research article adaptive sliding mode control of mems...
TRANSCRIPT

Research ArticleAdaptive Sliding Mode Control of MEMS Gyroscope Based onNeural Network Approximation
Yuzheng Yang and Juntao Fei
Jiangsu Key Laboratory of Power Transmission and Distribution Equipment Technology College of IOT EngineeringHohai University Changzhou 213022 China
Correspondence should be addressed to Juntao Fei jtfeiyahoocom
Received 21 December 2013 Revised 5 March 2014 Accepted 9 March 2014 Published 8 April 2014
Academic Editor Huijun Gao
Copyright copy 2014 Y Yang and J Fei This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
An adaptive sliding controller using radial basis function (RBF) network to approximate the unknown system dynamicsmicroelectromechanical systems (MEMS) gyroscope sensor is proposed Neural controller is proposed to approximate theunknown system model and sliding controller is employed to eliminate the approximation error and attenuate the modeluncertainties and external disturbances Online neural network (NN) weight tuning algorithms including correction terms aredesigned based on Lyapunov stability theory which can guarantee bounded tracking errors as well as bounded NN weights Thetracking error bound can bemade arbitrarily small by increasing a certain feedback gain Numerical simulation for aMEMS angularvelocity sensor is investigated to verify the effectiveness of the proposed adaptive neural control scheme and demonstrate thesatisfactory tracking performance and robustness
1 Introduction
MEMS gyroscopes have become themost growingmicrosen-sors for measuring angular velocity in recent years due totheir compact size low cost and high sensitivity Fabricationimperfections always result in some cross stiffness and damp-ing effects and the performance of the MEMS gyroscopeis deteriorated by the effects of time varying parametersquadrature errors and external disturbances Therefore it isnecessary to utilize advanced controlmethods tomeasure theangular velocity and minimize the cross coupling terms
During the past few years advanced control approacheshave been proposed to control the MEMS gyroscope Leland[1] presented an adaptive controller for tuning the naturalfrequency of the drive axis of a vibratory gyroscope Park et al[2] presented an adaptive controller for a MEMS gyroscopewhich drives both axes of vibration and controls the entireoperation of the gyroscope Batur et al [3] developed asliding mode controller and adaptive controller for a MEMSgyroscope Robust adaptive controller has been developedusing adaptive sliding mode control to control the vibrationofMEMS gyroscope [4] Tsai and Sue [5] proposed integratedmodel reference adaptive control and time-varying angular
rate estimation algorithm for micromachined gyroscopesRaman et al [6] developed a closed-loop digitally controlledMEMS gyroscope using unconstrained sigma-delta forcebalanced feedback control Since neural network has thecapability to approximate any nonlinear function over thecompact input space RBFrsquos properties make them attractivefor interpolation and functional modeling Therefore neuralnetworkrsquos learning ability makes it a useful tool for adaptiveapplication Lewis et al [7 8] developed neural networkapproaches for robot manipulator Feng [9] presented acompensating scheme for robot tracking based on neuralnetworks and Lin and Chen [10] used neural network basedrobust nonlinear control for a magnetic levitation systemPark et al [11] developed adaptive neural sliding modecontrol for the nonholonomic wheeled mobile robots withmodel uncertainty Sadati andGhadami [12] derived adaptivemultimodel sliding mode control of robotic manipulatorsusing soft computing Lee and Choi [13] used neural networkbased robust nonlinear control for a magnetic levitationsystem Lin et al [14] developed an adaptive RBF neuralnetwork controller for robot manipulators Huang et al[15] developed a novel RBF sliding mode controller for adynamic absorber An adaptive neural compensation scheme
Hindawi Publishing CorporationJournal of Applied MathematicsVolume 2014 Article ID 159047 8 pageshttpdxdoiorg1011552014159047
2 Journal of Applied Mathematics
without sliding mode method for tracking control of MEMSgyroscope was proposed [16] In [17] robust adaptive slidingmode control is utilized to estimate the angular velocity ofMEMS triaxial gyroscope and neural network is adopted toestimate the upper bound of system nonlinearities In [18] aninput-output linearization technique is incorporated into theneural adaptive tracking control to cancel the nonlinearitiesand the adaptive neural network is used to perform thelinearization control law In this paper different from [16ndash18]neural controller is proposed to approximate the unknownsystem model and sliding mode controller is employed toeliminate the approximation error and attenuate the modeluncertainties and external disturbances In order to improvethe tracking performance of MEMS gyroscope a robustadaptive control strategy of MEMS gyroscope using neuralsliding compensator is developed The proposed controlstrategy has the following advantages
(1) An adaptive neural slidingmode control is adopted toon-line mimic the unknown model and compensatethe approximation error It incorporates RBF neuralnetwork into the adaptive sliding control system ofMEMS gyroscope to learn the approximate modelAdaptive neural sliding mode compensation schemeis proposed to deal with the model approximationin the presence of model uncertainties and externaldisturbances
(2) This paper integrates adaptive control sliding modecontrol and the nonlinear approximation of neuralnetwork control Neural controller is proposed toapproximate the unknown system model and slidingcontroller is employed to eliminate the approximationerror and attenuate the model uncertainties andexternal disturbances
(3) The proposed adaptive neural sliding controller doesnot need to establish accurate mathematical modeland has the ability to approximate the nonlinear char-acteristics of system model The proposed adaptiveneural network slidingmode controller can guaranteethe stability of the closed-loop system and improvethe robustness for external disturbances and modeluncertainties
The paper is organized as follows In Section 2 thedynamics of MEMS gyroscope is described In Section 3problem is formulated In Section 4 an adaptive RBFnetworkcompensation is derived to guarantee the asymptotic stabilityof the closed-loop system Simulation results are presented inSection 5 to verify the effectiveness of the proposed adaptiveneural compensation control Conclusions are provided inSection 6
2 Dynamics of MEMS Gyroscope
The dynamics of vibratory MEMS gyroscope is described inthis section A two-axis MEMS vibratory gyroscope mainlycontains three parts one is the sensitive element of singleproof mass (119898) suspended by spring beams another iselectrostatic actuations and sensing mechanisms for forcing
an oscillatorymotion and sensing the position and velocity ofthe sensitive element and the other is the rigid frame whichis rotated along the rotation axis
A schematic model of a two-axis MEMS vibratory gyro-scope is shown in Figure 1 As an electromechanical systemfor special use the initial and the most important step isto derive the motion equations In this section the motionequations ofMEMS gyroscope are derived based on Lagrangeequation
dd119905(
120597119871
120597119894
) minus
120597119871
120597119909119894
+
120597119865
120597119894
= 119876119894 (1)
where 119871 = 119864119870minus 119864119875
is Lagrangersquos function 119864119870
and119864119875are kinetic and potential energies of the sensitive ele-
ment respectively 119865 denote the generalized damping forces119876119894are generalized forces acting on the sensitive element
and 119894 ranges from 1 to the number of degrees of freedomunder consideration In our case it will be 2
Let us introduce the right-handed orthogonal referenceframe 119874119883119884 in which drive oscillation are excited alongthe 119909-axis and sense oscillation occurs along the 119910-axisAssume a generalized coordinate 119909 as the displacement ofthe sensitive element along the 119909-axis Similarly general-ized coordinate 119910 corresponds to the displacements of thesensitive element along the 119910-axis The arbitrary angularrate Ω is defined by its projections on the introduced abovereference frame as Ω = Ω
119909 Ω119910 Ω119911 where the third 119911-axis
is perpendicular to the paperThe total kinetic energy of the sensitive element in our
case will be
119864119870=
119898
2
[( minus 119910Ω119911)2+ ( 119910 + 119909Ω
119911)2+ (119910Ω
119909minus 119909Ω119910)
2
] (2)
Potential energy of the sensitive element is formed bystiffness of its springs and is given by
119864119875=
119896119909
2
1199092+
119896119910
2
1199102 (3)
where 119896119909is the total stiffness of the elastic suspension along
the 119909-axis and 119896119910is the total stiffness along the 119910-axis
Now using the Lagrange equation (1) the following motionequations that reveal the dynamics of MEMS gyroscope willappear after some simple transformations
119898 + 119889119909119909 + 119898 (120596
2
119909minus Ω2
119910minus Ω2
119911) 119909
minus 2119898Ω119911119910 + 119898 (Ω
119909Ω119910+ Ω119911) 119910 = 119906
119909
119898 119910 + 119889119910119910119910 + 119898 (120596
2
119910minus Ω2
119909minus Ω2
119911) 119910
+ 2119898Ω119911 + 119898 (Ω
119909Ω119910minus Ω119911) 119909 = 119906
119910
(4)
where 1205962119909= 1198961119898 and 1205962
119910= 1198962119898 are natural frequencies
of drive and sense oscillations mode respectively 119889119909119909 and
119889119910119910119910 are the damping forces terms minus119898(Ω2
119910+ Ω2
119911)119909 and
minus119898(Ω2
119909+Ω2
119911)119910 are called centripetal forces119898Ω
119911119910 and119898Ω
119911
are Euler forces 2119898Ω119911119910 and 2119898Ω
119911 are the Coriolis forces
Journal of Applied Mathematics 3
and used to reconstruct the unknown external angular rateΩ119911 119906119909and 119906
119910are external forces or control inputs
Assuming that the external angular rate is almost constantover a long enough time interval under typical assumptionsΩ119909asymp Ω119910asymp 0 only the 119911-axis component of the angular
rate Ω119911causes a dynamic coupling between the two axes
Taking fabrication imperfections into account which causeextra coupling between the two axes the motion equations ofa MEMS gyroscope is finally given by
119898 + 119889119909119909 + 119889119909119910119910 + 119896119909119909119909 + 119896119909119910119910 = 119906
119909+ 119889119909+ 2119898Ω
119911119910
119898 119910 + 119889119909119910 + 119889119910119910119910 + 119896119909119910119909 + 119896119910119910119910 = 119906
119910+ 119889119910minus 2119898Ω
119911
(5)
where 119889119909119909 119889119910119910 119896119909119909 and 119896
119910119910are damping and spring coef-
ficients 119889119909119910
and 119896119909119910 called quadrature errors are coupled
damping and spring terms respectively mainly due to theasymmetries in suspension structure and misalignment ofsensors and actuators Bounded unknown disturbances aredenoted by 119889
119909and 119889
119910 It is noted that the coupled damping
coefficient between 119909- and 119910-axis is far smaller than 119909-axisor 119910-axis own damping coefficient that is 119889
119909119910≪ 119889119909119909
and119889119909119910≪ 119889119910119910
Rewriting the gyroscope dynamics into vector formsresults in
119872q + 119863q + 119870q = 120591 minus 2Ωq + 120591119889 (6)
where q = [ 119909119910 ] 120591 = [ 119906119909119906119910] 120591119889= [119889119909
119889119910
] 119872 = [119898 0
0 119898] 119863 =
[
119889119909119909119889119909119910
119889119909119910119889119910119910
] 119870 = [ 119896119909119909 119896119909119910119896119909119910119896119910119910
] andΩ = [ 0 minus119898Ω119911119898Ω1199110]
3 Problem Formulation
All the MEMS gyroscope parameters in (6) cannot be knownprecisely This may arise because the MEMS gyroscope isbeing subjected to unknown angular rate or because theexact evaluation of the gyroscopersquos dynamic is too costlyThe dynamical model contains model uncertainties externaldisturbance and even some nonlinearities We assume theexternal disturbances are bounded that is 120591
119889 le 119887
119889 for
some unknown positive constant 119887119889
Let q119889= [119909119889 119910119889]119879 denote the desired trajectory of the
proof mass in the 119909-119910 planDefine the tracking error as follows
e (119905) = q119889 (119905) minus q (119905) (7)
The sliding mode is defined as
r (119905) = e (119905) + Λe (119905) (8)
where Λ = Λ119879gt 0 is a design parameter matrix
Differentiating r(119905) and using (6) the MEMS gyroscopedynamics can be expressed as
119872 r = minus119863r minus 120591 + f (x) minus 120591119889 (9)
where the unknown gyroscope function is
f (x) = 119872 (q119889 + Λe) + 119863 (q119889 + Λe) + 119870q + 2Ωq (10)
Supporting frame
Driving axis
Sensing axis
Y
XO
y
x
kxx
kyy
dyy
dxx
m
Ωz
Figure 1 Schematic model of a two-axis MEMS vibratory gyro-scope
and x isin R10 are the available measured signals
x = [e119879 e119879 q119879119889
q119879119889
q119879119889]
119879
(11)
If we can reconstruct an estimate of f(x) using x by somemeans not yet disclosed we now define a control input as
120591 =f (x) + 119870Vr (12)
where gain matrix 119870V = 119870119879
V gt 0 and f(x) is the estimate off(x) The closed-loop system becomes
119872 r = minus119863r minus f minus 119870Vr + f minus 120591119889
= minus (119870V + 119863) r + f minus 120591119889(13)
where the functional estimation error is given by
f = f minus f (14)
Equation (13) is an error systemwherein the slidingmodeis driven by the functional estimation error The control1205910incorporates a proportional-plus-derivative (PD) term in
119870Vr = 119870V(e+Λe) In the next section we will use (13) to focuson selectingNN tuning algorithms that guarantee the stabilityof the sliding mode r(119905)
4 Adaptive Neural Network Controller
41 RBF Neural Network RBF neural network has the uni-versal approximation property that states that any sufficientlysmooth function can be approximated by a suitable large net-work for all inputs in a compact set and the resulting functionreconstruction error is bounded The RBF network has a fastconvergence property and a simple architectureTherefore inthis section we apply RBF network for compensating for theunknown dynamics part in Section 2
4 Journal of Applied Mathematics
Inputlayer layer
layer
Hidden
Output
x1
x2
xn
w1
w2
wm
ysum
1206011
1206012
120601m
Figure 2 Architecture of RBF network
MMESgyroscope
Sliding surface Gain
NNcontroller
minus
τ
uqre
K
qd
r = + Λe
Figure 3 Adaptive NN control structure
The structure of RBF neural network is a three-layer feedforward network shown as in Figure 2 The output of an RBFneural network can be described as
119910119894=
1198992
sum
119895=1
120596119894119895120601119895 119894 = 1 2 119899
3
120601119895 (x) = 119892(
10038171003817100381710038171003817x minus c119895
10038171003817100381710038171003817
120590119895
) 119895 = 1 2 1198992
(15)
where 1198992and 1198993are the numbers of hidden and output nodes
respectively and x isin R1198991 and 120596119894119895is the weight connecting
the 119895th hidden node to the 119894th output node119910119894is the output of
the 119894th node 120601119895(x) is the 119895th radial basis function c
119895isin R1198991 is
the center vector and120590119895represents thewidth of the 119895th hidden
nodeThe activation function119892 is often chosen to beGaussianfunction 119892(120572) = exp(minus1205722)
If the RBF net parameters c119895and 120590
119895are kept fixed the
only adjustable weights 120596 appear linearly with respect to theknown nonlinearity 120601(x) Now the output of RBF NN can berewritten as
y = 119882119879120601 (x) (16)
where119882119879 = [120596119894119895] and 120601(x) = [120601
119895(x)]
120596119894119895is the weight connecting the 119895th hidden node to
