pittsburgh section bulletin - ieeeieee pittsburgh section bulletin, august 2011 volume 60 no. 8 page...
TRANSCRIPT
IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 1 of 14
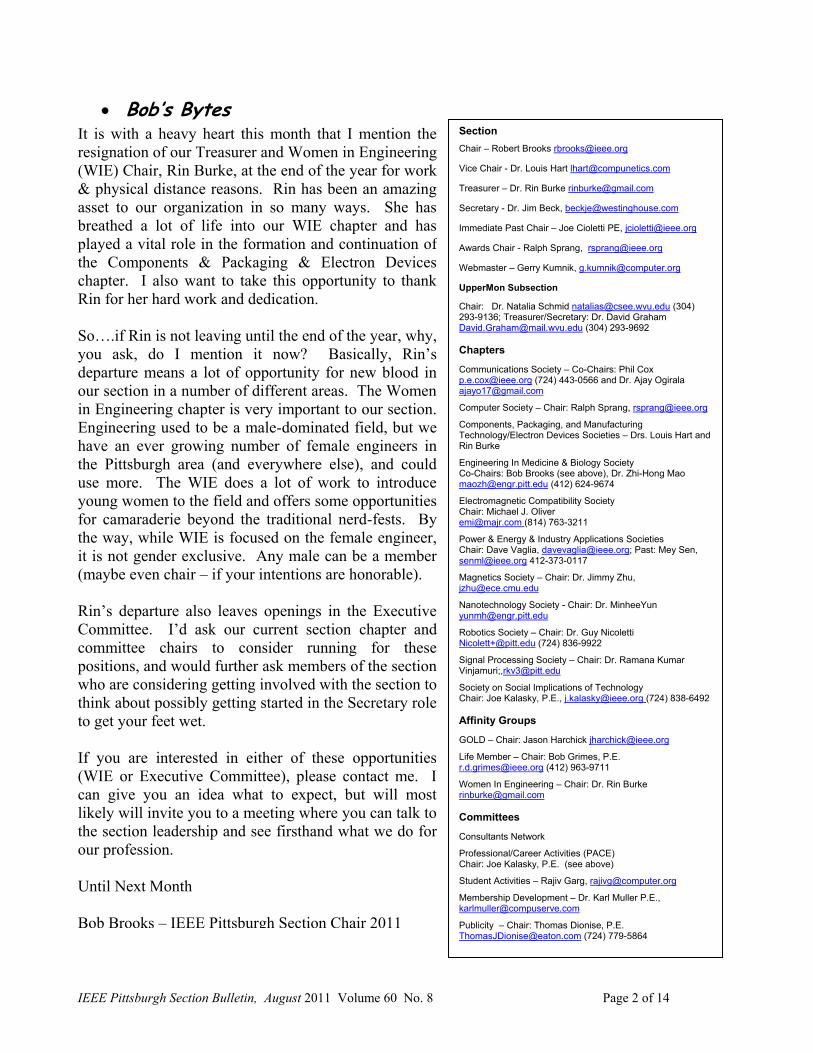
Pittsburgh Section
Bulletin August 2011 Volume 60, No. 8
Included in this issue:
Bob’s Bytes ................................................................................................................................................. 2
Advanced Nanostructured Materials for Energy Applications: Optical Thin Films for High Temperature Gas Sensing and Magnetic Nanocomposites for High Frequency Power Electronics 3
Practical Arc Flash Reduction ................................................................................................................ 4
Section Picnic – Sept. 10 – Boyce Park (Commissioner’s Grove) ..................................................... 5
Wireless Communications Certification Exam ................................................................................... 5
Robotics & Automation: Research – Development – Applications .................................................. 7
Editor: Philip Cox, [email protected]; Contributors: Bob Brooks, Guy Nicoletti, Mike Oliver, Mey Sen, and
Dave Vaglia
All announcements for publication in a particular month’s bulletin are due to the Editor by the 20th of the
previous month. The accuracy of the published material is not guaranteed. If there is any error, please bring it
to the Editor’s attention. The Section’s web site www.ewh.ieee.org/r2/pittsburgh has past issues of the bulletin
and lots of other useful information
IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 2 of 14
Bob’s Bytes
It is with a heavy heart this month that I mention the
resignation of our Treasurer and Women in Engineering
(WIE) Chair, Rin Burke, at the end of the year for work
& physical distance reasons. Rin has been an amazing
asset to our organization in so many ways. She has
breathed a lot of life into our WIE chapter and has
played a vital role in the formation and continuation of
the Components & Packaging & Electron Devices
chapter. I also want to take this opportunity to thank
Rin for her hard work and dedication.
