robotic mapping: an architectural approach
TRANSCRIPT

Robotic Mapping:
an architectural approach
S. Bonetti - F. Fiamberti - D. Micucci - F. Tisato D.I.S.Co. University of Milano-Bicocca - Italy
1
D I P A R T I M E N T O
D I I N F O R M A T I C A
S I S T E M I S T I C A
E C O M U N I C A Z I O N E
D I P A R T I M E N T O
D I I N F O R M A T I C A
S I S T E M I S T I C A
E C O M U N I C A Z I O N E

The problem
Building an environment map by means
of a mobile entity based on low-cost
sensors
Low-cost sensors have limited accuracy,
precision and efficiency
2

Our idea
• Use of multiple, heterogeneous sensors
• «smart» management of sensor
activations in a context-aware
approach
3
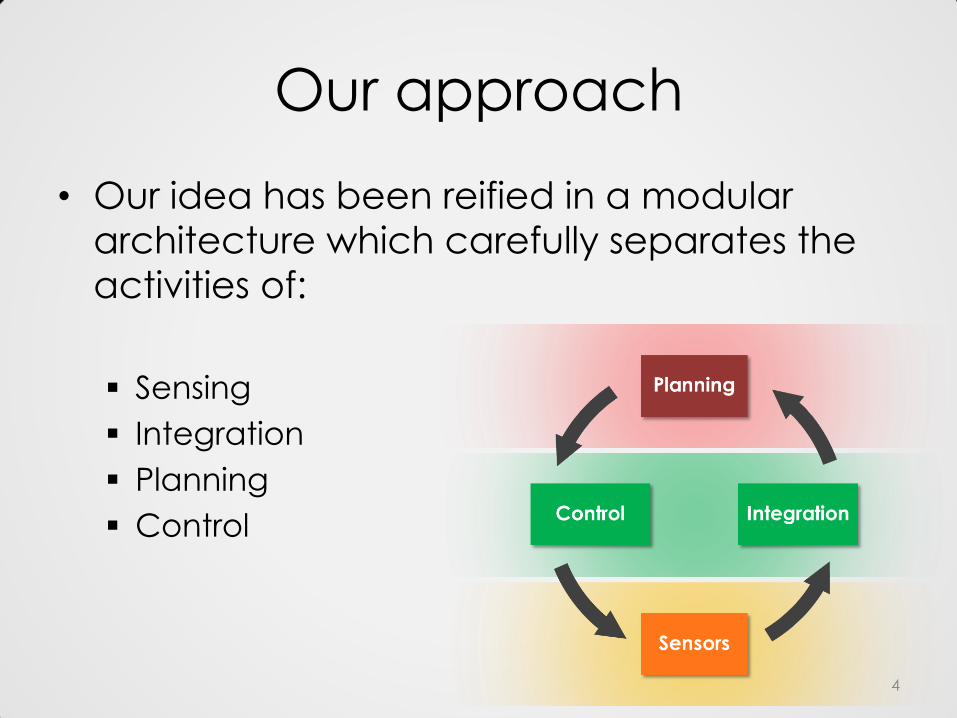
Our approach
• Our idea has been reified in a modular
architecture which carefully separates the
activities of:
Sensing
Integration
Planning
Control
4

Our prototype
• Directionable Laser Range Finder
• RGB Camera 5

It contextualizes data produced by the associated physical sensor as an occupancy map
SOM: Sensor Occupancy Map
SOM
Map Update
Data
Acquisition
Raw Data
ActivityInitial
ActivityFinal
Sensor Component
cell i j = P H sn
Real environment Occupancy map
6

Sensor Component
Laser orientation
Entity frame of reference
World frame of reference
7
SOM
Map Update
Data
Acquisition
Raw Data
ActivityInitial
ActivityFinal

