projection global consistency: application in ai planning pavel surynek charles university, prague...
TRANSCRIPT

Projection Global Projection Global Consistency:Consistency:Application in AI PlanningApplication in AI Planning
Pavel SurynekPavel Surynek
Charles University, PragueCharles University, PragueCzech RepublicCzech Republic
Outline of the Outline of the presentationpresentation
Problem: Problem: select a set of non-mutex select a set of non-mutex actions supporting a goalactions supporting a goal
Obstacle: Obstacle: NP-completeNP-complete (Partial) solution: global consistency - (Partial) solution: global consistency -
projection consistencyprojection consistency Application:Application: AI Planning AI Planning using using
planning graphsplanning graphs Experiments: Experiments: several planning several planning
domainsdomains
CSCLP 2006 Pavel Surynek

Problem - support Problem - support problemproblem
GoalGoal = finite = finite set of atomsset of atoms Action Action = triple (preconditions, = triple (preconditions,
positive effects, negative effects)positive effects, negative effects)
CSCLP 2006 Pavel Surynek
Goal:
A1
A2
A3
A4
A5
A6
A7
A8
A9
A10 A11
A12
x
atom 1 atom 2 atom 3 atom 4
supports foratom 1
supports foratom 2
supports foratom 3
supports foratom 4
xx
x x
x
x
x
A1
A2
A3
A4
A6
A9
A8
A10 A11
A12
A5
A7 solution - mutex free
Mutex actionsMutex actions
CSCLP 2006 Pavel Surynek
3 1
2
1
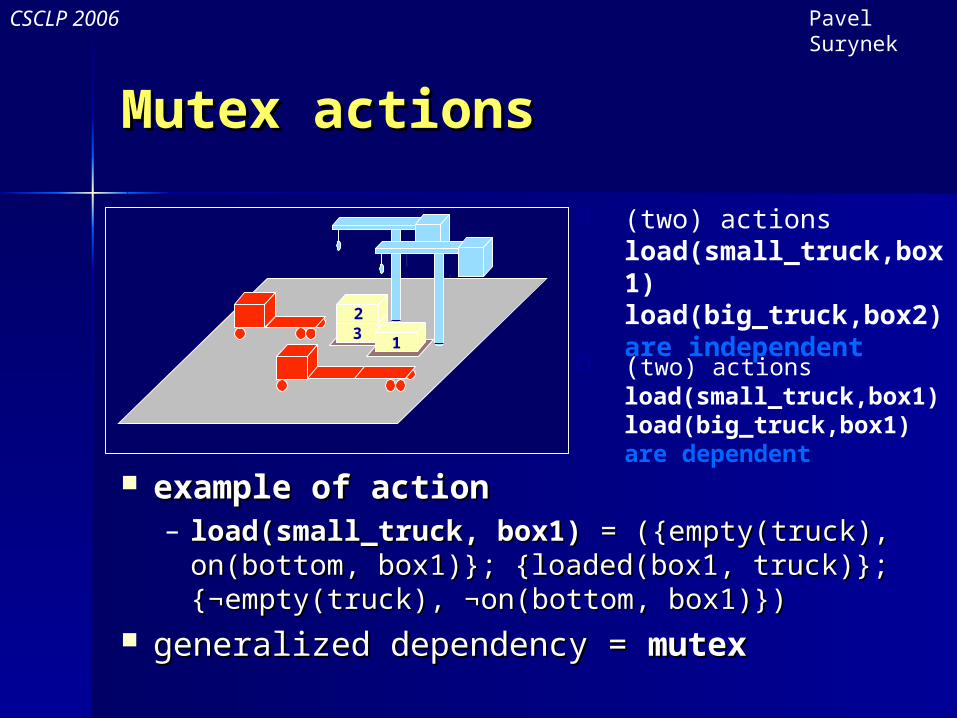
(two) actionsload(small_truck,box1)load(big_truck,box2)are independent
