ingenieria de transito, s.a. de c.v. tema 4 – hoja 1 de transito, s.a. de c.v. tema 4 – hoja 5...
TRANSCRIPT
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 1
Sensores Radar en puente sobre el Boulevard B. Quintana, QRO TEMA 4 – Rev. 11/enero/2008
DETECTORES ELEVADOS DE DATOS DE TRANSITO
(aforos, clasificación y detección de velocidad,
sistemas de video-detección)
Detectores a láser visible activo y a infrarrojo pasivo.
Detectores a radar microondas, a radar Doppler, y ultrasónicos. Sistemas de video Analogico, IP, b/n, color
Sistemas para detección automática de incidentes. Sistemas para detección automática del número de placa.
Documentación: www.info.tyssatransito.com [email protected] Detectores_Elevados (.pdf 3239 KB)
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 2
4 DETECTORES ELEVADOS DE DATOS DE TRANSITO
TYSSA presenta sistemas para colocar elevados sobre la calzada (a distancias entre 5 m y 12 m) para determinación e identificación vehicular en las principales tecnologías: láser visible activo, detector infrarrojo pasivo, radar a hiperfrecuencia, radar a efecto doppler, detector ultrasónico, detector de imagen para generación de lazos inductivos virtuales, detectores de video de uso general y para aplicaciones especiales, etc.. TYSSA puede adaptar cualquiera de estas tecnologías a la aplicación particular que se requiera, desarrollando en español el software de propósito especial que sea preciso.
Estos sistemas son preferentemente de uso urbano, y permiten determinar sin necesidad de ranurar las calzadas magnitudes tales como número de vehículos (aforos), velocidades medias o de cada vehículo, clasificación en función de la longitud o altura del vehículo, determinar las dimensiones (alto, largo, ancho) de los vehículos en circulación, capturar el número de la placa. Se puede combinar la detección de unas magnitudes con otras: se puede por ejemplo capturar el numero de placa del vehículo que pasa un semáforo en rojo, o que excede la velocidad limite, o que tiene unas determinadas dimensión (como camiones o trailers que circulan por vías no autorizadas).
Otros detectores se colocan más cercanos a la calzada, como los que se utilizan para clasificar los vehículos en función del número de ejes, o para capturar los número de placa, o para leer los tags de un vehículo a efectos de identificación.
La transmisión de los datos hasta el Centro de Control se puede hacer de muy variadas formas, y protocolos: cables de cobre o de fibra óptica y sistemas de transmisión radio en frecuencias desde 900 MHz hasta 5.8 GHz normalmente, y protocolos serie RS 232, RS 422 y RS 485, aunque actualmente se esta extendiendo para todo este tipo de señales la utilización del protocolo TCP/IP, que permite conexión directa a Internet.
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 3
41. DETECCION DE DATOS DE TRANSITO MEDIANTE SENSOR LASER VISIBLE ACTIVO 411. Sistemas de detección vehicular mediante sensor láser visible activo 412. Sistemas de clasificación vehicular mediante sensor láser visible activo 413. Sistemas de detección vehicular doble carril mediante sensor láser visible activo
42 DETECCION DE DATOS DE TRANSITO MEDIANTE MICRO-ONDAS, PIR, ULTRASONIDOS 421 Detección de vehículos mediante simulación de lazo virtual 422 Detección de vehículos mediante radar a hiperfrecuencia 423 U-RADAR - Detector de vehículos y simulador de lazos inductivos 424 U-RADAR - Aplicaciones en control de transito vehicular y peatonal 0425. Detector infrarrojo pasivo de vehículos (PIV) para control de transito 0426. Detector de datos de trafico ultrasónico & PIR (infrarrojo) 0427. Detector de datos de trafico radar & ultrasónico & PIR (infrarrojo) 0428 Aplicación de detectores elevados en vías urbanas para aforos y detección de velocidad
43. SISTEMAS DE DETECCION Y CONTROL DE VELOCIDAD DE VEHICULOS 431 Sistemas “Radar / Láser / Lidar “ para determinación de la velocidad de los vehículos 432. Sistemas radar fijos para control de velocidad (aviso) en vías urbanas e interurbanas 433. Aplicación de radar en vías urbanas e interurbanas con información de velocidad al conductor 434 Sistemas radar fijos para control de velocidad (fotografía) en vías urbanas e interurbanas 435 Sistemas radar fijos para determinación de velocidad desde vehículos policiales 436 Sistemas radar portátiles (pistolas) para determinación de velocidad de los vehículos 437. Sistemas láser portátiles (pistolas) para determinación de velocidad de los vehículos 438. Esquema de sistema lidar( o radar) para control de la velocidad desde patrulla policial 439. Componentes de sistema lidar o radar para control de la velocidad desde patrulla policial
44. SISTEMAS DE CAPTACIÓN DE NUMERO DE PLACA EN CONDICIONES DE FLUJO LIBRE 441. Sistema ANPR (reconocimiento de numero de placa) en condiciones de flujo libre 442 Sistema ANPR (reconocimiento de numero de placa) desde vehiculo policial 443 Sistema dual (captura de numero de placa + video vigilancia) desde vehiculo policial
45. SISTEMAS DE VIDEO – DETECCION Y RADIO TRANSMISION 451 Sistema de Detección Automática de Incidentes. 452 Sistemas de Video-Detección Inteligentes 453 Equipos utilizados en los Sistemas de Detección Automática de Incidentes 454 Sistema CCTV (Circuito Cerrado de Televisión) de tipo convencional. 455 Sistema de video digital en protocolo TCP/IP (Internet) desde la toma de señal 456 Sistema de radio a micro-ondas y modems telefónicos GPRS para transmisión de datos 457 Sistemas de transmisión de radio configurable para señales todo/nada y analógicas 458 Sistema de transmisión para señales de video / audio convencionales hasta 4 Km

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 4
4 DETECTORES ELEVADOS DE DATOS DE TRANSITO
41. DETECCION DE DATOS DE TRANSITO MEDIANTE SENSOR LASER ACTIVO HAY DOS APLCACIONES BÁSICAS DE LOS EQUIPOS AUTOSENSE QUE UTILIZAN LASER ACTIVO: A) MEDIDA DE DIMENSIONES CON SALIDA DE DATOS EN CÓDIGO ASCII, SIN IMAGEN, PARA PROPÓSITOS DE CONTROL DE DIMENSIONES O CLASIFICACIÓN VEHICULAR, O B) OBTENCIÓN DE PSEUDO IMAGENES COMO LA QUE SE VE EN LA FIGURA PARA PROPÓSITOS DE MONITORIZACIÓN..
LOS EQUIPOS AUTOSENSE UTILIZAN UN LÁSER VISIBLE SEGURO PARA DETECTAR Y PARA CLASIFICAR LOS VEHÍCULOS, PERO PARA QUE LOS EQUIPOS .AUTOSENSE FUNCIONEN CORRECTAMENTE, DEBEN PODER DETECTAR EL PULSO DEL LÁSER “REFLEJADO” POR UN OBJETO (ES DECIR, COCHE) O POR LA CARRETERA, Y PUESTO QUE MUCHAS SUPERFICIES DE LA CARRETERA NO PROPORCIONAN UN CONSISTENTE PATRÓN REFLEXIVO PARA EL LÁSER, SE PUEDE REQUERIR UNA MEJORA DE LA SUPERFICIE PARA ASEGURAR LA REFLECTIVIDAD ADECUADA PARA EL LÁSER.
LA REFLECTIVIDAD DE LA CARRETERA ES MEJOR EN SUPERFICIES DE CONCRETO ARMADO Y PEOR EN CALZADAS DE CONCRETO ASFÁLTICO NEGRO RECIENTES. DURANTE.UN CIERTO TIEMPO, LA SUPERFICIE OSCURA NO REFLEXIVA DEL ASFALTO NEGRO SE DECOLORA, DE TAL MODO QUE MEJORA LA REFLECTIVIDAD. SIN EMBARGO, HASTA QUE ESTO SUCEDA, EL FUNCIONAMIENTO DEL AUTOSENSE INO SERÁ EL ADECUADO. PARA REDUCIR AL MÍNIMO EL IMPACTO DE UNA POBRE REFLECTIVIDAD DE LA CARRETERA, SE RECOMIENDA PINTAR UNA FRANJA EN LA SUPERFICIE DE LA CARRETERA DEBAJO DE LOS RAYOS LÁSER.
411. Sistemas de detección vehicular mediante sensor láser visible activo 412. Sistemas de clasificación vehicular mediante sensor láser visible activo 413. Sistemas de detección vehicular doble carril mediante sensor láser ivisible activo
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 5 411
SISTEMAS DE DETECCIÓN VEHICULAR MEDIANTE SENSOR LÁSER VISIBLE ACTIVO
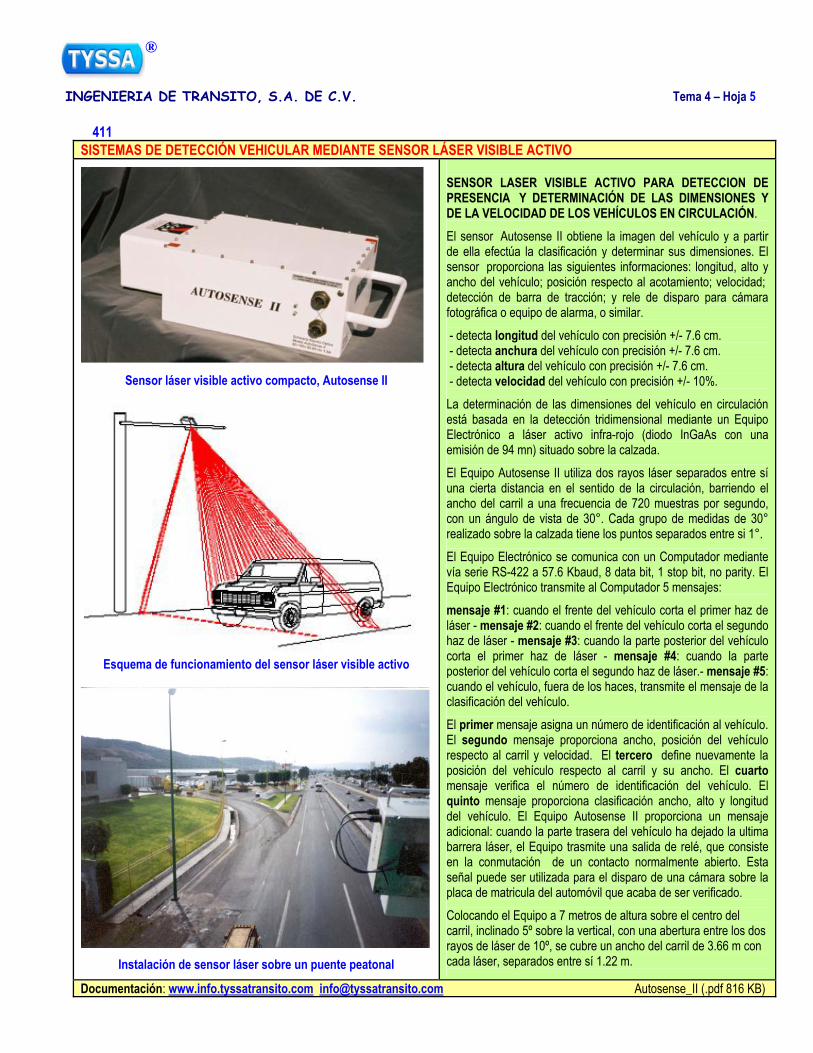
Sensor láser visible activo compacto, Autosense II
Esquema de funcionamiento del sensor láser visible activo
Instalación de sensor láser sobre un puente peatonal
SENSOR LASER VISIBLE ACTIVO PARA DETECCION DE PRESENCIA Y DETERMINACIÓN DE LAS DIMENSIONES Y DE LA VELOCIDAD DE LOS VEHÍCULOS EN CIRCULACIÓN.
El sensor Autosense II obtiene la imagen del vehículo y a partir de ella efectúa la clasificación y determinar sus dimensiones. El sensor proporciona las siguientes informaciones: longitud, alto y ancho del vehículo; posición respecto al acotamiento; velocidad; detección de barra de tracción; y rele de disparo para cámara fotográfica o equipo de alarma, o similar.
- detecta longitud del vehículo con precisión +/- 7.6 cm. - detecta anchura del vehículo con precisión +/- 7.6 cm. - detecta altura del vehículo con precisión +/- 7.6 cm. - detecta velocidad del vehículo con precisión +/- 10%.
La determinación de las dimensiones del vehículo en circulación está basada en la detección tridimensional mediante un Equipo Electrónico a láser activo infra-rojo (diodo InGaAs con una emisión de 94 mn) situado sobre la calzada.
El Equipo Autosense II utiliza dos rayos láser separados entre sí una cierta distancia en el sentido de la circulación, barriendo el ancho del carril a una frecuencia de 720 muestras por segundo, con un ángulo de vista de 30°. Cada grupo de medidas de 30° realizado sobre la calzada tiene los puntos separados entre si 1°.
El Equipo Electrónico se comunica con un Computador mediante vía serie RS-422 a 57.6 Kbaud, 8 data bit, 1 stop bit, no parity. El Equipo Electrónico transmite al Computador 5 mensajes:
mensaje #1: cuando el frente del vehículo corta el primer haz de láser - mensaje #2: cuando el frente del vehículo corta el segundo haz de láser - mensaje #3: cuando la parte posterior del vehículo corta el primer haz de láser - mensaje #4: cuando la parte posterior del vehículo corta el segundo haz de láser.- mensaje #5: cuando el vehículo, fuera de los haces, transmite el mensaje de la clasificación del vehículo.
El primer mensaje asigna un número de identificación al vehículo. El segundo mensaje proporciona ancho, posición del vehículo respecto al carril y velocidad. El tercero define nuevamente la posición del vehículo respecto al carril y su ancho. El cuarto mensaje verifica el número de identificación del vehículo. El quinto mensaje proporciona clasificación ancho, alto y longitud del vehículo. El Equipo Autosense II proporciona un mensaje adicional: cuando la parte trasera del vehículo ha dejado la ultima barrera láser, el Equipo trasmite una salida de relé, que consiste en la conmutación de un contacto normalmente abierto. Esta señal puede ser utilizada para el disparo de una cámara sobre la placa de matricula del automóvil que acaba de ser verificado.
Colocando el Equipo a 7 metros de altura sobre el centro del carril, inclinado 5º sobre la vertical, con una abertura entre los dos rayos de láser de 10º, se cubre un ancho del carril de 3.66 m con cada láser, separados entre sí 1.22 m.
Documentación: www.info.tyssatransito.com [email protected] Autosense_II (.pdf 816 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 6 412
SISTEMAS DE CLASIFICACION VEHICULAR POR NUMERO DE EJES MEDIANTE SENSOR LÁSER VISIBLE ACTIVO
Sensor láser visible activo de la Serie 700, para detectar el número de ejes de un vehículo en flujo libre y en peajes.
Instalación del sensor láser visible activo para detección del número de ejes instalado sobre el lateral de la calzada.
La primera imagen representa la pseudo-fotografía proporcionada por el sensor láser. La segunda imagen esta tomada con CCTV.
SENSOR LASER VISIBLE ACTIVO PARA CLASIFICACION VEHICULAR EN BASE AL NUMERO DE EJES DEL VEHICULO
Autosense Serie 700
Diseñado para montaje lateral a un lado y fuera del carril de transito, el Autosense serie 700 proporciona para cada carril detección del vehículo, separación entre ejes, velocidad, numero de ejes y salida de rele para disparo de cámara fotográfica de control. El sistema opera emitiendo dos haces de rayos láser que escanean el lateral del vehículo (automóvil, camión, autobús) en orden a determinar el numero de ejes del vehículo sobre la calzada. El sistema es un sustituto ideal para los lazos y sensores de ejes tanto en carreteras abiertas como en entornos de barreras y peajes.
Autosense 705 : Para detección en flujo libre, aplicaciones de carretera abierta, del número de vehículos, separación entre ejes clasificación y velocidad de automóviles, camiones y autobuses circulando a altas velocidades.
Autosense 715 : Diseñada para aplicaciones en barreras y peajes, el sensor es capaz de proporcionar numero de vehículos, separación entre ejes y clasificación en función del numero de ejes de automóviles, camiones y autobuses, a velocidades de hasta 64.8 Km/h.