the 119894th output node 120601119895(x) is the 119895th radial basis function
Following the above results the unknown MEMS gyro-scope function f(x) can be parameterized by a RBF networkwith output f(x) where is the matrix of adjustable
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus015
minus01
minus005
qdxqx
Posit
ion
trac
king
forx
-axi
s
Figure 4 Position tracking of 119909-axis with adaptive neural slidingcompensator
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus015
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 5 Position tracking of 119910-axis with adaptive neural slidingcompensator
weights We assume that the function f(x) is given by aRBF NN for some constant ldquoidealrdquo NN weights 119882 and thenet reconstruction error 120576(x) is bounded by an unknownconstant 120576
119873as
f (x) = 119882119879120601 (x) + 120576 (x) (17)
where 120576(x) as mentioned above is the NN functional recon-struction error vector For the ideal NN weights 120576(x) le 120576
119873
Meanwhile we assume that the ideal weights are boundedby
119882 le 119882119861 (18)
42 Controller Structure and Error System Dynamics Definethe NN functional estimate of (10) as
f (x) = 119879120601 (x) (19)
Journal of Applied Mathematics 5
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of x-axis
(a)
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of y-axis
(b)
Figure 6 Tracking errors with adaptive neural sliding compensator
with as the estimated values of the ideal RBF NN weights119882
Substituting (19) into (12) yields
120591 = 119882119879120601 (x) + 119870Vr (20)
The proposed NN control structure is shown in Figure 3Using this controller the sliding mode dynamics become
119872 r = minus (119870V + 119863) r + 119879120601 (x) + (120576 minus 120591119889)
= minus (119870V + 119863) r + 1205891(21)
where = 119882 minus and 1205891= 119908119879120601(x) + (120576 minus 120591
119889)
Theorem 1 Let the designed trajectory be bounded the controlinput for (6) given by (20) and weights tuning provided by
= 119865120601 (x) r119879 minus 120574119865 r (22)
with any constant gain matrix 119865 = 119865T gt 0 and scalar designparameter 120574 gt 0 Then for large enough control gain 119870V thesliding mode r(119905) and NN weight estimates are uniformlyultimate bounded Moreover the tracking error may be kept assmall as desired by increasing the gains 119870V in (20)
Proof Consider the following Lyapunov function candidate
119881 =
1
2
r119879119872r + 12
tr (T119865minus1) (23)
where tr(sdot) denotes the matrix trace operator matrix 119865 is theadaptive law gain
Differentiating (23) yields
= r119879119872 r + tr (T119865minus1 )
= minusr119879 (119870V + 119863) r + tr (119879(119865minus1 + 120601 (x) r119879))
+ r119879 (120576 minus 120591119889)
(24)
Substituting (22) in (24) and using the fact that = minus
yield the following expression
= minusr119879 (119870V + 119863) r + 120574 r tr 119879(119882 minus ) + r119879 (120576 minus 120591
119889)
(25)
Since trT(119882 minus ) = ⟨119882⟩
119865minus
2
119865le
119865119882119865minus
2
119865 (25) yields
le minus r119879119870Vr + 120574 r sdot10038171003817100381710038171003817
10038171003817100381710038171003817119865(119882119865
minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
le minus 119870Vminr2+ 120574 r sdot 1003817100381710038171003817
1003817
10038171003817100381710038171003817119865(119882119861minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
= minus r [119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865
times (
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)]
(26)
which is negative as long as the term in braces is positiveCompleting the square yields
119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)
= 120574(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus
119882119861
2
)
2
minus
1205741198822
119861
4
+ 119870Vmin r minus (120576119873 + 119887119889) (27)
which is guaranteed positive as long as
r gt1205741198822
1198614 + (120576
119873+ 119887119889)
119870Vminequiv 119887119903
(28)
or
10038171003817100381710038171003817
10038171003817100381710038171003817119865gt
119882119861
2
+ radic1205741198822
119861
4
+
120576119873+ 119887119889
120574
equiv 119887119882 (29)
Thus is negative outside a compact set this demonstratesthe UUB (uniformly ultimate bounded) of both r and119865 Since any excursions of r or
119865beyond the
bounds given in (28) and (29) respectively lead to a decreasein the Lyapunov function 119871 it follows that the right-handsides of (28) and (29) can be taken as practical bounds onr and
119865 respectively Note from (28) moreover that
arbitrarily small error bounds may be achieved by selectinglarge tracking control gains119870V
6 Journal of Applied Mathematics
Time (s)0 05 1 15 2 25 3 35 4 45 5
0
50
100
minus50
Con
trol i
nput
ofx
-axi
s
(a)
0 05 1 15 2 25 3 35 4 45 5
0
50
100
Time (s)
minus50
Con
trol i
nput
ofy
-axi
s
(b)
Figure 7 Control inputs for gyroscope with adaptive neural sliding compensator ((a) 119906119909 (b) 119906
119910)
0 1 2 3 4 5
0
20
40
60
Time (s)
minus40
minus20
EstimationActual
Appr
oxim
atio
n of
x-a
xis
Figure 8 RBF network approximation of 119909-axis component withadaptive neural sliding compensator
0 05 1 15 2 25 3 35 4 45 5
0
20
40
60
Time (s)
minus40
minus20
minus60
App
roxi
mat
ion
ofy
-axi
s
EstimationActual
Figure 9 RBF network approximation of 119910-axis component withadaptive neural sliding compensator
Remark 2 Given119860 = [119886119894119895] the Frobenius norm is defined by
1198602
119865= tr (119860119879119860) = sum1198862
119894119895 (30)
The associated inner product is ⟨119860 119861⟩119865= tr(119860119879119861) where the
dimensions of 119860 and 119861 are suitable for matrix product
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdxqx
Figure 10 Position tracking of 119909-axis without NN controller
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 11 Position tracking of 119910-axis without NN controller
5 Simulation Analysis
In this section we will evaluate the proposed adaptive neuralnetwork scheme which will require no knowledge of thedynamics not even their structure on the lumped MEMSgyroscope sensor model [3 4] The control objective is tomaintain the gyroscope system to track the desired reference
Journal of Applied Mathematics 7
0 1 2 3 4 5 6 7
0
005Tracking errors
Time (s)
minus005
minus01
Tracking error of x-axis
(a)
Tracking errors
0 1 2 3 4 5 6 7
0
005
Time (s)
minus005
minus01
Tracking error of y-axis
(b)
Figure 12 Tracking errors with neural compensator
trajectory and estimate the unknown function f(x) as in (10)The parameters of the MEMS gyroscope are shown as
119898 = 18 times 10minus7kg 119896
119909119909= 63955Nm
119896119910119910= 9592Nm 119896
119909119910= 12779Nm
119889119909119909= 18 times 10
minus6N sdot sm 119889119910119910= 18 times 10
minus6N sdot sm
119889119909119910= 36 times 10
minus7N sdot sm(31)
The unknown angular velocity is assumed Ω119911= 100 rads
The desired trajectory is defined as 119902119889119909= 01lowastcos(120596
1119905) 119902119889119910=
01 lowast cos(1205962119905) where 120596
1= 617 and 120596
2= 511
The external disturbance is 120591119889= [(sin(617 lowast 119905))2 +
cos(617 lowast 119905) (sin(511 lowast 119905))2 + cos(511 lowast 119905)]119879The gain matrix 119870V was taken as 119870V = diag50 50
sliding parameter Λ = diag5 5 The RBF neural networkis composed of 45 nodes As we will see from the subsequentfigure that the unique PD controller (119870Vr) could ensure thatthe tracking error belongs to a compact set Thus when wedesign the RBF net centroids we constrain our attention onthat compact set and take width 120590 = 1 The response withthese controller parameters when q = 0 and q = 0 is shownin the following figures
Figures 4 and 5 show the proof mass along 119909-axis and119910-axis tracking trajectories respectively Figure 6 depicts thetracking errors It can be seen that the tracking error belongsto a small region with the adaptive RBF sliding compensatorThe control inputs appear in Figure 7 As seen from thefigure the control inputs are continuous and smooth withrespect to time which implies that the proposed controller iseasy to implement Figures 8 and 9 show the approximationof RBF network to unknown MEMS gyroscope functionf(x) The approximation result is impressive because of thesatisfactory performance of the RBFNNAs shown in the twofigures RBF NN could approximate the unknown gyroscopefunction quickly using the available measured signals xthroughout the whole compact set
In order to demonstrate the contribution of RBF NN theresponse without RBF NN is also discussed and shown as inFigures 10 and 11 The responses with the controller 120591 = 119870Vrthat is with no neural network are drawn A PD controllershould give bounded errors if 119870V is large enough and the
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus015
minus01
minus005
minus02
qdxqx
x-a
xis p
ositi
on tr
acki
ng
Figure 13 119909-axis position tracking with neural compensator
tracking errors belong to a compact set It is very clear thatthe addition of the NNmakes a very significant improvementin the tracking performance
To compare the performance of the proposed controllerand the neural compensator without sliding mode methodin [16] Figures 12 13 and 14 show the response with theneural compensator under the same gyroscope parametersand disturbances introduced herein
The tracking results with neural compensator showclearly that both the convergence time and the ultimatetracking error bound are worse than the proposed neuralsliding mode controller demonstrating that adaptive slidingmode controller using neural network approximation couldimprove the dynamic and static performance
6 Conclusion
The trajectory control of the MEMS gyroscope using adap-tive NN controller is investigated A novel weight tuningalgorithm designed based on Lyapunov stability theorem isderived to establish the bounded tracking errors and NNweights which consists of a standard term plus robust signalthat provides the possibility of arbitrary small tracking errorIt is clearly observed that the MEMS gyroscope function
8 Journal of Applied Mathematics
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus01
minus015
minus02
minus005
qdyqy
y-a
xis p
ositi
on tr
acki
ng
Figure 14 119910-axis position tracking with neural compensator
f(x) can be effectively approximated by its estimate f(x)using the RBF neural network and the tracking error ofthe proof mass can be greatly improved in the presence ofmodel uncertainties and external disturbances Numericalsimulations verify the effectiveness of the proposed adaptiveNN compensation scheme to cope with all structured andunstructured uncertainties existing in the MEMS gyroscope
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank the anonymous reviewers for their usefulcomments that improved the quality of the paper This workis partially supported by National Science Foundation ofChina under Grant no 61374100 Natural Science Founda-tion of Jiangsu Province under Grant no BK20131136 theUniversity Graduate Research and Innovation Projects ofJiangsu Province under Grant no CXLX12 0235 and theFundamental Research Funds for the Central Universitiesunder Grant no 2013B24614
References
[1] R P Leland ldquoAdaptive control of a MEMS gyroscope usinglyapunov methodsrdquo IEEE Transactions on Control SystemsTechnology vol 14 no 2 pp 278ndash283 2006
[2] S Park R Horowitz S K Hong and Y Nam ldquoTrajectory-switching algorithm for aMEMS gyroscoperdquo IEEE Transactionson Instrumentation and Measurement vol 56 no 6 pp 2561ndash2569 2007
[3] C Batur T Sreeramreddy and Q Khasawneh ldquoSliding modecontrol of a simulatedMEMS gyroscoperdquo ISA Transactions vol45 no 1 pp 99ndash108 2006
[4] J Fei and C Batur ldquoA novel adaptive sliding mode control withapplication to MEMS gyroscoperdquo ISA Transactions vol 48 no1 pp 73ndash78 2009
[5] N-C Tsai and C-Y Sue ldquoIntegrated model reference adaptivecontrol and time-varying angular rate estimation for micro-machined gyroscopesrdquo International Journal of Control vol 83no 2 pp 246ndash256 2010
[6] J Raman E Cretu P Rombouts and L Weyten ldquoA closed-loop digitally controlled MEMS gyroscope with unconstrainedsigma-delta force-feedbackrdquo IEEE Sensors Journal vol 9 no 3pp 297ndash305 2009
[7] F Lewis S Jagannathan and A Yesildirek Neural NetworkControl of Robot Manipulators Taylor and Francis 1999
[8] F L Lewis K Liu and A Yesildirek ldquoNeural net robotcontroller with guaranteed tracking performancerdquo IEEE Trans-actions on Neural Networks vol 6 no 3 pp 703ndash715 1995
[9] G Feng ldquoA compensating scheme for robot tracking based onneural networksrdquo Robotics and Autonomous Systems vol 15 no3 pp 199ndash206 1995
[10] S-C Lin and Y-Y Chen ldquoRBF network-based sliding modecontrolrdquo in Proceedings of the IEEE International Conference onSystems Man and Cybernetics pp 1957ndash1961 October 1994
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] N Sadati and R Ghadami ldquoAdaptive multi-model slidingmode control of robotic manipulators using soft computingrdquoNeurocomputing vol 71 no 13ndash15 pp 2702ndash2710 2008
[13] M-J Lee and Y-K Choi ldquoAn adaptive neurocontroller usingRBFN for robot manipulatorsrdquo IEEE Transactions on IndustrialElectronics vol 51 no 3 pp 711ndash717 2004
[14] F-J Lin S-Y Chen and K-K Shyu ldquoRobust dynamic sliding-mode control using adaptive RENN for magnetic levitationsystemrdquo IEEE Transactions on Neural Networks vol 20 no 6pp 938ndash951 2009
[15] S-J Huang K-S Huang and K-C Chiou ldquoDevelopmentand application of a novel radial basis function sliding modecontrollerrdquoMechatronics vol 13 no 4 pp 313ndash329 2003
[16] J Fei and Y Yang ldquoAdaptive neural compensation scheme forrobust tracking of MEMS gyroscopesrdquo in Proceedings of IEEEConference on SMC pp 1546ndash1551 Seoul Korea 2012
[17] J Fei and M Xin ldquoAn adaptive fuzzy sliding mode controllerfor MEMS triaxial gyroscope with angular velocity estimationrdquoNonlinear Dynamics vol 24 no 1 pp 201ndash210 2012
[18] J Fei and H Ding ldquoAdaptive neural sliding mode controlof MEMS triaxial gyroscope based on feedback linearizationapproachrdquo in Proceedings of Annual Conference of SICE pp1271ndash1276 Akita Japan 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Journal of Applied Mathematics
without sliding mode method for tracking control of MEMSgyroscope was proposed [16] In [17] robust adaptive slidingmode control is utilized to estimate the angular velocity ofMEMS triaxial gyroscope and neural network is adopted toestimate the upper bound of system nonlinearities In [18] aninput-output linearization technique is incorporated into theneural adaptive tracking control to cancel the nonlinearitiesand the adaptive neural network is used to perform thelinearization control law In this paper different from [16ndash18]neural controller is proposed to approximate the unknownsystem model and sliding mode controller is employed toeliminate the approximation error and attenuate the modeluncertainties and external disturbances In order to improvethe tracking performance of MEMS gyroscope a robustadaptive control strategy of MEMS gyroscope using neuralsliding compensator is developed The proposed controlstrategy has the following advantages
(1) An adaptive neural slidingmode control is adopted toon-line mimic the unknown model and compensatethe approximation error It incorporates RBF neuralnetwork into the adaptive sliding control system ofMEMS gyroscope to learn the approximate modelAdaptive neural sliding mode compensation schemeis proposed to deal with the model approximationin the presence of model uncertainties and externaldisturbances
(2) This paper integrates adaptive control sliding modecontrol and the nonlinear approximation of neuralnetwork control Neural controller is proposed toapproximate the unknown system model and slidingcontroller is employed to eliminate the approximationerror and attenuate the model uncertainties andexternal disturbances
