presentazione standard di powerpoint -...
TRANSCRIPT

09/03/2016
1
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 1
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE UNIVERSITA’ DEGLI STUDI DI UDINE
DOTTORATO DI RICERCA IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
MODULE 3 – Laboratories for engineering research
Laboratory Session S6: Experimental identification of dynamic systems
and manufacturing processes
Dr.Ing. G. Totis
09 Marzo 2016 Udine – Polo scientifico
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 2
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Prerequisites
• Fundamentals of system and control theory (dynamic systems, stability, …)
• Fundamentals of discrete and random signals processing
09/03/2016
2
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 3
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
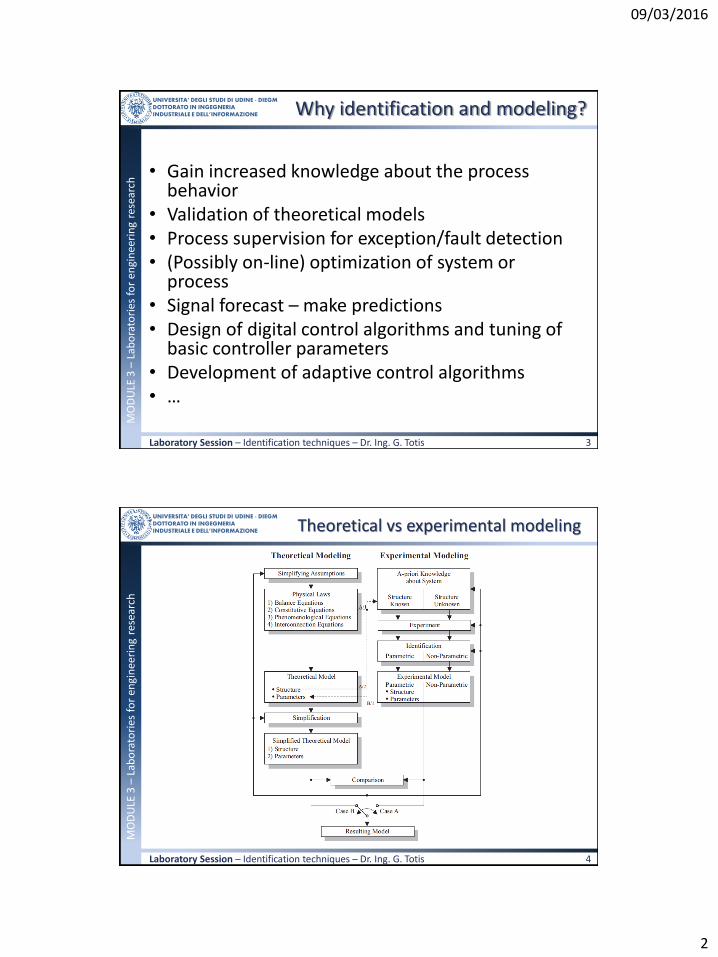
Why identification and modeling?
• Gain increased knowledge about the process behavior
• Validation of theoretical models• Process supervision for exception/fault detection• (Possibly on-line) optimization of system or
process• Signal forecast – make predictions• Design of digital control algorithms and tuning of
basic controller parameters• Development of adaptive control algorithms• …
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 4
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Theoretical vs experimental modeling

09/03/2016
3
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 5
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Model simplification
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 6
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Different kinds of models
09/03/2016
4
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 7
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
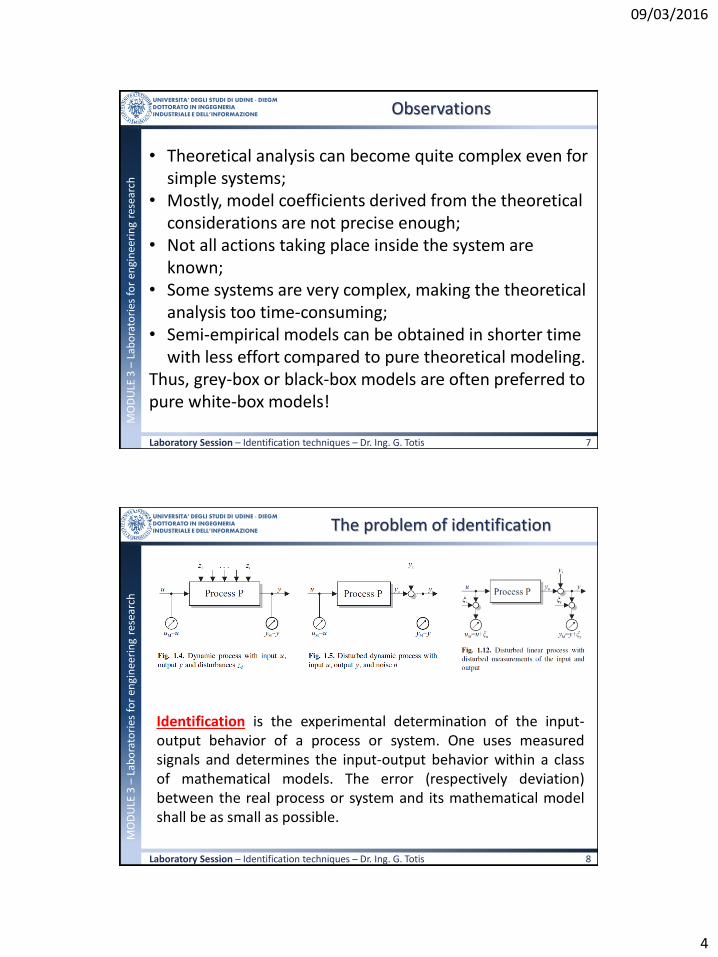
Observations
• Theoretical analysis can become quite complex even for simple systems;
• Mostly, model coefficients derived from the theoretical considerations are not precise enough;
• Not all actions taking place inside the system are known;
• Some systems are very complex, making the theoretical analysis too time-consuming;
• Semi-empirical models can be obtained in shorter time with less effort compared to pure theoretical modeling.
Thus, grey-box or black-box models are often preferred to pure white-box models!
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 8
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
The problem of identification
Identification is the experimental determination of the input-output behavior of a process or system. One uses measuredsignals and determines the input-output behavior within a classof mathematical models. The error (respectively deviation)between the real process or system and its mathematical modelshall be as small as possible.