Especificaciones técnicas AS705 AS715
Prestaciones Uso: Flujo libre Peajes Montaje: Lateral Lateral Campo de vista: 30° 40° Densidad de píxeles: 0.5° a 1° 0.5° a 2° Categorías clasificación: configurables según n° de ejes Precisión de detección: >99.9% >99.9% Precisión de clasificación: >95% >99% Precisión en velocidad: +/-10% +/-10% Precisión altura vehículo: +/-76 mm no disponible Detección fin vehículo: 0.3 m después de pasar vehículo Separación entre vehículos (3m a 200Km/h – 1.2m a 100Km/h): Detección barra trailer: (>5cm alto, >60cm alto a 200 Km/h) Características físicas Alimentación: 90 a 140 V, 50 a 60 Hz, 1.5 A Consumo: 35 watt nom., 157 watt max. Dimensiones: 455 x 244 x 155 mm Peso: 9.3 Kg Procesador e interface: Computador incorporado: AD (Sharc) 21060, 32 bit, 40 MHz Lógica multipulso: 4 canales para cada pulso láser Interface: RS-422 o RS-232 Ambientales Temperatura: -5°C a +70°C Humedad: 0 100% condensación Lluvia: : opera hasta 20 mm/hora
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 7 413
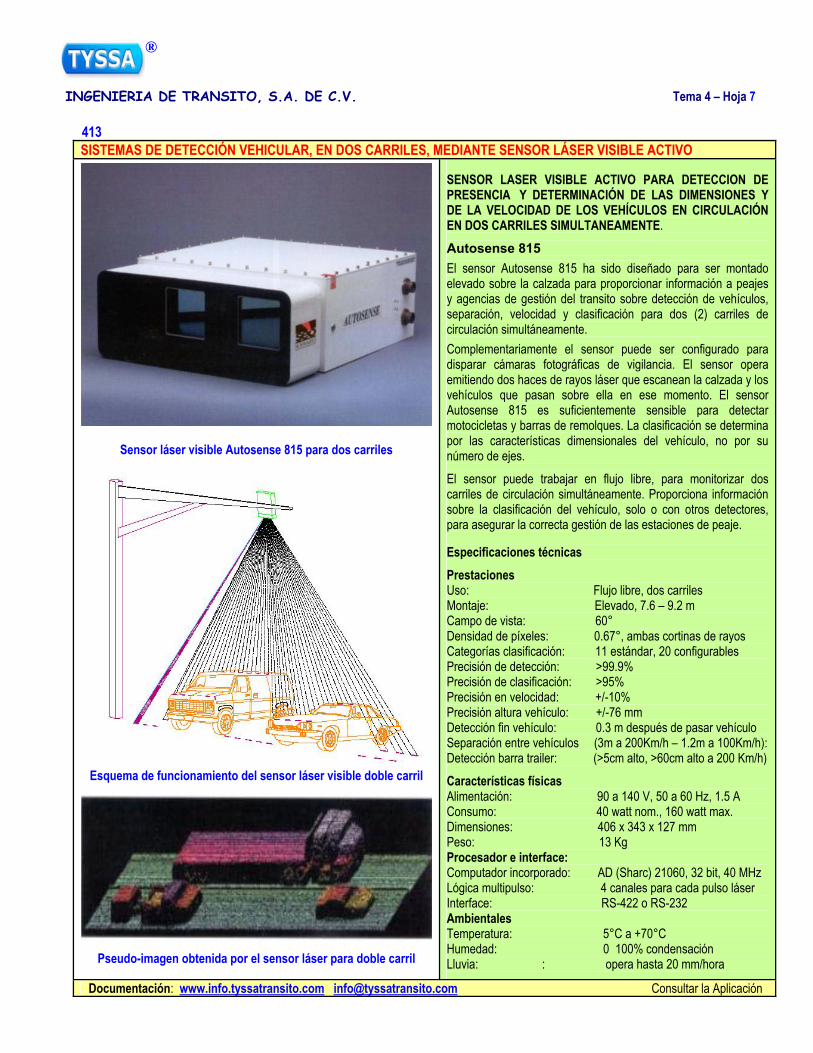
SISTEMAS DE DETECCIÓN VEHICULAR, EN DOS CARRILES, MEDIANTE SENSOR LÁSER VISIBLE ACTIVO
Sensor láser visible Autosense 815 para dos carriles
Esquema de funcionamiento del sensor láser visible doble carril
Pseudo-imagen obtenida por el sensor láser para doble carril
SENSOR LASER VISIBLE ACTIVO PARA DETECCION DE PRESENCIA Y DETERMINACIÓN DE LAS DIMENSIONES Y DE LA VELOCIDAD DE LOS VEHÍCULOS EN CIRCULACIÓN EN DOS CARRILES SIMULTANEAMENTE.
Autosense 815
El sensor Autosense 815 ha sido diseñado para ser montado elevado sobre la calzada para proporcionar información a peajes y agencias de gestión del transito sobre detección de vehículos, separación, velocidad y clasificación para dos (2) carriles de circulación simultáneamente.
Complementariamente el sensor puede ser configurado para disparar cámaras fotográficas de vigilancia. El sensor opera emitiendo dos haces de rayos láser que escanean la calzada y los vehículos que pasan sobre ella en ese momento. El sensor Autosense 815 es suficientemente sensible para detectar motocicletas y barras de remolques. La clasificación se determina por las características dimensionales del vehículo, no por su número de ejes.
El sensor puede trabajar en flujo libre, para monitorizar dos carriles de circulación simultáneamente. Proporciona información sobre la clasificación del vehículo, solo o con otros detectores, para asegurar la correcta gestión de las estaciones de peaje. Especificaciones técnicas
Prestaciones Uso: Flujo libre, dos carriles Montaje: Elevado, 7.6 – 9.2 m Campo de vista: 60° Densidad de píxeles: 0.67°, ambas cortinas de rayos Categorías clasificación: 11 estándar, 20 configurables Precisión de detección: >99.9% Precisión de clasificación: >95% Precisión en velocidad: +/-10% Precisión altura vehículo: +/-76 mm Detección fin vehículo: 0.3 m después de pasar vehículo Separación entre vehículos (3m a 200Km/h – 1.2m a 100Km/h): Detección barra trailer: (>5cm alto, >60cm alto a 200 Km/h)
Características físicas Alimentación: 90 a 140 V, 50 a 60 Hz, 1.5 A Consumo: 40 watt nom., 160 watt max. Dimensiones: 406 x 343 x 127 mm Peso: 13 Kg Procesador e interface: Computador incorporado: AD (Sharc) 21060, 32 bit, 40 MHz Lógica multipulso: 4 canales para cada pulso láser Interface: RS-422 o RS-232 Ambientales Temperatura: 5°C a +70°C Humedad: 0 100% condensación Lluvia: : opera hasta 20 mm/hora
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 8
4 DETECTORES ELEVADOS DE DATOS DE TRANSITO
42 DETECCION DE DATOS DE TRANSITO MEDIANTE MICRO-ONDAS, PIR, ULTRASONIDOS
PRESTACIONES: LOS DETECTORES ELEVADOS, SIN NECESIDAD DE OBRA CIVIL, PERMITEN CONOCER: • CONTEO DE VEHÍCULOS • DETERMINACIÓN DE VELOCIDAD • CLASIFICACIÓN POR TIPO DE VEHÍCULOS • DETECCIÓN DE VEHÍCULOS PARADOS • DETECCIÓN DE VEHÍCULOS QUE CAMBIAN DE CARRIL • DETECCIÓN DE VEHÍCULOS ENTRE CARRILES • DETECCIÓN DE CONDUCTORES EN SENTIDO CONTRARIO • INFORMACIÓN SOBRE LA LONGITUD DEL VEHÍCULO • DETECCIÓN DE PRESENCIA Y DE COLAS • OCUPACION, DISTANCIA Y TIEMPO ENTRE VEHICULOS
TRANSMISIÓN DE LOS DATOS: LOS DATOS DE TRANSITO PUEDEN SER ALMACENADOS EN SITIO EN COMPUTADOR DE PROPÓSITO ESPECIAL SITUADO, Y TRANSMITIDOS A LA CENTRAL PERIÓDICAMENTE VÍA TELEFÓNICA O GPRS, O PUEDEN SER TRANSMITIDOS A LA CENTRAL EN TIEMPO REAL. EN ESTE CASO CONVIENE UTILIZAR TRANSMISIÓN VÍA RADIO (MICRO-ONDAS A 900 MHZ O 2,4/5.8 GHZ) PORQUE LA TRANSMISIÓN TELEFÓNICA O POR LINEA PROPIA PUEDEN RESULTAR EXCESIVAMENTE COSTOSAS.
421 Detección de vehículos mediante simulación de lazo virtual 422 Detección de vehículos mediante radar a hiperfrecuencia 423 U-RADAR - Detector de vehículos y simulador de lazos inductivos 424 U-RADAR - Aplicaciones en control de transito vehicular y peatonal 425. Detector infrarrojo pasivo de vehículos (PIV) para control de transito 426. Detector de datos de trafico ultrasónico & PIR (infrarrojo) 427. Detector de datos de trafico radar & ultrasónico & PIR (infrarrojo) 428 Aplicación de detectores elevados en vías urbanas para aforos y detección de velocidad

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 9 421
DETECTOR DE IVEHICULOS MEDIANTE LA SIMULACION DE LAZO VIRTUAL
Detector de imagen “DVS” para simulación de lazos
Sistema “Transcom” de conexión inalámbrica
DETECTOR DE IMAGEN SENSOR "DVS2"
Conjuntando una detección optima y una solución económica, el detector universal en tecnología “Image Sensor” representa un concepto revolucionario. Simula el funcionamiento de un lazo virtual parametrable y sin ingeniería civil.
La utilización de alta tecnología en ingeniería y en tratamiento de señal si como un nivel de integración excepcional permiten presentar este detector en una caja monobloc compacta. Completamente autónomo, discreto y estético, el sistema se instala fácilmente sin tener que recurrir a utilizar pantallas de visualización externas. El telemando infrarrojo disponible en opción facilita las modificaciones de parametraje en sitio.
Aplicaciones: Regulación del transito Control de luces de transito Detección de giro a la izquierda Detección de carril de bus Generación de lazo virtual Control de accesos (puertas, barreras, etc..) Aforo vehicular
Características: Rango de operación hasta 100 m Detección estática y dinámica Discriminación de tamaños Area de detección ajustable con precisión Reset de tiempo de presencia ajustable SISTEMA «TRANSCOM« DE CONEXION INALAMBRICA DE SEÑALES DE TRANSITO
El sistema "TRANSCOM" se compone de una antena de radio y de una caja de interface, y permite la transmisión bidireccional sin hilos entre el lugar donde están situados los detectores y el órgano de control.
Este sistema se utiliza para informar, por ejemplo, del estado de los relés secos hasta una distancia de 400 m en campo a la vista. Su tecnología innovadora asegura, por radio modem (433 MHz) comunicaciones muy seguras en tiempo real. Asociado a un código polinominal, esta solución garantiza una conexión de muy alta fiabilidad.
Aplicaciones: - Coordinación y sincronización de corredores - Transmisión estado de reles entre detectores y controladores - Estacionamientos: Conexión inalámbrica entre detectores y centro de control
Características: - Transmisión de información de estado de contactos - Bidireccional - Comunicación RS 485 entre antena y caja de control
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 10 422
DETECTECTOR DE VEHICULOS MEDIANTE RADAR A HIPERFRECUENCIA
Sistema “IH” de prioridad para autobuses en base a radar
Radar a hiperfrecuencia para detección de vehículos
Sistema “IH” de prioridad para autobuses en base a radar
Sistema “IH” de prioridad para autobuses
DETECTECTOR A HIPERFRECUENCIA CAPSYS SERIE “RHB” RADAR A EFECTO DOPPLER FIZEAU
El Radar de alta tecnología S P O T utiliza el principio de Doppler Fizeau, en banda de frecuencia de 24,125 GHz. Gracias a ésta muy elevada frecuencia, y a una extrema miniaturización, el Radar SPOT obtiene unas prestaciones excepcionales, montado en caja estanca y compacta. Cada parámetro: alcance, sentido de marcha, movimiento mínimo, se ajustan sin desmontajes incómodos desde la cara frontal (sin tornillos). Un Telemando Infrarrojo opcional facilita las modificaciones de los parámetros a distancia, con visualización inmediata del resultado.
A diferencia del Radar a micro-ondas convencional que determina la distancia a la que se encuentra un objeto, en movimiento o parado, en función del tiempo entre la emisión y la recepción de la onda reflejada, el radar a efecto doppler determina la velocidad de un objeto en movimiento comparando la frecuencia de la onda emitida con la frecuencia de la onda reflejada. Aplicaciones : - Mando de semáforos de tráfico. - Disparo de señalización de velocidad excesiva - Detección de Peatones
Propiedades : - Alcance hasta 60 m. - Detección unidireccional en sentido llegando o omnidireccional. - 16 umbrales de velocidad excesiva definibles. - Conector (es) estanco (s) - Ajustes en cara frontal sin desmontajes - Telemando Infrarrojo (en opción).
Tecnología El Radar hiperfrecuencia 24.125 GHz << SPOT >> va conectado a un procesador muy potente del tipo HCmos el cual, aumenta la fiabilidad de funcionamiento.
SISTEMA DE PRIORIDAD A HIPERFRECUENCIA CAPSYS “IH”
Este sistema, basado en modulación de portadora a 24,125 GHz asegura una comunicación de largo alcance y excelente fiabilidad entre el emisor embarcado sobre el vehículo y el receptor montado en el controlador de tránsito.
La codificación manual o automática por enlace serie permita gestionar una flota de autobuses en medio urbano. La caja estanca y compacta, con conector desenchufable permite una integración rápida y estética y asegura la gestión de los controladores de tránsito sin trabajos de ingeniería civil.
Todos los parámetros del sistema se ajustan en su parte frontal, sin necesidad de laboriosos desmontajes. El telecomando infrarrojo en opción sobre el receptor facilita las modificaciones de parametraje a distancia con una visualización inmediata del resultado.
Documentación: www.info.tyssatransito.com [email protected] Capsys_Serie_RHB (.pdf 406 KB)
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 11 423
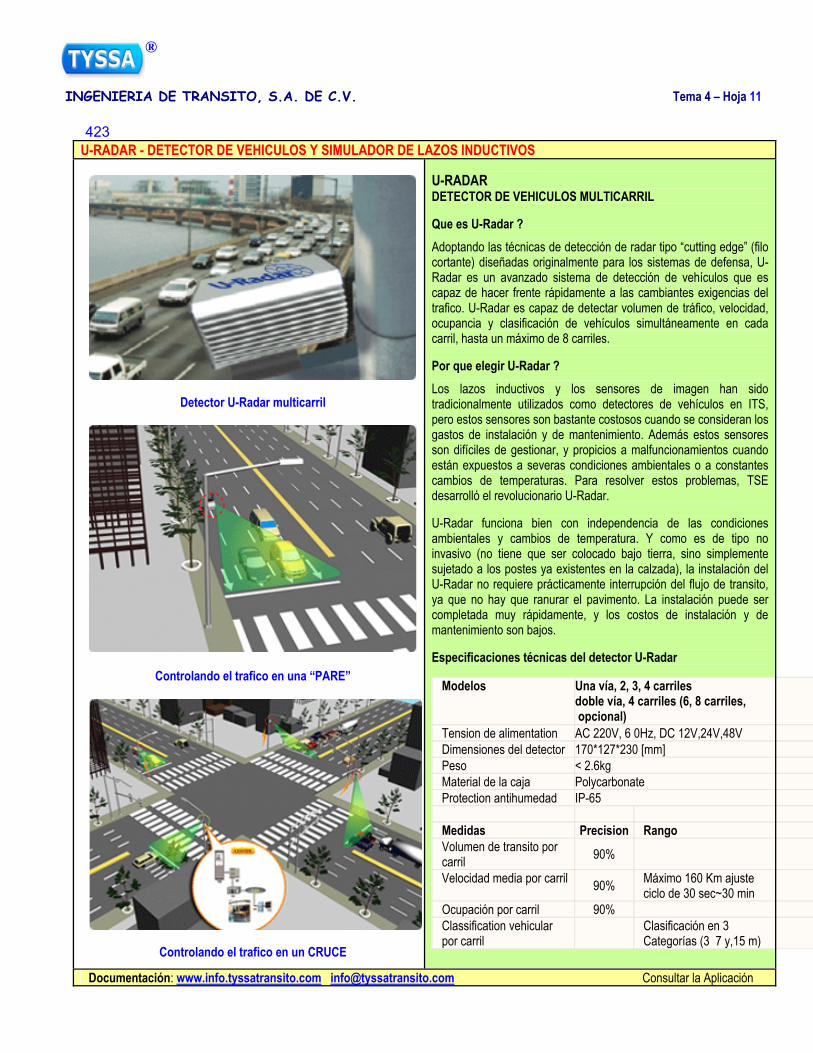
U-RADAR - DETECTOR DE VEHICULOS Y SIMULADOR DE LAZOS INDUCTIVOS
Detector U-Radar multicarril
Controlando el trafico en una “PARE”
Controlando el trafico en un CRUCE
U-RADAR DETECTOR DE VEHICULOS MULTICARRIL Que es U-Radar ?