(3) The proposed adaptive neural sliding controller doesnot need to establish accurate mathematical modeland has the ability to approximate the nonlinear char-acteristics of system model The proposed adaptiveneural network slidingmode controller can guaranteethe stability of the closed-loop system and improvethe robustness for external disturbances and modeluncertainties
The paper is organized as follows In Section 2 thedynamics of MEMS gyroscope is described In Section 3problem is formulated In Section 4 an adaptive RBFnetworkcompensation is derived to guarantee the asymptotic stabilityof the closed-loop system Simulation results are presented inSection 5 to verify the effectiveness of the proposed adaptiveneural compensation control Conclusions are provided inSection 6
2 Dynamics of MEMS Gyroscope
The dynamics of vibratory MEMS gyroscope is described inthis section A two-axis MEMS vibratory gyroscope mainlycontains three parts one is the sensitive element of singleproof mass (119898) suspended by spring beams another iselectrostatic actuations and sensing mechanisms for forcing
an oscillatorymotion and sensing the position and velocity ofthe sensitive element and the other is the rigid frame whichis rotated along the rotation axis
A schematic model of a two-axis MEMS vibratory gyro-scope is shown in Figure 1 As an electromechanical systemfor special use the initial and the most important step isto derive the motion equations In this section the motionequations ofMEMS gyroscope are derived based on Lagrangeequation
dd119905(
120597119871
120597119894
) minus
120597119871
120597119909119894
+
120597119865
120597119894
= 119876119894 (1)
where 119871 = 119864119870minus 119864119875
is Lagrangersquos function 119864119870
and119864119875are kinetic and potential energies of the sensitive ele-
ment respectively 119865 denote the generalized damping forces119876119894are generalized forces acting on the sensitive element
and 119894 ranges from 1 to the number of degrees of freedomunder consideration In our case it will be 2
Let us introduce the right-handed orthogonal referenceframe 119874119883119884 in which drive oscillation are excited alongthe 119909-axis and sense oscillation occurs along the 119910-axisAssume a generalized coordinate 119909 as the displacement ofthe sensitive element along the 119909-axis Similarly general-ized coordinate 119910 corresponds to the displacements of thesensitive element along the 119910-axis The arbitrary angularrate Ω is defined by its projections on the introduced abovereference frame as Ω = Ω
119909 Ω119910 Ω119911 where the third 119911-axis
is perpendicular to the paperThe total kinetic energy of the sensitive element in our
case will be
119864119870=
119898
2
[( minus 119910Ω119911)2+ ( 119910 + 119909Ω
119911)2+ (119910Ω
119909minus 119909Ω119910)
2
] (2)
Potential energy of the sensitive element is formed bystiffness of its springs and is given by
119864119875=
119896119909
2
1199092+
119896119910
2
1199102 (3)
where 119896119909is the total stiffness of the elastic suspension along
the 119909-axis and 119896119910is the total stiffness along the 119910-axis
Now using the Lagrange equation (1) the following motionequations that reveal the dynamics of MEMS gyroscope willappear after some simple transformations
119898 + 119889119909119909 + 119898 (120596
2
119909minus Ω2
119910minus Ω2
119911) 119909
minus 2119898Ω119911119910 + 119898 (Ω
119909Ω119910+ Ω119911) 119910 = 119906
119909
119898 119910 + 119889119910119910119910 + 119898 (120596
2
119910minus Ω2
119909minus Ω2
119911) 119910
+ 2119898Ω119911 + 119898 (Ω
119909Ω119910minus Ω119911) 119909 = 119906
119910
(4)
where 1205962119909= 1198961119898 and 1205962
119910= 1198962119898 are natural frequencies
of drive and sense oscillations mode respectively 119889119909119909 and
119889119910119910119910 are the damping forces terms minus119898(Ω2
119910+ Ω2
119911)119909 and
minus119898(Ω2
119909+Ω2
119911)119910 are called centripetal forces119898Ω
119911119910 and119898Ω
119911
are Euler forces 2119898Ω119911119910 and 2119898Ω
119911 are the Coriolis forces
Journal of Applied Mathematics 3
and used to reconstruct the unknown external angular rateΩ119911 119906119909and 119906
119910are external forces or control inputs
Assuming that the external angular rate is almost constantover a long enough time interval under typical assumptionsΩ119909asymp Ω119910asymp 0 only the 119911-axis component of the angular
rate Ω119911causes a dynamic coupling between the two axes
Taking fabrication imperfections into account which causeextra coupling between the two axes the motion equations ofa MEMS gyroscope is finally given by
119898 + 119889119909119909 + 119889119909119910119910 + 119896119909119909119909 + 119896119909119910119910 = 119906
119909+ 119889119909+ 2119898Ω
119911119910
119898 119910 + 119889119909119910 + 119889119910119910119910 + 119896119909119910119909 + 119896119910119910119910 = 119906
119910+ 119889119910minus 2119898Ω
119911
(5)
where 119889119909119909 119889119910119910 119896119909119909 and 119896
119910119910are damping and spring coef-
ficients 119889119909119910
and 119896119909119910 called quadrature errors are coupled
damping and spring terms respectively mainly due to theasymmetries in suspension structure and misalignment ofsensors and actuators Bounded unknown disturbances aredenoted by 119889
119909and 119889
119910 It is noted that the coupled damping
coefficient between 119909- and 119910-axis is far smaller than 119909-axisor 119910-axis own damping coefficient that is 119889
119909119910≪ 119889119909119909
and119889119909119910≪ 119889119910119910
Rewriting the gyroscope dynamics into vector formsresults in
119872q + 119863q + 119870q = 120591 minus 2Ωq + 120591119889 (6)
where q = [ 119909119910 ] 120591 = [ 119906119909119906119910] 120591119889= [119889119909
119889119910
] 119872 = [119898 0
0 119898] 119863 =
[
119889119909119909119889119909119910
119889119909119910119889119910119910
] 119870 = [ 119896119909119909 119896119909119910119896119909119910119896119910119910
] andΩ = [ 0 minus119898Ω119911119898Ω1199110]
3 Problem Formulation
All the MEMS gyroscope parameters in (6) cannot be knownprecisely This may arise because the MEMS gyroscope isbeing subjected to unknown angular rate or because theexact evaluation of the gyroscopersquos dynamic is too costlyThe dynamical model contains model uncertainties externaldisturbance and even some nonlinearities We assume theexternal disturbances are bounded that is 120591
119889 le 119887
119889 for
some unknown positive constant 119887119889
Let q119889= [119909119889 119910119889]119879 denote the desired trajectory of the
proof mass in the 119909-119910 planDefine the tracking error as follows
e (119905) = q119889 (119905) minus q (119905) (7)
The sliding mode is defined as
r (119905) = e (119905) + Λe (119905) (8)
where Λ = Λ119879gt 0 is a design parameter matrix
Differentiating r(119905) and using (6) the MEMS gyroscopedynamics can be expressed as
119872 r = minus119863r minus 120591 + f (x) minus 120591119889 (9)
where the unknown gyroscope function is
f (x) = 119872 (q119889 + Λe) + 119863 (q119889 + Λe) + 119870q + 2Ωq (10)
Supporting frame
Driving axis
Sensing axis
Y
XO
y
x
kxx
kyy
dyy
dxx
m
Ωz
Figure 1 Schematic model of a two-axis MEMS vibratory gyro-scope
and x isin R10 are the available measured signals
x = [e119879 e119879 q119879119889
q119879119889
q119879119889]
119879
(11)
If we can reconstruct an estimate of f(x) using x by somemeans not yet disclosed we now define a control input as
120591 =f (x) + 119870Vr (12)
where gain matrix 119870V = 119870119879
V gt 0 and f(x) is the estimate off(x) The closed-loop system becomes
119872 r = minus119863r minus f minus 119870Vr + f minus 120591119889
= minus (119870V + 119863) r + f minus 120591119889(13)
where the functional estimation error is given by
f = f minus f (14)
Equation (13) is an error systemwherein the slidingmodeis driven by the functional estimation error The control1205910incorporates a proportional-plus-derivative (PD) term in
119870Vr = 119870V(e+Λe) In the next section we will use (13) to focuson selectingNN tuning algorithms that guarantee the stabilityof the sliding mode r(119905)
4 Adaptive Neural Network Controller
41 RBF Neural Network RBF neural network has the uni-versal approximation property that states that any sufficientlysmooth function can be approximated by a suitable large net-work for all inputs in a compact set and the resulting functionreconstruction error is bounded The RBF network has a fastconvergence property and a simple architectureTherefore inthis section we apply RBF network for compensating for theunknown dynamics part in Section 2
4 Journal of Applied Mathematics
Inputlayer layer
layer
Hidden
Output
x1
x2
xn
w1
w2
wm
ysum
1206011
1206012
120601m
Figure 2 Architecture of RBF network
MMESgyroscope
Sliding surface Gain
NNcontroller
minus
τ
uqre
K
qd
r = + Λe
Figure 3 Adaptive NN control structure
The structure of RBF neural network is a three-layer feedforward network shown as in Figure 2 The output of an RBFneural network can be described as
119910119894=
1198992
sum
119895=1
120596119894119895120601119895 119894 = 1 2 119899
3
120601119895 (x) = 119892(
10038171003817100381710038171003817x minus c119895
10038171003817100381710038171003817
120590119895
) 119895 = 1 2 1198992
(15)
where 1198992and 1198993are the numbers of hidden and output nodes
respectively and x isin R1198991 and 120596119894119895is the weight connecting
the 119895th hidden node to the 119894th output node119910119894is the output of
the 119894th node 120601119895(x) is the 119895th radial basis function c
119895isin R1198991 is
the center vector and120590119895represents thewidth of the 119895th hidden
nodeThe activation function119892 is often chosen to beGaussianfunction 119892(120572) = exp(minus1205722)
If the RBF net parameters c119895and 120590
119895are kept fixed the
only adjustable weights 120596 appear linearly with respect to theknown nonlinearity 120601(x) Now the output of RBF NN can berewritten as
y = 119882119879120601 (x) (16)
where119882119879 = [120596119894119895] and 120601(x) = [120601
119895(x)]
120596119894119895is the weight connecting the 119895th hidden node to
the 119894th output node 120601119895(x) is the 119895th radial basis function
Following the above results the unknown MEMS gyro-scope function f(x) can be parameterized by a RBF networkwith output f(x) where is the matrix of adjustable
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus015
minus01
minus005
qdxqx
Posit
ion
trac
king
forx
-axi
s
Figure 4 Position tracking of 119909-axis with adaptive neural slidingcompensator
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus015
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 5 Position tracking of 119910-axis with adaptive neural slidingcompensator
weights We assume that the function f(x) is given by aRBF NN for some constant ldquoidealrdquo NN weights 119882 and thenet reconstruction error 120576(x) is bounded by an unknownconstant 120576
119873as
f (x) = 119882119879120601 (x) + 120576 (x) (17)
where 120576(x) as mentioned above is the NN functional recon-struction error vector For the ideal NN weights 120576(x) le 120576
119873
Meanwhile we assume that the ideal weights are boundedby
119882 le 119882119861 (18)
42 Controller Structure and Error System Dynamics Definethe NN functional estimate of (10) as
f (x) = 119879120601 (x) (19)
Journal of Applied Mathematics 5
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of x-axis
(a)
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of y-axis
(b)
Figure 6 Tracking errors with adaptive neural sliding compensator
with as the estimated values of the ideal RBF NN weights119882
Substituting (19) into (12) yields
120591 = 119882119879120601 (x) + 119870Vr (20)
The proposed NN control structure is shown in Figure 3Using this controller the sliding mode dynamics become
119872 r = minus (119870V + 119863) r + 119879120601 (x) + (120576 minus 120591119889)
= minus (119870V + 119863) r + 1205891(21)
where = 119882 minus and 1205891= 119908119879120601(x) + (120576 minus 120591
119889)
Theorem 1 Let the designed trajectory be bounded the controlinput for (6) given by (20) and weights tuning provided by
= 119865120601 (x) r119879 minus 120574119865 r (22)
with any constant gain matrix 119865 = 119865T gt 0 and scalar designparameter 120574 gt 0 Then for large enough control gain 119870V thesliding mode r(119905) and NN weight estimates are uniformlyultimate bounded Moreover the tracking error may be kept assmall as desired by increasing the gains 119870V in (20)
Proof Consider the following Lyapunov function candidate
119881 =
1
2
r119879119872r + 12
tr (T119865minus1) (23)
where tr(sdot) denotes the matrix trace operator matrix 119865 is theadaptive law gain
Differentiating (23) yields
= r119879119872 r + tr (T119865minus1 )
= minusr119879 (119870V + 119863) r + tr (119879(119865minus1 + 120601 (x) r119879))
+ r119879 (120576 minus 120591119889)
(24)
Substituting (22) in (24) and using the fact that = minus
yield the following expression
= minusr119879 (119870V + 119863) r + 120574 r tr 119879(119882 minus ) + r119879 (120576 minus 120591
119889)
(25)
Since trT(119882 minus ) = ⟨119882⟩
119865minus
2
119865le
119865119882119865minus
2
119865 (25) yields
le minus r119879119870Vr + 120574 r sdot10038171003817100381710038171003817
10038171003817100381710038171003817119865(119882119865
minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
le minus 119870Vminr2+ 120574 r sdot 1003817100381710038171003817
1003817
10038171003817100381710038171003817119865(119882119861minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
= minus r [119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865
times (
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)]
(26)
which is negative as long as the term in braces is positiveCompleting the square yields
119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)
= 120574(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus
119882119861
2
)
2
minus
1205741198822
119861
4
+ 119870Vmin r minus (120576119873 + 119887119889) (27)
which is guaranteed positive as long as
r gt1205741198822
1198614 + (120576
119873+ 119887119889)
119870Vminequiv 119887119903
(28)
or
10038171003817100381710038171003817
10038171003817100381710038171003817119865gt
119882119861
2
+ radic1205741198822
119861
4
+
120576119873+ 119887119889
120574
equiv 119887119882 (29)
Thus is negative outside a compact set this demonstratesthe UUB (uniformly ultimate bounded) of both r and119865 Since any excursions of r or
119865beyond the
bounds given in (28) and (29) respectively lead to a decreasein the Lyapunov function 119871 it follows that the right-handsides of (28) and (29) can be taken as practical bounds onr and
119865 respectively Note from (28) moreover that
arbitrarily small error bounds may be achieved by selectinglarge tracking control gains119870V
6 Journal of Applied Mathematics
Time (s)0 05 1 15 2 25 3 35 4 45 5
0
50
100
minus50
Con
trol i
nput
ofx
-axi
s
(a)
0 05 1 15 2 25 3 35 4 45 5
0
50
100
Time (s)
minus50
Con
trol i
nput
ofy
-axi
s
(b)
Figure 7 Control inputs for gyroscope with adaptive neural sliding compensator ((a) 119906119909 (b) 119906
119910)
0 1 2 3 4 5
0
20
40
60
Time (s)
minus40
minus20
EstimationActual
Appr
oxim
atio
n of
x-a
xis
Figure 8 RBF network approximation of 119909-axis component withadaptive neural sliding compensator
0 05 1 15 2 25 3 35 4 45 5
0
20
40
60
Time (s)
minus40
minus20
minus60
App
roxi
mat
ion
ofy
-axi
s
EstimationActual
Figure 9 RBF network approximation of 119910-axis component withadaptive neural sliding compensator
Remark 2 Given119860 = [119886119894119895] the Frobenius norm is defined by
1198602
119865= tr (119860119879119860) = sum1198862
119894119895 (30)
The associated inner product is ⟨119860 119861⟩119865= tr(119860119879119861) where the
dimensions of 119860 and 119861 are suitable for matrix product
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdxqx
Figure 10 Position tracking of 119909-axis without NN controller
