisition
FilterFilter
Cross correlation
Cross correlationIncoming
angle algorithm
Incoming angle
algorithm
Robot controller
Robot controller
Array of microphones
Array of microphones
Source location
algorithm
Source location
algorithm
Waveform generatorWaveform generator
Sound output & speaker
Sound output & speaker
Data Acquisition
Data Acquisition
FilterFilter
Cross correlation
Cross correlationIncoming
angle algorithm
Incoming angle
algorithm
Robot controller
Robot controller
Array of microphones
Array of microphones

Real-time Data Processing Architectures
Experimental SetupExperimental SetupSoftware/Interface Design
•
In real time the processes occurring in parallel with respect to one another and can be more accurately represented by the figure in the left.
•
To implement parallel processes we use a Data Flow Programming approach in which the flow of data rather than the sequential order of commands determines the execution order of block diagram elements.
•
A block diagram node executes when it receives all required inputs. When a node executes, it produces output data and passes the data to the next node in the dataflow path. The movement of data through the nodes determines the execution order and functions on the block diagram.
Sound Output & Waveform Generation
Sound Output & Waveform Generation
Data Acquisition
& Mics
Data Acquisition
& Mics
Processing & PlottingProcessing & Plotting
Controller & RobotsController & Robots
Sound Output & Waveform Generation
Sound Output & Waveform Generation
Data Acquisition
& Mics
Data Acquisition
& Mics
Processing & PlottingProcessing & Plotting
Controller & RobotsController & Robots

Given the parallel architecture that real-time processing demands, we opted to build our system in the dataflow programming environment, LabVIEW.
Experimental SetupExperimental SetupSoftware/Interface Design
Real-time Data Processing Architectures
Sound Output & Waveform Generation
Sound Output & Waveform Generation
Data Acquisition
& Mics
Data Acquisition
& Mics
Processing & PlottingProcessing & Plotting
Controller & RobotsController & Robots
Sound Output & Waveform Generation
Sound Output & Waveform Generation
Data Acquisition
& Mics
Data Acquisition
& Mics
Processing & PlottingProcessing & Plotting
Controller & RobotsController & Robots

•
To provide the system with a centralized control, we used LabVIEW’s
front panel interface.
•
The G.U.I provides the user with an interactive tool that manages all of the acquisition, processing, and robot movement and analysis.
•
This approach allows the user to vary parameters rapidly in a user friendly environment.
•
This approach also allowed us to expand our analytical tools and explore simulated concepts while comparing them to actual experimental results
Centralized Control and Signal Processing
Experimental SetupExperimental SetupSoftware/Interface Design
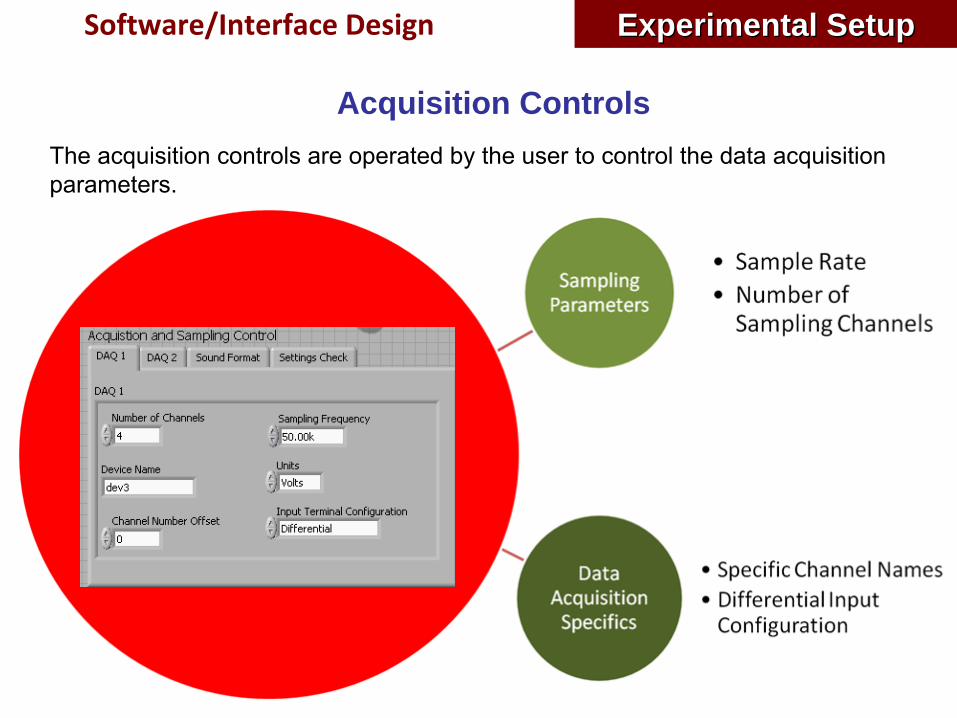
Acquisition ControlsThe acquisition controls are operated by the user to control the
data acquisition parameters.
Software/Interface Design Experimental SetupExperimental Setup

Signal Generation Controls
Signal Generation controls are operated by the user to control the type of the outgoing waveform.
Software/Interface Design Experimental SetupExperimental Setup

Processing and Filtering
The Processing controls provide the user with the ability to filter the data using a particular cutoff frequency. The GCC method is also selected on this menu.
Software/Interface Design Experimental SetupExperimental Setup