Adoptando las técnicas de detección de radar tipo “cutting edge” (filo cortante) diseñadas originalmente para los sistemas de defensa, U-Radar es un avanzado sistema de detección de vehículos que es capaz de hacer frente rápidamente a las cambiantes exigencias del trafico. U-Radar es capaz de detectar volumen de tráfico, velocidad, ocupancia y clasificación de vehículos simultáneamente en cada carril, hasta un máximo de 8 carriles. Por que elegir U-Radar ?
Los lazos inductivos y los sensores de imagen han sido tradicionalmente utilizados como detectores de vehículos en ITS, pero estos sensores son bastante costosos cuando se consideran los gastos de instalación y de mantenimiento. Además estos sensores son difíciles de gestionar, y propicios a malfuncionamientos cuando están expuestos a severas condiciones ambientales o a constantes cambios de temperaturas. Para resolver estos problemas, TSE desarrolló el revolucionario U-Radar. U-Radar funciona bien con independencia de las condiciones ambientales y cambios de temperatura. Y como es de tipo no invasivo (no tiene que ser colocado bajo tierra, sino simplemente sujetado a los postes ya existentes en la calzada), la instalación del U-Radar no requiere prácticamente interrupción del flujo de transito, ya que no hay que ranurar el pavimento. La instalación puede ser completada muy rápidamente, y los costos de instalación y de mantenimiento son bajos. Especificaciones técnicas del detector U-Radar
Modelos Una vía, 2, 3, 4 carriles doble vía, 4 carriles (6, 8 carriles, opcional)
Tension de alimentation AC 220V, 6 0Hz, DC 12V,24V,48V Dimensiones del detector 170*127*230 [mm] Peso < 2.6kg Material de la caja Polycarbonate Protection antihumedad IP-65 Medidas Precision Rango Volumen de transito por carril 90%
Velocidad media por carril 90% Máximo 160 Km ajuste ciclo de 30 sec~30 min
Ocupación por carril 90% Classification vehicular por carril Clasificación en 3
Categorías (3 7 y,15 m)
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 12 424
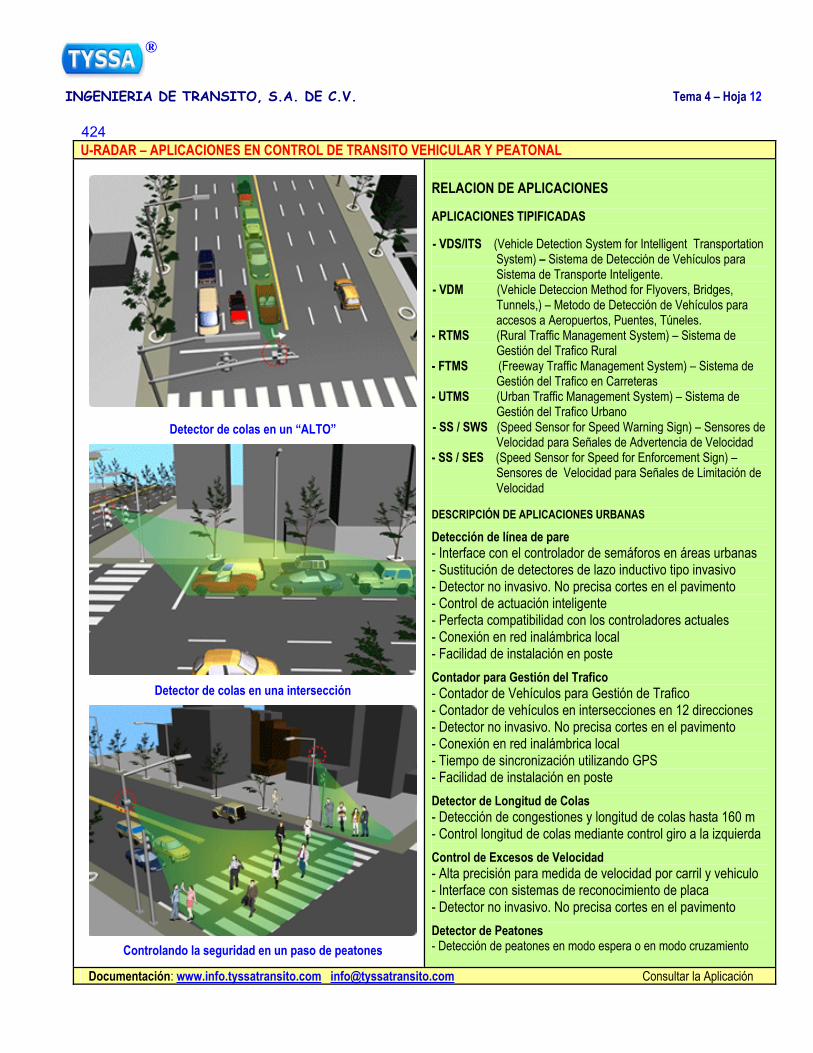
U-RADAR – APLICACIONES EN CONTROL DE TRANSITO VEHICULAR Y PEATONAL
Detector de colas en un “ALTO”
Detector de colas en una intersección
Controlando la seguridad en un paso de peatones
RELACION DE APLICACIONES APLICACIONES TIPIFICADAS - VDS/ITS (Vehicle Detection System for Intelligent Transportation
System) – Sistema de Detección de Vehículos para Sistema de Transporte Inteligente.
- VDM (Vehicle Deteccion Method for Flyovers, Bridges, Tunnels,) – Metodo de Detección de Vehículos para accesos a Aeropuertos, Puentes, Túneles.
- RTMS (Rural Traffic Management System) – Sistema de Gestión del Trafico Rural
- FTMS (Freeway Traffic Management System) – Sistema de Gestión del Trafico en Carreteras
- UTMS (Urban Traffic Management System) – Sistema de Gestión del Trafico Urbano
- SS / SWS (Speed Sensor for Speed Warning Sign) – Sensores de Velocidad para Señales de Advertencia de Velocidad
- SS / SES (Speed Sensor for Speed for Enforcement Sign) – Sensores de Velocidad para Señales de Limitación de Velocidad
DESCRIPCIÓN DE APLICACIONES URBANAS
Detección de línea de pare - Interface con el controlador de semáforos en áreas urbanas - Sustitución de detectores de lazo inductivo tipo invasivo - Detector no invasivo. No precisa cortes en el pavimento - Control de actuación inteligente - Perfecta compatibilidad con los controladores actuales - Conexión en red inalámbrica local - Facilidad de instalación en poste
Contador para Gestión del Trafico - Contador de Vehículos para Gestión de Trafico - Contador de vehículos en intersecciones en 12 direcciones - Detector no invasivo. No precisa cortes en el pavimento - Conexión en red inalámbrica local - Tiempo de sincronización utilizando GPS - Facilidad de instalación en poste
Detector de Longitud de Colas - Detección de congestiones y longitud de colas hasta 160 m - Control longitud de colas mediante control giro a la izquierda
Control de Excesos de Velocidad - Alta precisión para medida de velocidad por carril y vehiculo - Interface con sistemas de reconocimiento de placa - Detector no invasivo. No precisa cortes en el pavimento
Detector de Peatones - Detección de peatones en modo espera o en modo cruzamiento
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 13 425
DETECTOR INFRAROJO PASIVO (PIR) DE VEHICULOS PARA AFORO VEHICULAR
Detector infrarrojo de presencia IR 220
Detector IR de presencia, conteo, velocidad, longitud IR 250
Esquema de zonas de trabajo del detector IR 250
DETECTORES DE TRANSITO INFRA-ROJOS PASIVOS “ASIM”
Los detectores infla-rojos pasivos (PIR) discriminan los pequeños cambios en la radiación térmica causada por un vehículo en movimiento dentro o a través del campo de visión. El micro-procesador que controla el análisis de la señal se adapta automáticamente a las condiciones de contraste del ambiente. La detección multicanal permite proporcionar información de presencia, conteo de vehículos, y otras características del transito dependiendo de la configuración que se haya establecido.
Aplicaciones: Detección de vehículos con varias funciones programables por el usuario dependiendo del propósito, los requerimientos de la instalación, y el sitio, al objeto de optimizar el flujo del transito y recoger datos para sistemas avanzados de control del transito. Los detectores pueden ser montados en la parte alta de las señales, o en puentes, o poste propio, para:
− Conteo de vehículos − Detección de presencia en la línea de parada (“stop”) − Detección de ocupación de la calzada − Detección de colas MODELOS
ASIM IR 201: Rango nominal 30 m ASIM IR 203: Rango nominal 50 m ASIM IR 24: Rango nominal 100 m ASIM IR 206: Rango nominal 15 m
ASIM IR 207: Para peatones, montaje en esquina ASIM IR 208: Para peatones, montaje frontal
ASIM IR 14: Rango nominal hasta 50 m, multizona
ASIM IR 24: Rango hasta 9 m, multizona, programable
ASIM IR 241: Rango hasta 30 m, haz estrecho ASIM IR 248: Rango hasta 6 m, cubrimiento volumétrico ASIM IR 250: DETECTOR “PIR” MULTI-HAZ
Este sensor proporciona una combinación de canales de detección estáticos y dinámicos con la óptica apropiada cubre dos o mas zonas de detección. En cada momento, la radiación térmica de un vehículo en movimiento se compara con la radiación previa de la calzada en orden a determinar la presencia o el paso de los vehículos. Estas señales se procesan para obtener, entre otras informaciones:
− Conteo de vehículos − Detección de velocidad − Clasificación por longitud − Detección de presencia ASIM IR 254: Altura de montaje 4 a 10 m ASIM IR 255 Altura de montaje 8 a 20 m
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 14 426
DETECTOR DE DATOS DE TRANSITO ULTRASONICO & PIR (INFRARROJO)
Detector de datos de tráfico ASIM DT 270
Dimensiones mecánicas del detector ASIM DT 270
Montaje vertical o horizontal del detector ASIM DT 270
Convertidor RS 485 a RS 232 para el detector ASIM DT 270
DETECTOR DE DE DATOS DE TRANSITO ASIM DT 270
Detector Activo/Pasivo de doble tecnología: Ultrasónica & Infrarroja (PIR), para conteo y detección de presencia.
La utilización combinada de las dos tecnologías permite una detección precisa de toda clase de objetos y personas.
Tecnología:
La combinación de la doble tecnología Ultrasónica e Infra-roja Pasiva juntamente con una lógica inteligente permite a estos detectores localizar la posición instantánea.
Aplicaciones: Detección de vehículos disponiendo funciones programables por el usuario dependiendo del propósito, los requerimientos de la instalación, y el sitio, para:
− Detección de presencia − Detección de colas − Conteo de vehículos − Discriminación según altura − Determinación de distancia
Especificaciones técnicas:
Ultrasónico: 50 KHz Infrarrojo: 8 – 14 µm Precisión: +/-3% en presencia, +/-3% rango Alimentación: 24-115-230 VAC/12-24 VDC Salida: 2 x rele SPTD – 2 x transistor 2 x Optoacoplador – RS 495 Dimensiones: Ver diagrama Material caja: Aluminio anodizado Temperatura: Operación desde -30°C hasta +60°C Humedad: 95% RH máximo. Proteccion: IP64
CONVERTIDOR RS 485 A RS 232
Especificaciones Técnicas Dimensiones (LxWxH) 100 x 65 x 35 mm Peso aprox. 250 gr. Longitud cable 2.5 m Colores cable Blanco - RS485 A , Amarillo - RS485 B Marrón - Tierra Cable a PC 3 m, 9 pin serie Alimentación 9ª 24 VDC (adaptador incluido) Consumo aprox. 16 ma.
Cable recomendado Cable de poliuretano (PU) con malla y par trenzado. Calibres AWG 22 o AWG 23. Para conectores PG 9 de 6 a 9.5 mm de entrada. Cable de 2 conductores par trenzado para alimentación, RS 485 (no más 1200 m) y sincronización (cuando los equipos monitorizan varios carriles adyacentes a menos de 8 m entre ellos).Conectar la pantalla a tierra en el lado del equipo TT 290.
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 15 427
DETECTOR DE DATOS DE TRANSITO RADAR & ULRASONICO & PIR (INFRARROJO)
Detector de datos de trafico ASIM TT290
Esquema de funcionamiento del detector TT290
Cuadro de clasificación vehicular de la serie TT290
DETECTOR DE DATOS DE TRANSITO ASIM SERIE TT 290
PARA AFOROS Y CLASIFICACION VEHICULAR. CON DETECCION OCUPACION DE LA VIA Y DE VELOCIDAD
Tres tecnologías en una sola unidad
Micro-ondas (MW) - Infra-rojo (PIR) - Ultra-sonido (US)
Cuentan, clasifican, determinan longitud y velocidad de los vehículos que circulan por un carril - Calculan el intervalo en tiempo
y distancia entre vehículos - Calculan ocupación de la vía.
Los detectores ASIM de triple tecnología utilizan una combinación de Radar Doppler, Ultrasonido e Infrarrojo Pasivo en una sola unidad. La velocidad de cada vehículo, su longitud y clase, la distancia y tiempo entre vehículos y la ocupación de la vía están disponibles vía serie RS 485, en todas las situaciones de tránsito y ambientales, día y noche. La transmisión de la señal se puede efectuar vía serie (RS 485 – RS 232) o Protocolo TCP/IP, mediante cable, fibra óptica o micro-ondas.
Como trabaja el Detector ASIM Tri-Tech?
El detector ASIM mide la velocidad del vehículo por medio del corrimiento de frecuencias de las microondas reflejadas detectadas por el Radar Doppler. La sección ultrasónica escanea el perfil en altura del vehículo que pasa debajo del detector, mientras que la cortina multicanal del detector infrarrojo da información sobre la posición del vehículo dentro del carril. El detector ASIM se monta fácilmente en puentes u otras estructuras elevadas que pasen por encima de los carriles a monitorizar. Unas extraordinarias prestaciones y estabilidad se consiguen como estándar gracias a:
• Tres independientes tecnologías en una sola unidad. Sistema de procesamiento de señal redundante (DSP) con parámetros adaptativos.
• Completa compensación en temperatura. Aplicaciones
La combinación de detectores ASIM son ideales para una amplia variedad de aplicaciones de adquisición de datos de tránsito y para aplicaciones de control en las que se utilizaban lazos inductivos.
• Clasificación vehicular en categorías según modelos • Conteo de todo tipo de vehículos • Velocidad individual de cada vehicular • Detección de presencia y de colas • Ocupacion, distancia y tiempo entre vehiculos Modelos standard TT 292 MW, US & PIR (2 Clases) TT 293 MW, US & PIR (2+1 Clases) TT 295 MW, US & PIR (5+1 Clases) TT 298 MW, US & PIR (8+1 Clases)
Documentación: www.info.tyssatransito.com [email protected] ASIM_Serie_290 (.pdf 1,273 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 16 428
APLICACIÓN DE DETECTORES ELEVADOS EN VIAS URBANAS PARA AFOROS Y DETECCION DE VELOCIDAD
DETECTORES ELEVADOS DE DATOS DE TRANSITO (AFOROS, CLASIFICACION, VELOCIDAD, OCUPACION)
Ejemplo de datos por carril
No Hora Vel. Lon. Clase Tiempo Gap Headway No Det. hh:mm:ss km/h m ocup. m seg Orden
2; 17:4:39; 80; 4.5; 1; 0.24; 1.92; 00; 1482; 2; 17:4:42; 102; 4.5; 1; 0.16; 3.56; 00; 1483; 2; 17:4:46; 100; 5.1; 1; 0.20; 2.88; 00; 1484; 2; 17:4:47; 96; 4.8; 1; 0.20; 1.36; 00; 1485; 2; 17:4:49; 76; 3.3; 1; 0.16; 1.60; 00; 1486; 2; 17:4:50; 88; 5.1; 1; 0.24; 1.00; 00; 1487; 2; 17:4:55; 75; 21.5; 4; 1.08; 2.83; 00; 1488; 2; 17:4:56; 72; 3.7; 1; 0.24; 1.64; 00; 1489; 2; 17:4:57; 72; 3.7; 1; 0.24; 0.36; 00; 1490; 2; 17:4:58; 82; 4.5; 1; 0.20; 1.20; 00; 1491; 2; 17:05:4; 80; 4.5; 1; 0.24; 5.51; 00; 1492; 2; 17:05:07; 79; 4.3; 1; 0.24; 2.28; 00; 1493; 2; 17:05:13; 100; 4.6; 1; 0.15; 6.39; 00; 1494;
Documentación: www.info.tyssatransito.com [email protected] ASIM_Serie_290 (.pdf 1,273 KB)
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 17
4 DETECTORES ELEVADOS DE DATOS DE TRANSITO
43. SISTEMAS DE DETECCION Y CONTROL DE VELOCIDAD DE VEHICULOS
HAY NUMEROSOS PROCEDIMIENTOS PARA DETERMINAR LA VELOCIDAD DE LOS VEHICULOS EN CIRCULACION. ESTAN LOS QUE PODRIAMOS DENOMINAR DE “BASE FIJA” Y LOS DE TIPO RADAR. LOS PRIMEROS SON SIEMPRE SISTEMAS FIJOS. LOS SEGUNDOD PUEDEN SER SISTEMAS FIJOS O SISTEMAS PORTATILES.