So….if Rin is not leaving until the end of the year, why,
you ask, do I mention it now? Basically, Rin’s
departure means a lot of opportunity for new blood in
our section in a number of different areas. The Women
in Engineering chapter is very important to our section.
Engineering used to be a male-dominated field, but we
have an ever growing number of female engineers in
the Pittsburgh area (and everywhere else), and could
use more. The WIE does a lot of work to introduce
young women to the field and offers some opportunities
for camaraderie beyond the traditional nerd-fests. By
the way, while WIE is focused on the female engineer,
it is not gender exclusive. Any male can be a member
(maybe even chair – if your intentions are honorable).
Rin’s departure also leaves openings in the Executive
Committee. I’d ask our current section chapter and
committee chairs to consider running for these
positions, and would further ask members of the section
who are considering getting involved with the section to
think about possibly getting started in the Secretary role
to get your feet wet.
If you are interested in either of these opportunities
(WIE or Executive Committee), please contact me. I
can give you an idea what to expect, but will most
likely will invite you to a meeting where you can talk to
the section leadership and see firsthand what we do for
our profession.
Until Next Month
Bob Brooks – IEEE Pittsburgh Section Chair 2011
Section
Chair – Robert Brooks [email protected]
Vice Chair - Dr. Louis Hart [email protected]
Treasurer – Dr. Rin Burke [email protected]
Secretary - Dr. Jim Beck, [email protected]
Immediate Past Chair – Joe Cioletti PE, [email protected]
Awards Chair - Ralph Sprang, [email protected]
Webmaster – Gerry Kumnik, [email protected]
UpperMon Subsection
Chair: Dr. Natalia Schmid [email protected] (304) 293-9136; Treasurer/Secretary: Dr. David Graham [email protected] (304) 293-9692
Chapters
Communications Society – Co-Chairs: Phil Cox [email protected] (724) 443-0566 and Dr. Ajay Ogirala [email protected]
Computer Society – Chair: Ralph Sprang, [email protected]
Components, Packaging, and Manufacturing Technology/Electron Devices Societies – Drs. Louis Hart and Rin Burke
Engineering In Medicine & Biology Society Co-Chairs: Bob Brooks (see above), Dr. Zhi-Hong Mao [email protected] (412) 624-9674
Electromagnetic Compatibility Society Chair: Michael J. Oliver [email protected] (814) 763-3211
Power & Energy & Industry Applications Societies Chair: Dave Vaglia, [email protected]; Past: Mey Sen, [email protected] 412-373-0117
Magnetics Society – Chair: Dr. Jimmy Zhu, [email protected]
Nanotechnology Society - Chair: Dr. MinheeYun [email protected]
Robotics Society – Chair: Dr. Guy Nicoletti [email protected] (724) 836-9922
Signal Processing Society – Chair: Dr. Ramana Kumar Vinjamuri;,[email protected]
Society on Social Implications of Technology Chair: Joe Kalasky, P.E., [email protected] (724) 838-6492
Affinity Groups
GOLD – Chair: Jason Harchick [email protected]
Life Member – Chair: Bob Grimes, P.E. [email protected] (412) 963-9711
Women In Engineering – Chair: Dr. Rin Burke [email protected]
Committees
Consultants Network
Professional/Career Activities (PACE) Chair: Joe Kalasky, P.E. (see above)
Student Activities – Rajiv Garg, [email protected]
Membership Development – Dr. Karl Muller P.E., [email protected]
Publicity – Chair: Thomas Dionise, P.E. [email protected] (724) 779-5864

IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 3 of 14
Advanced Nanostructured Materials for Energy Applications: Optical Thin Films for High Temperature Gas Sensing and
Magnetic Nanocomposites for High Frequency Power Electronics
Speaker: Paul R. Ohodnicki, Jr., Chemistry and Surface Division, National Energy Technology
Laboratory
Date: August 11, 2011
Time: Social 6:30 PM, Program 7:00 PM
Place: Westinghouse Energy Center
RSVP: by August 8, 2011 to:
Dr. Rin Burke, [email protected] or 814-397-7058 - or-
Mike Oliver, [email protected] or 814-573-2812
Organizers: IEEE Women in Engineering (WIE), Affinity Group -and-
Electromagnetic Compatibility Society (EMCS)
Abstract Advanced nanostructured materials are playing an increasingly important role in a wide
range of energy related applications including catalysts for fossil energy generation, semiconductor
and metallic nanostructures for solar energy generation and energy efficiency, advanced energy
storage and batteries, and higher frequency power electronics for grid-scale power conditioning and
grid integration. Research at the National Energy Technology Laboratory (NETL) is targeted towards
improving energy efficiency and reducing greenhouse gas emissions through development of the next
generation of advanced fossil energy technologies for large-scale centralized power plants including
coal gasification, oxy-fuel combustion, solid oxide fuel cells, gas turbines, and CO2 capture and
sequestration. This talk will focus on two areas in which nanostructured materials play an important
role in areas of interest to NETL’s core mission: (1) Advanced high temperature gas sensor materials
for fossil energy process monitoring and control and (2) Magnetic nanocomposites for grid integration
of fuel cells in high frequency power conditioning systems.