Robotic Movement Controls
Initial robot position and rotation is chosen. Limitations on movement based on physical surroundings are entered. Parameters algorithm uses to
determine real time movement are also used.
Software/Interface Design Experimental SetupExperimental Setup

Simulation Controls
Simulation controls set the simulated position of the sound source. They also control simulated noise and sampling frequency.
Software/Interface Design Experimental SetupExperimental Setup

Analysis IndicatorsThese indicators provides the analytical tools for the user to view the data and estimations. The estimations from processing are shown for the delays, angles, and position. Plots are also displayed in real time.
Software/Interface Design Experimental SetupExperimental Setup

Available Plot Types
The plot types available in the GUI are shown below.
Software/Interface Design Experimental SetupExperimental Setup

Demonstration at the WUSTL Undergraduate Research Symposium,Demonstration at the WUSTL Undergraduate Research Symposium,October 24October 24thth, 2009, 2009
DemonstrationDemonstration

Demonstration at BH 316 November 2009Demonstration at BH 316 November 2009
DemonstrationDemonstration
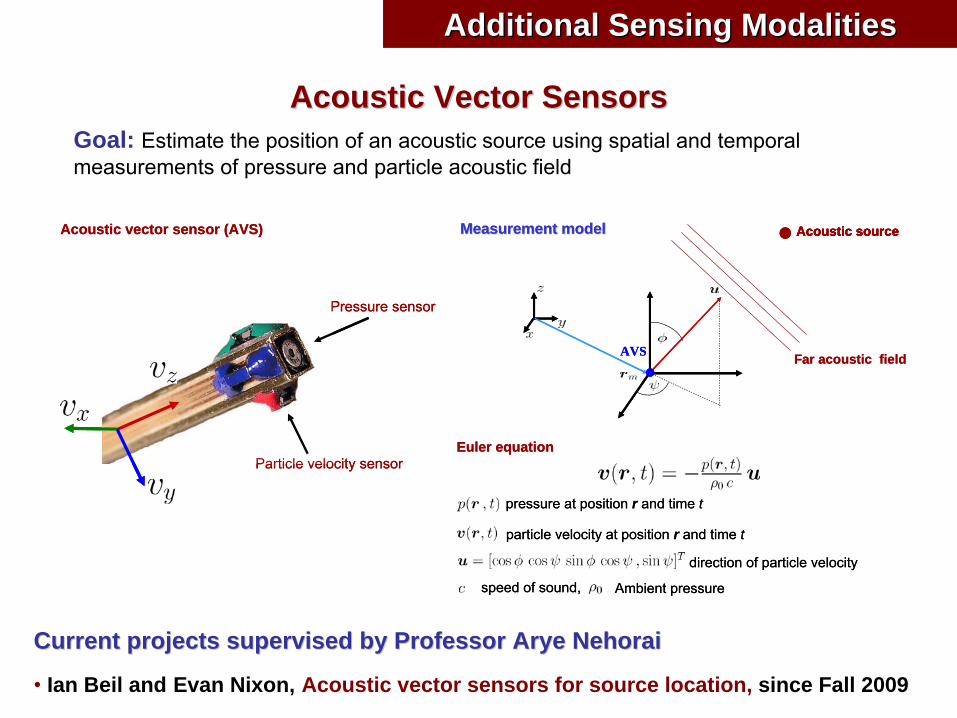
Acoustic Vector SensorsAcoustic Vector Sensors
Current projects supervised by Professor Current projects supervised by Professor AryeArye NehoraiNehorai
• Ian Beil and Evan Nixon, Acoustic vector sensors for source location, since Fall 2009
Microphones
Goal: Estimate the position of an acoustic source using spatial and temporal measurements of pressure and particle acoustic field
Pressure sensor
Particle velocity sensor
Acoustic vector sensor (AVS)
Pressure sensor
Particle velocity sensor
Acoustic vector sensor (AVS) Measurement modelMeasurement model Acoustic source
AVS Far acoustic field
Acoustic sourceMeasurement modelMeasurement model Acoustic source
AVS Far acoustic field
Acoustic source
Euler equation
pressure at position r and time t
particle velocity at position r and time t
direction of particle velocity
speed of sound, Ambient pressure
Euler equation
pressure at position r and time t
particle velocity at position r and time t
direction of particle velocity
speed of sound, Ambient pressure
Additional Sensing ModalitiesAdditional Sensing Modalities

Signal conditioner
DAQ
Array of AVS Capon Spectra
Signal conditioner
DAQ
Array of AVS Capon Spectra
Above: Diagram of experimental setup; Power distribution as a function of azimuth and elevation. The red arrow indicates the maximum spectral value.
Right: Experimental setup at SPIRIT LAB
Additional Sensing ModalitiesAdditional Sensing Modalities
Acoustic Vector Sensors (Cont.)Acoustic Vector Sensors (Cont.)

SummarySummary
•
We proposed a novel concept and built a robotic platform that allows to improve the performance in estimating adaptively the location of
an acoustic source in 2D using an array of microphones
•
We proposed a general methodology for implementing robotic sensing systems which facilitates the construction of our experimental setup.
•
We implemented real-time processes using a data flow programming approach which allows to track a moving acoustic source in 2D
Future WorkFuture Work•
We are working on adding additional degrees of freedom to the robots such as rotation and displacement in 2D.
•
We will implement a wireless communication between the robots and the central processing unit.
ConclusionConclusion