LOS SISTEMAS DE “BASE FIJA” CONSISTEN EN DOS SENSORES DE EJES COLOCADOS EN EL SUELO A UNA DISTANCIA CONOCIDA (PIEZOELECTRICO, A FIBRA OPTICA, TUBOS NEUMATICOS, Y CON CIERTA LIMITACIONES, HASTA LAZOS INDUCTIVOS) Y MEDIR EL TIEMPO QUE UNA MISMA RUEDA TARDA EN PASAR POR ENCIMA DE ELLOS. TAMBIEN SE PUEDEN UTILIZAR DOS RAYOS (INFRARROJOS, LASER, VISIBLES) Y DETERMINAR DE IGUAL MANERA EL TIEMPO QUE TARDAN EN SER INTERRUMPIDOS POR EL FRENTE DEL VEHICULO.
LOS SISTEMAS TIPO RADAR SE BASAN EN EMITIR UNA RADIACIÓN ELECTROMAGNETICA SOBRE UN VEHICULO Y ANALIZAR LA ONDA REFLEJADA. FUNDAMENTALMENTE SON DE DOS TIPOS: “ MICRO-ONDAS”, QUE SE BASAN EN EL CAMBIO DE FRECUENCIA DE LA ONDA REFLEJADA (EFECTO DOPPLER); Y “LASER”, QUE EN REALMENTE MIDEN DISTANCIAS (EN BASE A LA DURACION DEL TRAYECTO DEL RAYO Y DE SU REFLEJADO, CUYA VELOCIDAD CONOCEN); MIDIENDO DOS DISTANCIAS CONSECUTIVAS CALCULAN LA VELOCIDAD, PRÁCTICAMENTE TAMBIEN EN TIEMPO REAL.
OTROS SISTEMAS UTILIZAN OTRO TIPO DE ONDAS, COMO LAS ONDAS SONORAS, DE VELOCIDAD CONOCIDA. 431 Sistemas “Radar / Láser / Lidar “ para determinación de la velocidad de los vehículos 432. Sistemas radar fijos para control de velocidad (aviso) en vías urbanas e interurbanas 433. Sistemas radar fijos para control de velocidad (aviso) en vías urbanas e interurbanas 434 Sistemas radar fijos para control de velocidad (fotografía) en vías urbanas e interurbanas 435 Sistemas radar fijos para determinación de velocidad desde vehículos policiales 436 Sistemas radar portátiles (pistolas) para determinación de velocidad de los vehículos 437. Sistemas láser portátiles (pistolas) para determinación de velocidad de los vehículos 438. Esquema de sistema lidar( o radar) para control de la velocidad desde patrulla policial 439. Componentes de sistema lidar o radar para control de la velocidad desde patrulla policial

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 18 431
SISTEMAS “RADAR / LASER / LIDAR “ PARA DETERMINACION DE LA VELOCIDAD DE LOS VEHICULOS
RADAR Acronimito de RAdio Detection And Rangig, sensor remoto que emite ondas electromagnéticas (radio, microondas, luz) en orden a medir situación, presencia, movimiento., etc..
RADAR A MICROONDAS (año 1947) RADAR A LASER (LIDAR) (año 1995) Emite microondas en forma continua y se determina la Se emiten pulsos de luz en el rango de longitud de onda velocidad del vehículo seleccionado por la variación de de 94 nm, mediante un diodo láser. Se mide el tempo frecuencia de la onda reflejada (mas aguda cuando el que el pulso tarda en regresar para determinar distancia. vehículo se acerca y mas grave cuando se aleja, según La variación de distancia dada por pulsos consecutivos el principio Doppler-Fizeau). permite calcular la velocidad. Magnitudes: Magnitudes: Mide velocidad, con el equipo estacionario o móvil. Mide velocidad y distancia, con el equipo estacionario. Bandas de frecuencia utilizadas: Homónimos y sus acronímicos: Radar Banda S : 2.000 - 4.000 GHz, obsoleta LASER = Light Amplification by Stimulated Emissions of Radar Banda X : 10.500 - 10.550 GHz, desde 1965 Radiation. Radar Banda K : 24.050 - 24.250 GHz, desde 1976 LADAR = LAser Detection And Ranging Radar Banda Ka : 33.400 - 36.000 GHz, desde 1992 LIDAR = LIght Detection And Ranging Especificaciones: Especificaciones: Rango medida en velocidad: 30 a 200 Km/h Rango medida en velocidad: 0 a 250 Km/h Alcance: 500 m, aprox. Alcance: hasta 1000 m, aprox Precisión: +/ 1 digito Precisión: +/ 1 digito Tiempo de detección: 0.3 seg. Efecto coseno: Efecto coseno: Si no se mide en línea con la trayectoria del vehículo Si no se mide en línea con la trayectoria del vehículo el resultado que se obtiene es la velocidad del el resultado que se obtiene es la velocidad del vehículo multiplicada por el Angulo que forma su vehículo multiplicada por el Angulo que forma su trayectoria con la dirección de la medida. trayectoria con la dirección de la medida. Angulo de detección: Angulo de detección: Cono de emisión: ángulo total 12°, que corresponde a Cono de emisión: ángulo total 0.14°, que corresponde un circulo de diámetro 42 m a 200 m de distancia. Es a un circulo de diámetro 50 cm a 200 m de distancia. muy fácil enfocar, pero si hay varios vehículos en el El enfoque debe ser preciso, pero se puede seleccionar cono de visión dará informaciones erróneas. un vehículo aun en condiciones de transito muy intenso. Calibración: Calibración: - Método indirecto para calibración de velocidad: utilizar - Verificación de medida de distancia: utilizar distancias un diapasón con una frecuencia correspondiente a - Alineación del visor y del láser: se utilizan dos postes una determinada velocidad. telefónicos separados entre si 100 o 200 metros. - Método directo para calibración de velocidad: utilizar - Verificación de medida de velocidad: utilizar un vehículo un vehículo policial con velocímetro calibrado. policial con velocímetro calibrado. Principales ventajas: Principales ventajas: - Puede medir desde dentro del automóvil, parado o - Muy preciso. Puede medir la velocidad de un automóvil en marcha. identificándolo en un trafico muy denso. - Costo económico. - Largo alcance, hasta 1000 m o mas, según vehículo. Inconvenientes: Inconvenientes: - Muy sensible a interferencias. A veces puede estar - Precio elevado, 3 a 4 veces el coste del radar K o Ka. detectando la velocidad del ventilador del automóvil. - Solo pueden hacerse medidas con el equipo parado, - El haz de detección cubre varios carriles. Solo vale y desde fuera de un automóvil. La medición a través para vehículos aislados. del parabrisas daría valores erróneos.
Documentación: : www.info.tyssatransito.com [email protected] Radar_Laser_Lidar (.pdf 52 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 19 432
SISTEMAS RADAR FIIJOS PARA CONTROL DE VELOCIDAD (AVISO) EN VÍAS URBANAS E INTERURBANAS
Anuncios dinámicos sobre puentes de autoría
Anuncios informativos de exceso de velocidad
Detalle del visor (sistema "HUD")
RADAR PARA DETECCION DE VELOCIDAD
El radar para medir la velocidad de vehículos se desarrolló en Estados Unidos a finales de los años cincuenta y enseguida encontró notables aplicaciones prácticas, aunque todavía era muy inseguro por la baja frecuencia en la que trabajaba y la tecnología electrónica analógica.
El Radar consiste en un emisor de micro-ondas enviadas a la carretera que chocan con cualquier cuerpo que encuentran y regresan entrando en el mismo instrumento que emitió las ondas. Si el cuerpo con el que chocan es estacionario las ondas se reflejan con la misma frecuencia con la que fueron emitidas, pero si el cuerpo en el que se reflejan está en movimiento, la onda reflejada regresa con una frecuencia ligeramente diferente de la emitida (Efecto Doppler: la frecuencia se hace menor cuando el cuerpo se aleja y mayor cuando se acerca). Comparando las dos frecuencias se puede determinar la velocidad de movimiento del cuerpo que ha reflejado la onda Radar. Aplicaciones fijas para control de velocidad de circulación
Utilizando el pequeño detector que se presenta abajo (SI-2I) se puede limitar la velocidad en una autoría con anuncios en los que se indica la velocidad máxima permitida, y en forma variable, luminosa y con mayores caracteres se le informa al conductos de la velocidad a la que esta transitando en ese momento. Se pueden complementar estos anuncios con una toma de fotografía del vehículo, o del número de placa, para una posterior sanción.
La misma configuración se puede utilizar en anuncios situados en el acotamiento, o en carritos móviles. Estos anuncios son indicados particularmente para zonas urbanas, escuelas, zonas de construcción, puntos de alta peligrosidad, etc… Los caracteres del tablero dinámico podrán variar con la distancia de lectura requerida. Se puede sustituir, o complementar, el tablero dinámico informativo por luces LED flasheantes de hasta 12” de diámetro. La alimentación puede ser por red pública o mediante panel solar apoyado por baterías recargables. En aplicaciones portátiles y temporales se podrían utilizar solamente baterías recargables. Especificaciones RADAR SI-2
Tipo 24 GH Doppler, banda K Rango / Angulo 450 m / 12° Velocidad 3 - 322 Km/h Precisión +/- 0.1 Km/h Alimentación 10 a 24 VDC, Tamaño 20.3 cm largo x 7.6 cm diam. (0.73 Kg Salida RS 232
Otras aplicaciones: Se puede utilizar el radar para medir la velocidad de los vehículos, no con objeto de control, sino cuando, por ejemplo hay que corregir alguna magnitud, en función de la velocidad. En ese caso el rango de medida debe ser mas bajo.
Documentación: www.info.tyssatransito.com [email protected] RU2_Fast_250 (.pdf 200 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 20 433
APLICACIÓN DE RADAR EN VIAS URBANAS E INTERURBANAS CON INFORMACIÓN DE VELOCIDAD AL CONDUCTOR
Anuncios dinámicos sobre puentes de autoría
Anuncios informativos de exceso de velocidad
Detalle del visor (sistema "HUD"
RU2 FAST 250
RU2 Systems presenta su radar de velocidad con pantalla informativa montado sobre un único poste, que viene a cubrir los requerimientos para conseguir un transito mas tranquilo, eliminando la necesidad de instalar topes que tanto dañan los vehículos, y que además impiden la normal circulación de ambulancias, policías y otros vehículos de emergencias.
Montado en forma permanente o semipermanente, esta pantalla en LED de alta intensidad consigue la atención de los conductores que se aproximan. La alimentación de la pantalla se puede efectuar directamente del alumbrado urbano, o a través de un sistema de generación de electricidad mediante panel solar. Estas pantallas presentan las señales en formato de matriz completa con LED de alta intensidad y caracteres de 12” de alto (300 mm). El carácter de 12” es apropiado para velocidades de hasta 80 Km/h, y es legible desde 250 m. Presenta la velocidad en millas o Km por hora. PANTALLA DE “SU VELOCIDAD” + “VELOCIDAD MAXIMA”
El RU2 Fast 400 es una versión del RU Fast 250 que incluye una pantalla adicional, colocada encima o debajo de la pantalla de la pantalla de indicacion de la velocidad del vehiculo que se aproxima, una pantalla con información de la velocidad máxima autorizada, siendo esta ultima una señal ajustable. Esta señal es ideal para zonas escolares, zonas en construcción o calles donde el límite de velocidad cambia con regularidad. Aunado a esto, varias alertas de violación están disponibles incluyendo una señalización con un flasheo en barras rojo / azul, particularmente efectivo en la noche Si la limitación de velocidad es fija, en lugar de la señal variable de velocidad se puede colocar una señal fija indicando la limitación de velocidad en la zona. ALERTA DE VIOLACIÓN: Barras LED Rojas – Azules de 12”
La pantalla esta equipada con unas barras horizontales rojas y azules mediante LEDS de alta intensidad luminosa que lucen alternativamente a impulsos simulando la barra luminosa de un coche patrulla. Esta alerta de violación es particularmente útil por la noche. La alarma se activa por un vehiculo excediendo la velocidad seleccionada por el operador, en incrementos de 1.5 Km/h. Cuando el radar detecta una velocidad por encima de lo establecido, se activa la alarma. El violador ve falsear las luces rojas y azules en la pantalla, que en esos momentos no presenta el valor de la velocidad. SI el violador disminuye su velocidad, el flasheo de las luces desaparecerá y se mostrara de nuevo su velocidad. Si la velocidad sigue disminuyendo hasta por debajo del límite establecido por el operador, la pantalla continuara mostrando la velocidad que esta siendo registrada. Pero si el violador, a pesar de haber disminuido su velocidad continúa manteniendo una velocidad por encima del límite establecido, el flasheo de las luces se reanudara
Documentación: www.info.tyssatransito.com [email protected] RU2_Fast_250 (.pdf 200 KB)
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 21 434
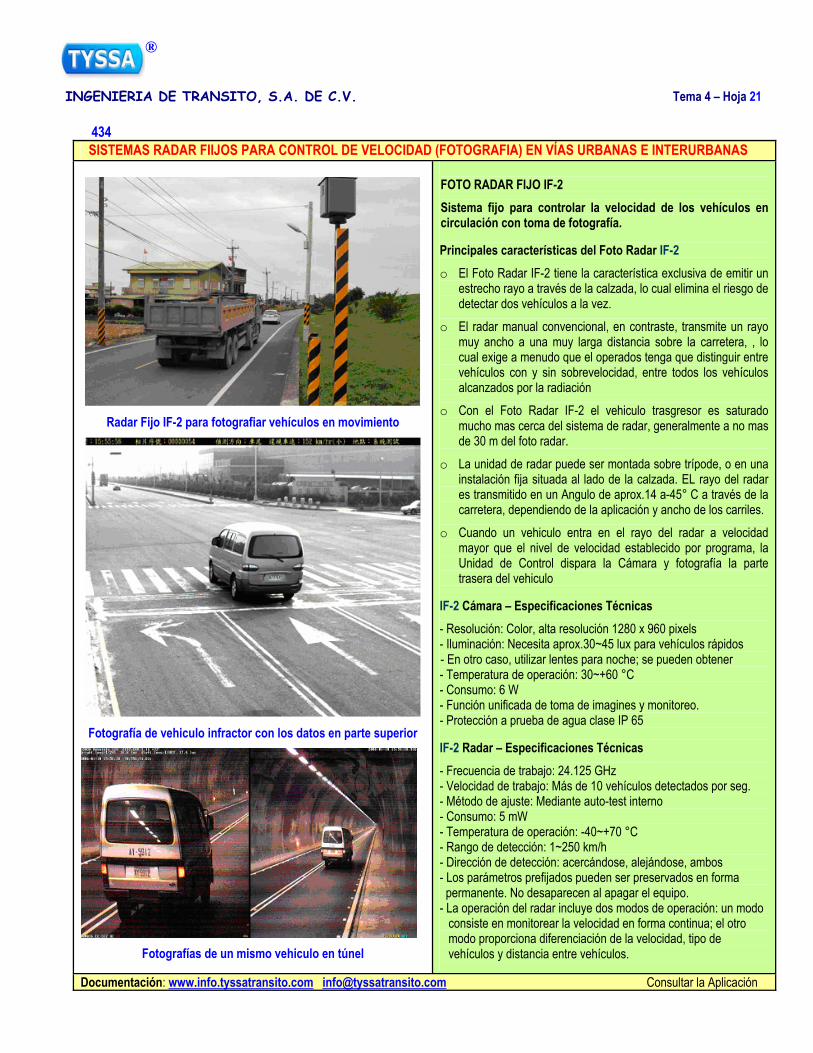
SISTEMAS RADAR FIIJOS PARA CONTROL DE VELOCIDAD (FOTOGRAFIA) EN VÍAS URBANAS E INTERURBANAS
Radar Fijo IF-2 para fotografiar vehículos en movimiento
Fotografía de vehiculo infractor con los datos en parte superior
Fotografías de un mismo vehiculo en túnel
FOTO RADAR FIJO IF-2
Sistema fijo para controlar la velocidad de los vehículos en circulación con toma de fotografía. Principales características del Foto Radar IF-2
o El Foto Radar IF-2 tiene la característica exclusiva de emitir un estrecho rayo a través de la calzada, lo cual elimina el riesgo de detectar dos vehículos a la vez.