09/03/2016
5
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 9
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Error calculation
Identification methods can be classified according to the way the error between model and real process is calculated during the identification phase
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 10
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
SIMO, MISO, MIMO systems
For MIMO systems, one has to apply special identification techniques!

09/03/2016
6
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 11
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Identification procedure
Identification methods must be able to determine the input-output behavior under the constraints imposed by• known (adjustable control) inputs• uncontrollable unknown disturbances• uncontrollable but measurable disturbances• process (performance) outputs• other measurable or observable outputs • limited measurement time• confined test input signal amplitude• constrained output signal amplitude• purpose of the identification• available budget.
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 12
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Identification procedure
Then, a priori knowledge must be collected, such as• recently observed behavior of the process, rough
models from previous experiments;• recommended operating conditions for conduction
of measurements;• physical laws governing the process behavior, hints
concerning linear/non-linear behavior time-invariant/time-variant behavior proportional/integral/derivative behavior order of the process (how can you determine it a
priori or from preliminary measurements?).

09/03/2016
7
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 13
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Identification procedure
Now, the measurement can be planned. One has to define• The type of input signals (normal operating signals or
artificial test signals and their shape);• sampling frequency (Shannon theorem!) and measurement
time horizon;• measurements in closed-loop or open-loop operation of the
process, on-line or off-line identification, real-time or not;• necessary equipment (e.g. oscilloscope, PC, ...);• filtering for elimination of noise;• limitations imposed by the actuators (saturation, ...).
Measurements are then executed. Signals are pre-processed and then analyzed. Model is identified and validated by direct comparison with
experimental results and (possibly) with theoretical models. The identification process is iterated if necessary.
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 14
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Identification procedure

09/03/2016
8
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 15
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Classification of identification methods
The different identification methods can be classified according to the following criteria: class of mathematical model class of employed input (test) signals way the error between process and model is
calculated adopted approaches for experimental execution
and data evaluation (online, offline,…) employed algorithms for data processing (e.g.
time or frequency domain) adequacy for SISO, SIMO or MIMO models generated model complexity (SDOF or MDOF).
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 16
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Classes of mathematical models
• Non-parametric vs parametric
• Continuous vs discrete time
• Deterministic and/or stochastic
09/03/2016
9
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 17
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
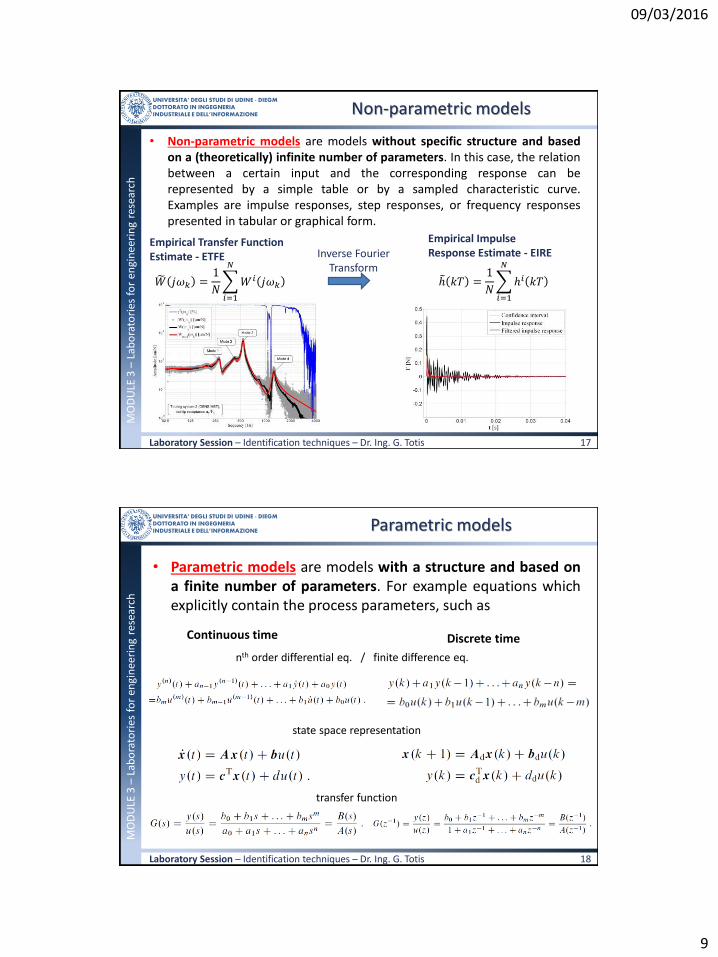
Non-parametric models
• Non-parametric models are models without specific structure and basedon a (theoretically) infinite number of parameters. In this case, the relationbetween a certain input and the corresponding response can berepresented by a simple table or by a sampled characteristic curve.Examples are impulse responses, step responses, or frequency responsespresented in tabular or graphical form.
𝑊 𝑗𝜔𝑘 =1
𝑁
𝑖=1
𝑁
𝑊𝑖 𝑗𝜔𝑘 ℎ 𝑘𝑇 =
1
𝑁
𝑖=1
𝑁
ℎ𝑖 𝑘𝑇
Inverse Fourier Transform
Empirical Transfer Function Estimate - ETFE
Empirical Impulse Response Estimate - EIRE
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 18
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Parametric models
• Parametric models are models with a structure and based ona finite number of parameters. For example equations whichexplicitly contain the process parameters, such as
Continuous time Discrete time
nth order differential eq. / finite difference eq.
state space representation
transfer function