(two) actionsload(small_truck,box1)load(big_truck,box1)are dependent
example of actionexample of action– load(small_truck, box1) load(small_truck, box1) = ({empty(truck), = ({empty(truck),
on(bottom, box1)}; {loaded(box1, truck)}; on(bottom, box1)}; {loaded(box1, truck)}; {{¬¬empty(truck), empty(truck), ¬¬on(bottom, box1)})on(bottom, box1)})
generalized dependency = generalized dependency = mutexmutex

Obstacle - NP Obstacle - NP completenesscompleteness
Instance:Instance:– goal goal augmented with augmented with finite sets of finite sets of
supporting actionssupporting actions– finite set of finite set of mutexes between actionsmutexes between actions
Answer:Answer:– set of set of non-mutex actions supporting the non-mutex actions supporting the
goalgoal NP-completeNP-complete
– SAT instanceSAT instance in in CNF CNF ►►► support ►►► support problemproblem
CSCLP 2006 Pavel Surynek
Projection consistencyProjection consistency
Interpret support problem as aInterpret support problem as a graph graph Greedily find (vertex disjoint)Greedily find (vertex disjoint) cliques cliques ►►►►►►
►►►►►► clique decompositionclique decomposition At most one action At most one action from each cliquefrom each clique can can
be selectedbe selected
CSCLP 2006 Pavel Surynek
a real support problem
Trucks, Cranes, Locations
Counting argumentCounting argument
CliqueClique decompositiondecomposition C C11, C, C22,..., C,..., Ckk