o El radar manual convencional, en contraste, transmite un rayo muy ancho a una muy larga distancia sobre la carretera, , lo cual exige a menudo que el operados tenga que distinguir entre vehículos con y sin sobrevelocidad, entre todos los vehículos alcanzados por la radiación
o Con el Foto Radar IF-2 el vehiculo trasgresor es saturado mucho mas cerca del sistema de radar, generalmente a no mas de 30 m del foto radar.
o La unidad de radar puede ser montada sobre trípode, o en una instalación fija situada al lado de la calzada. EL rayo del radar es transmitido en un Angulo de aprox.14 a-45° C a través de la carretera, dependiendo de la aplicación y ancho de los carriles.
o Cuando un vehiculo entra en el rayo del radar a velocidad mayor que el nivel de velocidad establecido por programa, la Unidad de Control dispara la Cámara y fotografía la parte trasera del vehiculo
IF-2 Cámara – Especificaciones Técnicas
- Resolución: Color, alta resolución 1280 x 960 pixels - Iluminación: Necesita aprox.30~45 lux para vehículos rápidos - En otro caso, utilizar lentes para noche; se pueden obtener - Temperatura de operación: 30~+60 °C - Consumo: 6 W - Función unificada de toma de imagines y monitoreo. - Protección a prueba de agua clase IP 65 IF-2 Radar – Especificaciones Técnicas
- Frecuencia de trabajo: 24.125 GHz - Velocidad de trabajo: Más de 10 vehículos detectados por seg. - Método de ajuste: Mediante auto-test interno - Consumo: 5 mW - Temperatura de operación: -40~+70 °C - Rango de detección: 1~250 km/h - Dirección de detección: acercándose, alejándose, ambos - Los parámetros prefijados pueden ser preservados en forma permanente. No desaparecen al apagar el equipo. - La operación del radar incluye dos modos de operación: un modo
consiste en monitorear la velocidad en forma continua; el otro modo proporciona diferenciación de la velocidad, tipo de vehículos y distancia entre vehículos.
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 22 435
SISTEMAS RADAR FIJOS PARA DETERMINACIÓN DE VELOCIDAD DESDE VEHICULOS POLICIALES
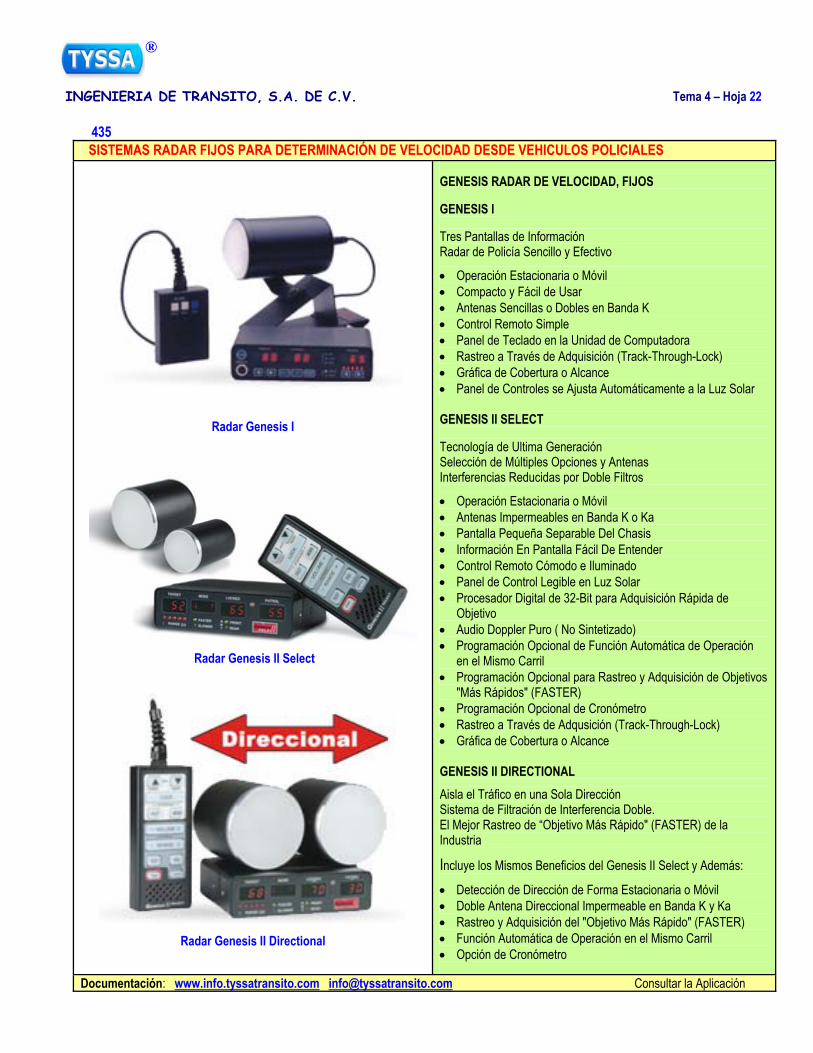
Radar Genesis I
Radar Genesis II Select
Radar Genesis II Directional
GENESIS RADAR DE VELOCIDAD, FIJOS GENESIS I Tres Pantallas de Información Radar de Policía Sencillo y Efectivo
• Operación Estacionaria o Móvil • Compacto y Fácil de Usar • Antenas Sencillas o Dobles en Banda K • Control Remoto Simple • Panel de Teclado en la Unidad de Computadora • Rastreo a Través de Adquisición (Track-Through-Lock) • Gráfica de Cobertura o Alcance • Panel de Controles se Ajusta Automáticamente a la Luz Solar GENESIS II SELECT Tecnología de Ultima Generación Selección de Múltiples Opciones y Antenas Interferencias Reducidas por Doble Filtros
• Operación Estacionaria o Móvil • Antenas Impermeables en Banda K o Ka • Pantalla Pequeña Separable Del Chasis • Información En Pantalla Fácil De Entender • Control Remoto Cómodo e Iluminado • Panel de Control Legible en Luz Solar • Procesador Digital de 32-Bit para Adquisición Rápida de
Objetivo • Audio Doppler Puro ( No Sintetizado) • Programación Opcional de Función Automática de Operación
en el Mismo Carril • Programación Opcional para Rastreo y Adquisición de Objetivos
"Más Rápidos" (FASTER) • Programación Opcional de Cronómetro • Rastreo a Través de Adqusición (Track-Through-Lock) • Gráfica de Cobertura o Alcance GENESIS II DIRECTIONAL
Aisla el Tráfico en una Sola Dirección Sistema de Filtración de Interferencia Doble. El Mejor Rastreo de “Objetivo Más Rápido" (FASTER) de la Industria
Incluye los Mismos Beneficios del Genesis II Select y Además:
• Detección de Dirección de Forma Estacionaria o Móvil • Doble Antena Direccional Impermeable en Banda K y Ka • Rastreo y Adquisición del "Objetivo Más Rápido" (FASTER) • Función Automática de Operación en el Mismo Carril • Opción de Cronómetro
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 23 436
SISTEMAS RADAR PORTATILES (PISTOLAS) PARA DETERMINACIÓN DE VELOCIDAD DE LOS VEHICULOS
Pistola Radar Genesis Direccional
Pistola Radar Genesis Versapak
Pistola Radar Genesis Versapak Direccional
RADARES DE VELOCIDAD, PORTATILES GENESIS HANDHELD DIRECCIONAL (PISTOLA PORTÁTIL)
Económico y Versátil • Tecnología Detectora de Dirección en un Formato Estacionario
y Fácil de Usar • Aisla el Tráfico en una Sola Dirección • Presentación de Objetivos Acercándose, Alejándose o Ambos • Rastreo y Adquisición del "Objetivo Más Rápido" (FASTER) • Procesador Digital de 32-Bit para Adquisición Rápida de
Objetivo • Antenas Direccionales en Banda K ó Ka • Excelente Alcance y Desempeño • Fuerte Carcasa de Policarbonato • Rastreo a Través de Adqusición (Track-Through-Lock) • Puerto de Comunicación para Conectar a Impresoras,
Computadoras y Pantallas de Señalización GENESIS VERSAPAKTM (PISTOLA PORTÁTIL)
Comodidad Redefinida Ergonomía Sobresaliente Diseño Cómodo y Bien Balanceado Alcance y Funcionamiento • Radar Estacionario Inalámbrico • Programación Opcional para Rastreo y Adquisición de "Objetivo
Más Rápido" (FASTER) • Sistema de Baterías Versapak de Black & Decker • Procesador Digital de 32-Bit para Adquisición Rápida de
Objetivo • Presentación de Lecturas del Objetivo • Pantalla Fácil de Leer con Teclado Iluminado • Rastreo a Través de Adqusición (Track-Through-Lock) • Frecuencia Banda K *Utiliza el Sistema de Batería VersaPakTM de Black & Decker” GENESIS VERSAPAKTM DIRECCIONAL (PISTOLA PORTÁTIL)
Radar Detector de Direccion Aisla Tráfico en una Sola Dirección Magnífico para Uso en Motocicleta Desempeño Excepcional Comprobado Incluye los Mismos Beneficios del Genésis VersaPakTM y además: • Antena Direccional En La Banda K o Ka • Presenta Objetivos Acercándose, Alejándose o Ambos *Utiliza el Sistema de Batería VersaPakTM de Black & Decker”
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 24 437
SISTEMAS LASER PORTATILES (PISTOLAS) PARA DETERMINACION DE VELOCIDAD DE LOS VEHICULOS
Pistola modelo SpeedLaser R
Midiendo la velocidad y/o la distancia de un vehículo
Pistola modelo SpeedLaser S
PISTOLA LASER PARA MEDIDA DE VELOCIDAD Y DISTANCIA
La Pistola Láser es un instrumento muy útil para determinar la velocidad de los vehículos y la distancia a un objetivo fijo o móvil, y es muy útil en la puesta a punto y en la calibración de muchos dispositivos de control vehicular.
Como detector de velocidad para propósitos de control carretero, el SpeedLaser R, detector de velocidad de alta precisión y largo alcance, se ha convertido en el equipo más utilizado por las policías y los departamentos oficiales en todo el mundo. Utiliza una emisión modulada de luz láser en la longitud de onda 94 nm, presenta un diseño óptimo para la misiones de vigilancia: muy resistente y ligero, muy fácil de aprender y más fácil aun de utilizar.
Dispone en su parte superior de un visor que permite ver simultáneamente el vehículo seleccionado y los datos de velocidad y de distancia, en tiempo real (sistema HUD). Una gran variedad de accesorios opcionales permiten su utilización en forma portable manual, pistola, o en forma fija al vehículo o motocicleta. El mango dispone de tornillo de montaje estándar ¼-20 para su adaptación a un trípode. Almacenamiento de datos flexible vía puerto serie RS 232 o mediante tarjetas de memoria PCMCIA.
Especificaciones
Tipo de luz Diodo Láser, 94 nm, Clase Láser Clase I (21 CFR 140.10 Precisión en medida de velocidad +/- 1.5 km/h Alcance de medida de velocidad 2.0 m a 800.0 m Alcance de medida en distancia 1.5 m a 5.0 km Tiempo de adquisición 0.3 seg Resolución 0.01 m Alimentación Batería Ni-Cad recargable Tiempo de recarga Aproximadamente 8 horas Temperatura de operación -10°C a +50°C Resistencia ambiental Estanco al agua Dimensiones 8.4 x 25.4 x 28.0 cm Peso 1.90 kg P/N (número de parte) 1095-90
Accesorios
Maleta de transporte: Incluye habitáculo para cable, cargador, 2 mangos, y equipo láser con visor monocular. Visor monocular: Magnifica 8X. Foco ajustable. P/N 1095D. Mango soporte: Con placa adaptadora a trípode con tornillo estándar roscado 1/4-20. Contiene las baterías recargables, y dispone de led indicador de alimentación. P/N 0597A. Cable RS 232 para conexión a computador Tarjeta PCMCIA de 2 M SRAM Cargadores: Para alimentación desde 120VAC. El modelo SpeedLaser S difiere del modelo R solo en el tipo de caja. El modelo R tiene caja metálica y el S de policarbonato.
Documentación: www.info.tyssatransito.com [email protected] Pistola_Laser_R (.pdf 283 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 25 438
ESQUEMA DE SISTEMA LIDAR (O RADAR) PARA CONTROL DE LA VELOCIDAD DESDE PATRULLA POLICIAL
Sistema Láser-Lidar para el control de velocidad desde patrulla
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 26 439
COMPONENTES DE SISTEMA LIDAR (O RADAR) PARA CONTROL DE LA VELOCIDAD DESDE PATRULLA POLICIAL
Sistema Láser-Lidar para el control de velocidad desde patrulla
Sistema Radar que puede utilizarse en lugar del Sistema Lidar
Fotos y datos obtenidos con el Sistema Lidar
QUE ES FOTO LIDAR?
Foto-LIDAR es la nueva generación que esta sustituyendo a los antiguos sistemas Foto-RADAR. LIDAR utiliza un DIodo Láser pulsante IR para medir velocidad, distancia y dirección. Utilizando un ancho de menos de un grado, el nivel de precisión que se alcanza no es conseguible con los antiguos sistemas de radar. Aunque el rayo atraviesa los carriles del trafico, puede ser dirigido sobre un vehiculo determinado cada vez minimizando la posibilidad de falsas lecturas.
El rayo puede también ser concentrado sobre los vehículos situados dentro de un conjunto de distancias especificadas El LIDAR también puede decir si el vehiculo esta alejándose o acercándose.. también se puede configurar el sistema para detectar los vehículos que circulen solo en un determinado sentido.
En el sistema Foto LIDAR la unidad es montada conjuntamente con una cámara de video digital de alta definición y con un computador de tipo móvil. Todo el equipo es instalado en un vehiculo policial, aunque también podría ser utilizado independientemente. Se toma una foto del vehiculo infractor tanto por delante (frente) como por detrás (placa). también se pueden registrar y aforar vehículos no infractores solamente para propósitos demográficos o estadísticos. El almacenamiento de datos es completamente digital, no se utiliza película ni cinta. Foto LIDAR es un sistema completo
El Sistema Auto-Trax es mas que un sistema. El Oficial que opera la parte movil del sistema es la persona responsable para la captura de los datos fisicos de la infraccion, y el personal del centro de operación es el responsable de la edicion y envio de los avisos o sanciones. El software para el centro de operación proporciona un soporte total para la emision de reportes, estados financieros, estadisticas y toda la documentación complementaria establecida. Proporciona un seguimiento completo e información fotografica del vehiculo que ha cometido la infraccion y de los vehiculos relacionados. Beneficios del Foto LIDAR
• Software de utilización muy amigable, que genera citaciones, avisos, reportes, gráficos, información demográfica y financiera.
• Control muy preciso del rayo láser. • El sistema se paga a si mismo en menos de 3 meses. Limitaciones de la tecnología LÍDAR
• Es una pistola que siempre se debe apuntar contra objetivos móviles, lo cual, aunque es gratificador al inicio, a lo largo del tiempo cansa porque es “manual” y no automático.
• Riesgo de la individualidad del operador, el cual puede elegir entre categorías de vehículos multando sólo algunos tipos.