09/03/2016
10
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 19
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Stochastic models
Auto Regressive - AR
Auto Regressive Moving Average -ARMA
Moving Average - MA
ν(k) is white noise (the stochastic term)y(k) is (disturbed) process output u(k) is process (known control) input
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 20
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Deterministic models with stochastic disturbances
Auto Regressive with eXogenous (control) input -ARX
Auto Regressive Moving Average with eXogenous input - ARMAX
Infinite Impulse Response model with output error – IIR+OE
𝑦 𝑘 + 𝑎1𝑦 𝑘 − 1 +⋯+ 𝑎𝑛𝑎𝑦 𝑘 − 𝑛𝑎 =
𝑏1𝑢 𝑘 − 1 +⋯+ 𝑏𝑛𝑏𝑢 𝑘 − 𝑛𝑏 + 𝜐 𝑘
𝑦 𝑘 + 𝑎1𝑦 𝑘 − 1 +⋯+ 𝑎𝑛𝑎𝑦 𝑘 − 𝑛𝑎 =
𝑏1𝑢 𝑘 − 1 +⋯+ 𝑏𝑛𝑏𝑢 𝑘 − 𝑛𝑏 +
+𝜐 𝑘 + 𝑑1𝜐 𝑘 − 1 +⋯+ 𝑑𝑛𝑑𝜐 𝑘 − 𝑛𝑑
𝑤 𝑘 + 𝑎1𝑤 𝑘 − 1 +⋯+ 𝑎𝑛𝑎𝑤 𝑘 − 𝑛𝑎 =
𝑏1𝑢 𝑘 − 1 +⋯+ 𝑏𝑛𝑏𝑢 𝑘 − 𝑛𝑏𝑦 𝑘 = 𝑤 𝑘 + 𝜐 𝑘
Finite time-duration Impulse Response model with output error – FIR+OE
𝑦 𝑘 = 𝑏1𝑢 𝑘 − 1 +⋯+𝑏𝑛𝑏𝑢 𝑘 − 𝑛𝑏 + 𝜐 𝑘

09/03/2016
11
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 21
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Classes of excitation signals
For identification purposes, one can supply the system either with the operational input signals or with artificially created signals (test signals) satisfying the following criteria:
• they should be simple and reproducible (with or without signal generator);
• simple mathematical description of the signal and its properties;
• realizable with the given actuators
• applicable to the process, and goodexcitation of the interesting system dynamics.
They can be
• periodic or non-periodic
• transitory or stationary
• deterministic or stochastic
Overview of some excitation signals. (a) non-periodic: step and square pulse.(b) periodic: sine wave and square
wave. (c) stochastic: discrete binary noiseOther important examples: impulse, chirp
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 22
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Different setups for model identification
Offline identification: the measured data are first stored and are later transferred to the computer utilized for data evaluation and model identification. The algorithm employed is generally based on batch processing (the previously stored measurements will be processed in one shot), and it is non-recursive. It can be further subdivided into: direct processing (model is determined in one pass); iterative processing (model is determined step-
wise, i.e. iteratively and data must be processed multiple times).
Online identification: model identification is performed simultaneously parallelly to the experiment. The computer is coupled with the process and the data points are operated on as they become available.Online identification usually implies real-time processing: data are processed immediately after they become available, which necessitates a direct coupling between the computer and the process. The model is updated and improved as soon as a new measurement becomes available (recursive processing ), until parameters estimates are sufficiently accurate.