Speaker: Paul Ohodnicki received his PhD from the Materials
Science and Engineering Department at Carnegie Mellon University
in 2008. He also holds Bachelor’s degrees in Engineering Physics
and Economics from the University of Pittsburgh. At Carnegie
Mellon University, Paul studied the effects of thermal processing of
Fe,Co-based magnetic nanocomposite inductor materials in the
presence of an applied magnetic field to tailor the magnetization
response for current sensing and high frequency power. He
subsequently spent approximately 2 years as a visiting research
scientist at PPG Industries working on optical thin film coatings for
solar energy generation and energy efficiency applications. During
his tenure, a novel solar control coating for improved energy
efficiency commercial windows (Solarban Reflective 100) was
patented and commercialized. After a brief stay as a Federal Project
Manager for the Solid State Energy Conversion Alliance (SECA)
program at the National Energy Technology Laboratory, Paul

IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 4 of 14
transferred to his current position as a Materials Scientist in the Chemistry and Surface Science
Division. His current research interests include the design, synthesis, and characterization of
nanostructured optical, electronic, and magnetic thin film materials systems for advanced fossil and
other energy-related applications
DIRECTIONS TO WESTINGHOUSE ENERGY CENTER
From Pittsburgh take Interstate 376 East (Parkway East). Take Exit 84A to Monroeville. Cross
Business Rt 22 at the traffic light and proceed on Rt 48 South (Moss Side Blvd) approx ½ mile (two
traffic lights). The 2nd
traffic light is at a 4-way intersection with an Exxon station on the right. Turn
left onto Northern Pike. Proceed approx 0.2 miles and turn right at the 1st traffic light onto
Westinghouse Dr. Travel 0.7 miles (past the guard stand) to the 3 flags where the building’s main
entrance is located. Parking in the evening will be plentiful. Use the main entrance and check with the
security guards inside. You will be directed to the proper room for your meeting.
From the PA Turnpike, take Exit 57 (Monroeville). After the toll plaza, get in the left lane to
get on Business Rt 22 West. At the first light, turn left onto Rt 48 South (Moss Side Blvd) and follow
the above directions.
Practical Arc Flash Reduction
Speaker: Bill Vilcheck P.E.
Date: Wednesday, August 24, 2011
Time: Social 6:30 PM, Program 7:00 PM
Location: Westinghouse Cranberry Woods Headquarters, Building 1 (Center Building)
RSVP: Required to Dave Vaglia, P.E. ([email protected]) by August 20, 2011 with each
attendee’s Name, Affiliation, email, and phone number. If you would like to receive
PDH, please bring a copy of this announcement for verification of your attendance. A
non-Member who would like to receive PDH is required to pay $10 to IEEE Pittsburgh
Section. A Member who would like to receive PDH is required to show membership
ID.
Sponsors: Power & Energy Society/Industrial Applications Society
Abstract: Industrial and commercial facilities have recognized that arc flash prevention is a part of a
complete safety program. Quantification of the arc flash hazard level and labeling procedures are a
major portion of this effort. When calculating the incident energy, the engineer must deal with two
main issues in addition to the burn hazard: blast pressure effect on the human body and worker
comfort or mobility with multilayer flash suits and associated flame-resistant (FR) protective
equipment. For work tasks where blast pressures and burn injuries may be lethal, reducing the energy
exposure to the worker is imperative. This can be achieved with either a change to the work method
or by engineering design. The presentation will describe the arc flash blast and discuss methods to
improve worker safety.
Speaker: Bill Vilcheck received his BSEE and MSEE from West Virginia University and has been
employed as a power systems engineer since 1975. He joined Eaton Corporation in 1998. As
Principal Engineer, he has been involved in all Power Systems Engineering activities and continues to
IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 5 of 14
focus upon power quality engineering, energy management, electrical safety, and smart grid
technologies. Mr. Vilcheck is an Adjunct Professor at the University of Pittsburgh and also is a senior
member of IEEE and member of the Pulp and Paper Industry Committee. He is a Professional
Engineer registered in Pennsylvania and West Virginia and co-author of several technical papers.