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 11 Position tracking of 119910-axis without NN controller
5 Simulation Analysis
In this section we will evaluate the proposed adaptive neuralnetwork scheme which will require no knowledge of thedynamics not even their structure on the lumped MEMSgyroscope sensor model [3 4] The control objective is tomaintain the gyroscope system to track the desired reference
Journal of Applied Mathematics 7
0 1 2 3 4 5 6 7
0
005Tracking errors
Time (s)
minus005
minus01
Tracking error of x-axis
(a)
Tracking errors
0 1 2 3 4 5 6 7
0
005
Time (s)
minus005
minus01
Tracking error of y-axis
(b)
Figure 12 Tracking errors with neural compensator
trajectory and estimate the unknown function f(x) as in (10)The parameters of the MEMS gyroscope are shown as
119898 = 18 times 10minus7kg 119896
119909119909= 63955Nm
119896119910119910= 9592Nm 119896
119909119910= 12779Nm
119889119909119909= 18 times 10
minus6N sdot sm 119889119910119910= 18 times 10
minus6N sdot sm
119889119909119910= 36 times 10
minus7N sdot sm(31)
The unknown angular velocity is assumed Ω119911= 100 rads
The desired trajectory is defined as 119902119889119909= 01lowastcos(120596
1119905) 119902119889119910=
01 lowast cos(1205962119905) where 120596
1= 617 and 120596
2= 511
The external disturbance is 120591119889= [(sin(617 lowast 119905))2 +
cos(617 lowast 119905) (sin(511 lowast 119905))2 + cos(511 lowast 119905)]119879The gain matrix 119870V was taken as 119870V = diag50 50
sliding parameter Λ = diag5 5 The RBF neural networkis composed of 45 nodes As we will see from the subsequentfigure that the unique PD controller (119870Vr) could ensure thatthe tracking error belongs to a compact set Thus when wedesign the RBF net centroids we constrain our attention onthat compact set and take width 120590 = 1 The response withthese controller parameters when q = 0 and q = 0 is shownin the following figures
Figures 4 and 5 show the proof mass along 119909-axis and119910-axis tracking trajectories respectively Figure 6 depicts thetracking errors It can be seen that the tracking error belongsto a small region with the adaptive RBF sliding compensatorThe control inputs appear in Figure 7 As seen from thefigure the control inputs are continuous and smooth withrespect to time which implies that the proposed controller iseasy to implement Figures 8 and 9 show the approximationof RBF network to unknown MEMS gyroscope functionf(x) The approximation result is impressive because of thesatisfactory performance of the RBFNNAs shown in the twofigures RBF NN could approximate the unknown gyroscopefunction quickly using the available measured signals xthroughout the whole compact set
In order to demonstrate the contribution of RBF NN theresponse without RBF NN is also discussed and shown as inFigures 10 and 11 The responses with the controller 120591 = 119870Vrthat is with no neural network are drawn A PD controllershould give bounded errors if 119870V is large enough and the
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus015
minus01
minus005
minus02
qdxqx
x-a
xis p
ositi
on tr
acki
ng
Figure 13 119909-axis position tracking with neural compensator
tracking errors belong to a compact set It is very clear thatthe addition of the NNmakes a very significant improvementin the tracking performance
To compare the performance of the proposed controllerand the neural compensator without sliding mode methodin [16] Figures 12 13 and 14 show the response with theneural compensator under the same gyroscope parametersand disturbances introduced herein
The tracking results with neural compensator showclearly that both the convergence time and the ultimatetracking error bound are worse than the proposed neuralsliding mode controller demonstrating that adaptive slidingmode controller using neural network approximation couldimprove the dynamic and static performance
6 Conclusion
The trajectory control of the MEMS gyroscope using adap-tive NN controller is investigated A novel weight tuningalgorithm designed based on Lyapunov stability theorem isderived to establish the bounded tracking errors and NNweights which consists of a standard term plus robust signalthat provides the possibility of arbitrary small tracking errorIt is clearly observed that the MEMS gyroscope function
8 Journal of Applied Mathematics
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus01
minus015
minus02
minus005
qdyqy
y-a
xis p
ositi
on tr
acki
ng
Figure 14 119910-axis position tracking with neural compensator
f(x) can be effectively approximated by its estimate f(x)using the RBF neural network and the tracking error ofthe proof mass can be greatly improved in the presence ofmodel uncertainties and external disturbances Numericalsimulations verify the effectiveness of the proposed adaptiveNN compensation scheme to cope with all structured andunstructured uncertainties existing in the MEMS gyroscope
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank the anonymous reviewers for their usefulcomments that improved the quality of the paper This workis partially supported by National Science Foundation ofChina under Grant no 61374100 Natural Science Founda-tion of Jiangsu Province under Grant no BK20131136 theUniversity Graduate Research and Innovation Projects ofJiangsu Province under Grant no CXLX12 0235 and theFundamental Research Funds for the Central Universitiesunder Grant no 2013B24614
References
[1] R P Leland ldquoAdaptive control of a MEMS gyroscope usinglyapunov methodsrdquo IEEE Transactions on Control SystemsTechnology vol 14 no 2 pp 278ndash283 2006
[2] S Park R Horowitz S K Hong and Y Nam ldquoTrajectory-switching algorithm for aMEMS gyroscoperdquo IEEE Transactionson Instrumentation and Measurement vol 56 no 6 pp 2561ndash2569 2007
[3] C Batur T Sreeramreddy and Q Khasawneh ldquoSliding modecontrol of a simulatedMEMS gyroscoperdquo ISA Transactions vol45 no 1 pp 99ndash108 2006
[4] J Fei and C Batur ldquoA novel adaptive sliding mode control withapplication to MEMS gyroscoperdquo ISA Transactions vol 48 no1 pp 73ndash78 2009
[5] N-C Tsai and C-Y Sue ldquoIntegrated model reference adaptivecontrol and time-varying angular rate estimation for micro-machined gyroscopesrdquo International Journal of Control vol 83no 2 pp 246ndash256 2010
[6] J Raman E Cretu P Rombouts and L Weyten ldquoA closed-loop digitally controlled MEMS gyroscope with unconstrainedsigma-delta force-feedbackrdquo IEEE Sensors Journal vol 9 no 3pp 297ndash305 2009
[7] F Lewis S Jagannathan and A Yesildirek Neural NetworkControl of Robot Manipulators Taylor and Francis 1999
[8] F L Lewis K Liu and A Yesildirek ldquoNeural net robotcontroller with guaranteed tracking performancerdquo IEEE Trans-actions on Neural Networks vol 6 no 3 pp 703ndash715 1995
[9] G Feng ldquoA compensating scheme for robot tracking based onneural networksrdquo Robotics and Autonomous Systems vol 15 no3 pp 199ndash206 1995
[10] S-C Lin and Y-Y Chen ldquoRBF network-based sliding modecontrolrdquo in Proceedings of the IEEE International Conference onSystems Man and Cybernetics pp 1957ndash1961 October 1994
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] N Sadati and R Ghadami ldquoAdaptive multi-model slidingmode control of robotic manipulators using soft computingrdquoNeurocomputing vol 71 no 13ndash15 pp 2702ndash2710 2008
[13] M-J Lee and Y-K Choi ldquoAn adaptive neurocontroller usingRBFN for robot manipulatorsrdquo IEEE Transactions on IndustrialElectronics vol 51 no 3 pp 711ndash717 2004
[14] F-J Lin S-Y Chen and K-K Shyu ldquoRobust dynamic sliding-mode control using adaptive RENN for magnetic levitationsystemrdquo IEEE Transactions on Neural Networks vol 20 no 6pp 938ndash951 2009
[15] S-J Huang K-S Huang and K-C Chiou ldquoDevelopmentand application of a novel radial basis function sliding modecontrollerrdquoMechatronics vol 13 no 4 pp 313ndash329 2003
[16] J Fei and Y Yang ldquoAdaptive neural compensation scheme forrobust tracking of MEMS gyroscopesrdquo in Proceedings of IEEEConference on SMC pp 1546ndash1551 Seoul Korea 2012
[17] J Fei and M Xin ldquoAn adaptive fuzzy sliding mode controllerfor MEMS triaxial gyroscope with angular velocity estimationrdquoNonlinear Dynamics vol 24 no 1 pp 201ndash210 2012
[18] J Fei and H Ding ldquoAdaptive neural sliding mode controlof MEMS triaxial gyroscope based on feedback linearizationapproachrdquo in Proceedings of Annual Conference of SICE pp1271ndash1276 Akita Japan 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Applied Mathematics 3
and used to reconstruct the unknown external angular rateΩ119911 119906119909and 119906
119910are external forces or control inputs
Assuming that the external angular rate is almost constantover a long enough time interval under typical assumptionsΩ119909asymp Ω119910asymp 0 only the 119911-axis component of the angular
rate Ω119911causes a dynamic coupling between the two axes
Taking fabrication imperfections into account which causeextra coupling between the two axes the motion equations ofa MEMS gyroscope is finally given by
119898 + 119889119909119909 + 119889119909119910119910 + 119896119909119909119909 + 119896119909119910119910 = 119906
119909+ 119889119909+ 2119898Ω
119911119910
119898 119910 + 119889119909119910 + 119889119910119910119910 + 119896119909119910119909 + 119896119910119910119910 = 119906
119910+ 119889119910minus 2119898Ω
119911
(5)
where 119889119909119909 119889119910119910 119896119909119909 and 119896
119910119910are damping and spring coef-
ficients 119889119909119910
and 119896119909119910 called quadrature errors are coupled
damping and spring terms respectively mainly due to theasymmetries in suspension structure and misalignment ofsensors and actuators Bounded unknown disturbances aredenoted by 119889
119909and 119889
119910 It is noted that the coupled damping
coefficient between 119909- and 119910-axis is far smaller than 119909-axisor 119910-axis own damping coefficient that is 119889
119909119910≪ 119889119909119909
and119889119909119910≪ 119889119910119910
Rewriting the gyroscope dynamics into vector formsresults in
119872q + 119863q + 119870q = 120591 minus 2Ωq + 120591119889 (6)
where q = [ 119909119910 ] 120591 = [ 119906119909119906119910] 120591119889= [119889119909
119889119910
] 119872 = [119898 0
0 119898] 119863 =
[
119889119909119909119889119909119910
119889119909119910119889119910119910
] 119870 = [ 119896119909119909 119896119909119910119896119909119910119896119910119910
] andΩ = [ 0 minus119898Ω119911119898Ω1199110]
3 Problem Formulation
All the MEMS gyroscope parameters in (6) cannot be knownprecisely This may arise because the MEMS gyroscope isbeing subjected to unknown angular rate or because theexact evaluation of the gyroscopersquos dynamic is too costlyThe dynamical model contains model uncertainties externaldisturbance and even some nonlinearities We assume theexternal disturbances are bounded that is 120591
119889 le 119887
119889 for
some unknown positive constant 119887119889
Let q119889= [119909119889 119910119889]119879 denote the desired trajectory of the
proof mass in the 119909-119910 planDefine the tracking error as follows
e (119905) = q119889 (119905) minus q (119905) (7)
The sliding mode is defined as
r (119905) = e (119905) + Λe (119905) (8)
where Λ = Λ119879gt 0 is a design parameter matrix
Differentiating r(119905) and using (6) the MEMS gyroscopedynamics can be expressed as
119872 r = minus119863r minus 120591 + f (x) minus 120591119889 (9)
where the unknown gyroscope function is
f (x) = 119872 (q119889 + Λe) + 119863 (q119889 + Λe) + 119870q + 2Ωq (10)
Supporting frame
Driving axis
Sensing axis
Y
XO
y
x
kxx
kyy
dyy
dxx
m
Ωz
Figure 1 Schematic model of a two-axis MEMS vibratory gyro-scope
and x isin R10 are the available measured signals
x = [e119879 e119879 q119879119889
q119879119889
q119879119889]
119879
(11)
If we can reconstruct an estimate of f(x) using x by somemeans not yet disclosed we now define a control input as
120591 =f (x) + 119870Vr (12)
where gain matrix 119870V = 119870119879
V gt 0 and f(x) is the estimate off(x) The closed-loop system becomes
119872 r = minus119863r minus f minus 119870Vr + f minus 120591119889
= minus (119870V + 119863) r + f minus 120591119889(13)
where the functional estimation error is given by
f = f minus f (14)
Equation (13) is an error systemwherein the slidingmodeis driven by the functional estimation error The control1205910incorporates a proportional-plus-derivative (PD) term in
119870Vr = 119870V(e+Λe) In the next section we will use (13) to focuson selectingNN tuning algorithms that guarantee the stabilityof the sliding mode r(119905)
4 Adaptive Neural Network Controller
41 RBF Neural Network RBF neural network has the uni-versal approximation property that states that any sufficientlysmooth function can be approximated by a suitable large net-work for all inputs in a compact set and the resulting functionreconstruction error is bounded The RBF network has a fastconvergence property and a simple architectureTherefore inthis section we apply RBF network for compensating for theunknown dynamics part in Section 2
4 Journal of Applied Mathematics
Inputlayer layer
layer
Hidden
Output
x1
x2
xn
w1
w2
wm
ysum
1206011
1206012
120601m
Figure 2 Architecture of RBF network
MMESgyroscope
Sliding surface Gain
NNcontroller
minus
τ
uqre
K
qd
r = + Λe
Figure 3 Adaptive NN control structure
The structure of RBF neural network is a three-layer feedforward network shown as in Figure 2 The output of an RBFneural network can be described as
119910119894=
1198992
sum
119895=1
120596119894119895120601119895 119894 = 1 2 119899
3
120601119895 (x) = 119892(
10038171003817100381710038171003817x minus c119895
10038171003817100381710038171003817
120590119895
) 119895 = 1 2 1198992
(15)
where 1198992and 1198993are the numbers of hidden and output nodes
respectively and x isin R1198991 and 120596119894119895is the weight connecting
the 119895th hidden node to the 119894th output node119910119894is the output of
the 119894th node 120601119895(x) is the 119895th radial basis function c
119895isin R1198991 is
the center vector and120590119895represents thewidth of the 119895th hidden
nodeThe activation function119892 is often chosen to beGaussianfunction 119892(120572) = exp(minus1205722)
If the RBF net parameters c119895and 120590
119895are kept fixed the
only adjustable weights 120596 appear linearly with respect to theknown nonlinearity 120601(x) Now the output of RBF NN can berewritten as
y = 119882119879120601 (x) (16)
where119882119879 = [120596119894119895] and 120601(x) = [120601
119895(x)]
120596119894119895is the weight connecting the 119895th hidden node to
the 119894th output node 120601119895(x) is the 119895th radial basis function
Following the above results the unknown MEMS gyro-scope function f(x) can be parameterized by a RBF networkwith output f(x) where is the matrix of adjustable
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus015
minus01
minus005
qdxqx
Posit
ion
trac
king
forx
-axi
s
Figure 4 Position tracking of 119909-axis with adaptive neural slidingcompensator
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus015
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 5 Position tracking of 119910-axis with adaptive neural slidingcompensator
weights We assume that the function f(x) is given by aRBF NN for some constant ldquoidealrdquo NN weights 119882 and thenet reconstruction error 120576(x) is bounded by an unknownconstant 120576
119873as
f (x) = 119882119879120601 (x) + 120576 (x) (17)
where 120576(x) as mentioned above is the NN functional recon-struction error vector For the ideal NN weights 120576(x) le 120576
119873
Meanwhile we assume that the ideal weights are boundedby
119882 le 119882119861 (18)
42 Controller Structure and Error System Dynamics Definethe NN functional estimate of (10) as
f (x) = 119879120601 (x) (19)
Journal of Applied Mathematics 5
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of x-axis
(a)
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of y-axis
(b)
Figure 6 Tracking errors with adaptive neural sliding compensator