09/03/2016
12
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 23
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Overview of identification methods
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 24
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Overview of identification methods
09/03/2016
13
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 25
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
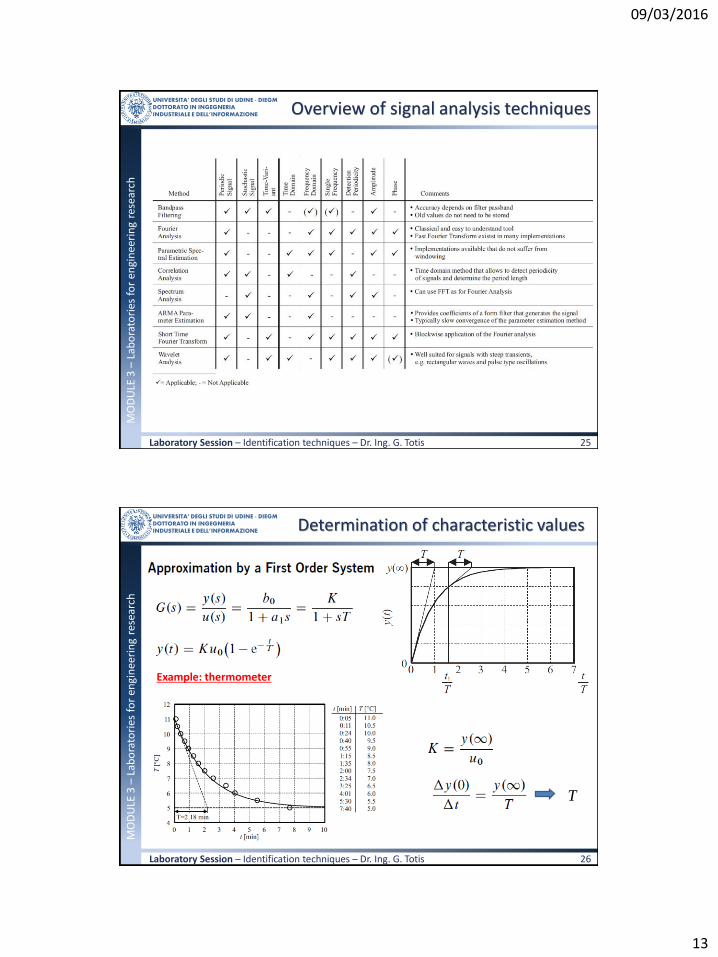
Overview of signal analysis techniques
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 26
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Determination of characteristic values
T
Example: thermometer
09/03/2016
14
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 27
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
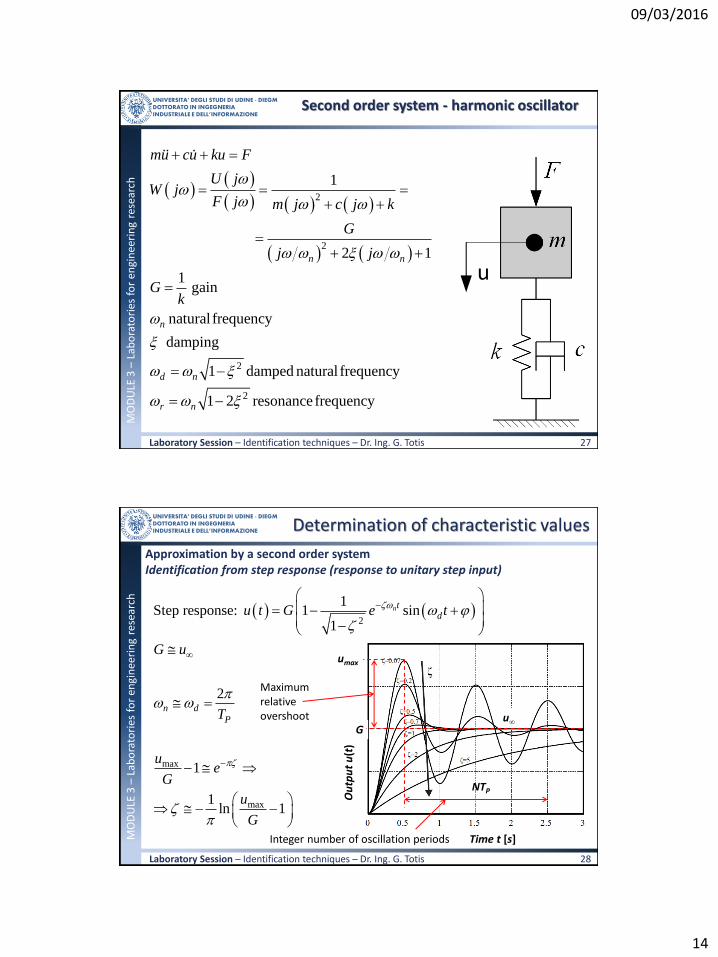
Second order system - harmonic oscillator
u
2
2
2
2
1
2 1
1gain
natural frequency
damping
1 damped natural frequency
1 2 resonancefrequency
n n
n
d n
r n
mu cu ku F
U jW j
F j m j c j k
G
j j
Gk
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 28
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Determination of characteristic values
Approximation by a second order systemIdentification from step response (response to unitary step input)
2
max
max
1Step response: 1 sin
1
2
1
1ln 1
ntd
n d
P
u t G e t
G u
T
ue
G
u
G
Ou
tpu
t u
(t)
umax
G
NTP
u∞
Maximum relative overshoot
Integer number of oscillation periods Time t [s]
09/03/2016
15
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 29
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
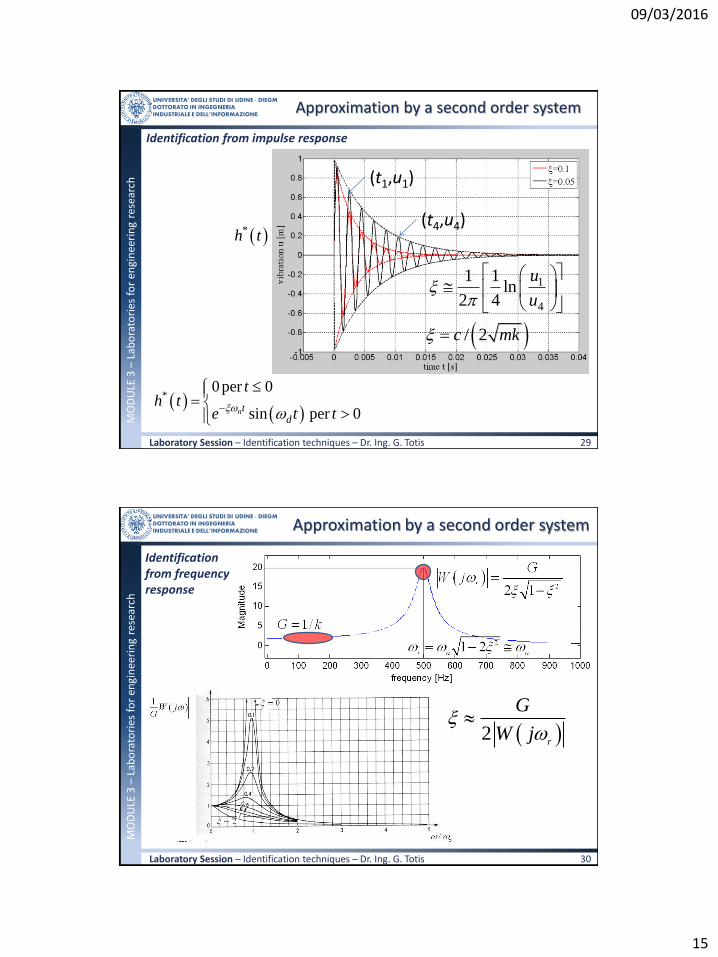
Approximation by a second order system
*0per 0
sin per 0ntd
th t
e t t
*h t
(t1,u1)
(t4,u4)
1
4
1 1ln
2 4
/ 2
u
u
c mk
Identification from impulse response
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 30
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Approximation by a second order system
2r
G
W j
Identification from frequency response