ContributionContribution of an action of an action a ac(a) = c(a) = number of supported atomsnumber of supported atoms
ContributionContribution of a clique of a clique CCc(C) = maxc(C) = maxaaC C c(a)c(a)
Counting argument Counting argument (simplest form)(simplest form)ifif ∑ ∑i=1...k i=1...k c(Cc(Cii) < size of the goal ►►►) < size of the goal ►►►►►► the goal is ►►► the goal is unsatisfiableunsatisfiable
Generalized form = projection consistencyGeneralized form = projection consistency– w.r.t. sub-goals w.r.t. sub-goals andand singleton approach singleton approach
CSCLP 2006 Pavel Surynek
Application: AI PlanningApplication: AI Planning
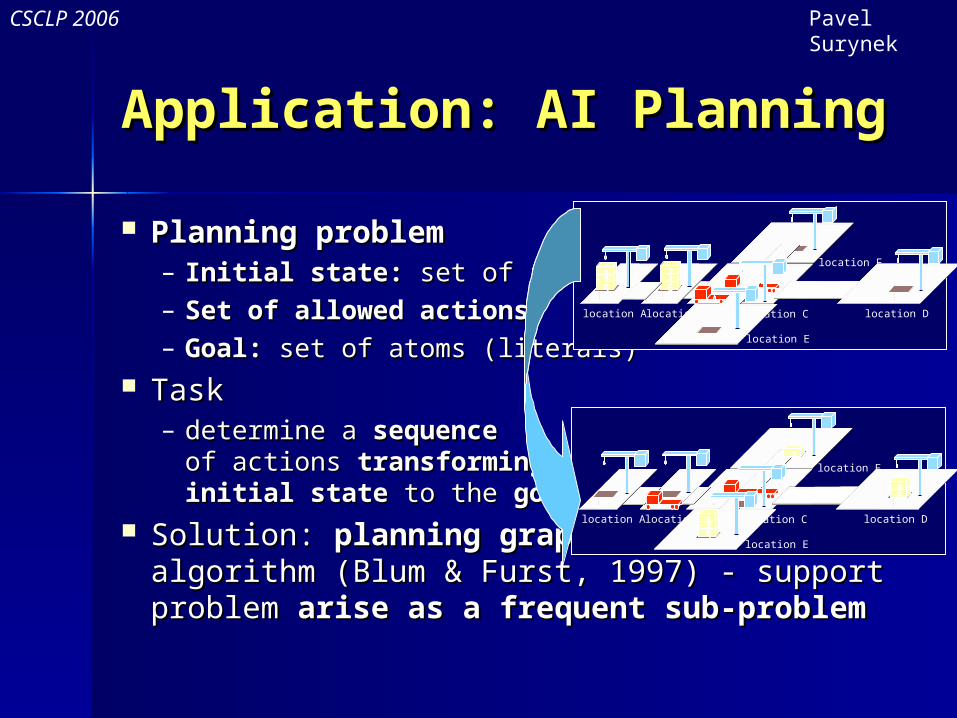
Planning problemPlanning problem– Initial state: Initial state: set of atomsset of atoms– Set of allowed actionsSet of allowed actions– Goal: Goal: set of atoms (literals)set of atoms (literals)
TaskTask– determine a determine a sequencesequence
of actions of actions transformingtransforminginitial stateinitial state to the to the goalgoal
Solution: Solution: planning graphsplanning graphs and and GraphPlanGraphPlan algorithm (Blum & Furst, 1997) - support algorithm (Blum & Furst, 1997) - support problem problem arise as a frequent sub-problemarise as a frequent sub-problem
CSCLP 2006 Pavel Surynek
location B location Clocation A
5 6
location D
location E
location F
31
42
location B location Clocation A
5
location D
location E
location F
31
2
64

Experiments:Experiments: towers of towers of HanoiHanoi
CSCLP 2006 Pavel Surynek
Original puzzle (3 pegs, 4 discs, and 1 hand)