Directions: Take 79 North to the route 228 east exit. Stay in right lane and drive by Marriott Hotel (on
right). Turn right into Cranberry Woods facility and stay in left lane. Make first left into Westinghouse
Headquarters and drive straight through roundabout. Park in visitors parking places that are located on
either side of the entry road.
Section Picnic – Sept. 10 – Boyce Park (Commissioner’s Grove) Join us for a catered picnic lunch and activities such as Extreme Frisbee, water balloon toss, and egg
throwing contest.
Date: Saturday, September 10, 2011
Time: Noon – ? PM
Place: 675 Old Frankstown Road, Pittsburgh, PA 15239 (office). Commissioners Grove is about ¼ mile
from the office on your left. Please see #30 on the Boyce Park map at:
http://www.county.allegheny.pa.us/parks/maps/bpmap.pdf
Cost: No charge
RSVP: Required, to make sure there is enough food, to Mey Sen, email: [email protected] by 9/3.
DIRECTIONS TO COMMISSIONER’S GROVE
From Pittsburgh take I-376 East (Parkway East). Take Exit 84B to Plum. Cross Old William
Penn Highway at the traffic light. Cross Beaty Road at the STOP sign. Bear Right and turn right at the
next STOP sign to be on Center Road. After crossing over PA Turnpike (within a mile), look for Old
Frankstown Road on your right. Follow the direction mentioned above.
Wireless Communications Certification Exam
IEEE WCET® Certification Exam Applications Accepted for
Testing Period to be Held 2 – 29 October 2011
Virtual One-Day Course Highlights
“LTE for the Wireless Engineering Practitioner” on August 3
The IEEE Communications Society will hold the next IEEE Wireless Communication Engineering
Technologies (IEEE WCET®) Certification Exam from 2 – 29 October 2011 at Prometric testing
centers located worldwide. Eligible candidates are invited to visit www.ieee-wcet.org to learn about
IEEE Wireless Communications Professional® (IEEE WCP) credential benefits and program news,
gain access to the latest resource material, and complete registration applications, which are due by 16
September 2011.
IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 6 of 14
As part of its continuing effort to expand the overall knowledge of wireless communications
professionals, ComSoc Training is offering a one-day virtual course dedicated to the evolution of
wireless communications technology and emerging IP networks on Wednesday, 3 August 2011. “LTE
for the Wireless Engineering Practitioner: Fundamentals & Applications” taught by Daniel Wong,
president of Daniel Wireless, LLC, will focus on end-to-end LTE systems including access networks,
wireless service architectures and policies, anticipated network management changes and the
implications of moving toward all IP-based networks.
The full-day course is available to IEEE/ComSoc members for $225 and to non-members for $275.
Individuals who complete the course will be awarded 0.6 IEEE Continuing Education Units.
Registration ends 27 July 2011. For more information visit www.comsoc.org/training.
In addition, IEEE ComSoc has also announced details for its next five-day “Virtual Intensive Course
on Wireless Communications” to be held 22-26 August 2011. Recommended for professionals with an
engineering or technology background as well as individuals with an appreciation for wireless
engineering practices, this course is specifically designed to provide a comprehensive overview of
network operations, the latest technological implementations and how different facets of wireless
communications fit into overall system designs. Visit www.comsoc.org/training for additional up-to-
date course and registration information.
“The IEEE WCET® Spring 2011 examination period was the most successful in the program’s history
and included numerous international candidates from nations ranging from the United States and
Canada to Israel, Taiwan and South Africa,” says Celia Desmond, IEEE WCET program director and
steering committee chairperson. “Recognized worldwide for its ability to enable practitioners to
demonstrate their thorough understanding of key wireless technologies from a global perspective, this
program is now firmly embedded as a powerful tool for furthering career development and supporting
an industry that continues to grow exponentially with the introduction of fast networks, smartphones,
and 4G mobile and broadband applications.”
To earn the IEEE WCP credential, individuals must pass the comprehensive IEEE WCET
examination, which is composed of 150 multiple choice questions and offered via computer at testing
centers worldwide. IEEE ComSoc recommends that candidates have a degree from an accredited
college or university and three or more years of graduate-level educational or professional wireless
communication engineering experience in order to be adequately prepared for the exam.
The US$500 fee ($450 for IEEE and IEEE ComSoc members) covers the application, processing
charges and “seat fee” for taking the test. In addition, a 75-question practice exam can be purchased
online by communications professionals who would like to gauge their preparedness for the official
exam prior to the next testing period.