09/03/2016
16
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 31
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Experimental identification
System dynamics are generally unknown. When analyzingelectro-mechanical systems, main approaches forexperimental identification of their frequency response are:
• frequency sweep, based on the application of anelectromagnetic/piezoelectric actuator and other sensors,which excite the system with sinusoidal inputs (with constantor slowly time varying frequency);
• pulse test, based on impact hammer and other sensors,which excite all system harmonics at the same time by meansof an impulsive input.
After measurements and pre-processing, an Empirical TransferFunction Estimate (ETFE) or an Empirical Impulse ResponseEstimate (EIRE) are obtained, which are the main (non-parametric) inputs for mathematical interpolation withparametric models.
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 32
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Frequency sweep

09/03/2016
17
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 33
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Example: internal turningM
OD
ULE
3 –
Lab
ora
tori
es f
or
engi
nee
rin
g re
sear
ch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 34
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Pulse test on tooling system

09/03/2016
18
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 35
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Pulse test on tooling system
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 36
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE ETFEBoring bar made of steel (Young modulus E=210 Gpa, density ρ=7.87g/cm3), diameter D=16 mm, apsect ratio, L/D=6.5.
250 500 1000 20000.01
0.1
1
10
100
X: 1507
Y: 90
frequency [Hz]
Am
pli
tude [
m/N
]
62.5 125 250 500 1000 2000
-180
0
frequency [Hz]
Phase
[deg]
0.8
830
0.013
n r
mG
N
Hz
Modal parameters from ETFE:
09/03/2016
19
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 37
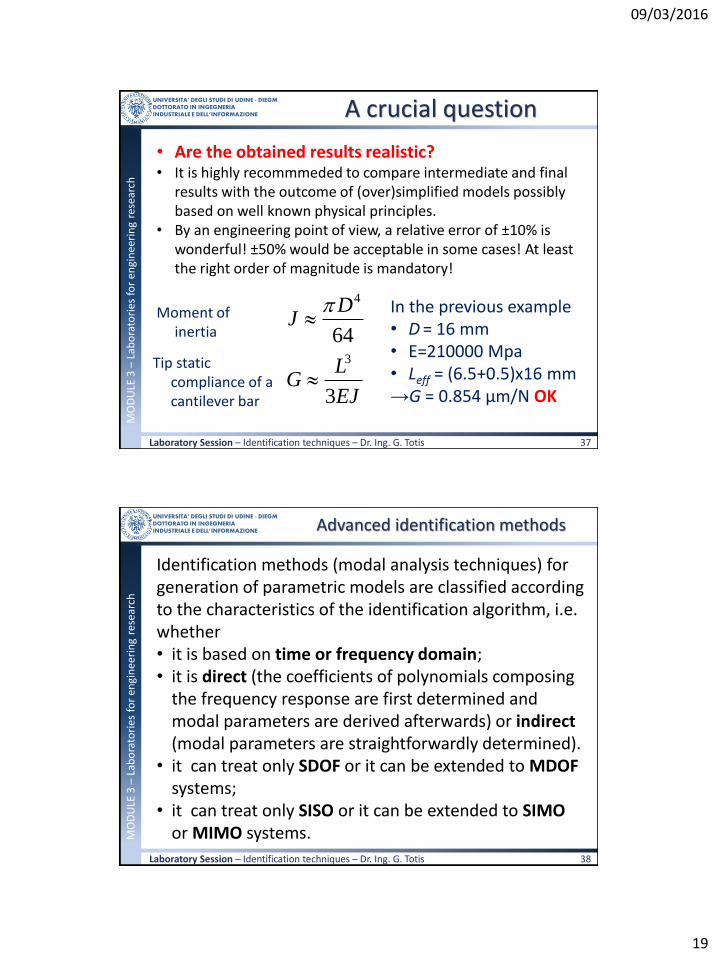
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE A crucial question
• Are the obtained results realistic?• It is highly recommmeded to compare intermediate and final
results with the outcome of (over)simplified models possibly based on well known physical principles.
• By an engineering point of view, a relative error of ±10% is wonderful! ±50% would be acceptable in some cases! At least the right order of magnitude is mandatory!
4
3
64
3
DJ
LG
EJ
Moment of inertia
Tip static compliance of a cantilever bar
In the previous example• D = 16 mm• E=210000 Mpa• Leff = (6.5+0.5)x16 mm→G = 0.854 μm/N OK
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 38
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Advanced identification methods
Identification methods (modal analysis techniques) for generation of parametric models are classified according to the characteristics of the identification algorithm, i.e. whether• it is based on time or frequency domain;• it is direct (the coefficients of polynomials composing
the frequency response are first determined and modal parameters are derived afterwards) or indirect(modal parameters are straightforwardly determined).
• it can treat only SDOF or it can be extended to MDOFsystems;
• it can treat only SISO or it can be extended to SIMOor MIMO systems.