Our generalization (more pegs, discs, and hands)
Experiments:Experiments: DWR DWR
CSCLP 2006 Pavel Surynek
5 631
42
987
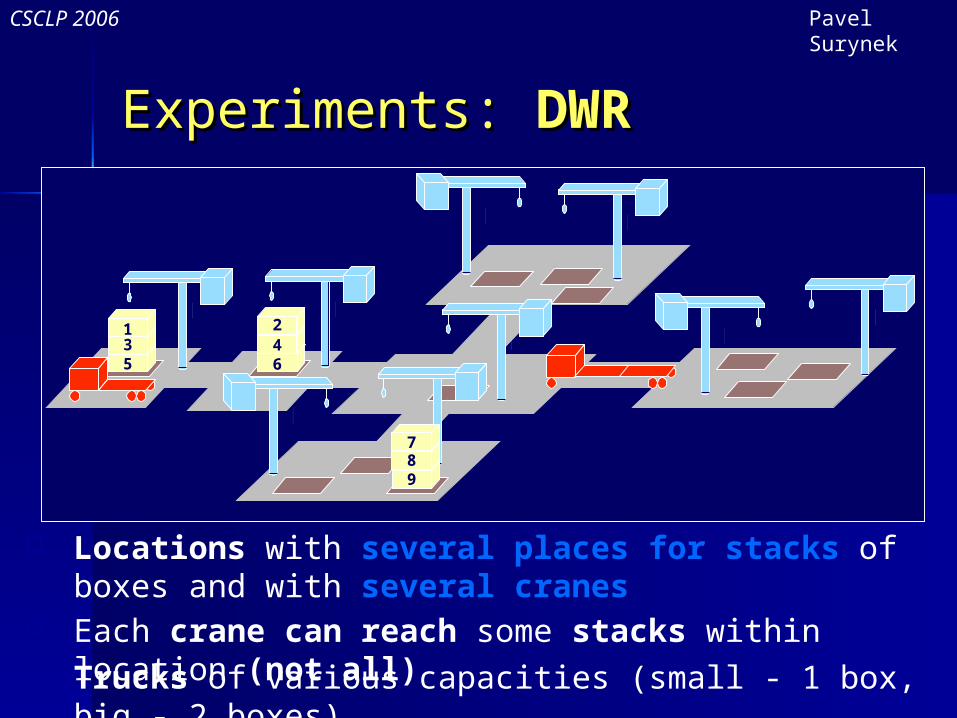
Locations with several places for stacks of boxes and with several cranes
Each crane can reach some stacks within location (not all) Trucks of various capacities (small - 1 box, big - 2 boxes)
Experiments:Experiments: Refueling Refueling planesplanes
CSCLP 2006 Pavel Surynek
distance X
distance Y
distance Z
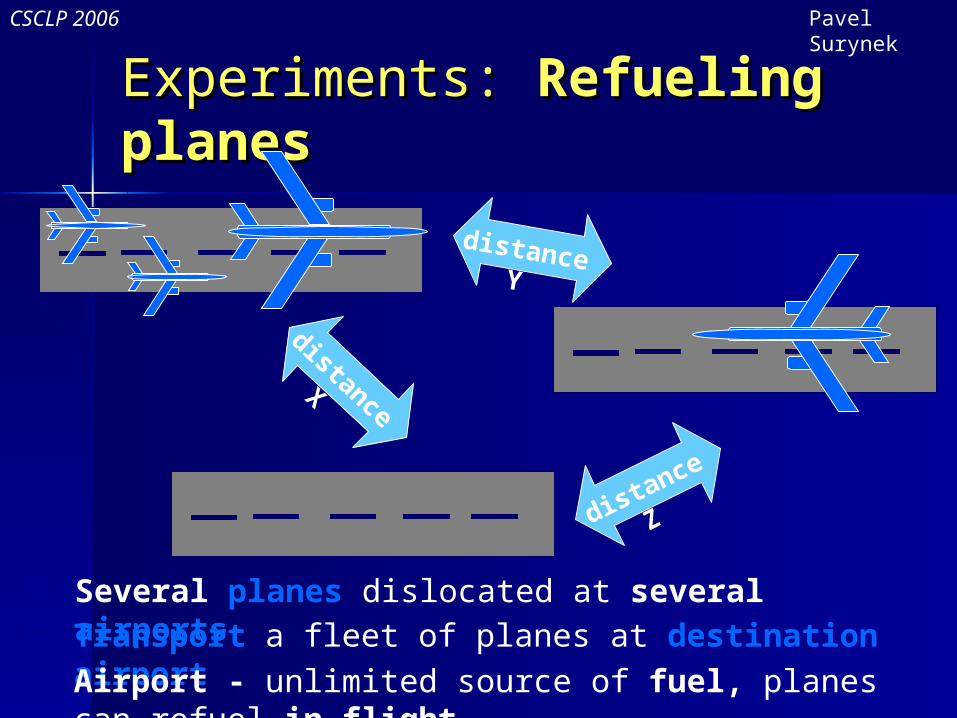
Several planes dislocated at several airports Transport a fleet of planes at destination airport Airport - unlimited source of fuel, planes can refuel in-flight
Experiments:Experiments: Results Results
CSCLP 2006 Pavel Surynek
Total Problem Solv ing Time
0.10
1.00
10.00
100.00
1000.00
10000.00
han0
1
dwr0
3
dwr0
4
han0
2
pln04
dwr0
2
dwr0
1
han0
4
pln01
han0
3
pln10
han0
7
pln05
dwr0
5
pln06
pln11
dwr0
7
han0
8
dwr1
6
pln13
dwr1
7
Tim
e (
se
co
nd
s)
Standard
Arc-consistency
Projection-consistency
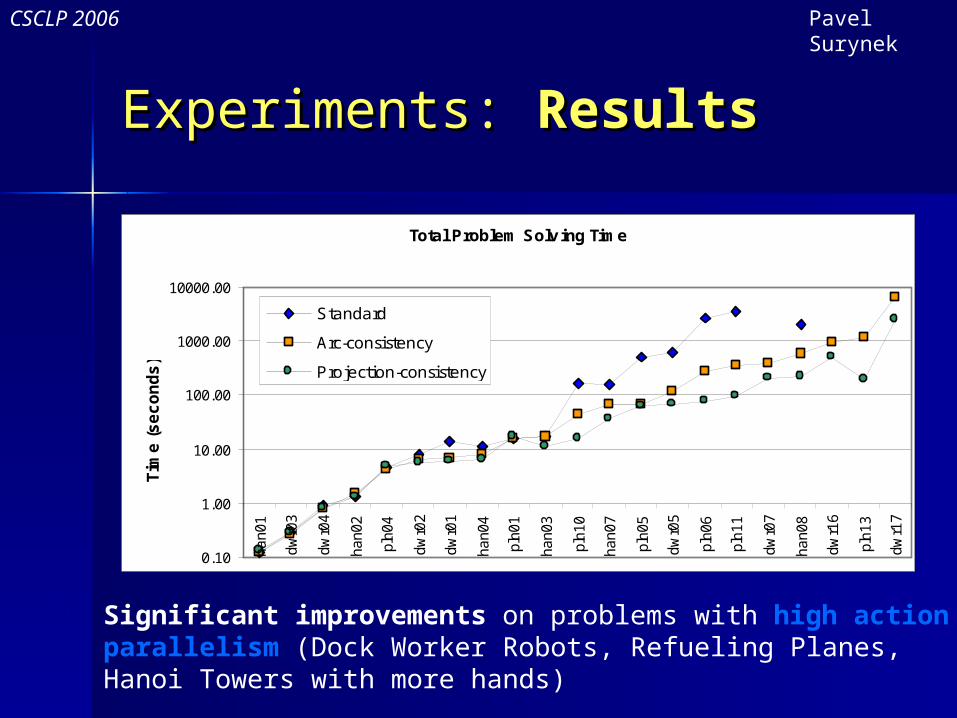
Significant improvements on problems with high action parallelism (Dock Worker Robots, Refueling Planes, Hanoi Towers with more hands)

ConclusionsConclusions
Improvement of the GraphPlan algorithm– Better method for finding mutex free
set of actions supporting a goal– We use projection consistency
Experimental evaluation– Projection consistency especially
successful on problems with high action parallelism
CSCLP 2006 Pavel Surynek