For more information on the IEEE WCET program or to obtain the latest edition of The Wireless
Communications Professional® e-newsletter and/or a free copy of the Candidate’s Handbook please
visit www.ieee-wcet.org. Additional program details can be obtained from Marilyn Catis at
[email protected]. Visitors to the IEEE WCET website will also be afforded the ability to reach out
to global colleagues and peers as well as learn about the latest IEEE WCET Program initiatives
through the program’s LinkedIn, Facebook and Twitter pages.
IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 7 of 14
Robotics & Automation: Research – Development – Applications
Fundamentals of Robot Kinematics
Part IV
(Continued from Part I)
Guy M. Nicoletti, MS, Ph.D., IEEE LM
Assoc. Prof. Emeritus, Engineering
University of Pittsburgh at Greensburg, Greensburg Pa
[email protected], [email protected]
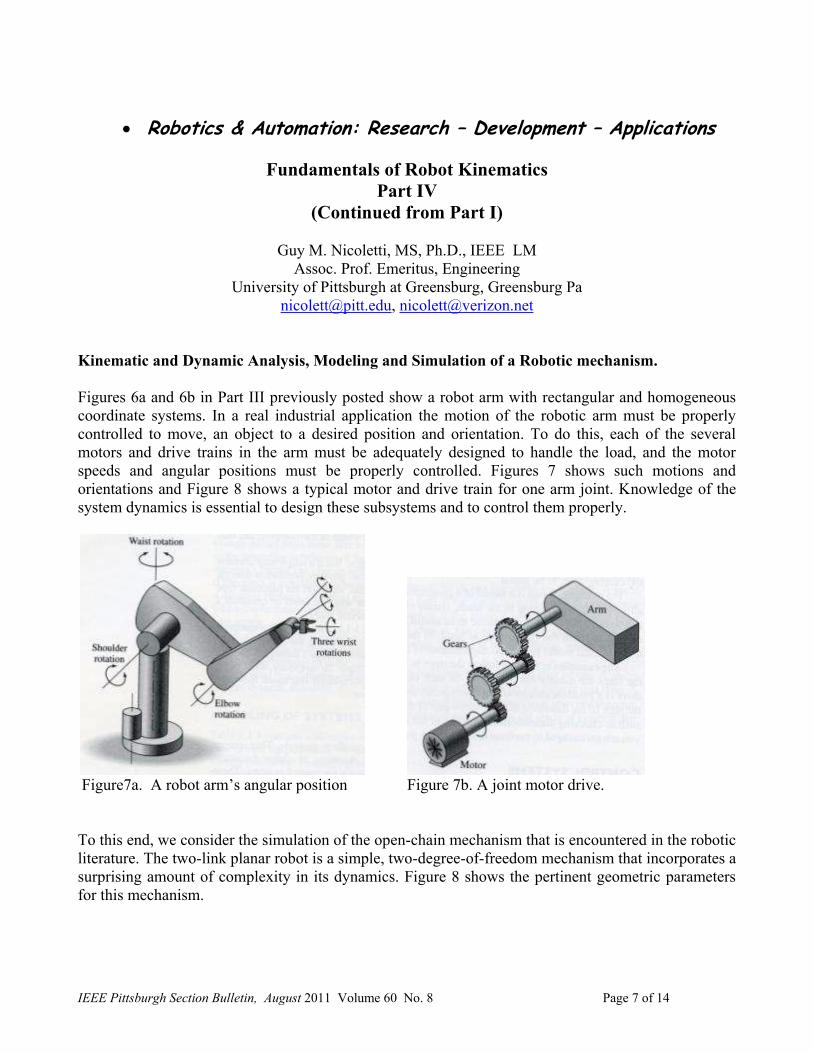
Kinematic and Dynamic Analysis, Modeling and Simulation of a Robotic mechanism.
Figures 6a and 6b in Part III previously posted show a robot arm with rectangular and homogeneous
coordinate systems. In a real industrial application the motion of the robotic arm must be properly
controlled to move, an object to a desired position and orientation. To do this, each of the several
motors and drive trains in the arm must be adequately designed to handle the load, and the motor
speeds and angular positions must be properly controlled. Figures 7 shows such motions and
orientations and Figure 8 shows a typical motor and drive train for one arm joint. Knowledge of the
system dynamics is essential to design these subsystems and to control them properly.
Figure7a. A robot arm’s angular position Figure 7b. A joint motor drive.
To this end, we consider the simulation of the open-chain mechanism that is encountered in the robotic
literature. The two-link planar robot is a simple, two-degree-of-freedom mechanism that incorporates a
surprising amount of complexity in its dynamics. Figure 8 shows the pertinent geometric parameters
for this mechanism.

IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 8 of 14
Figure 8. The two-link robot mechanism
We will derive the appropriate vector equations and dynamic equations for this mechanism. The
resulting dynamic simulation will have two inputs—the torques generated by the two motors.
From Figure 8, the vector equation is:
(11)
The corresponding x- and- y – components are shown below. Note that the form of these equations is
slightly different from those we have seen so far. The reason for these differences lies in the manner in
which the vector angles are been defined. In Figure 8 the angles are referenced to the orientation of the
previous link, not the global x-axis. This convention is common in robotics and arises from the fact
that sensors on robot arms measure the relative angles, not the absolute values.
( ) (12)
( ) (13)
Taking the derivative:
( ) ( ) (14)
( ) ( ) (15)
Rearranging in matrix equation form:
[ ] = [
( ) ( )
] [ ] (16)

IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 9 of 14
This relationship between the joint rate and the end-effector velocities in Cartesian coordinates is well
known in robotics. The matrix in equation (16) is known as the Jacobian matrix, and it can form the
basis of a very effective control algorithm.
The derivatives of equations (14) and (15), (or equivalently equation (16)) lead to the following
acceleration equations:
( ) [( )
]
(17)
( ) [( )
]
(18)
Relations (17) and (18) form the basis of the dynamic simulation; they express the relationship
between the acceleration of the payload and the angular accelerations and velocities of the two joint
motors.
It is also important to establish the relationship between the acceleration of the centers of mass of the
two links and the joint variables. These relationships can easily be derived and summarized next.
(19)
( ) [( )
] ( )
( ) [( )
]
(21)
Dynamic Equations
Next, we will examine the free-body diagrams of each link separately. Figure 9 shows the free-body
diagram of the first link of the two link planar robot.
Figure 9. Free-body diagram of the first link of the two-link
planar robot shown in Figure 8.
IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 10 of 14
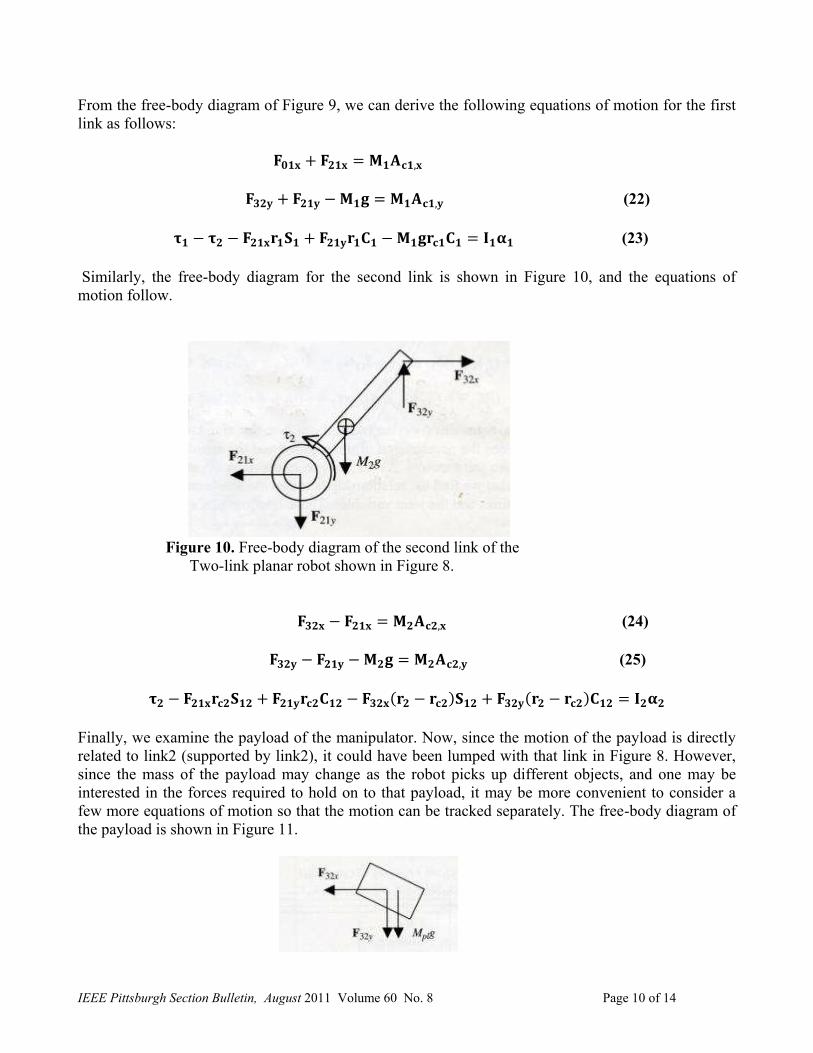
From the free-body diagram of Figure 9, we can derive the following equations of motion for the first
link as follows:
(22)
(23)
Similarly, the free-body diagram for the second link is shown in Figure 10, and the equations of
motion follow.