Sensor Component
Entity frame of reference
World frame of reference
Camera FOV
Edge
8
SOM
Map Update
Data
Acquisition
Raw Data
ActivityInitial
ActivityFinal
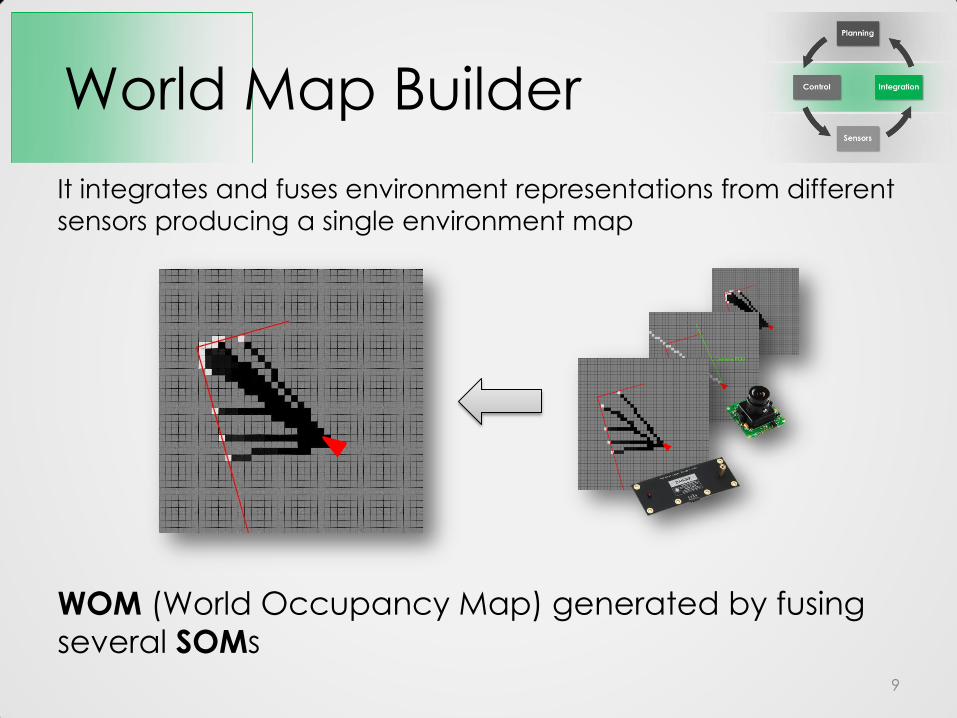
WOM (World Occupancy Map) generated by fusing
several SOMs
World Map Builder
9
It integrates and fuses environment representations from different
sensors producing a single environment map