with as the estimated values of the ideal RBF NN weights119882
Substituting (19) into (12) yields
120591 = 119882119879120601 (x) + 119870Vr (20)
The proposed NN control structure is shown in Figure 3Using this controller the sliding mode dynamics become
119872 r = minus (119870V + 119863) r + 119879120601 (x) + (120576 minus 120591119889)
= minus (119870V + 119863) r + 1205891(21)
where = 119882 minus and 1205891= 119908119879120601(x) + (120576 minus 120591
119889)
Theorem 1 Let the designed trajectory be bounded the controlinput for (6) given by (20) and weights tuning provided by
= 119865120601 (x) r119879 minus 120574119865 r (22)
with any constant gain matrix 119865 = 119865T gt 0 and scalar designparameter 120574 gt 0 Then for large enough control gain 119870V thesliding mode r(119905) and NN weight estimates are uniformlyultimate bounded Moreover the tracking error may be kept assmall as desired by increasing the gains 119870V in (20)
Proof Consider the following Lyapunov function candidate
119881 =
1
2
r119879119872r + 12
tr (T119865minus1) (23)
where tr(sdot) denotes the matrix trace operator matrix 119865 is theadaptive law gain
Differentiating (23) yields
= r119879119872 r + tr (T119865minus1 )
= minusr119879 (119870V + 119863) r + tr (119879(119865minus1 + 120601 (x) r119879))
+ r119879 (120576 minus 120591119889)
(24)
Substituting (22) in (24) and using the fact that = minus
yield the following expression
= minusr119879 (119870V + 119863) r + 120574 r tr 119879(119882 minus ) + r119879 (120576 minus 120591
119889)
(25)
Since trT(119882 minus ) = ⟨119882⟩
119865minus
2
119865le
119865119882119865minus
2
119865 (25) yields
le minus r119879119870Vr + 120574 r sdot10038171003817100381710038171003817
10038171003817100381710038171003817119865(119882119865
minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
le minus 119870Vminr2+ 120574 r sdot 1003817100381710038171003817
1003817
10038171003817100381710038171003817119865(119882119861minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
= minus r [119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865
times (
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)]
(26)
which is negative as long as the term in braces is positiveCompleting the square yields
119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)
= 120574(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus
119882119861
2
)
2
minus
1205741198822
119861
4
+ 119870Vmin r minus (120576119873 + 119887119889) (27)
which is guaranteed positive as long as
r gt1205741198822
1198614 + (120576
119873+ 119887119889)
119870Vminequiv 119887119903
(28)
or
10038171003817100381710038171003817
10038171003817100381710038171003817119865gt
119882119861
2
+ radic1205741198822
119861
4
+
120576119873+ 119887119889
120574
equiv 119887119882 (29)
Thus is negative outside a compact set this demonstratesthe UUB (uniformly ultimate bounded) of both r and119865 Since any excursions of r or
119865beyond the
bounds given in (28) and (29) respectively lead to a decreasein the Lyapunov function 119871 it follows that the right-handsides of (28) and (29) can be taken as practical bounds onr and
119865 respectively Note from (28) moreover that
arbitrarily small error bounds may be achieved by selectinglarge tracking control gains119870V
6 Journal of Applied Mathematics
Time (s)0 05 1 15 2 25 3 35 4 45 5
0
50
100
minus50
Con
trol i
nput
ofx
-axi
s
(a)
0 05 1 15 2 25 3 35 4 45 5
0
50
100
Time (s)
minus50
Con
trol i
nput
ofy
-axi
s
(b)
Figure 7 Control inputs for gyroscope with adaptive neural sliding compensator ((a) 119906119909 (b) 119906
119910)
0 1 2 3 4 5
0
20
40
60
Time (s)
minus40
minus20
EstimationActual
Appr
oxim
atio
n of
x-a
xis
Figure 8 RBF network approximation of 119909-axis component withadaptive neural sliding compensator
0 05 1 15 2 25 3 35 4 45 5
0
20
40
60
Time (s)
minus40
minus20
minus60
App
roxi
mat
ion
ofy
-axi
s
EstimationActual
Figure 9 RBF network approximation of 119910-axis component withadaptive neural sliding compensator
Remark 2 Given119860 = [119886119894119895] the Frobenius norm is defined by
1198602
119865= tr (119860119879119860) = sum1198862
119894119895 (30)
The associated inner product is ⟨119860 119861⟩119865= tr(119860119879119861) where the
dimensions of 119860 and 119861 are suitable for matrix product
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdxqx
Figure 10 Position tracking of 119909-axis without NN controller
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 11 Position tracking of 119910-axis without NN controller
5 Simulation Analysis
In this section we will evaluate the proposed adaptive neuralnetwork scheme which will require no knowledge of thedynamics not even their structure on the lumped MEMSgyroscope sensor model [3 4] The control objective is tomaintain the gyroscope system to track the desired reference
Journal of Applied Mathematics 7
0 1 2 3 4 5 6 7
0
005Tracking errors
Time (s)
minus005
minus01
Tracking error of x-axis
(a)
Tracking errors
0 1 2 3 4 5 6 7
0
005
Time (s)
minus005
minus01
Tracking error of y-axis
(b)
Figure 12 Tracking errors with neural compensator
trajectory and estimate the unknown function f(x) as in (10)The parameters of the MEMS gyroscope are shown as
119898 = 18 times 10minus7kg 119896
119909119909= 63955Nm
119896119910119910= 9592Nm 119896
119909119910= 12779Nm
119889119909119909= 18 times 10
minus6N sdot sm 119889119910119910= 18 times 10
minus6N sdot sm
119889119909119910= 36 times 10
minus7N sdot sm(31)
The unknown angular velocity is assumed Ω119911= 100 rads
The desired trajectory is defined as 119902119889119909= 01lowastcos(120596
1119905) 119902119889119910=
01 lowast cos(1205962119905) where 120596
1= 617 and 120596
2= 511
The external disturbance is 120591119889= [(sin(617 lowast 119905))2 +
cos(617 lowast 119905) (sin(511 lowast 119905))2 + cos(511 lowast 119905)]119879The gain matrix 119870V was taken as 119870V = diag50 50
sliding parameter Λ = diag5 5 The RBF neural networkis composed of 45 nodes As we will see from the subsequentfigure that the unique PD controller (119870Vr) could ensure thatthe tracking error belongs to a compact set Thus when wedesign the RBF net centroids we constrain our attention onthat compact set and take width 120590 = 1 The response withthese controller parameters when q = 0 and q = 0 is shownin the following figures
Figures 4 and 5 show the proof mass along 119909-axis and119910-axis tracking trajectories respectively Figure 6 depicts thetracking errors It can be seen that the tracking error belongsto a small region with the adaptive RBF sliding compensatorThe control inputs appear in Figure 7 As seen from thefigure the control inputs are continuous and smooth withrespect to time which implies that the proposed controller iseasy to implement Figures 8 and 9 show the approximationof RBF network to unknown MEMS gyroscope functionf(x) The approximation result is impressive because of thesatisfactory performance of the RBFNNAs shown in the twofigures RBF NN could approximate the unknown gyroscopefunction quickly using the available measured signals xthroughout the whole compact set
In order to demonstrate the contribution of RBF NN theresponse without RBF NN is also discussed and shown as inFigures 10 and 11 The responses with the controller 120591 = 119870Vrthat is with no neural network are drawn A PD controllershould give bounded errors if 119870V is large enough and the
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus015
minus01
minus005
minus02
qdxqx
x-a
xis p
ositi
on tr
acki
ng
Figure 13 119909-axis position tracking with neural compensator
tracking errors belong to a compact set It is very clear thatthe addition of the NNmakes a very significant improvementin the tracking performance
To compare the performance of the proposed controllerand the neural compensator without sliding mode methodin [16] Figures 12 13 and 14 show the response with theneural compensator under the same gyroscope parametersand disturbances introduced herein
The tracking results with neural compensator showclearly that both the convergence time and the ultimatetracking error bound are worse than the proposed neuralsliding mode controller demonstrating that adaptive slidingmode controller using neural network approximation couldimprove the dynamic and static performance
6 Conclusion
The trajectory control of the MEMS gyroscope using adap-tive NN controller is investigated A novel weight tuningalgorithm designed based on Lyapunov stability theorem isderived to establish the bounded tracking errors and NNweights which consists of a standard term plus robust signalthat provides the possibility of arbitrary small tracking errorIt is clearly observed that the MEMS gyroscope function
8 Journal of Applied Mathematics
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus01
minus015
minus02
minus005
qdyqy
y-a
xis p
ositi
on tr
acki
ng
Figure 14 119910-axis position tracking with neural compensator
f(x) can be effectively approximated by its estimate f(x)using the RBF neural network and the tracking error ofthe proof mass can be greatly improved in the presence ofmodel uncertainties and external disturbances Numericalsimulations verify the effectiveness of the proposed adaptiveNN compensation scheme to cope with all structured andunstructured uncertainties existing in the MEMS gyroscope
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank the anonymous reviewers for their usefulcomments that improved the quality of the paper This workis partially supported by National Science Foundation ofChina under Grant no 61374100 Natural Science Founda-tion of Jiangsu Province under Grant no BK20131136 theUniversity Graduate Research and Innovation Projects ofJiangsu Province under Grant no CXLX12 0235 and theFundamental Research Funds for the Central Universitiesunder Grant no 2013B24614
References
[1] R P Leland ldquoAdaptive control of a MEMS gyroscope usinglyapunov methodsrdquo IEEE Transactions on Control SystemsTechnology vol 14 no 2 pp 278ndash283 2006
[2] S Park R Horowitz S K Hong and Y Nam ldquoTrajectory-switching algorithm for aMEMS gyroscoperdquo IEEE Transactionson Instrumentation and Measurement vol 56 no 6 pp 2561ndash2569 2007
[3] C Batur T Sreeramreddy and Q Khasawneh ldquoSliding modecontrol of a simulatedMEMS gyroscoperdquo ISA Transactions vol45 no 1 pp 99ndash108 2006
[4] J Fei and C Batur ldquoA novel adaptive sliding mode control withapplication to MEMS gyroscoperdquo ISA Transactions vol 48 no1 pp 73ndash78 2009
[5] N-C Tsai and C-Y Sue ldquoIntegrated model reference adaptivecontrol and time-varying angular rate estimation for micro-machined gyroscopesrdquo International Journal of Control vol 83no 2 pp 246ndash256 2010
[6] J Raman E Cretu P Rombouts and L Weyten ldquoA closed-loop digitally controlled MEMS gyroscope with unconstrainedsigma-delta force-feedbackrdquo IEEE Sensors Journal vol 9 no 3pp 297ndash305 2009
[7] F Lewis S Jagannathan and A Yesildirek Neural NetworkControl of Robot Manipulators Taylor and Francis 1999
[8] F L Lewis K Liu and A Yesildirek ldquoNeural net robotcontroller with guaranteed tracking performancerdquo IEEE Trans-actions on Neural Networks vol 6 no 3 pp 703ndash715 1995
[9] G Feng ldquoA compensating scheme for robot tracking based onneural networksrdquo Robotics and Autonomous Systems vol 15 no3 pp 199ndash206 1995
[10] S-C Lin and Y-Y Chen ldquoRBF network-based sliding modecontrolrdquo in Proceedings of the IEEE International Conference onSystems Man and Cybernetics pp 1957ndash1961 October 1994
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] N Sadati and R Ghadami ldquoAdaptive multi-model slidingmode control of robotic manipulators using soft computingrdquoNeurocomputing vol 71 no 13ndash15 pp 2702ndash2710 2008
[13] M-J Lee and Y-K Choi ldquoAn adaptive neurocontroller usingRBFN for robot manipulatorsrdquo IEEE Transactions on IndustrialElectronics vol 51 no 3 pp 711ndash717 2004
[14] F-J Lin S-Y Chen and K-K Shyu ldquoRobust dynamic sliding-mode control using adaptive RENN for magnetic levitationsystemrdquo IEEE Transactions on Neural Networks vol 20 no 6pp 938ndash951 2009
[15] S-J Huang K-S Huang and K-C Chiou ldquoDevelopmentand application of a novel radial basis function sliding modecontrollerrdquoMechatronics vol 13 no 4 pp 313ndash329 2003
[16] J Fei and Y Yang ldquoAdaptive neural compensation scheme forrobust tracking of MEMS gyroscopesrdquo in Proceedings of IEEEConference on SMC pp 1546ndash1551 Seoul Korea 2012
[17] J Fei and M Xin ldquoAn adaptive fuzzy sliding mode controllerfor MEMS triaxial gyroscope with angular velocity estimationrdquoNonlinear Dynamics vol 24 no 1 pp 201ndash210 2012
[18] J Fei and H Ding ldquoAdaptive neural sliding mode controlof MEMS triaxial gyroscope based on feedback linearizationapproachrdquo in Proceedings of Annual Conference of SICE pp1271ndash1276 Akita Japan 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Journal of Applied Mathematics
Inputlayer layer
layer
Hidden
Output
x1
x2
xn
w1
w2
wm
ysum
1206011
1206012
120601m
Figure 2 Architecture of RBF network
MMESgyroscope
Sliding surface Gain
NNcontroller
minus
τ
uqre
K
qd
r = + Λe
Figure 3 Adaptive NN control structure
The structure of RBF neural network is a three-layer feedforward network shown as in Figure 2 The output of an RBFneural network can be described as
119910119894=
1198992
sum
119895=1
120596119894119895120601119895 119894 = 1 2 119899
3
120601119895 (x) = 119892(
10038171003817100381710038171003817x minus c119895
10038171003817100381710038171003817
120590119895
) 119895 = 1 2 1198992
(15)
where 1198992and 1198993are the numbers of hidden and output nodes
respectively and x isin R1198991 and 120596119894119895is the weight connecting
the 119895th hidden node to the 119894th output node119910119894is the output of
the 119894th node 120601119895(x) is the 119895th radial basis function c
119895isin R1198991 is
the center vector and120590119895represents thewidth of the 119895th hidden
nodeThe activation function119892 is often chosen to beGaussianfunction 119892(120572) = exp(minus1205722)
If the RBF net parameters c119895and 120590
119895are kept fixed the
only adjustable weights 120596 appear linearly with respect to theknown nonlinearity 120601(x) Now the output of RBF NN can berewritten as
y = 119882119879120601 (x) (16)
where119882119879 = [120596119894119895] and 120601(x) = [120601
119895(x)]
120596119894119895is the weight connecting the 119895th hidden node to
the 119894th output node 120601119895(x) is the 119895th radial basis function
Following the above results the unknown MEMS gyro-scope function f(x) can be parameterized by a RBF networkwith output f(x) where is the matrix of adjustable
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus015
minus01
minus005
qdxqx
Posit
ion
trac
king
forx
-axi
s
Figure 4 Position tracking of 119909-axis with adaptive neural slidingcompensator
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus015
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 5 Position tracking of 119910-axis with adaptive neural slidingcompensator
weights We assume that the function f(x) is given by aRBF NN for some constant ldquoidealrdquo NN weights 119882 and thenet reconstruction error 120576(x) is bounded by an unknownconstant 120576
119873as
f (x) = 119882119879120601 (x) + 120576 (x) (17)
where 120576(x) as mentioned above is the NN functional recon-struction error vector For the ideal NN weights 120576(x) le 120576
119873
Meanwhile we assume that the ideal weights are boundedby
119882 le 119882119861 (18)
42 Controller Structure and Error System Dynamics Definethe NN functional estimate of (10) as
f (x) = 119879120601 (x) (19)
Journal of Applied Mathematics 5
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of x-axis
(a)
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of y-axis
(b)
Figure 6 Tracking errors with adaptive neural sliding compensator
with as the estimated values of the ideal RBF NN weights119882
Substituting (19) into (12) yields
120591 = 119882119879120601 (x) + 119870Vr (20)