09/03/2016
20
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 39
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Main techniques for SISO-MDOF systems
• Linear Least Squares Method in the Frequency Domain (~Zobel, Levy)
• Linear Least Squares Method in the Time Domain (~Prony, typical for IIE+OE or ARX models)
• Least Squares Complex Exponential Method (Time domain)
• Ibrahim Time Domain Method (SIMO) or Single Station Time Domain (SISO)
• Inverse Method (Ewins, Kennedy-Pancu)
• …
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 40
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Linear Least Squares Method in the Frequency Domain
Cost function to minimize

09/03/2016
21
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 41
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Linear Least Squares Method in the Frequency Domain
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 42
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Linear Least Squares Method in the Frequency Domain
unknown parameter vector
09/03/2016
22
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 43
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
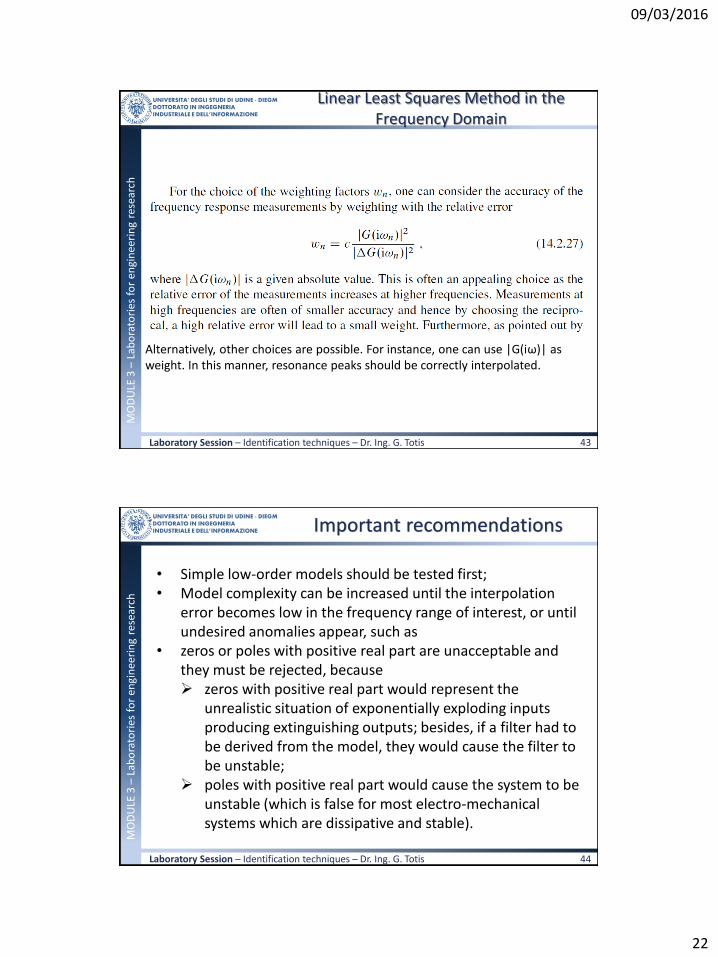
Linear Least Squares Method in the Frequency Domain
Alternatively, other choices are possible. For instance, one can use |G(iω)| as weight. In this manner, resonance peaks should be correctly interpolated.
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 44
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Important recommendations
• Simple low-order models should be tested first;• Model complexity can be increased until the interpolation
error becomes low in the frequency range of interest, or until undesired anomalies appear, such as
• zeros or poles with positive real part are unacceptable and they must be rejected, because zeros with positive real part would represent the
unrealistic situation of exponentially exploding inputs producing extinguishing outputs; besides, if a filter had to be derived from the model, they would cause the filter to be unstable;
poles with positive real part would cause the system to be unstable (which is false for most electro-mechanical systems which are dissipative and stable).
09/03/2016
23
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 45
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
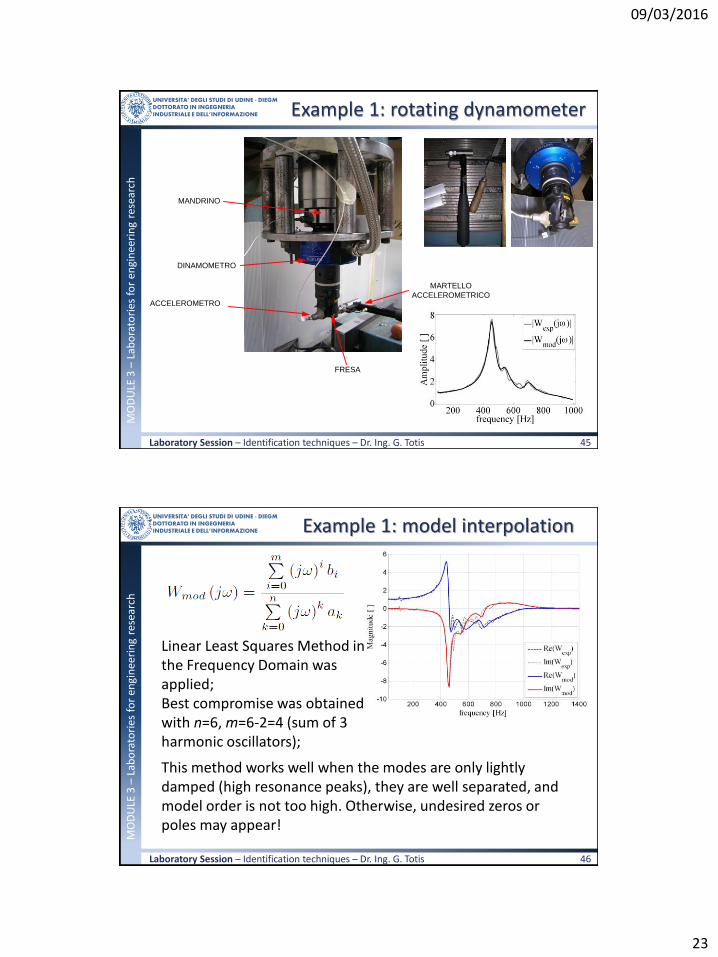
MARTELLO
ACCELEROMETRICO
DINAMOMETRO
FRESA
MANDRINO
ACCELEROMETRO
Example 1: rotating dynamometer
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 46
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Example 1: model interpolation
Linear Least Squares Method in the Frequency Domain was applied;Best compromise was obtained with n=6, m=6-2=4 (sum of 3 harmonic oscillators);
This method works well when the modes are only lightly damped (high resonance peaks), they are well separated, and model order is not too high. Otherwise, undesired zeros or poles may appear!