WOM WRMAnalysis &
Planning
It implements the application strategy for the map construction
WRM (World Relevance Map)
Application Strategy
Low relevance High relevance
10
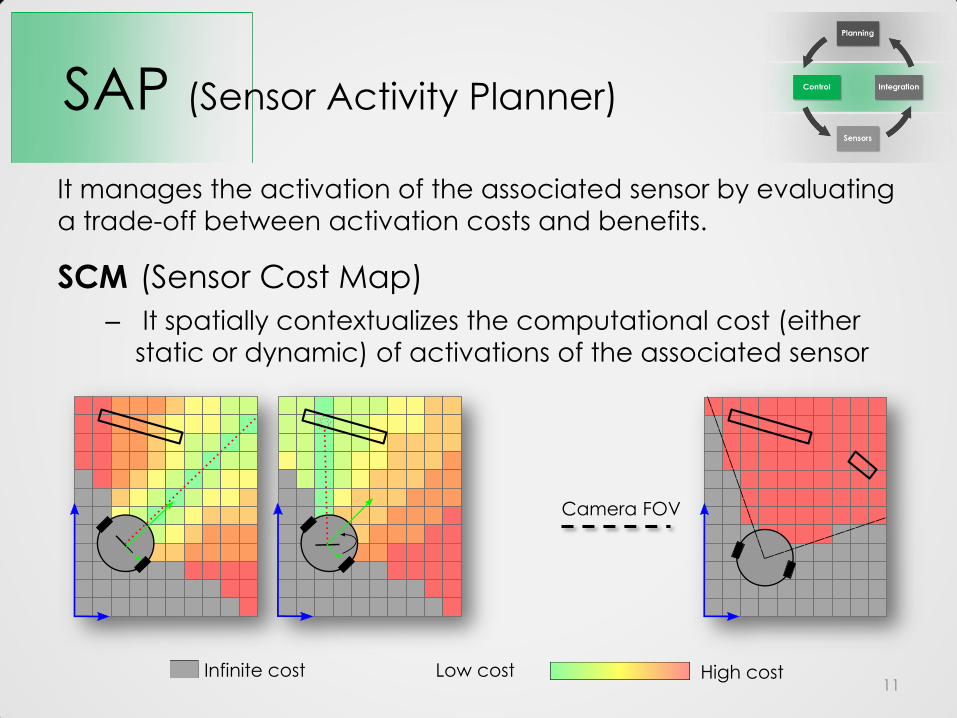
It manages the activation of the associated sensor by evaluating
a trade-off between activation costs and benefits.
SCM (Sensor Cost Map)
– It spatially contextualizes the computational cost (either
static or dynamic) of activations of the associated sensor
SAP (Sensor Activity Planner)
Infinite cost Low cost High cost 11
Camera FOV
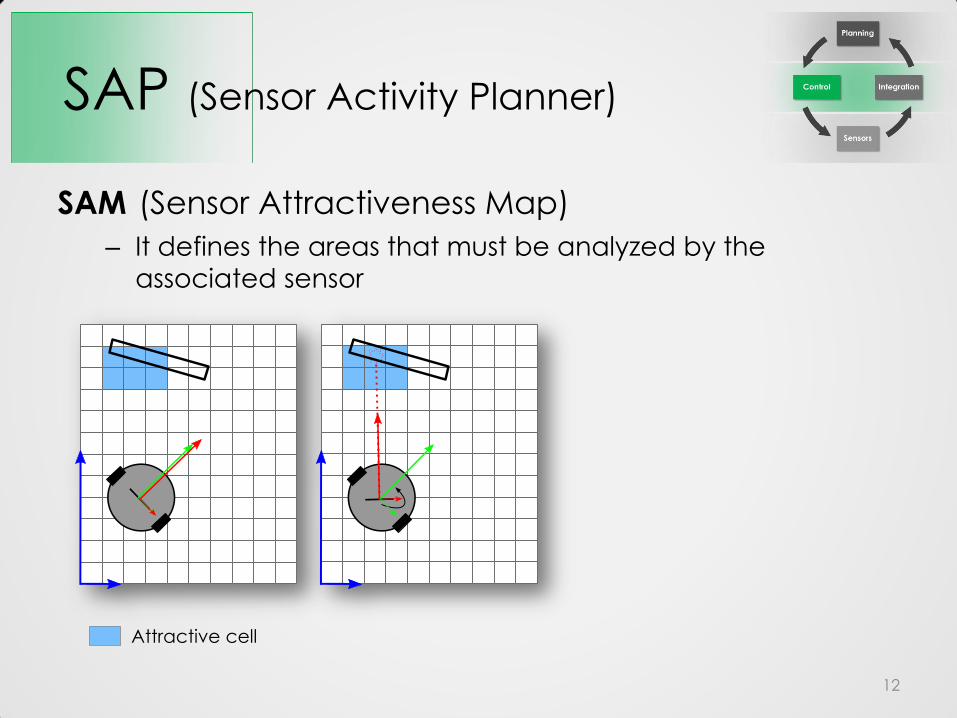
SAM (Sensor Attractiveness Map)
– It defines the areas that must be analyzed by the
associated sensor
SAP (Sensor Activity Planner)
12
Attractive cell