The proposed NN control structure is shown in Figure 3Using this controller the sliding mode dynamics become
119872 r = minus (119870V + 119863) r + 119879120601 (x) + (120576 minus 120591119889)
= minus (119870V + 119863) r + 1205891(21)
where = 119882 minus and 1205891= 119908119879120601(x) + (120576 minus 120591
119889)
Theorem 1 Let the designed trajectory be bounded the controlinput for (6) given by (20) and weights tuning provided by
= 119865120601 (x) r119879 minus 120574119865 r (22)
with any constant gain matrix 119865 = 119865T gt 0 and scalar designparameter 120574 gt 0 Then for large enough control gain 119870V thesliding mode r(119905) and NN weight estimates are uniformlyultimate bounded Moreover the tracking error may be kept assmall as desired by increasing the gains 119870V in (20)
Proof Consider the following Lyapunov function candidate
119881 =
1
2
r119879119872r + 12
tr (T119865minus1) (23)
where tr(sdot) denotes the matrix trace operator matrix 119865 is theadaptive law gain
Differentiating (23) yields
= r119879119872 r + tr (T119865minus1 )
= minusr119879 (119870V + 119863) r + tr (119879(119865minus1 + 120601 (x) r119879))
+ r119879 (120576 minus 120591119889)
(24)
Substituting (22) in (24) and using the fact that = minus
yield the following expression
= minusr119879 (119870V + 119863) r + 120574 r tr 119879(119882 minus ) + r119879 (120576 minus 120591
119889)
(25)
Since trT(119882 minus ) = ⟨119882⟩
119865minus
2
119865le
119865119882119865minus
2
119865 (25) yields
le minus r119879119870Vr + 120574 r sdot10038171003817100381710038171003817
10038171003817100381710038171003817119865(119882119865
minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
le minus 119870Vminr2+ 120574 r sdot 1003817100381710038171003817
1003817
10038171003817100381710038171003817119865(119882119861minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
= minus r [119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865
times (
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)]
(26)
which is negative as long as the term in braces is positiveCompleting the square yields
119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)
= 120574(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus
119882119861
2
)
2
minus
1205741198822
119861
4
+ 119870Vmin r minus (120576119873 + 119887119889) (27)
which is guaranteed positive as long as
r gt1205741198822
1198614 + (120576
119873+ 119887119889)
119870Vminequiv 119887119903
(28)
or
10038171003817100381710038171003817
10038171003817100381710038171003817119865gt
119882119861
2
+ radic1205741198822
119861
4
+
120576119873+ 119887119889
120574
equiv 119887119882 (29)
Thus is negative outside a compact set this demonstratesthe UUB (uniformly ultimate bounded) of both r and119865 Since any excursions of r or
119865beyond the
bounds given in (28) and (29) respectively lead to a decreasein the Lyapunov function 119871 it follows that the right-handsides of (28) and (29) can be taken as practical bounds onr and
119865 respectively Note from (28) moreover that
arbitrarily small error bounds may be achieved by selectinglarge tracking control gains119870V
6 Journal of Applied Mathematics
Time (s)0 05 1 15 2 25 3 35 4 45 5
0
50
100
minus50
Con
trol i
nput
ofx
-axi
s
(a)
0 05 1 15 2 25 3 35 4 45 5
0
50
100
Time (s)
minus50
Con
trol i
nput
ofy
-axi
s
(b)
Figure 7 Control inputs for gyroscope with adaptive neural sliding compensator ((a) 119906119909 (b) 119906
119910)
0 1 2 3 4 5
0
20
40
60
Time (s)
minus40
minus20
EstimationActual
Appr
oxim
atio
n of
x-a
xis
Figure 8 RBF network approximation of 119909-axis component withadaptive neural sliding compensator
0 05 1 15 2 25 3 35 4 45 5
0
20
40
60
Time (s)
minus40
minus20
minus60
App
roxi
mat
ion
ofy
-axi
s
EstimationActual
Figure 9 RBF network approximation of 119910-axis component withadaptive neural sliding compensator
Remark 2 Given119860 = [119886119894119895] the Frobenius norm is defined by
1198602
119865= tr (119860119879119860) = sum1198862
119894119895 (30)
The associated inner product is ⟨119860 119861⟩119865= tr(119860119879119861) where the
dimensions of 119860 and 119861 are suitable for matrix product
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdxqx
Figure 10 Position tracking of 119909-axis without NN controller
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 11 Position tracking of 119910-axis without NN controller
5 Simulation Analysis
In this section we will evaluate the proposed adaptive neuralnetwork scheme which will require no knowledge of thedynamics not even their structure on the lumped MEMSgyroscope sensor model [3 4] The control objective is tomaintain the gyroscope system to track the desired reference
Journal of Applied Mathematics 7
0 1 2 3 4 5 6 7
0
005Tracking errors
Time (s)
minus005
minus01
Tracking error of x-axis
(a)
Tracking errors
0 1 2 3 4 5 6 7
0
005
Time (s)
minus005
minus01
Tracking error of y-axis
(b)
Figure 12 Tracking errors with neural compensator
trajectory and estimate the unknown function f(x) as in (10)The parameters of the MEMS gyroscope are shown as
119898 = 18 times 10minus7kg 119896
119909119909= 63955Nm
119896119910119910= 9592Nm 119896
119909119910= 12779Nm
119889119909119909= 18 times 10
minus6N sdot sm 119889119910119910= 18 times 10
minus6N sdot sm
119889119909119910= 36 times 10
minus7N sdot sm(31)
The unknown angular velocity is assumed Ω119911= 100 rads
The desired trajectory is defined as 119902119889119909= 01lowastcos(120596
1119905) 119902119889119910=
01 lowast cos(1205962119905) where 120596
1= 617 and 120596
2= 511
The external disturbance is 120591119889= [(sin(617 lowast 119905))2 +
cos(617 lowast 119905) (sin(511 lowast 119905))2 + cos(511 lowast 119905)]119879The gain matrix 119870V was taken as 119870V = diag50 50
sliding parameter Λ = diag5 5 The RBF neural networkis composed of 45 nodes As we will see from the subsequentfigure that the unique PD controller (119870Vr) could ensure thatthe tracking error belongs to a compact set Thus when wedesign the RBF net centroids we constrain our attention onthat compact set and take width 120590 = 1 The response withthese controller parameters when q = 0 and q = 0 is shownin the following figures
Figures 4 and 5 show the proof mass along 119909-axis and119910-axis tracking trajectories respectively Figure 6 depicts thetracking errors It can be seen that the tracking error belongsto a small region with the adaptive RBF sliding compensatorThe control inputs appear in Figure 7 As seen from thefigure the control inputs are continuous and smooth withrespect to time which implies that the proposed controller iseasy to implement Figures 8 and 9 show the approximationof RBF network to unknown MEMS gyroscope functionf(x) The approximation result is impressive because of thesatisfactory performance of the RBFNNAs shown in the twofigures RBF NN could approximate the unknown gyroscopefunction quickly using the available measured signals xthroughout the whole compact set
In order to demonstrate the contribution of RBF NN theresponse without RBF NN is also discussed and shown as inFigures 10 and 11 The responses with the controller 120591 = 119870Vrthat is with no neural network are drawn A PD controllershould give bounded errors if 119870V is large enough and the
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus015
minus01
minus005
minus02
qdxqx
x-a
xis p
ositi
on tr
acki
ng
Figure 13 119909-axis position tracking with neural compensator
tracking errors belong to a compact set It is very clear thatthe addition of the NNmakes a very significant improvementin the tracking performance
To compare the performance of the proposed controllerand the neural compensator without sliding mode methodin [16] Figures 12 13 and 14 show the response with theneural compensator under the same gyroscope parametersand disturbances introduced herein
The tracking results with neural compensator showclearly that both the convergence time and the ultimatetracking error bound are worse than the proposed neuralsliding mode controller demonstrating that adaptive slidingmode controller using neural network approximation couldimprove the dynamic and static performance
6 Conclusion
The trajectory control of the MEMS gyroscope using adap-tive NN controller is investigated A novel weight tuningalgorithm designed based on Lyapunov stability theorem isderived to establish the bounded tracking errors and NNweights which consists of a standard term plus robust signalthat provides the possibility of arbitrary small tracking errorIt is clearly observed that the MEMS gyroscope function
8 Journal of Applied Mathematics
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus01
minus015
minus02
minus005
qdyqy
y-a
xis p
ositi
on tr
acki
ng
Figure 14 119910-axis position tracking with neural compensator
f(x) can be effectively approximated by its estimate f(x)using the RBF neural network and the tracking error ofthe proof mass can be greatly improved in the presence ofmodel uncertainties and external disturbances Numericalsimulations verify the effectiveness of the proposed adaptiveNN compensation scheme to cope with all structured andunstructured uncertainties existing in the MEMS gyroscope
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank the anonymous reviewers for their usefulcomments that improved the quality of the paper This workis partially supported by National Science Foundation ofChina under Grant no 61374100 Natural Science Founda-tion of Jiangsu Province under Grant no BK20131136 theUniversity Graduate Research and Innovation Projects ofJiangsu Province under Grant no CXLX12 0235 and theFundamental Research Funds for the Central Universitiesunder Grant no 2013B24614
References
[1] R P Leland ldquoAdaptive control of a MEMS gyroscope usinglyapunov methodsrdquo IEEE Transactions on Control SystemsTechnology vol 14 no 2 pp 278ndash283 2006
[2] S Park R Horowitz S K Hong and Y Nam ldquoTrajectory-switching algorithm for aMEMS gyroscoperdquo IEEE Transactionson Instrumentation and Measurement vol 56 no 6 pp 2561ndash2569 2007
[3] C Batur T Sreeramreddy and Q Khasawneh ldquoSliding modecontrol of a simulatedMEMS gyroscoperdquo ISA Transactions vol45 no 1 pp 99ndash108 2006
[4] J Fei and C Batur ldquoA novel adaptive sliding mode control withapplication to MEMS gyroscoperdquo ISA Transactions vol 48 no1 pp 73ndash78 2009
[5] N-C Tsai and C-Y Sue ldquoIntegrated model reference adaptivecontrol and time-varying angular rate estimation for micro-machined gyroscopesrdquo International Journal of Control vol 83no 2 pp 246ndash256 2010
[6] J Raman E Cretu P Rombouts and L Weyten ldquoA closed-loop digitally controlled MEMS gyroscope with unconstrainedsigma-delta force-feedbackrdquo IEEE Sensors Journal vol 9 no 3pp 297ndash305 2009
[7] F Lewis S Jagannathan and A Yesildirek Neural NetworkControl of Robot Manipulators Taylor and Francis 1999
[8] F L Lewis K Liu and A Yesildirek ldquoNeural net robotcontroller with guaranteed tracking performancerdquo IEEE Trans-actions on Neural Networks vol 6 no 3 pp 703ndash715 1995
[9] G Feng ldquoA compensating scheme for robot tracking based onneural networksrdquo Robotics and Autonomous Systems vol 15 no3 pp 199ndash206 1995
[10] S-C Lin and Y-Y Chen ldquoRBF network-based sliding modecontrolrdquo in Proceedings of the IEEE International Conference onSystems Man and Cybernetics pp 1957ndash1961 October 1994
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] N Sadati and R Ghadami ldquoAdaptive multi-model slidingmode control of robotic manipulators using soft computingrdquoNeurocomputing vol 71 no 13ndash15 pp 2702ndash2710 2008
[13] M-J Lee and Y-K Choi ldquoAn adaptive neurocontroller usingRBFN for robot manipulatorsrdquo IEEE Transactions on IndustrialElectronics vol 51 no 3 pp 711ndash717 2004
[14] F-J Lin S-Y Chen and K-K Shyu ldquoRobust dynamic sliding-mode control using adaptive RENN for magnetic levitationsystemrdquo IEEE Transactions on Neural Networks vol 20 no 6pp 938ndash951 2009
[15] S-J Huang K-S Huang and K-C Chiou ldquoDevelopmentand application of a novel radial basis function sliding modecontrollerrdquoMechatronics vol 13 no 4 pp 313ndash329 2003
[16] J Fei and Y Yang ldquoAdaptive neural compensation scheme forrobust tracking of MEMS gyroscopesrdquo in Proceedings of IEEEConference on SMC pp 1546ndash1551 Seoul Korea 2012
[17] J Fei and M Xin ldquoAn adaptive fuzzy sliding mode controllerfor MEMS triaxial gyroscope with angular velocity estimationrdquoNonlinear Dynamics vol 24 no 1 pp 201ndash210 2012
[18] J Fei and H Ding ldquoAdaptive neural sliding mode controlof MEMS triaxial gyroscope based on feedback linearizationapproachrdquo in Proceedings of Annual Conference of SICE pp1271ndash1276 Akita Japan 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
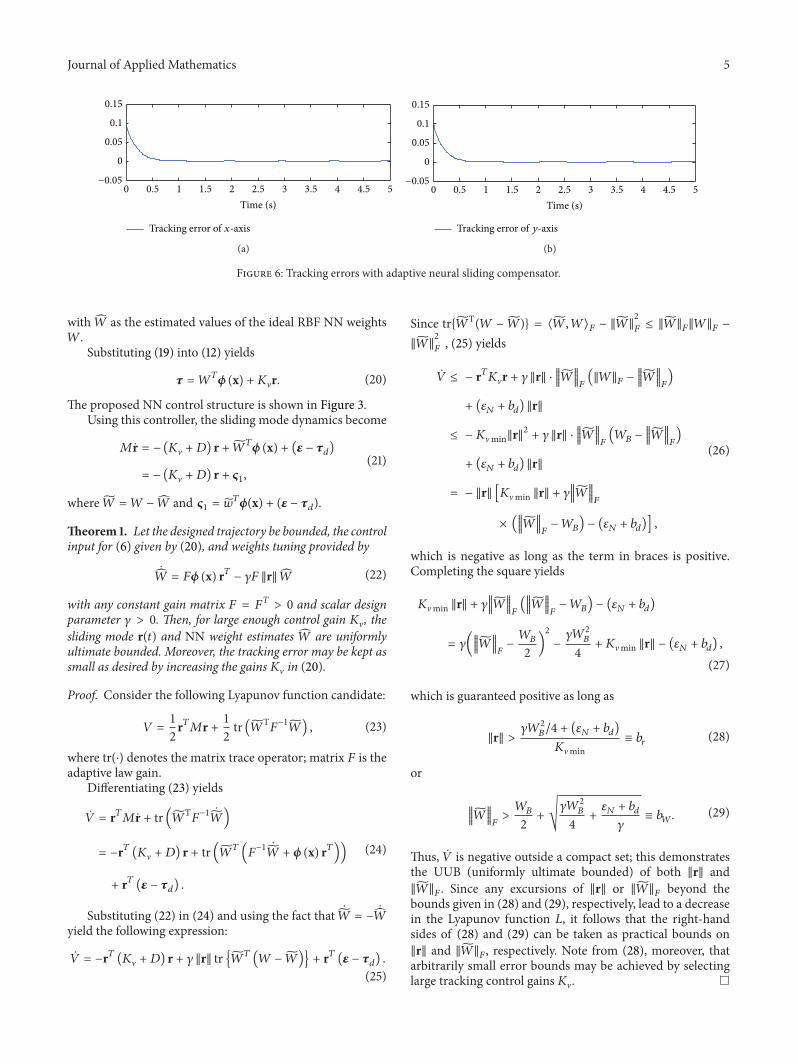
Journal of Applied Mathematics 5
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of x-axis
(a)
0 05 1 15 2 25 3 35 4 45 5
0
005
01
015
Time (s)
minus005
Tracking error of y-axis
(b)
Figure 6 Tracking errors with adaptive neural sliding compensator
with as the estimated values of the ideal RBF NN weights119882
Substituting (19) into (12) yields
120591 = 119882119879120601 (x) + 119870Vr (20)
The proposed NN control structure is shown in Figure 3Using this controller the sliding mode dynamics become
119872 r = minus (119870V + 119863) r + 119879120601 (x) + (120576 minus 120591119889)
= minus (119870V + 119863) r + 1205891(21)
where = 119882 minus and 1205891= 119908119879120601(x) + (120576 minus 120591
119889)
Theorem 1 Let the designed trajectory be bounded the controlinput for (6) given by (20) and weights tuning provided by
= 119865120601 (x) r119879 minus 120574119865 r (22)
with any constant gain matrix 119865 = 119865T gt 0 and scalar designparameter 120574 gt 0 Then for large enough control gain 119870V thesliding mode r(119905) and NN weight estimates are uniformlyultimate bounded Moreover the tracking error may be kept assmall as desired by increasing the gains 119870V in (20)
Proof Consider the following Lyapunov function candidate
119881 =
1
2
r119879119872r + 12
tr (T119865minus1) (23)
where tr(sdot) denotes the matrix trace operator matrix 119865 is theadaptive law gain
Differentiating (23) yields
= r119879119872 r + tr (T119865minus1 )
= minusr119879 (119870V + 119863) r + tr (119879(119865minus1 + 120601 (x) r119879))
+ r119879 (120576 minus 120591119889)
(24)
Substituting (22) in (24) and using the fact that = minus
yield the following expression
= minusr119879 (119870V + 119863) r + 120574 r tr 119879(119882 minus ) + r119879 (120576 minus 120591
119889)
(25)
Since trT(119882 minus ) = ⟨119882⟩
119865minus
2
119865le
119865119882119865minus
2
119865 (25) yields
le minus r119879119870Vr + 120574 r sdot10038171003817100381710038171003817
10038171003817100381710038171003817119865(119882119865
minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
le minus 119870Vminr2+ 120574 r sdot 1003817100381710038171003817
1003817
10038171003817100381710038171003817119865(119882119861minus
10038171003817100381710038171003817
10038171003817100381710038171003817119865)
+ (120576119873+ 119887119889) r
= minus r [119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865
times (
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)]
(26)
which is negative as long as the term in braces is positiveCompleting the square yields
119870Vmin r + 12057410038171003817100381710038171003817
10038171003817100381710038171003817119865(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus119882119861) minus (120576
119873+ 119887119889)
= 120574(
10038171003817100381710038171003817
10038171003817100381710038171003817119865minus
119882119861
2
)
2
minus
1205741198822
119861
4
+ 119870Vmin r minus (120576119873 + 119887119889) (27)
which is guaranteed positive as long as
r gt1205741198822
1198614 + (120576
119873+ 119887119889)
119870Vminequiv 119887119903
(28)
or
10038171003817100381710038171003817
10038171003817100381710038171003817119865gt
119882119861
2
+ radic1205741198822
119861
4
+
120576119873+ 119887119889
120574
equiv 119887119882 (29)