Figure 10. Free-body diagram of the second link of the
Two-link planar robot shown in Figure 8.
(24)
(25)
( ) ( )
Finally, we examine the payload of the manipulator. Now, since the motion of the payload is directly
related to link2 (supported by link2), it could have been lumped with that link in Figure 8. However,
since the mass of the payload may change as the robot picks up different objects, and one may be
interested in the forces required to hold on to that payload, it may be more convenient to consider a
few more equations of motion so that the motion can be tracked separately. The free-body diagram of
the payload is shown in Figure 11.

IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 11 of 14
Figure 11. Free-body diagram of the payload
In order to reduce the analysis only to two equations we consider the payload as a lumped mass,
therefore, we obtain:
(26)
(27)
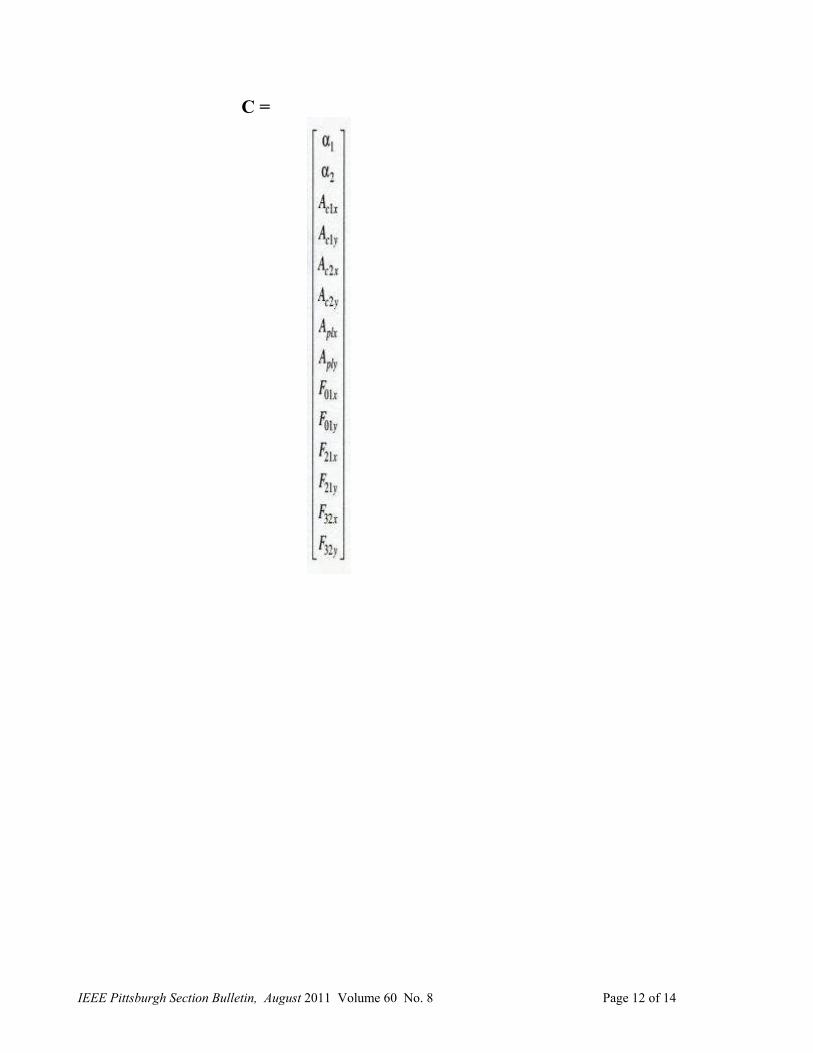
Summarizing, from our analysis, we obtained six equations from the vector equations and eight
equations from the dynamic equations. In addition, since the motor torques will have to be considered
as inputs to the system, all these equations will be expressed in the following fourteen (14) unknowns:
[ ]
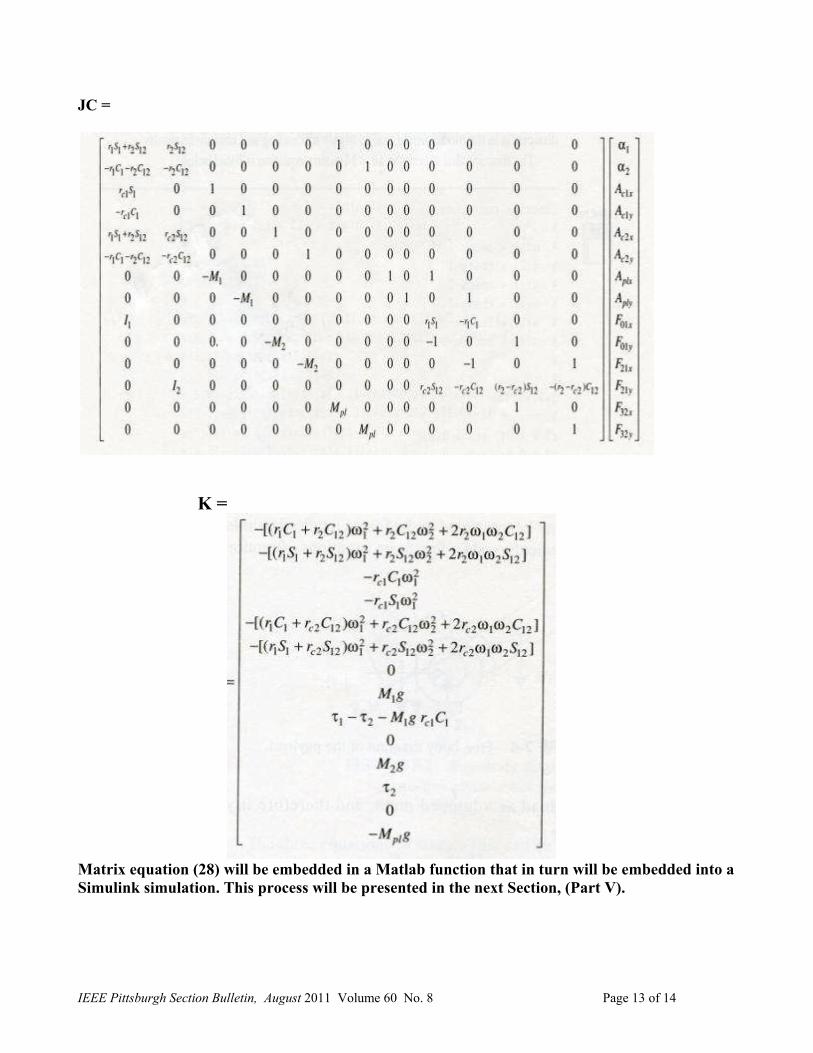
Next, in order to prepare for a system suitable for dynamic simulation, we will combine the 14
equations (six kinematic constraint equations and eight dynamic equations) in 14 unknowns and
express them in matrix form as
J C = K (28)
Where,
J=
IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 12 of 14
C =
IEEE Pittsburgh Section Bulletin, August 2011 Volume 60 No. 8 Page 13 of 14
JC =
K =
Matrix equation (28) will be embedded in a Matlab function that in turn will be embedded into a
Simulink simulation. This process will be presented in the next Section, (Part V).

IEEE Pittsburgh Section Bulletin May 2011 Volume 60 No. 5 Page 14 of 14
2011 Calendar – Meetings of IEEE Pittsburgh Section Jan Feb Mar Apr May June July August Sept Oct Nov Dec
Executive
Committee
20
Panera,
Wilkins
Twp.
17
TBD
17
Panera Bread
Wilkins
21
Panera Bread
Wilkins
19
Panera Bread
Oakland
16
Panera
Miracle
Mile
21
TBD
18
Panera Bread
Oakland
15
TBD
20
WVU
Section 19
Eng. Week
13
History
Dinner
10
Picnic
Communic
ations
3
Network
Arch.
31
Network Arch
14-Wireless
5
Internet
22-Wireless
23
Dist.
Antennas
Computer
EMBS 18
Brain-
Computer
Interface
18
Human
Posture
8
Biometrics
15
Neural
6
Hand
Tracking
24
Skin-screw
electrodes
EMCS 11
Nano Mat.
PES/IAS 19
Capacitors
23
Storage &
Hydro
16
Voltage Reg.
14
PE License
13
History
Dinner
15
Eng.
Designs
9
Pirates
24
Arc Flash
Magnetics
Robotics 10
Advances in
Robotics
Sig.
Processing
18
Brain-
Computer
Interface
18
Human
Posture
14
Wireless
8
Biometrics
15
Neural
22
Wireless
6
Hand
Tracking
24
Skin-screw
electrodes
CPMT/ED 13
Cosmic
Social Impl
Technology
10
Advances in
Robotics
19
Legislative
Upper Mon 28
Cyber
Attacks
4
Wireless
14
Software
Women in
Eng’ing
11
Nano Mat.
Life Mem.
GOLD 14
PE License
PACE 19
Legislative
Student Act