SOM
Map Update
Raw Data
SAM Analysis
Data Acquisition
SAM
ActivityInitial
ActivityFinal
ActivityInitial
Identification of
Interesting AreasWRM
*
Grid Cell
Coordinate
Sensor Activity
Planification
ActivityFinal
SCM
SAP (Sensor Activity Planner)
SOM WRM SCM
SAM
13
SC SAP

Virtual SC
Sensor Component
Virtual Sensor Component
14
SOMMap Update
Data Acquisition
SAM AnalysisSAM
ActivityInitial
ActivityFinal
SCM
Raw Data
SOMMap Update
SOM Analysis and
Processing
SAM AnalysisSAM
ActivityInitial
ActivityFinal
SCM
SOM

Complete architecture
Application
Strategy
World
Map Builder
Sensor
Activities
Planner
Sensor
Component
SAM SCM SOM
Virtual
Sensor
Component
Sensor
Activities
Planner
SAM SCM SOM
Sensor
Activities
Planner
Sensor
Component
SAM SCM SOM
WOM WRM
15
…
…
…
…

A first implementation
Application
Strategy
World
Map Builder
Sensor
Activities
Planner
Sensor
Component
SAM SCM SOM
Sensor
Activities
Planner
Sensor
Component
SAM SCM SOM
WOM WRM
16

A concrete example
Start-up situation
WOM WRM
Laser SOM Camera SOM 17
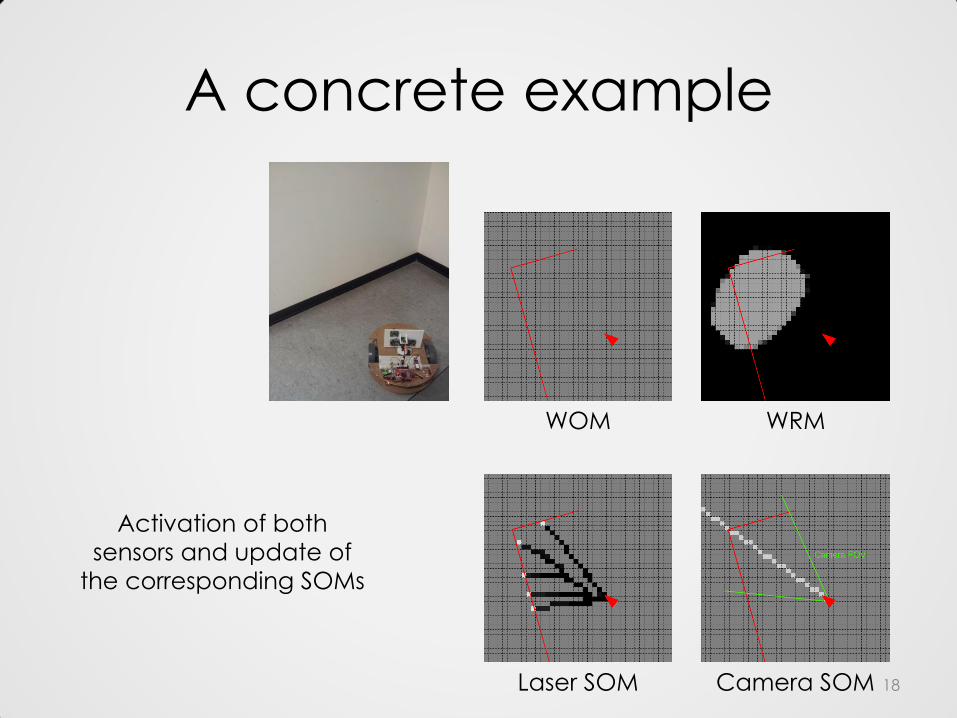
Activation of both
sensors and update of
the corresponding SOMs
WOM WRM
Laser SOM Camera SOM
A concrete example
18
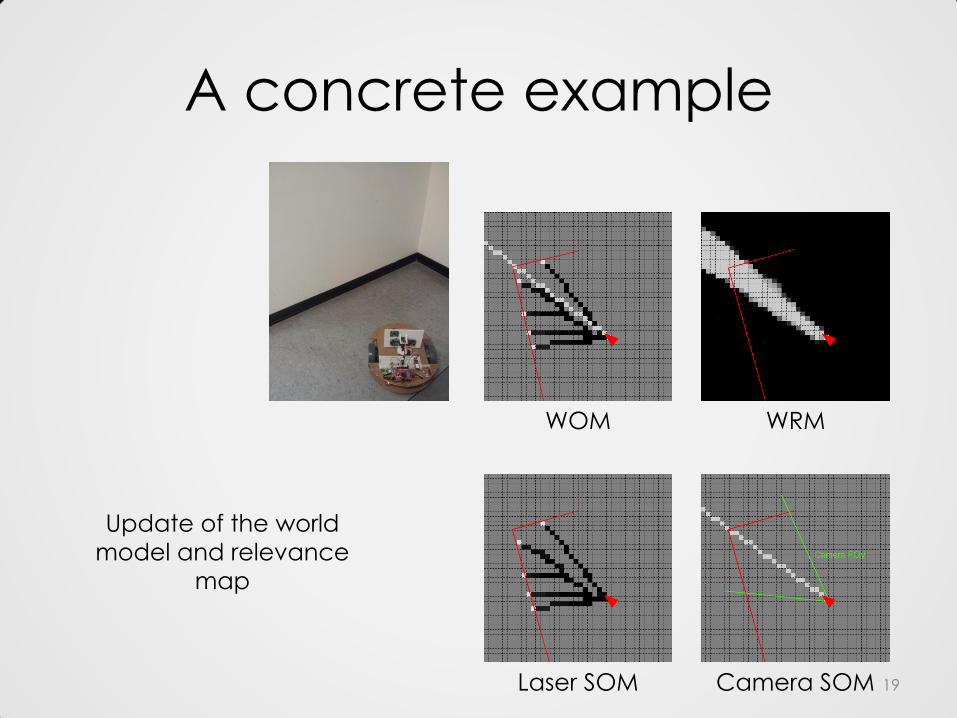
Update of the world
model and relevance
map
WOM WRM
Laser SOM Camera SOM
A concrete example
19