09/03/2016
24
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 47
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Example 1: filter construction
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 48
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Example 1: filter application

09/03/2016
25
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 49
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
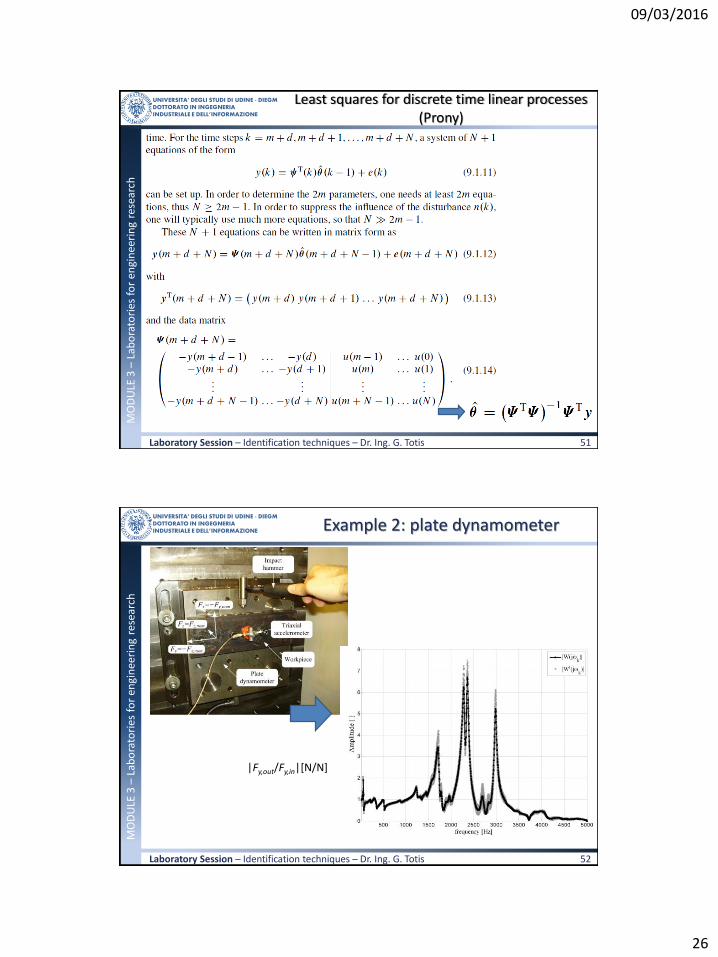
Least squares for discrete time linear processes (Prony)
IIR+OE modelor ARX
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 50
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Least squares for discrete time linear processes (Prony)
09/03/2016
26
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 51
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Least squares for discrete time linear processes (Prony)
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 52
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Example 2: plate dynamometer
|Fy,out/Fy,in|[N/N]

09/03/2016
27
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 53
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Example 2: model interpolation
• After trial and error, best result (without anomalies) was obtained with 32 poles and 31 zeros. However, it is still not satisfactory. Interpolation is poor. Moreover, it resembles to a pure mathematical interpolation of transfer function shape, without grasping the underlying physical structure of the dynamic system.
• This method is not suitable for modeling complicated dynamic systems composed of several vibration modes. Low-frequency resonances are not correctly recognized, especially when high-frequency energetic resonances are present, which tend to hide the effect of the former ones.
• One reason of this failure is that the system is ill conditioned.
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 54
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Least Squares Complex Exponential Method
• It is an improvement of the Prony method• Main steps:
1. a system of discrete time equations is expressed in matrix form, whence the transfer function denominator coefficients ai (i=1,..,2N) are determined by linear regression;
2. natural pulsation and damping of each of the N modes are extracted from such coefficients;
3. a new system of discrete time equations is obtained, in order to derive mode gains Gi.
• This approach is more effective than the Prony method; poles are first identified by expoliting their good signal to noise ratio; gains are determined afterwards; eventually zeros are derived as a consequence of modes sum.
• Disadvantages: it is not possible to separate the effect of low and high-frequency modes from the effect of middle-frequency modes which are of main interest; a good compromise would be to apply the Least Squares Method in Frequency Domain only to determine mode gains.