Documentación: www.info.tyssatransito.com [email protected] Consultar la Aplicación
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 27
4 DETECTORES ELEVADOS DE DATOS DE TRANSITO
44.- SISTEMA DE CAPTACIÓN DE NUMERO DE PLACA EN CONDICIONES DE FLUJO LIBRE
“CARMEN FLUJO LIBRE” ES UNA TECNOLOGÍA INNOVADORA DE IDENTIFICACIÓN PARA VIGILANCIA DEL TRÁFICO, RECAUDACIÓN DEL PEAJE, GESTIÓN DEL TRÁFICO Y OTRAS MUCHAS APLICACIONES EN LAS QUE SON FUNDAMENTALES LA EXACTITUD, LA VELOCIDAD Y LA AUTOMATIZACIÓN DE LA TOMA DE DATOS. DEBIDO A SU TECNOLOGÍA EXCELENTE, A SU ALTO ÍNDICE DE LA EXACTITUD, A LA VELOCIDAD DEL PROCESO DE IMAGEN Y A SU ADAPTABILIDAD, “CARMEN FLUJO LIBRE” ESTÁ ENTRE LOS MEJORES DE SU CLASE. ADEMÁS DE SU CAPACIDAD PARA LEER LOS CARACTERES LATINOS
EL “CARMEN FLUJO LIBRE” OFRECE UN SISTEMA DE PROPÓSITO GENERAL PARA LA LECTURA DEL NÚMERO DE PLACA A PARTIR DE UNA IMAGEN DIGITAL DE CUALQUIER PROCEDENCIA. TANTO SI LO QUE SE PROPORCIONA COMO ENTRADA (DE ARCHIVO O DE MEMORIA O VIVO) TIENE UN MEGAPIXEL DE TAMAÑO, O ES UNA IMAGEN DIGITAL DE ALTA RESOLUCIÓN O UN CUADRO DE VIDEO CCTV EN COLOR DE TAMAÑO 384 X 288, “CARMEN®” PROPORCIONARÁ LA LECTURA BALANCEADA DE LAS PLACAS DEL COCHE.
AUNQUE HAY UNA AMPLIA DISPONIBILIDAD PARA ESTABLECER DIVERSAS CONFIGURACIONES - USTED PUEDE FIJAR LIBREMENTE LOS PARÁMETROS DE TRABAJO DE CARMEN® PARA CUMPLIR LO MEJOR POSIBLE CON LOS REQUISITOS DE SU SISTEMA REAL - USTED NO NECESITA SER UN EXPERTO EN EL AJUSTE DE LOS PARÁMETROS DEL SISTEMA: CARMEN® ES LO BASTANTE INTELIGENTE PARA PROPORCIONAR UN RECONOCIMIENTO DE LA PLACA DEL COCHE DE ALTA CALIDAD PARA MUY DIVERSO TIPO DE IMÁGENES Y DE PLACAS, ESTABLECIENDO LOS AJUSTES POR DEFECTO. HAY SISTEMAS AUTOMÁTICOS DEL RECONOCIMIENTO DE LA MATRÍCULA SOPORTADOS POR CARMEN® CON UNA TASA DE RECONOCIMIENTO DEL 98.5% (LECTURA CORRECTA / NÚMERO TOTAL DE ENTRADAS) CON 24 H DE TRABAJO/DÍA, 7DIAS/SEMANA.
ES IMPORTANTE TENER EN CUENTA QUE EL SOFTWARE “CARMEN FLUJO LIBRE” NO ES UN PROGRAMA DE APLICACIÓN, SINO UN “SDK” (SOFTWARE DEVELOPMENT KIT), KIT DE DESARROLLO DE SOFTWARE, QUE ES UN CONJUNTO DE HERRAMIENTAS DE DESARROLLO QUE LE PERMITEN A UN PROGRAMADOR CREAR APLICACIONES PARA UN SISTEMA CONCRETO.
441. Sistema ANPR (reconocimiento de numero de placa) en condiciones de flujo libre 442 Sistema ANPR (reconocimiento de numero de placa) desde vehiculo policial 443 Sistema dual (captura de numero de placa + video vigilancia) desde vehiculo policial
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 28 441
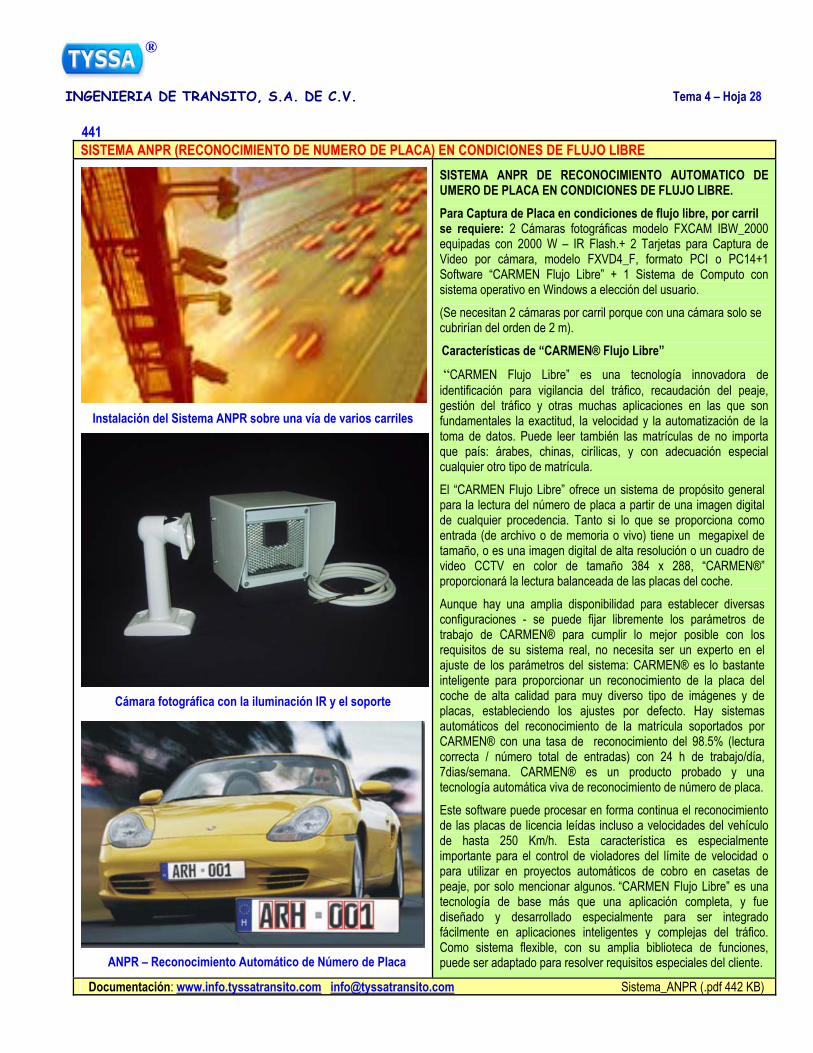
SISTEMA ANPR (RECONOCIMIENTO DE NUMERO DE PLACA) EN CONDICIONES DE FLUJO LIBRE
Instalación del Sistema ANPR sobre una vía de varios carriles
Cámara fotográfica con la iluminación IR y el soporte
ANPR – Reconocimiento Automático de Número de Placa
SISTEMA ANPR DE RECONOCIMIENTO AUTOMATICO DE UMERO DE PLACA EN CONDICIONES DE FLUJO LIBRE.
Para Captura de Placa en condiciones de flujo libre, por carril se requiere: 2 Cámaras fotográficas modelo FXCAM IBW_2000 equipadas con 2000 W – IR Flash.+ 2 Tarjetas para Captura de Video por cámara, modelo FXVD4_F, formato PCI o PC14+1 Software “CARMEN Flujo Libre” + 1 Sistema de Computo con sistema operativo en Windows a elección del usuario.
(Se necesitan 2 cámaras por carril porque con una cámara solo se cubrirían del orden de 2 m).
Características de “CARMEN® Flujo Libre”
“CARMEN Flujo Libre” es una tecnología innovadora de identificación para vigilancia del tráfico, recaudación del peaje, gestión del tráfico y otras muchas aplicaciones en las que son fundamentales la exactitud, la velocidad y la automatización de la toma de datos. Puede leer también las matrículas de no importa que país: árabes, chinas, cirílicas, y con adecuación especial cualquier otro tipo de matrícula.
El “CARMEN Flujo Libre” ofrece un sistema de propósito general para la lectura del número de placa a partir de una imagen digital de cualquier procedencia. Tanto si lo que se proporciona como entrada (de archivo o de memoria o vivo) tiene un megapixel de tamaño, o es una imagen digital de alta resolución o un cuadro de video CCTV en color de tamaño 384 x 288, “CARMEN®” proporcionará la lectura balanceada de las placas del coche.
Aunque hay una amplia disponibilidad para establecer diversas configuraciones - se puede fijar libremente los parámetros de trabajo de CARMEN® para cumplir lo mejor posible con los requisitos de su sistema real, no necesita ser un experto en el ajuste de los parámetros del sistema: CARMEN® es lo bastante inteligente para proporcionar un reconocimiento de la placa del coche de alta calidad para muy diverso tipo de imágenes y de placas, estableciendo los ajustes por defecto. Hay sistemas automáticos del reconocimiento de la matrícula soportados por CARMEN® con una tasa de reconocimiento del 98.5% (lectura correcta / número total de entradas) con 24 h de trabajo/día, 7dias/semana. CARMEN® es un producto probado y una tecnología automática viva de reconocimiento de número de placa.
Este software puede procesar en forma continua el reconocimiento de las placas de licencia leídas incluso a velocidades del vehículo de hasta 250 Km/h. Esta característica es especialmente importante para el control de violadores del límite de velocidad o para utilizar en proyectos automáticos de cobro en casetas de peaje, por solo mencionar algunos. “CARMEN Flujo Libre” es una tecnología de base más que una aplicación completa, y fue diseñado y desarrollado especialmente para ser integrado fácilmente en aplicaciones inteligentes y complejas del tráfico. Como sistema flexible, con su amplia biblioteca de funciones, puede ser adaptado para resolver requisitos especiales del cliente.
Documentación: www.info.tyssatransito.com [email protected] Sistema_ANPR (.pdf 442 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 29 442
SISTEMA ANPR (RECONOCIMIENTO DE NUMERO DE PLACA) DESDE VEHICULO POLICIAL
Exterior de vehiculo policial equipado con sistema ANPR
Sistema ANPR en el interior de un vehiculo policial
Componentes del Sistema ANPR para vehículos policiales
SISTEMA “FXPU4 MOBIL ANPR” PARA USO POLICIAL
Especialmente diseñado para la aplicación de Reconocimiento Automático de Numero de Placa para
aplicaciones de control policial. Incorpora Cámara día/noche con Flash IR, Radar para determinación de Velocidad y Trigger para disparo de cámara. Tarjeta para Captura de
Video, Software “CARMEN Flujo Libre”, Sistema de posicionamiento satelital GPS, sistema de conexión para
transmisión de datos vía celular GSM/GRPS
El Sistema “Carmen Mobile ANPR Unit” ha sido diseñado especialmente para soportar ANPR (reconocimiento automático del numero de placa) desde vehículos móviles. El computador “Carmen Mobile ANPR Unit” se fija en el salpicadero del vehículo para aplicaciones a bordo. Este computador utiliza una pantalla táctil inteligente. Como los sistemas de calefacción y de mantenimiento están incorporados, el equipo está protegido contra condiciones extremas de ambiente y de comportamiento mecánico. La Unidad Mobile ANPR esta específicamente dedicada para propósitos de control y vigilancia en carreteras.
El sistema toma automáticamente las imágenes de los vehículos que circulan, y localiza y lee el numero de placa de las imágenes capturadas utilizando el software “CARMEN FreeFlow ANPR”. Este software es capaz de reconocer casi cualquier número de placa en el mundo. El resultado del reconocimiento del número de placa se da en código ASCII. Los datos capturados en la carretera pueden ser transmitidos vía GSM/GPRS mediante la conexión integrada en el equipo. También incorpora el equipo un sistema GPS que proporciona la posición. Todos estos datos pueden ser enviados a un servidor central para posterior procesamiento o verificación.
Típicas áreas de utilización son::
· Coches de Policía · Estaciones de gasolina · Conteo de trafico · Control de velocidad
Especificaciones técnicas del Sistema “FXPU4 Mobil ANPR”
- Procesador: Pentium III 500 MHz, Procesador incorporado 64MHz Multimedia, Tarjeta incorporada FXVD4 (formato PC14 - Memoria RAM: 128 MB RAM tipo SO-DIMM, expandible a 384 MB - Disco Duro: I30 - 40 GB HDD interno, línea fina, Procesador & I2C controlado con precalentamiento y enfriamiento - CD-ROM/DVD/CD-R: Opciones: CD-ROM drive, DVD drive o CD- R drives, internos linea fina - Navegación: Receptor GPS integrado, norma NMEA: VTG, RMC, GGA, GSA, GSV - Comunicación Datos: Comunicación GPRS interna - Preparado para PC/14+ PCI: Tarjeta Multicanal para entrada de Video. - Entrada Multiple de Video en MPEG Codificado - Radio receptores TV & RDS y 1 entrada Video - PC-Card/CardBus Slot
Documentación: www.info.tyssatransito.com [email protected] Sistema_ANPR (.pdf 442 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 30 442
SISTEMA DUAL (CAPTURA DE NUMERO DE PLACA + VIDEO VIGILANCIA) DESDE VEHICULO POLICIAL
Exterior de vehiculo policial equipado con sistema video y ANPR
Sistema ANPR en el interior de un vehiculo policial
Sistema de suspensión del videograbador
SISTEMA DE MONITORIZACIÓN DE VIDEO DESDE VEHICULO POLICIAL: SISTEMA DUAL QUE INCORPORA CAPTACIÓN DE NUMERO DE PLACA Y OTRAS UTILIDADES
El DUAL es un sistema de videovigilancia que incorporan vehículos de la Policías de Transito en numerosos países. Se emplea para grabar en vídeo infracciones de tráfico en general. Puede funcionar tanto de día como de noche y en condiciones meteorológicas adversas, incluida la lluvia intensa.
A diferencia de los otros sistemas de monitorización por vídeo en vehículos, el sistema Dual es capaz de orientar el objetivo casi 360º en horizontal (5° hasta 350°) y 90º en vertical, lo que permite al agente elegir cualquier posición de visionado. Es decir, que la cámara no esta fija grabando hacia delante o hacia atrás, sino que es orientarle y permite grabar cualquier dirección. De ahí que las cámaras estén en el exterior del vehículo sobre le techo y no en el interior como en otros sistemas.
El sistema posee una cámara de color con zoom óptico de 22X y uno zoom digital de 4X. De esta manera, el sistema es capaz de vigilar otras vias cercanas. Tanto la cámara para video color como la cámara para captación de numero de placa incorporan su propia iluminación IR (Infra-roja) que les permite grabar tanto de noche como de dia. El sistema lo maneja el copiloto mediante un monitor de pantalla táctil. El VideoGrabador Digital va montado sobre un sistema de suspensión muy robusto que aparece en la fotografía.
Software RHCar para la identificación de Vehículos
El sistema móvil de gestión de matrículas RHCar, se instala en unidades móviles para captura de datos e imágenes de denuncias a vehículos que se encuentren parados o estacionados indebidamente, vulnerando las disposiciones legales en materia de tráfico y circulación. El producto dispone de módulos para:
- supervisión zonas de estacionamiento regulado. - supervisión zonas de estacionamiento exclusivas para residentes. - automatización de sanciones en estacionamiento doble fila, carril bus y otras infracciones. - Sistema Información Geográfico para posicionamiento. - Listas negras de vehículos buscados - Comunicaciones con sistemas remotos; mediante GSM, GPRS, UMTS, Wiffi - Modulo de comunicaciones en servidor remoto. - Modulo de acceso a Base de Datos, para contrastar matrículas de interés y otros datos. - Transmisión de fotografía por GPRS-UMTS - Integración con sistema de lectura de huella (Opcional) Aplicaciones - Seguridad en zonas residenciales, grandes aparcamientos, - Sancionamiento de infracciones de tráfico: doble fila, carril bus, - Localización de vehículos sustraídos y perdidos. - Identificación y alarma de vehículos buscados en conexión con Centro de Control
Documentación: www.info.tyssatransito.com [email protected] Sistema_ANPR (.pdf 442 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 31
4 DETECTORES ELEVADOS DE DATOS DE TRANSITO
45.- SISTEMAS DE VIDEO – DETECCION Y RADIO TRANSMISION
LOS SISTEMAS DE VIDEO DETECCION QUE UTILIZAN ALGORITMOS PARA PROCESAMIENTO DE IMÁGENES Y EXTRAER DE ELLAS INFORMACIÓN PARA RECOLECCION DE DATOS DE TRANSITO, CONTROL DE VIALIDADES. GESTION DE INTERSECCIONES, DETECCION AUTOMATICA DE INCIDENTES, Y OTRAS APLICACIONES. LA DETECCION AUTOMATICA DE INCIDENTES SE HACE CADA VEZ MAS IMPRESCINDIBLPORQUE CADA VEZ SE INSTALAN MAS CAMARAS PARA LA VIGILANCIA DE NUESTRA CIUDADES E INFRAESTRUCTURAS CARRETERAS. RESULTA IMPENSABLE QUE ESA ENORME CANTIDAD DE INFORMACIÓN PUEDA SER EVALUADA EN TIEMPO REAL DE UNA FORMA SIMPLEMENTE VISUAL.