Thus is negative outside a compact set this demonstratesthe UUB (uniformly ultimate bounded) of both r and119865 Since any excursions of r or
119865beyond the
bounds given in (28) and (29) respectively lead to a decreasein the Lyapunov function 119871 it follows that the right-handsides of (28) and (29) can be taken as practical bounds onr and
119865 respectively Note from (28) moreover that
arbitrarily small error bounds may be achieved by selectinglarge tracking control gains119870V
6 Journal of Applied Mathematics
Time (s)0 05 1 15 2 25 3 35 4 45 5
0
50
100
minus50
Con
trol i
nput
ofx
-axi
s
(a)
0 05 1 15 2 25 3 35 4 45 5
0
50
100
Time (s)
minus50
Con
trol i
nput
ofy
-axi
s
(b)
Figure 7 Control inputs for gyroscope with adaptive neural sliding compensator ((a) 119906119909 (b) 119906
119910)
0 1 2 3 4 5
0
20
40
60
Time (s)
minus40
minus20
EstimationActual
Appr
oxim
atio
n of
x-a
xis
Figure 8 RBF network approximation of 119909-axis component withadaptive neural sliding compensator
0 05 1 15 2 25 3 35 4 45 5
0
20
40
60
Time (s)
minus40
minus20
minus60
App
roxi
mat
ion
ofy
-axi
s
EstimationActual
Figure 9 RBF network approximation of 119910-axis component withadaptive neural sliding compensator
Remark 2 Given119860 = [119886119894119895] the Frobenius norm is defined by
1198602
119865= tr (119860119879119860) = sum1198862
119894119895 (30)
The associated inner product is ⟨119860 119861⟩119865= tr(119860119879119861) where the
dimensions of 119860 and 119861 are suitable for matrix product
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdxqx
Figure 10 Position tracking of 119909-axis without NN controller
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 11 Position tracking of 119910-axis without NN controller
5 Simulation Analysis
In this section we will evaluate the proposed adaptive neuralnetwork scheme which will require no knowledge of thedynamics not even their structure on the lumped MEMSgyroscope sensor model [3 4] The control objective is tomaintain the gyroscope system to track the desired reference
Journal of Applied Mathematics 7
0 1 2 3 4 5 6 7
0
005Tracking errors
Time (s)
minus005
minus01
Tracking error of x-axis
(a)
Tracking errors
0 1 2 3 4 5 6 7
0
005
Time (s)
minus005
minus01
Tracking error of y-axis
(b)
Figure 12 Tracking errors with neural compensator
trajectory and estimate the unknown function f(x) as in (10)The parameters of the MEMS gyroscope are shown as
119898 = 18 times 10minus7kg 119896
119909119909= 63955Nm
119896119910119910= 9592Nm 119896
119909119910= 12779Nm
119889119909119909= 18 times 10
minus6N sdot sm 119889119910119910= 18 times 10
minus6N sdot sm
119889119909119910= 36 times 10
minus7N sdot sm(31)
The unknown angular velocity is assumed Ω119911= 100 rads
The desired trajectory is defined as 119902119889119909= 01lowastcos(120596
1119905) 119902119889119910=
01 lowast cos(1205962119905) where 120596
1= 617 and 120596
2= 511
The external disturbance is 120591119889= [(sin(617 lowast 119905))2 +
cos(617 lowast 119905) (sin(511 lowast 119905))2 + cos(511 lowast 119905)]119879The gain matrix 119870V was taken as 119870V = diag50 50
sliding parameter Λ = diag5 5 The RBF neural networkis composed of 45 nodes As we will see from the subsequentfigure that the unique PD controller (119870Vr) could ensure thatthe tracking error belongs to a compact set Thus when wedesign the RBF net centroids we constrain our attention onthat compact set and take width 120590 = 1 The response withthese controller parameters when q = 0 and q = 0 is shownin the following figures
Figures 4 and 5 show the proof mass along 119909-axis and119910-axis tracking trajectories respectively Figure 6 depicts thetracking errors It can be seen that the tracking error belongsto a small region with the adaptive RBF sliding compensatorThe control inputs appear in Figure 7 As seen from thefigure the control inputs are continuous and smooth withrespect to time which implies that the proposed controller iseasy to implement Figures 8 and 9 show the approximationof RBF network to unknown MEMS gyroscope functionf(x) The approximation result is impressive because of thesatisfactory performance of the RBFNNAs shown in the twofigures RBF NN could approximate the unknown gyroscopefunction quickly using the available measured signals xthroughout the whole compact set
In order to demonstrate the contribution of RBF NN theresponse without RBF NN is also discussed and shown as inFigures 10 and 11 The responses with the controller 120591 = 119870Vrthat is with no neural network are drawn A PD controllershould give bounded errors if 119870V is large enough and the
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus015
minus01
minus005
minus02
qdxqx
x-a
xis p
ositi
on tr
acki
ng
Figure 13 119909-axis position tracking with neural compensator
tracking errors belong to a compact set It is very clear thatthe addition of the NNmakes a very significant improvementin the tracking performance
To compare the performance of the proposed controllerand the neural compensator without sliding mode methodin [16] Figures 12 13 and 14 show the response with theneural compensator under the same gyroscope parametersand disturbances introduced herein
The tracking results with neural compensator showclearly that both the convergence time and the ultimatetracking error bound are worse than the proposed neuralsliding mode controller demonstrating that adaptive slidingmode controller using neural network approximation couldimprove the dynamic and static performance
6 Conclusion
The trajectory control of the MEMS gyroscope using adap-tive NN controller is investigated A novel weight tuningalgorithm designed based on Lyapunov stability theorem isderived to establish the bounded tracking errors and NNweights which consists of a standard term plus robust signalthat provides the possibility of arbitrary small tracking errorIt is clearly observed that the MEMS gyroscope function
8 Journal of Applied Mathematics
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus01
minus015
minus02
minus005
qdyqy
y-a
xis p
ositi
on tr
acki
ng
Figure 14 119910-axis position tracking with neural compensator
f(x) can be effectively approximated by its estimate f(x)using the RBF neural network and the tracking error ofthe proof mass can be greatly improved in the presence ofmodel uncertainties and external disturbances Numericalsimulations verify the effectiveness of the proposed adaptiveNN compensation scheme to cope with all structured andunstructured uncertainties existing in the MEMS gyroscope
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank the anonymous reviewers for their usefulcomments that improved the quality of the paper This workis partially supported by National Science Foundation ofChina under Grant no 61374100 Natural Science Founda-tion of Jiangsu Province under Grant no BK20131136 theUniversity Graduate Research and Innovation Projects ofJiangsu Province under Grant no CXLX12 0235 and theFundamental Research Funds for the Central Universitiesunder Grant no 2013B24614
References
[1] R P Leland ldquoAdaptive control of a MEMS gyroscope usinglyapunov methodsrdquo IEEE Transactions on Control SystemsTechnology vol 14 no 2 pp 278ndash283 2006
[2] S Park R Horowitz S K Hong and Y Nam ldquoTrajectory-switching algorithm for aMEMS gyroscoperdquo IEEE Transactionson Instrumentation and Measurement vol 56 no 6 pp 2561ndash2569 2007
[3] C Batur T Sreeramreddy and Q Khasawneh ldquoSliding modecontrol of a simulatedMEMS gyroscoperdquo ISA Transactions vol45 no 1 pp 99ndash108 2006
[4] J Fei and C Batur ldquoA novel adaptive sliding mode control withapplication to MEMS gyroscoperdquo ISA Transactions vol 48 no1 pp 73ndash78 2009
[5] N-C Tsai and C-Y Sue ldquoIntegrated model reference adaptivecontrol and time-varying angular rate estimation for micro-machined gyroscopesrdquo International Journal of Control vol 83no 2 pp 246ndash256 2010
[6] J Raman E Cretu P Rombouts and L Weyten ldquoA closed-loop digitally controlled MEMS gyroscope with unconstrainedsigma-delta force-feedbackrdquo IEEE Sensors Journal vol 9 no 3pp 297ndash305 2009
[7] F Lewis S Jagannathan and A Yesildirek Neural NetworkControl of Robot Manipulators Taylor and Francis 1999
[8] F L Lewis K Liu and A Yesildirek ldquoNeural net robotcontroller with guaranteed tracking performancerdquo IEEE Trans-actions on Neural Networks vol 6 no 3 pp 703ndash715 1995
[9] G Feng ldquoA compensating scheme for robot tracking based onneural networksrdquo Robotics and Autonomous Systems vol 15 no3 pp 199ndash206 1995
[10] S-C Lin and Y-Y Chen ldquoRBF network-based sliding modecontrolrdquo in Proceedings of the IEEE International Conference onSystems Man and Cybernetics pp 1957ndash1961 October 1994
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] N Sadati and R Ghadami ldquoAdaptive multi-model slidingmode control of robotic manipulators using soft computingrdquoNeurocomputing vol 71 no 13ndash15 pp 2702ndash2710 2008
[13] M-J Lee and Y-K Choi ldquoAn adaptive neurocontroller usingRBFN for robot manipulatorsrdquo IEEE Transactions on IndustrialElectronics vol 51 no 3 pp 711ndash717 2004
[14] F-J Lin S-Y Chen and K-K Shyu ldquoRobust dynamic sliding-mode control using adaptive RENN for magnetic levitationsystemrdquo IEEE Transactions on Neural Networks vol 20 no 6pp 938ndash951 2009
[15] S-J Huang K-S Huang and K-C Chiou ldquoDevelopmentand application of a novel radial basis function sliding modecontrollerrdquoMechatronics vol 13 no 4 pp 313ndash329 2003
[16] J Fei and Y Yang ldquoAdaptive neural compensation scheme forrobust tracking of MEMS gyroscopesrdquo in Proceedings of IEEEConference on SMC pp 1546ndash1551 Seoul Korea 2012
[17] J Fei and M Xin ldquoAn adaptive fuzzy sliding mode controllerfor MEMS triaxial gyroscope with angular velocity estimationrdquoNonlinear Dynamics vol 24 no 1 pp 201ndash210 2012
[18] J Fei and H Ding ldquoAdaptive neural sliding mode controlof MEMS triaxial gyroscope based on feedback linearizationapproachrdquo in Proceedings of Annual Conference of SICE pp1271ndash1276 Akita Japan 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
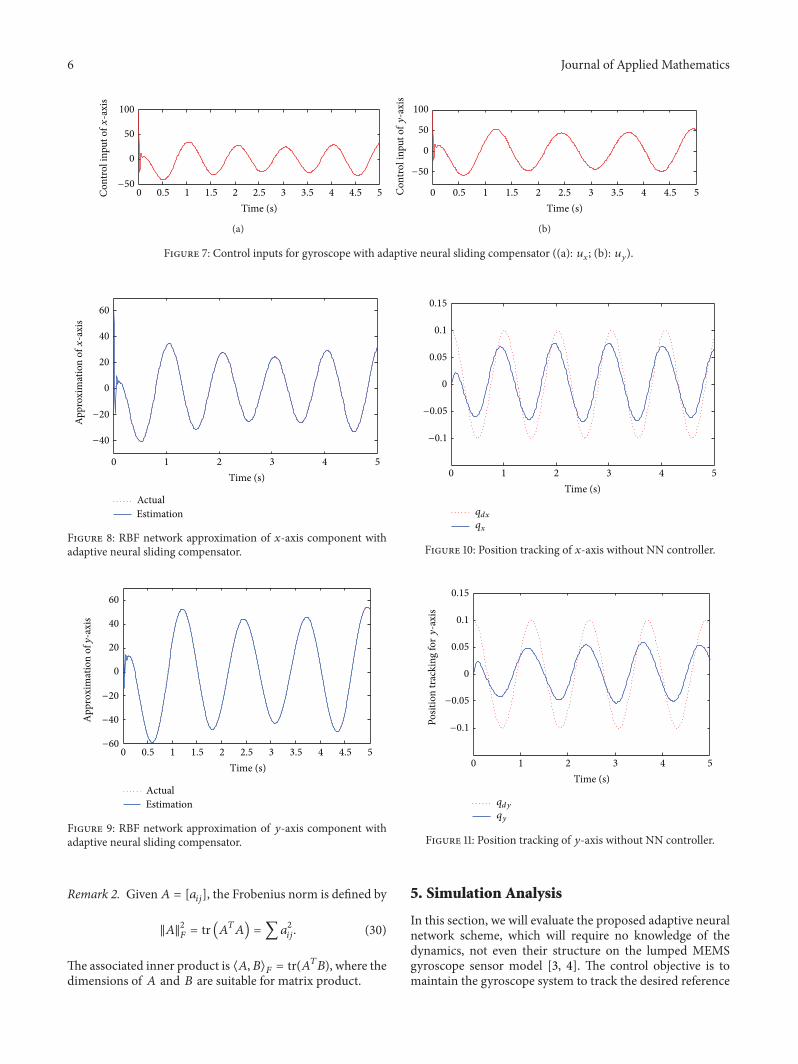
6 Journal of Applied Mathematics
Time (s)0 05 1 15 2 25 3 35 4 45 5
0
50
100
minus50
Con
trol i
nput
ofx
-axi
s
(a)
0 05 1 15 2 25 3 35 4 45 5
0
50
100
Time (s)
minus50
Con
trol i
nput
ofy
-axi
s
(b)
Figure 7 Control inputs for gyroscope with adaptive neural sliding compensator ((a) 119906119909 (b) 119906
119910)
0 1 2 3 4 5
0
20
40
60
Time (s)
minus40
minus20
EstimationActual
Appr
oxim
atio
n of
x-a
xis
Figure 8 RBF network approximation of 119909-axis component withadaptive neural sliding compensator
0 05 1 15 2 25 3 35 4 45 5
0
20
40
60
Time (s)
minus40
minus20
minus60
App
roxi
mat
ion
ofy
-axi
s
EstimationActual
Figure 9 RBF network approximation of 119910-axis component withadaptive neural sliding compensator
Remark 2 Given119860 = [119886119894119895] the Frobenius norm is defined by
1198602
119865= tr (119860119879119860) = sum1198862
119894119895 (30)
The associated inner product is ⟨119860 119861⟩119865= tr(119860119879119861) where the
dimensions of 119860 and 119861 are suitable for matrix product
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdxqx
Figure 10 Position tracking of 119909-axis without NN controller
0 1 2 3 4 5
0
005
01
015
Time (s)
minus01
minus005
qdyqy
Posit
ion
trac
king
fory
-axi
s
Figure 11 Position tracking of 119910-axis without NN controller
5 Simulation Analysis
In this section we will evaluate the proposed adaptive neuralnetwork scheme which will require no knowledge of thedynamics not even their structure on the lumped MEMSgyroscope sensor model [3 4] The control objective is tomaintain the gyroscope system to track the desired reference
Journal of Applied Mathematics 7
0 1 2 3 4 5 6 7
0
005Tracking errors
Time (s)
minus005
minus01
Tracking error of x-axis
(a)
Tracking errors
0 1 2 3 4 5 6 7
0
005
Time (s)
minus005
minus01
Tracking error of y-axis
(b)
Figure 12 Tracking errors with neural compensator
trajectory and estimate the unknown function f(x) as in (10)The parameters of the MEMS gyroscope are shown as
119898 = 18 times 10minus7kg 119896
119909119909= 63955Nm
119896119910119910= 9592Nm 119896
119909119910= 12779Nm
119889119909119909= 18 times 10
minus6N sdot sm 119889119910119910= 18 times 10
minus6N sdot sm
119889119909119910= 36 times 10
minus7N sdot sm(31)
The unknown angular velocity is assumed Ω119911= 100 rads
The desired trajectory is defined as 119902119889119909= 01lowastcos(120596
1119905) 119902119889119910=
01 lowast cos(1205962119905) where 120596
1= 617 and 120596
2= 511
The external disturbance is 120591119889= [(sin(617 lowast 119905))2 +
cos(617 lowast 119905) (sin(511 lowast 119905))2 + cos(511 lowast 119905)]119879The gain matrix 119870V was taken as 119870V = diag50 50
sliding parameter Λ = diag5 5 The RBF neural networkis composed of 45 nodes As we will see from the subsequentfigure that the unique PD controller (119870Vr) could ensure thatthe tracking error belongs to a compact set Thus when wedesign the RBF net centroids we constrain our attention onthat compact set and take width 120590 = 1 The response withthese controller parameters when q = 0 and q = 0 is shownin the following figures
Figures 4 and 5 show the proof mass along 119909-axis and119910-axis tracking trajectories respectively Figure 6 depicts thetracking errors It can be seen that the tracking error belongsto a small region with the adaptive RBF sliding compensatorThe control inputs appear in Figure 7 As seen from thefigure the control inputs are continuous and smooth withrespect to time which implies that the proposed controller iseasy to implement Figures 8 and 9 show the approximationof RBF network to unknown MEMS gyroscope functionf(x) The approximation result is impressive because of thesatisfactory performance of the RBFNNAs shown in the twofigures RBF NN could approximate the unknown gyroscopefunction quickly using the available measured signals xthroughout the whole compact set
In order to demonstrate the contribution of RBF NN theresponse without RBF NN is also discussed and shown as inFigures 10 and 11 The responses with the controller 120591 = 119870Vrthat is with no neural network are drawn A PD controllershould give bounded errors if 119870V is large enough and the
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus015
minus01
minus005
minus02
qdxqx
x-a
xis p
ositi
on tr
acki
ng
Figure 13 119909-axis position tracking with neural compensator
tracking errors belong to a compact set It is very clear thatthe addition of the NNmakes a very significant improvementin the tracking performance
To compare the performance of the proposed controllerand the neural compensator without sliding mode methodin [16] Figures 12 13 and 14 show the response with theneural compensator under the same gyroscope parametersand disturbances introduced herein
The tracking results with neural compensator showclearly that both the convergence time and the ultimatetracking error bound are worse than the proposed neuralsliding mode controller demonstrating that adaptive slidingmode controller using neural network approximation couldimprove the dynamic and static performance
6 Conclusion
The trajectory control of the MEMS gyroscope using adap-tive NN controller is investigated A novel weight tuningalgorithm designed based on Lyapunov stability theorem isderived to establish the bounded tracking errors and NNweights which consists of a standard term plus robust signalthat provides the possibility of arbitrary small tracking errorIt is clearly observed that the MEMS gyroscope function
8 Journal of Applied Mathematics
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus01
minus015
minus02
minus005
qdyqy
y-a
xis p
ositi
on tr
acki
ng
Figure 14 119910-axis position tracking with neural compensator
f(x) can be effectively approximated by its estimate f(x)using the RBF neural network and the tracking error ofthe proof mass can be greatly improved in the presence ofmodel uncertainties and external disturbances Numericalsimulations verify the effectiveness of the proposed adaptiveNN compensation scheme to cope with all structured andunstructured uncertainties existing in the MEMS gyroscope