Activation of the laser
sensor
WOM WRM
Laser SOM Camera SOM
A concrete example
20

Update of the world
model and choice of a
new strategy
WOM WRM
Laser SOM Camera SOM
?
A concrete example
21

Conclusions and comments
• The proposed architecture is:
– Scalable
– Modular
– Open
– Independent of application strategies
• Future developments:
– Extensive experimentations
– Integration with additional sensor typologies
– Application to real-life cases
22

23
Questions & Answers
• Q1 : what are the problems of software development in robotics that can be considered "solved"?
Allowing for the application of low-cost/low-performance sensors to the
problem of robotic mapping. In fact, such a problem is known to involve large
amounts of data to be elaborated and fused.
• Q2 : what are the solutions to these problems that can be considered best
practice and why?
Separation of concerns, which allows to dominate the problem’s complexity by decomposing the system in sub-components.
• Q3 : to what extent the solutions to these problems are robotic-specific?
The approach is general and should be used every time a system is made of
multiple activities. The specific approach is aimed at solving a robotic-specific
issue.
24

Questions & Answers
• Q4 : what problems of software development in robotics remain to be solved?
The definition of a sensible strategy for every decisional component.
• Q5 : why state-of-the art software technology is not adequate to solve these
problems?
To the knowledge of the authors, no solutions to the robotic mapping problem
exist which exploit both an architectural approach and the use of low-cost
sensors.
• Q6 : what are the promising research directions to solve the open problems?
Performing thorough experimentations to test the validity of the approach
and devise correct strategies for the decisional components.
25