NUMEROSOS INCIDENTES PUEDEN SER PROGRAMADOS: VEHÍCULOS PARADOS, CONGESTIÓN DE TRANSITO, PEATONES EN LA CALZADA, VEHÍCULOS EN CONTRASENTIDO, VEHÍCULOS LENTOS, OBJETOS EN LA CALZADA, COLAS EXCEDIDAS, ETC.. TODAS ELLAS SON SITUACIÓN DE ESPECIAL ATENCIÓN POR EL PELIGRO POTENCIAL QUE SUPONEN, O POR HABER SIDO ORIGINADAS POR ALGUNA ACTUACIÓN PREVIA QUE ESTA FUERA DEL COMPORTAMIENTO NORMAL DE LOS CONDUCTORES, BIEN SEA ACCIDENTAL O PROVOCADA
LA TRANSMISIÓN DE LA INFORMACIÓN PARA ESTE TIPO DE APLICACIONES SE EFECTUA NORMALMENTE EN FORMATO TCP/IP POR MICRO-ONDAS, A FRECUENCIAS DE 2.4 GHz, 5.2 GHz, 5.8 GHz Y ANCHOS DE BANDA PARA TRANSFERENCIAS 10/100 Y OTRAS, SEGÚN LA TOPOLOGIA DE LA ZONA DE CAPTACIÓN.
451 Sistema de Detección Automática de Incidentes. 452 Sistemas de Video-Detección Inteligentes 453 Equipos utilizados en los Sistemas de Detección Automática de Incidentes 454 Sistema CCTV (Circuito Cerrado de Televisión) de tipo convencional. 455 Sistema de video digital en protocolo TCP/IP (Internet) desde la toma de señal 456 Sistema de radio a micro-ondas y modems telefónicos GPRS para transmisión de datos 457 Sistemas de transmisión de radio configurable para señales todo/nada y analógicas 458 Sistema de transmisión para señales de video / audio convencionales hasta 4 Km
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 32 451
SISTEMA DE DETECCION AUTOMATICA DE INCIDENTES CITILOG
Detección de incidentes en viaductos
Detección DIA y noche
Detección de incidente en vía rápida
MEDIAROAD Sistema de Detección Automática de Incidentes
VÍDEO DETECCIÓN La Vídeo Detección es una tecnología que permite la Detección Automática de Incidentes (DAI) y la recogida de datos de tráfico en las carreteras, avenidas y calzadas mediante procesamiento de imágenes de vídeo.
VENTAJAS DE LA VÍDEO DETECCIÓN La Vídeo Detección permite a los responsables de la seguridad de las vías de circulación:
• Una alarma inmediata y automática sobre detección de un evento anormal, antes que las consecuencias del incidente puedan ser advertidas por el operador o un sistema tradicional de vigilancia.
• Un análisis rápido de la situación para una toma de decisión inmediata y adecuada.
• Eliminar las restricciones impuestas por el uso de lazos: cierre de carriles para reparaciones/obras y deterioro de la calzada.
LOS SISTEMAS DE VIDEO DETECCION CITILOG La extrema fiabilidad del sistema DAI Citilog y el índice marginal de falsas alarmas permite una vigilancia totalmente automática.
El sistema DAI Citilog:
• Procesa las imágenes que proceden de cámaras de color o B/N. • Se basa en 15 años de experiencia en sitio. • Es totalmente flexible gracias a la configuración de las funciones de detección y medición. • Sólo utiliza equipos y componentes estándar (tarjetas, etc.). • Es modular y construido basándose en una arquitectura cliente-
servidor y protocolos de comunicación estándar. • Utiliza interfaces amigables, diseñadas con y para los operadores. • Dispone de una base de datos de secuencias de vídeo
relacionadas con los eventos (incidentes, petición de operador, petición del sistema de control de tráfico).
• Es operativo las 24 horas del día en cualquier tipo de carreteras y avenidas, en todas condiciones de transito o entorno (día / noche)
• Integra dispositivos elaborados de auto-diagnóstico.
ARQUITECTURA DEL SISTEMA
La arquitectura tradicional del sistema DAI está compuesta de analizadores de imágenes, de un servidor DAI y de un Computador de supervisión del sistema. Los analizadores DAI procesan el flujo analógico de las cámaras y comunican eventos hacia el Servidor DAI por medio de una red Ethernet.
• Analizadores DAI : Procesado de la imagen • Servidor DAI :Centralización e comunicación de las alarmas de
las secuencias y de las medidas de trafico • Supervisor DAI: Administración técnica y funcional del sistema y
visualización Secuencias
Documentación: www.tyssatransito.com [email protected] Consultar la aplicación

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 33 452
SISTEMAS INTELIGENTES DE VIDEO-DETECCION DE CITILOG
SISTEMAS INTELIGENTES DE VIDEO DETECCION La Video Detección utiliza algoritmos de tratamiento de imagen a fin de extraer las informaciones pertinentes provenientes de las señales de video de cámaras de vigilancia estándar o IP, blanco y negro o color., según la aplicación.
Citilog ha desarrollado algoritmos de procesamiento de imagen muy potentes, para aplicaciones especializadas, que funcionan en las más adversas condiciones ambientales, día y noche.
Estas aplicaciones pueden ser dimensionadas a la magnitud que sea requerida. La transmisión de la información se hace generalmente en formato IP a 5.8 MHz.
MediaRoad
DETECCION AUTOMATICA DE INCIDENTES RECOGIDA DE DATOS DE TRANSITO TIEMPO DE VIAJE DETECCION DE CONGESTION DE TRANSITO VIGILANCIA DE PEAJES ELECTRONICOS PEAJES EN LA SOMBRA NIVELES DE TRANSITO CONTROL DE ACCESOS CONTROL DE COLAS EN RAMPAS REGISTRO DE VIDEO DIGITAL
VisioPad
DETECCION AUTOMATICA DE INCIDENTES NO SE REQUIERE CONFIGURACIÓN PREVIA CALIBRACIÓN AUTOMATICA Y DINAMICA SE ADAPTA A CAMARAS FIJA O PAN-TILL-ZOOM SIN NECESIDAD DE POSICIÓN PRE-ESTABLECIDA TECNOLOGÍA DE CAMPO PROBADA COMPATIBLE CON SISTEMA CCTV IP Y ANALOGICOS INTEGRA REGISTRO EN VIDEO PRE & POST INCIDENTES REGISTRO DE VIDEO DIGITAL
MediaCity
GESTION DE LUCES DE TRANSITO DETECCION DE PRESENCIA CONTROL AVANZADO DE INTERSECCIONES DETECCION DE LONGITUD DE COLAS CONTROL DE RAMPAS. MediaTD DETECCION DE VOLUMEN DE TRANSITO MONITOREO DE CONGESTION TIEMPO DE VIAJE VOLÚMENES CLASIFICADOS PARA PEAJES RECOLECCION DE DATOS DE TRANSITO SIMULACIÓN DE LAZOS INDUCTIVOS.
Documentación: www.tyssatransito.com [email protected] Consultar la aplicacion

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 34 453
EQUIPOS UTILIZADOS EN LOS SISTEMAS DE DETECCIÓN AUTOMÁTICA DE INCIDENTES (DAI)
Cámara TV fija color, con carcasa intemperie
Analizador Sistema DAI para hasta 16 entradas
Sistema de transmisión Trango ATLAS FOX”
Servidor DAI Citilog
COMPONENTES DEL SISTEMA DAI
Los sistemas de video detección de incidentes están constituidos por una serie de elementos de mercado, ya que lo especifico de un sistema DAI son los algoritmos de tratamiento de la imagen. En orden descendente, los equipos a utilizar son:
Cámaras de video (de mercado)
Cámaras analógica, b/n o color, tipo analógico, montadas sobre postes en grupos de hasta 4 cámaras.
Analizadores (suministro Citilog, incluyendo software)
El Analizador es un Computador de tipo PC industrial en rack que se coloca en campo a pie de cámaras analógicas, y que contiene los algoritmos de tratamiento de imágenes. Deben ser compatibles con conexiones tipo Ethernet. Los analizadores están esencialmente constituidos por una unidad de cálculo, un sistema de numeración y un programa de procesamiento de imágenes. El algoritmo de procesado de la imagen trata 5 imágenes por segundo precedentes desde las cámaras. El Analizador tiene capacidad hasta para hasta 16 entradas provenientes de cámaras TV analógicas. Salida en formato TCP/IP.
Transmisión de información (de mercado)
Siempre en micro-ondas, protocolo TCP/IP, en enlaces punto a punto o punto a multipunto, formando redes y subredes, según la topología de la aplicación. Los equipamientos mas usuales son:
- Emisores ATLAX FOX, en 5.8 MHz y 10 Mbps, TCP/IP, 10 millas, con antena disco con Receptores ACCESS 5830, en 5.8 MHz y 10 Mbps, TCP/IP, 10 millas.
- Emisores ATLAX P4900M, en 4.9 MHz y 45 Mbps, TCP/IP, 15 millas, con antena disco y Receptores ATLAX P4900M, en 4.9 MHz y 45 Mbps, TCP/IP, 15 millas, con antena disco
Servidor DAI (suministro Citilog, incluyendo software)
El servidor tendrá que ser compatible con conexiones de tipo Ethernet. Sus tareas serán:
• Comunicación con los analizadores • Centralización de datos (alarmas, mediciones de tráfico,
secuencias de imágenes) y comunicación con el Sistema de Gestión del túnel
• Auto testeo del sistema • Mantenimiento y supervisión técnicas de los equipos • Configuración del sistema DAI: parámetros, configuración, de las
mascaras, activación o inhibición de pistas o de cámaras
Equipo informático convencional en sala de control
El equipo informático de la sala de control depende de la aplicación y de las necesidades del usuario. Hará falta un computador de control, convertidores de IP a señal analógica, quads, monitores, etc., además de los dispositivos necesarios para la red IP.
Documentación: www.tyssatransito.com [email protected] Consultar la aplicacion

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 35 454
SISTEMA CCTV (CIRCUITO CERRADO DE TELEVISION) DE TIPO CONVENCIONAL
Cámaras convencionales y de tipo Domo
Multiplexores color de 9 y 16 canales
Registradores digitales (1 o 4 can.) y “time lapse”
Esquema general de una instalación CCTV
CCTV PARA MONITORIZACION DEL TRANSITO
Sistemade cir cuito cerrado de televisión para monitorización del transito en intersecciones y avenidas, sustitución de lazos inductivos para control de luces de transito, etc..
VIDEO CÁMARA DE DETECCIÓN DE ALTA CALIDAD: Cámara monocromática fija que sido diseñada específicamente para sistemas automáticos de control del transito y detección de incidencias. Opción inalámbrica y opción de alimentación a baterías. Cámara de enfoque de longitud variable ideal para cualquier aplicación Fácil de instalar sin necesidad de cerrar carriles de trafico Protegida contra el sol o cualquier tipo de cambios climatológicos Ideal para instalaciones temporales o permanentes Produce imágenes de muy buena calidad y transmisión
CAMARA TIPO DOMO MOD. DC-100. Cámara a color o blanco y negro seleccionables para exterior, con control de movimientos horizontal y vertical, y de zoom.
Giro horizontal (Pan) 360° Giro vertical (Tilt) 360° Velocidad en giro horizontal: 600°/seg Velocidad en giro vertical: 300°/seg Cámaras: blanco&negro y color Zoom digital: 1X a 8X Zoom optic: 16X Zoom total: 1X a 128X AONDICIONADORES DE SEÑAL MOD. ML108A Y MOD. ML928. El ML 108A es un acondicionador de campo con excelente aislamiento a tierra que permite hasta 300 m de cable de baja perdida RG59. El acondicionador ML928 es amplificador/ ecualizador proporciona una salida de video de alta calidad mediante par cobre trenzado o cale coaxial, evitando tener que utilizar costosa fibra óptica. Proporciona 30 pantallas por segundo. MULTIPLEXORES A COLOR MOD. MP-9 Y MOD. MP-16. Trabajan con todas las cámaras y registradores existentes en el mercado. Proporcionan 720 x 480 líneas en pantalla completa, doble página o 4+4+4+4. CONTROLADOR DE 3 EJES MOD. SC-100. Se presenta en dos moleos: Botón y Joystick. Permite el control a través de RS 485 de monitores y cámaras (directamente o a través de multiplexor, según) hasta un total 66 equipos. REGISTRADORES DIGITALES DE 1 Y DE 4 CANALES MOD. DR-100 Y MOD.DR-400. Reemplazan directamente a los Registradores analógicos. Dispone de 27 GB por canal, siendo seleccionables la compresión y el numero de pantallas por segundo, lo que proporciona una capacidad de almacenamiento de hasta 690 horas. Disponible en configuraciones IDE y SCSI.
REGISTRADOR “TIME LAPSE” MOD. TLC2-100. Registra hasta 40 días con una cinta de video VHS.
Documentación: www.tyssatransito.com [email protected] Consultar la aplicacion
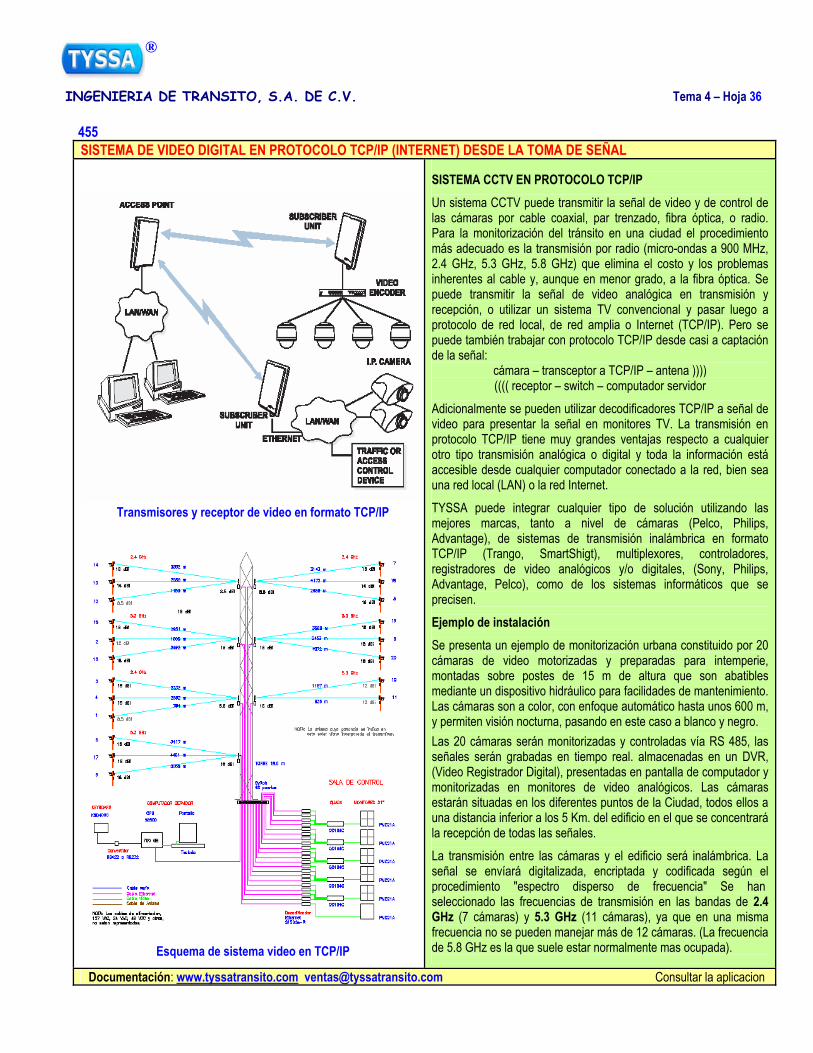
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 36 455
SISTEMA DE VIDEO DIGITAL EN PROTOCOLO TCP/IP (INTERNET) DESDE LA TOMA DE SEÑAL
Transmisores y receptor de video en formato TCP/IP
Esquema de sistema video en TCP/IP
SISTEMA CCTV EN PROTOCOLO TCP/IP
Un sistema CCTV puede transmitir la señal de video y de control de las cámaras por cable coaxial, par trenzado, fibra óptica, o radio. Para la monitorización del tránsito en una ciudad el procedimiento más adecuado es la transmisión por radio (micro-ondas a 900 MHz, 2.4 GHz, 5.3 GHz, 5.8 GHz) que elimina el costo y los problemas inherentes al cable y, aunque en menor grado, a la fibra óptica. Se puede transmitir la señal de video analógica en transmisión y recepción, o utilizar un sistema TV convencional y pasar luego a protocolo de red local, de red amplia o Internet (TCP/IP). Pero se puede también trabajar con protocolo TCP/IP desde casi a captación de la señal:
cámara – transceptor a TCP/IP – antena )))) (((( receptor – switch – computador servidor
Adicionalmente se pueden utilizar decodificadores TCP/IP a señal de video para presentar la señal en monitores TV. La transmisión en protocolo TCP/IP tiene muy grandes ventajas respecto a cualquier otro tipo transmisión analógica o digital y toda la información está accesible desde cualquier computador conectado a la red, bien sea una red local (LAN) o la red Internet.