09/03/2016
28
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 55
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Single Station Time Domain Method
• Improvement of Prony method• Main steps:
– System of discrete time equations is expressed in matrix form, by shifting the exponential modes composing the impulse response of a wide time span
– Modal parameters are determined– The method is iterated and the results are evaluated through
the Modal Confidence Factor approach, in order to distinguish structural modes (good, true modes) from computational modes (ghosts arising from pure shape interpolation).
• Advantages: this method is quite effective for the detection of closely spaced modes; the verification of results robustness is implicit in the algorithm
• Disadvantages: it is rather complicated, it has the tendency to give nonconservative damping estimates with noisy data.
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 56
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Inverse method (Ewins)It is based on the assumption of the following model structure
𝑊𝑚𝑜𝑑 𝑗𝜔 ≅ −𝐴𝐿𝜔2 +
𝑘=ℎ1
ℎ2𝑅𝑘
𝑗𝜔 2 + 2𝜉𝑘 𝑗𝜔 + 𝜔𝑛,𝑘2 +
𝐺𝐻
𝑗𝜔 𝜔𝑛,𝐻2+ 2𝜉𝐻 𝑗𝜔 𝜔𝑛,𝐻 + 1
𝜔𝐿 < 𝜔 < 𝜔𝐻
Frequency range is split into 3 regions (Low-frequency, Medium freqeuency –that of interest and High Frequency). Thus,
The identification procedure is based on this assumption: each resonance peak is highly influenced by the corresponding mode, whereas other modes give only a constant contribution, i.e.

09/03/2016
29
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 57
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Inverse method (Ewins)
1. Each mode should be preliminarly identified by hand or by using another method, such as the peak picking technique)
2. For each mode, modal parameters (Rk, ξk, ωn,k) are estimated (for algebraic details see [Ewins])
3. The other unknown coefficients AL and GH are also estimated by regression.
General remarks on the method:• It is very effective, except for highly damped modes or for very close
resonances. • The main advantage of this approach is that a realizable (causal) and stable
model transfer function is obtained, with a minimum number of poles and zeros with negative real part.
• This is a direct consequence of the assumed model structure. In this case, poles are easily identified from their resonance peaks, whereas zeros are automatically determined from the sum of the previously identified modes. This way, zeros detection is not influenced by the bad signal to noise ratio affecting the frequency ranges where zeros are located.
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 58
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE Example 2: plate dynamometer
OK!
OK!
(Here the Inverse Method was applied)
09/03/2016
30
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 59
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
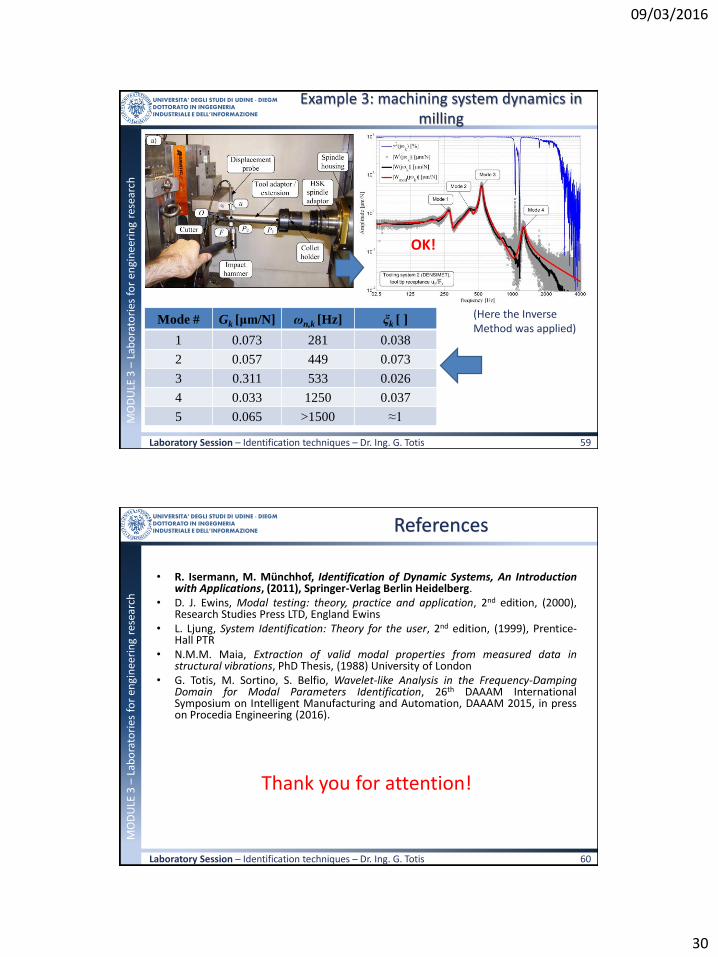
Example 3: machining system dynamics in milling
Mode # Gk [μm/N] ωn,k [Hz] ξk [ ]
1 0.073 281 0.038
2 0.057 449 0.073
3 0.311 533 0.026
4 0.033 1250 0.037
5 0.065 >1500 ≈1
OK!
(Here the Inverse Method was applied)
UNIVERSITA’ DEGLI STUDI DI UDINE - DIEGM DOTTORATO IN INGEGNERIA INDUSTRIALE E DELL’INFORMAZIONE
Laboratory Session – Identification techniques – Dr. Ing. G. Totis 60
MO
DU
LE 3
–La
bo
rato
ries
fo
r en
gin
eeri
ng
rese
arch
References
• R. Isermann, M. Münchhof, Identification of Dynamic Systems, An Introductionwith Applications, (2011), Springer-Verlag Berlin Heidelberg.
• D. J. Ewins, Modal testing: theory, practice and application, 2nd edition, (2000),Research Studies Press LTD, England Ewins
• L. Ljung, System Identification: Theory for the user, 2nd edition, (1999), Prentice-Hall PTR
• N.M.M. Maia, Extraction of valid modal properties from measured data instructural vibrations, PhD Thesis, (1988) University of London
• G. Totis, M. Sortino, S. Belfio, Wavelet-like Analysis in the Frequency-DampingDomain for Modal Parameters Identification, 26th DAAAM InternationalSymposium on Intelligent Manufacturing and Automation, DAAAM 2015, in presson Procedia Engineering (2016).
Thank you for attention!