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank the anonymous reviewers for their usefulcomments that improved the quality of the paper This workis partially supported by National Science Foundation ofChina under Grant no 61374100 Natural Science Founda-tion of Jiangsu Province under Grant no BK20131136 theUniversity Graduate Research and Innovation Projects ofJiangsu Province under Grant no CXLX12 0235 and theFundamental Research Funds for the Central Universitiesunder Grant no 2013B24614
References
[1] R P Leland ldquoAdaptive control of a MEMS gyroscope usinglyapunov methodsrdquo IEEE Transactions on Control SystemsTechnology vol 14 no 2 pp 278ndash283 2006
[2] S Park R Horowitz S K Hong and Y Nam ldquoTrajectory-switching algorithm for aMEMS gyroscoperdquo IEEE Transactionson Instrumentation and Measurement vol 56 no 6 pp 2561ndash2569 2007
[3] C Batur T Sreeramreddy and Q Khasawneh ldquoSliding modecontrol of a simulatedMEMS gyroscoperdquo ISA Transactions vol45 no 1 pp 99ndash108 2006
[4] J Fei and C Batur ldquoA novel adaptive sliding mode control withapplication to MEMS gyroscoperdquo ISA Transactions vol 48 no1 pp 73ndash78 2009
[5] N-C Tsai and C-Y Sue ldquoIntegrated model reference adaptivecontrol and time-varying angular rate estimation for micro-machined gyroscopesrdquo International Journal of Control vol 83no 2 pp 246ndash256 2010
[6] J Raman E Cretu P Rombouts and L Weyten ldquoA closed-loop digitally controlled MEMS gyroscope with unconstrainedsigma-delta force-feedbackrdquo IEEE Sensors Journal vol 9 no 3pp 297ndash305 2009
[7] F Lewis S Jagannathan and A Yesildirek Neural NetworkControl of Robot Manipulators Taylor and Francis 1999
[8] F L Lewis K Liu and A Yesildirek ldquoNeural net robotcontroller with guaranteed tracking performancerdquo IEEE Trans-actions on Neural Networks vol 6 no 3 pp 703ndash715 1995
[9] G Feng ldquoA compensating scheme for robot tracking based onneural networksrdquo Robotics and Autonomous Systems vol 15 no3 pp 199ndash206 1995
[10] S-C Lin and Y-Y Chen ldquoRBF network-based sliding modecontrolrdquo in Proceedings of the IEEE International Conference onSystems Man and Cybernetics pp 1957ndash1961 October 1994
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] N Sadati and R Ghadami ldquoAdaptive multi-model slidingmode control of robotic manipulators using soft computingrdquoNeurocomputing vol 71 no 13ndash15 pp 2702ndash2710 2008
[13] M-J Lee and Y-K Choi ldquoAn adaptive neurocontroller usingRBFN for robot manipulatorsrdquo IEEE Transactions on IndustrialElectronics vol 51 no 3 pp 711ndash717 2004
[14] F-J Lin S-Y Chen and K-K Shyu ldquoRobust dynamic sliding-mode control using adaptive RENN for magnetic levitationsystemrdquo IEEE Transactions on Neural Networks vol 20 no 6pp 938ndash951 2009
[15] S-J Huang K-S Huang and K-C Chiou ldquoDevelopmentand application of a novel radial basis function sliding modecontrollerrdquoMechatronics vol 13 no 4 pp 313ndash329 2003
[16] J Fei and Y Yang ldquoAdaptive neural compensation scheme forrobust tracking of MEMS gyroscopesrdquo in Proceedings of IEEEConference on SMC pp 1546ndash1551 Seoul Korea 2012
[17] J Fei and M Xin ldquoAn adaptive fuzzy sliding mode controllerfor MEMS triaxial gyroscope with angular velocity estimationrdquoNonlinear Dynamics vol 24 no 1 pp 201ndash210 2012
[18] J Fei and H Ding ldquoAdaptive neural sliding mode controlof MEMS triaxial gyroscope based on feedback linearizationapproachrdquo in Proceedings of Annual Conference of SICE pp1271ndash1276 Akita Japan 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Applied Mathematics 7
0 1 2 3 4 5 6 7
0
005Tracking errors
Time (s)
minus005
minus01
Tracking error of x-axis
(a)
Tracking errors
0 1 2 3 4 5 6 7
0
005
Time (s)
minus005
minus01
Tracking error of y-axis
(b)
Figure 12 Tracking errors with neural compensator
trajectory and estimate the unknown function f(x) as in (10)The parameters of the MEMS gyroscope are shown as
119898 = 18 times 10minus7kg 119896
119909119909= 63955Nm
119896119910119910= 9592Nm 119896
119909119910= 12779Nm
119889119909119909= 18 times 10
minus6N sdot sm 119889119910119910= 18 times 10
minus6N sdot sm
119889119909119910= 36 times 10
minus7N sdot sm(31)
The unknown angular velocity is assumed Ω119911= 100 rads
The desired trajectory is defined as 119902119889119909= 01lowastcos(120596
1119905) 119902119889119910=
01 lowast cos(1205962119905) where 120596
1= 617 and 120596
2= 511
The external disturbance is 120591119889= [(sin(617 lowast 119905))2 +
cos(617 lowast 119905) (sin(511 lowast 119905))2 + cos(511 lowast 119905)]119879The gain matrix 119870V was taken as 119870V = diag50 50
sliding parameter Λ = diag5 5 The RBF neural networkis composed of 45 nodes As we will see from the subsequentfigure that the unique PD controller (119870Vr) could ensure thatthe tracking error belongs to a compact set Thus when wedesign the RBF net centroids we constrain our attention onthat compact set and take width 120590 = 1 The response withthese controller parameters when q = 0 and q = 0 is shownin the following figures
Figures 4 and 5 show the proof mass along 119909-axis and119910-axis tracking trajectories respectively Figure 6 depicts thetracking errors It can be seen that the tracking error belongsto a small region with the adaptive RBF sliding compensatorThe control inputs appear in Figure 7 As seen from thefigure the control inputs are continuous and smooth withrespect to time which implies that the proposed controller iseasy to implement Figures 8 and 9 show the approximationof RBF network to unknown MEMS gyroscope functionf(x) The approximation result is impressive because of thesatisfactory performance of the RBFNNAs shown in the twofigures RBF NN could approximate the unknown gyroscopefunction quickly using the available measured signals xthroughout the whole compact set
In order to demonstrate the contribution of RBF NN theresponse without RBF NN is also discussed and shown as inFigures 10 and 11 The responses with the controller 120591 = 119870Vrthat is with no neural network are drawn A PD controllershould give bounded errors if 119870V is large enough and the
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus015
minus01
minus005
minus02
qdxqx
x-a
xis p
ositi
on tr
acki
ng
Figure 13 119909-axis position tracking with neural compensator
tracking errors belong to a compact set It is very clear thatthe addition of the NNmakes a very significant improvementin the tracking performance
To compare the performance of the proposed controllerand the neural compensator without sliding mode methodin [16] Figures 12 13 and 14 show the response with theneural compensator under the same gyroscope parametersand disturbances introduced herein
The tracking results with neural compensator showclearly that both the convergence time and the ultimatetracking error bound are worse than the proposed neuralsliding mode controller demonstrating that adaptive slidingmode controller using neural network approximation couldimprove the dynamic and static performance
6 Conclusion
The trajectory control of the MEMS gyroscope using adap-tive NN controller is investigated A novel weight tuningalgorithm designed based on Lyapunov stability theorem isderived to establish the bounded tracking errors and NNweights which consists of a standard term plus robust signalthat provides the possibility of arbitrary small tracking errorIt is clearly observed that the MEMS gyroscope function
8 Journal of Applied Mathematics
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus01
minus015
minus02
minus005
qdyqy
y-a
xis p
ositi
on tr
acki
ng
Figure 14 119910-axis position tracking with neural compensator
f(x) can be effectively approximated by its estimate f(x)using the RBF neural network and the tracking error ofthe proof mass can be greatly improved in the presence ofmodel uncertainties and external disturbances Numericalsimulations verify the effectiveness of the proposed adaptiveNN compensation scheme to cope with all structured andunstructured uncertainties existing in the MEMS gyroscope
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank the anonymous reviewers for their usefulcomments that improved the quality of the paper This workis partially supported by National Science Foundation ofChina under Grant no 61374100 Natural Science Founda-tion of Jiangsu Province under Grant no BK20131136 theUniversity Graduate Research and Innovation Projects ofJiangsu Province under Grant no CXLX12 0235 and theFundamental Research Funds for the Central Universitiesunder Grant no 2013B24614
References
[1] R P Leland ldquoAdaptive control of a MEMS gyroscope usinglyapunov methodsrdquo IEEE Transactions on Control SystemsTechnology vol 14 no 2 pp 278ndash283 2006
[2] S Park R Horowitz S K Hong and Y Nam ldquoTrajectory-switching algorithm for aMEMS gyroscoperdquo IEEE Transactionson Instrumentation and Measurement vol 56 no 6 pp 2561ndash2569 2007
[3] C Batur T Sreeramreddy and Q Khasawneh ldquoSliding modecontrol of a simulatedMEMS gyroscoperdquo ISA Transactions vol45 no 1 pp 99ndash108 2006
[4] J Fei and C Batur ldquoA novel adaptive sliding mode control withapplication to MEMS gyroscoperdquo ISA Transactions vol 48 no1 pp 73ndash78 2009
[5] N-C Tsai and C-Y Sue ldquoIntegrated model reference adaptivecontrol and time-varying angular rate estimation for micro-machined gyroscopesrdquo International Journal of Control vol 83no 2 pp 246ndash256 2010
[6] J Raman E Cretu P Rombouts and L Weyten ldquoA closed-loop digitally controlled MEMS gyroscope with unconstrainedsigma-delta force-feedbackrdquo IEEE Sensors Journal vol 9 no 3pp 297ndash305 2009
[7] F Lewis S Jagannathan and A Yesildirek Neural NetworkControl of Robot Manipulators Taylor and Francis 1999
[8] F L Lewis K Liu and A Yesildirek ldquoNeural net robotcontroller with guaranteed tracking performancerdquo IEEE Trans-actions on Neural Networks vol 6 no 3 pp 703ndash715 1995
[9] G Feng ldquoA compensating scheme for robot tracking based onneural networksrdquo Robotics and Autonomous Systems vol 15 no3 pp 199ndash206 1995
[10] S-C Lin and Y-Y Chen ldquoRBF network-based sliding modecontrolrdquo in Proceedings of the IEEE International Conference onSystems Man and Cybernetics pp 1957ndash1961 October 1994
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] N Sadati and R Ghadami ldquoAdaptive multi-model slidingmode control of robotic manipulators using soft computingrdquoNeurocomputing vol 71 no 13ndash15 pp 2702ndash2710 2008
[13] M-J Lee and Y-K Choi ldquoAn adaptive neurocontroller usingRBFN for robot manipulatorsrdquo IEEE Transactions on IndustrialElectronics vol 51 no 3 pp 711ndash717 2004
[14] F-J Lin S-Y Chen and K-K Shyu ldquoRobust dynamic sliding-mode control using adaptive RENN for magnetic levitationsystemrdquo IEEE Transactions on Neural Networks vol 20 no 6pp 938ndash951 2009
[15] S-J Huang K-S Huang and K-C Chiou ldquoDevelopmentand application of a novel radial basis function sliding modecontrollerrdquoMechatronics vol 13 no 4 pp 313ndash329 2003
[16] J Fei and Y Yang ldquoAdaptive neural compensation scheme forrobust tracking of MEMS gyroscopesrdquo in Proceedings of IEEEConference on SMC pp 1546ndash1551 Seoul Korea 2012
[17] J Fei and M Xin ldquoAn adaptive fuzzy sliding mode controllerfor MEMS triaxial gyroscope with angular velocity estimationrdquoNonlinear Dynamics vol 24 no 1 pp 201ndash210 2012
[18] J Fei and H Ding ldquoAdaptive neural sliding mode controlof MEMS triaxial gyroscope based on feedback linearizationapproachrdquo in Proceedings of Annual Conference of SICE pp1271ndash1276 Akita Japan 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Journal of Applied Mathematics
0 1 2 3 4 5 6 7
0
005
01
015
Time (s)
minus01
minus015
minus02
minus005
qdyqy
y-a
xis p
ositi
on tr
acki
ng
Figure 14 119910-axis position tracking with neural compensator
f(x) can be effectively approximated by its estimate f(x)using the RBF neural network and the tracking error ofthe proof mass can be greatly improved in the presence ofmodel uncertainties and external disturbances Numericalsimulations verify the effectiveness of the proposed adaptiveNN compensation scheme to cope with all structured andunstructured uncertainties existing in the MEMS gyroscope
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors thank the anonymous reviewers for their usefulcomments that improved the quality of the paper This workis partially supported by National Science Foundation ofChina under Grant no 61374100 Natural Science Founda-tion of Jiangsu Province under Grant no BK20131136 theUniversity Graduate Research and Innovation Projects ofJiangsu Province under Grant no CXLX12 0235 and theFundamental Research Funds for the Central Universitiesunder Grant no 2013B24614
References
[1] R P Leland ldquoAdaptive control of a MEMS gyroscope usinglyapunov methodsrdquo IEEE Transactions on Control SystemsTechnology vol 14 no 2 pp 278ndash283 2006
[2] S Park R Horowitz S K Hong and Y Nam ldquoTrajectory-switching algorithm for aMEMS gyroscoperdquo IEEE Transactionson Instrumentation and Measurement vol 56 no 6 pp 2561ndash2569 2007
[3] C Batur T Sreeramreddy and Q Khasawneh ldquoSliding modecontrol of a simulatedMEMS gyroscoperdquo ISA Transactions vol45 no 1 pp 99ndash108 2006
[4] J Fei and C Batur ldquoA novel adaptive sliding mode control withapplication to MEMS gyroscoperdquo ISA Transactions vol 48 no1 pp 73ndash78 2009
[5] N-C Tsai and C-Y Sue ldquoIntegrated model reference adaptivecontrol and time-varying angular rate estimation for micro-machined gyroscopesrdquo International Journal of Control vol 83no 2 pp 246ndash256 2010
[6] J Raman E Cretu P Rombouts and L Weyten ldquoA closed-loop digitally controlled MEMS gyroscope with unconstrainedsigma-delta force-feedbackrdquo IEEE Sensors Journal vol 9 no 3pp 297ndash305 2009
[7] F Lewis S Jagannathan and A Yesildirek Neural NetworkControl of Robot Manipulators Taylor and Francis 1999
[8] F L Lewis K Liu and A Yesildirek ldquoNeural net robotcontroller with guaranteed tracking performancerdquo IEEE Trans-actions on Neural Networks vol 6 no 3 pp 703ndash715 1995
[9] G Feng ldquoA compensating scheme for robot tracking based onneural networksrdquo Robotics and Autonomous Systems vol 15 no3 pp 199ndash206 1995
[10] S-C Lin and Y-Y Chen ldquoRBF network-based sliding modecontrolrdquo in Proceedings of the IEEE International Conference onSystems Man and Cybernetics pp 1957ndash1961 October 1994
[11] B S Park S J Yoo J B Park and Y H Choi ldquoAdaptive neuralsliding mode control of nonholonomic wheeled mobile robotswith model uncertaintyrdquo IEEE Transactions on Control SystemsTechnology vol 17 no 1 pp 207ndash214 2009
[12] N Sadati and R Ghadami ldquoAdaptive multi-model slidingmode control of robotic manipulators using soft computingrdquoNeurocomputing vol 71 no 13ndash15 pp 2702ndash2710 2008
[13] M-J Lee and Y-K Choi ldquoAn adaptive neurocontroller usingRBFN for robot manipulatorsrdquo IEEE Transactions on IndustrialElectronics vol 51 no 3 pp 711ndash717 2004
[14] F-J Lin S-Y Chen and K-K Shyu ldquoRobust dynamic sliding-mode control using adaptive RENN for magnetic levitationsystemrdquo IEEE Transactions on Neural Networks vol 20 no 6pp 938ndash951 2009
[15] S-J Huang K-S Huang and K-C Chiou ldquoDevelopmentand application of a novel radial basis function sliding modecontrollerrdquoMechatronics vol 13 no 4 pp 313ndash329 2003
[16] J Fei and Y Yang ldquoAdaptive neural compensation scheme forrobust tracking of MEMS gyroscopesrdquo in Proceedings of IEEEConference on SMC pp 1546ndash1551 Seoul Korea 2012
[17] J Fei and M Xin ldquoAn adaptive fuzzy sliding mode controllerfor MEMS triaxial gyroscope with angular velocity estimationrdquoNonlinear Dynamics vol 24 no 1 pp 201ndash210 2012
[18] J Fei and H Ding ldquoAdaptive neural sliding mode controlof MEMS triaxial gyroscope based on feedback linearizationapproachrdquo in Proceedings of Annual Conference of SICE pp1271ndash1276 Akita Japan 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of