TYSSA puede integrar cualquier tipo de solución utilizando las mejores marcas, tanto a nivel de cámaras (Pelco, Philips, Advantage), de sistemas de transmisión inalámbrica en formato TCP/IP (Trango, SmartShigt), multiplexores, controladores, registradores de video analógicos y/o digitales, (Sony, Philips, Advantage, Pelco), como de los sistemas informáticos que se precisen.
Ejemplo de instalación
Se presenta un ejemplo de monitorización urbana constituido por 20 cámaras de video motorizadas y preparadas para intemperie, montadas sobre postes de 15 m de altura que son abatibles mediante un dispositivo hidráulico para facilidades de mantenimiento. Las cámaras son a color, con enfoque automático hasta unos 600 m, y permiten visión nocturna, pasando en este caso a blanco y negro.
Las 20 cámaras serán monitorizadas y controladas vía RS 485, las señales serán grabadas en tiempo real. almacenadas en un DVR, (Video Registrador Digital), presentadas en pantalla de computador y monitorizadas en monitores de video analógicos. Las cámaras estarán situadas en los diferentes puntos de la Ciudad, todos ellos a una distancia inferior a los 5 Km. del edificio en el que se concentrará la recepción de todas las señales.
La transmisión entre las cámaras y el edificio será inalámbrica. La señal se envíará digitalizada, encriptada y codificada según el procedimiento "espectro disperso de frecuencia" Se han seleccionado las frecuencias de transmisión en las bandas de 2.4 GHz (7 cámaras) y 5.3 GHz (11 cámaras), ya que en una misma frecuencia no se pueden manejar más de 12 cámaras. (La frecuencia de 5.8 GHz es la que suele estar normalmente mas ocupada).
Documentación: www.tyssatransito.com [email protected] Consultar la aplicacion

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 37 456
SISTEMAS DE RADIO A MICROONDAS Y MODEMS TELEFONICOS GRPS PARA TRANSMISION DE DATOS
Radio Modem XStream-PKG
Radio Modem XCite-PKG Radio Modem XTend-PKG
NPort_520_RS232/TCP_Series Modem_Ethernet_900_MHz
Modem_GSM_Multitech Modem_Telefonico 56K_RS 485
Modem Modem GRPS Sony Ericson
TRANSMISION DE DATOS DE CAMPO A CENTRO DE CONTROL
Un Sistema de recolección de datos en campo necesita posteriormente transmitir de una u otra forma los datos a la Central. Tanto si se trata de un solo Sistema de recolección de datos como de varios, se pueden presentar las dos situaciones siguientes:
a) Se necesita disponer simultáneamente de todas las señales de campo en tiempo real. En este caso habrá que disponer de línea propia dedicada, ya que recurrir a redes de servicio público puede resultar muy oneroso.
b) Solo es necesario descargar los datos de cada Sistema a la Central una o dos o varias veces al día. Esta alternativa solo será valida cuando el Sistema disponga de algún método de almacenamiento de datos en campo. En este caso se puede recurrir a redes telefónicas publicas: telefonía convencional mediante módems telefónicos, o telefonía celular a microondas mediante modems GSM / GPRS allí donde exista esa cobertura.
La salida de datos de los sistemas de recolección de datos en campo son normalmente mediante interfaces RS 232, RS 422, RS 485. Estos interfaces son convertibles entre si, cuando sea necesario. Por ejemplo, una conexión vía RS 232 no puede ser transmitida por cable más allá de los 15 m. La conexión vía RS 485 se puede transmitir hasta los 1,200 m. Para mayores distancias necesitaremos fibra óptica o transmisión radio por micro-ondas, sin o con repetidores según se disponga o no de línea de vista.
Pero hay que tener cuidado con las conectividades, porque las interfases, aunque tengan el mismo nombre (RS 232, RS 485, etc..) pueden diferir en la topología del bus y en los protocolos.
Una alternativa cada vez mas utilizada es pasar los interfaces serie a protocolo TCP/IP que es el que se utiliza en las redes Ethernet e Internet, lo cual hará accesible la información desde cualquier punto de la red, siempre que haya un servidor que la este soportando. Puede bajarse la información de los dispositivos que se muestran.
RADIO MODEMS RF 900 MHz & 2,4 GHz
Los radio modems MaxStream han sido diseñados para proporcionar a los usuarios una forma fácil de disponer de un enlace serie inalámbrico. El modem que trabaja a 900 MHz proporciona un alcance de hasta 32 Km a la vista con antena de alta ganancia. El modem trabajando a 2,4 GHz proporciona un alcance de hasta 16 Km según el tipo de antena.
RADIO MODEM XStream-PKG
PKG-R PKG-U PKG-E PKG-T RS 232/422/485 USB Ethernet Teléfono
Modelos: a 900 MHz, con alcance hasta 32 Kms a 2.4 GHz, con alcance hasta 16 Kms
(Versiones OEM a 900 MHz y a 2.4 GHz)
Documentación: www.tyssatransito.com [email protected] Consultar la Aplicación
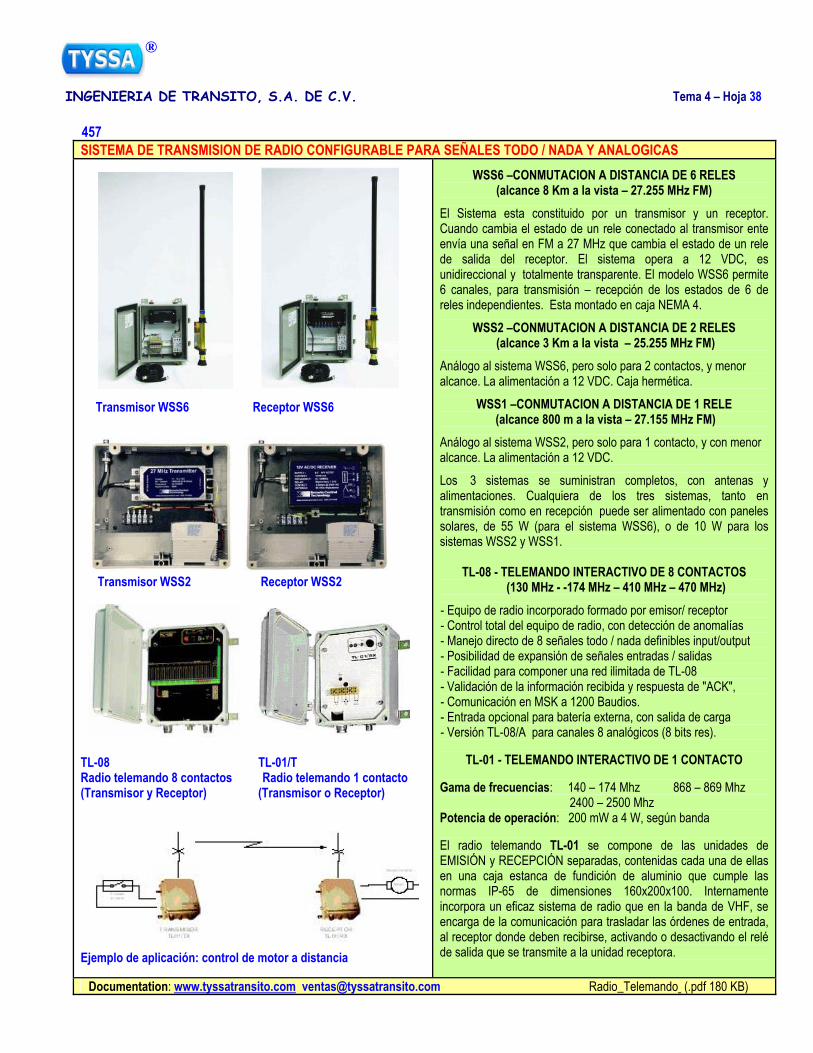
® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 38 457
SISTEMA DE TRANSMISION DE RADIO CONFIGURABLE PARA SEÑALES TODO / NADA Y ANALOGICAS
Transmisor WSS6 Receptor WSS6
Transmisor WSS2 Receptor WSS2
TL-08 TL-01/T Radio telemando 8 contactos Radio telemando 1 contacto (Transmisor y Receptor) (Transmisor o Receptor)
Ejemplo de aplicación: control de motor a distancia
WSS6 –CONMUTACION A DISTANCIA DE 6 RELES (alcance 8 Km a la vista – 27.255 MHz FM)
El Sistema esta constituido por un transmisor y un receptor. Cuando cambia el estado de un rele conectado al transmisor ente envía una señal en FM a 27 MHz que cambia el estado de un rele de salida del receptor. El sistema opera a 12 VDC, es unidireccional y totalmente transparente. El modelo WSS6 permite 6 canales, para transmisión – recepción de los estados de 6 de reles independientes. Esta montado en caja NEMA 4.
WSS2 –CONMUTACION A DISTANCIA DE 2 RELES (alcance 3 Km a la vista – 25.255 MHz FM)
Análogo al sistema WSS6, pero solo para 2 contactos, y menor alcance. La alimentación a 12 VDC. Caja hermética.
WSS1 –CONMUTACION A DISTANCIA DE 1 RELE (alcance 800 m a la vista – 27.155 MHz FM)
Análogo al sistema WSS2, pero solo para 1 contacto, y con menor alcance. La alimentación a 12 VDC.
Los 3 sistemas se suministran completos, con antenas y alimentaciones. Cualquiera de los tres sistemas, tanto en transmisión como en recepción puede ser alimentado con paneles solares, de 55 W (para el sistema WSS6), o de 10 W para los sistemas WSS2 y WSS1.
TL-08 - TELEMANDO INTERACTIVO DE 8 CONTACTOS (130 MHz - -174 MHz – 410 MHz – 470 MHz)
- Equipo de radio incorporado formado por emisor/ receptor - Control total del equipo de radio, con detección de anomalías - Manejo directo de 8 señales todo / nada definibles input/output - Posibilidad de expansión de señales entradas / salidas - Facilidad para componer una red ilimitada de TL-08 - Validación de la información recibida y respuesta de "ACK", - Comunicación en MSK a 1200 Baudios. - Entrada opcional para batería externa, con salida de carga - Versión TL-08/A para canales 8 analógicos (8 bits res).
TL-01 - TELEMANDO INTERACTIVO DE 1 CONTACTO Gama de frecuencias: 140 – 174 Mhz 868 – 869 Mhz
2400 – 2500 Mhz Potencia de operación: 200 mW a 4 W, según banda El radio telemando TL-01 se compone de las unidades de EMISIÓN y RECEPCIÓN separadas, contenidas cada una de ellas en una caja estanca de fundición de aluminio que cumple las normas IP-65 de dimensiones 160x200x100. Internamente incorpora un eficaz sistema de radio que en la banda de VHF, se encarga de la comunicación para trasladar las órdenes de entrada, al receptor donde deben recibirse, activando o desactivando el relé de salida que se transmite a la unidad receptora.
Documentation: www.tyssatransito.com [email protected] Radio_Telemando (.pdf 180 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 39 458
SISTEMA DE TRANSMISION PARA SEÑALES DE VIDEO / AUDIO HASTA 4 KM.
Radioenlace Video/Audio modelo TCRA-24
Instalación típica PUNTO -PUNTO
Instalación típica PUNTO –MULTIPUNTO
“Hub” VH-200 de 4 entradas para conversión a TCP/IP
TRCA-24 - RADIOENLACE VÍDEO Y AUDIO
(hasta 4 km, punto – punto 2,400 – 2,800 MHz) El sistema TRCA-24 a prueba de factores climáticos es la solución perfecta para la transmisión de vídeo y audio punto-punto de forma sencilla a distancias de hasta 4 Km. Tanto el transmisor (TRA-24) como el receptor (RCA-24) están integrados en la antena, de esta forma la pérdida de señal es inexistente, y se simplifica al máximo la instalación ya que los cables y conectores coaxiales desaparecen, y constituyen un sistema combinado compuesto por una antena de 13 dB de ganancia, radomizada (va cubierta y protegida totalmente por un tubo de PVC) e integra en su parte posterior un transmisor o receptor del tipo UTM-24, o URM-24 el cual, mediante incorporación de la tarjeta TFD-1, permite realizar el control de activado / desactivado y el cambio de frecuencias por control remoto.
- Fácil instalación, sin conectores ni cables coaxiales - Antenas radomizadas para ambientes agresivos. - Transmisor y receptor integrados - Supera en un 60% de rendimiento a los sistemas convencionales - 6 Canales simultáneos seleccionables
TRCA-24/TFD - RADIOENLACE VÍDEO Y AUDIO (hasta 4 km, punto – multipunto 2,400 – 2,800 MHz)
El sistema TRCA-24/TFD a prueba de factores climáticos es la solución perfecta para la transmisión de vídeo y audio punto-multipunto de forma sencilla. Tanto el transmisor (TRA-24) como el receptor (RCA-24) están integrados en la antena, de esta forma la pérdida de señal es inexistente, y simplifica al máximo la instalación ya que los cables y conectores coaxiales desaparecen. Gracias al sistema TFD (Teleasignación frecuencia dinámica), es posible configurar sistemas con un número ilimitado de cámaras.
CONVERSION DE VIDEO CONVENCIONAL A DIGITAL
El Video Hub VH-2100 de Iteris es un transceptor que recibe 4 señales de video color o B/N de cualquier sistema CCTV y las transforma a protocolo TCP/IP. (TCP son las siglas de "Transmisión Control Protocol", mientras que IP significa "Internetwork Protocol"). Independientemente de su significado concreto, TCP/IP ha venido a ser casi sinónimo de Internet.
El equipo VH-200 actúa realmente como un servidor de propósito especial. A través de un conector RJ-45 permite colocar en una red local (LAN) o en una red amplia (WAN) o en red Internet hasta 4 señales de video convencional, que serán accesibles desde cualquier computador cuando se accese a ellas a través de la dirección correspondiente (IP) que tenga asignada cada señal de video en el Hub.
Características técnicas
Compatible 10Base T Ethernet o 100Base TX Fast Ethernet TCP/IP. Compatible NTSC o PAL (autodetectados) Sistemas operativos: Windows 2000, NT, XP,
Documentación: www.tyssa.ws [email protected] Radio_Video (.pdf 157 KB)

® INGENIERIA DE TRANSITO, S.A. DE C.V. Tema 4 – Hoja 40
Medida de dimensiones de vehículos
Clasificación por número de ejes
Detector láser para doble carril
Detector a triple tecnología (IR-MW-U)
Radar a efecto Doppler
Cámara para captura de placas
SISTEMAS ELEVADOS PARA DETECCION Y CONTROL DE LA CIRCULACION DE AUTOMOVILES Y CAMIONES - detectores a láser infrarrojo - detectores a infrarrojo pasivo - detectores a ultrasonidos - detectores a micro-ondas - radares a efecto doppler - reconocimiento de placa - detección vehicular IR
INGETRA INGENIERIA DE TRANSITO, S.A. DE C.V. Heriberto Frías 930, Col. del Valle, Del. Benito Juárez 03100 México, D.F., México. Tel: +52 1107 7060 / +52 5669 1724 Tel/Fax: +52 1107 7176 Web: www.tyssatransito.com e-mail: [email protected]