pariz-karimpour feb 2011 1 chapter 3 reference: switched linear systems control and design zhendong...
Post on 21-Dec-2015
213 views
TRANSCRIPT

Pariz-Karimpour Feb 2011
1
Chapter 3
Reference: Switched linear systems control and design
Zhendong Sun, Shuzhi S. Ge
Pariz-Karimpour Feb 2011
2
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
3.6. Numerical Examples 3.6. Numerical Examples
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous Systems

Pariz-Karimpour Feb 2011
3
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
3.6. Numerical Examples 3.6. Numerical Examples
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous Systems
Pariz-Karimpour Feb 2011
4

Pariz-Karimpour Feb 2011
5
IntroductionIntroduction
Pariz-Karimpour Feb 2011
6
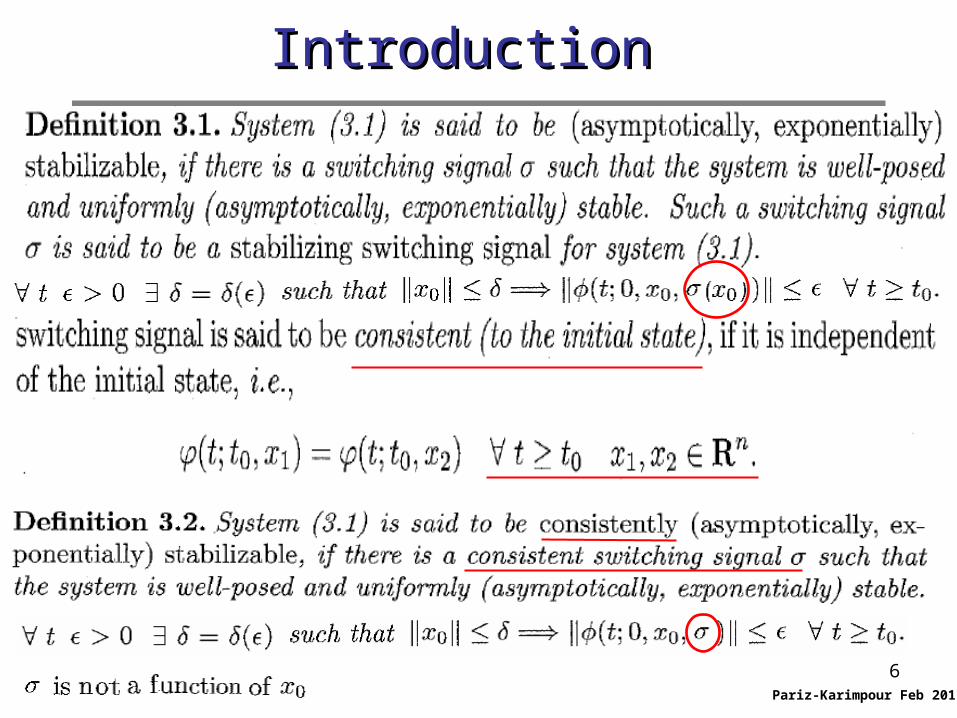
IntroductionIntroduction

Pariz-Karimpour Feb 2011
7
?
IntroductionIntroduction
Pariz-Karimpour Feb 2011
8
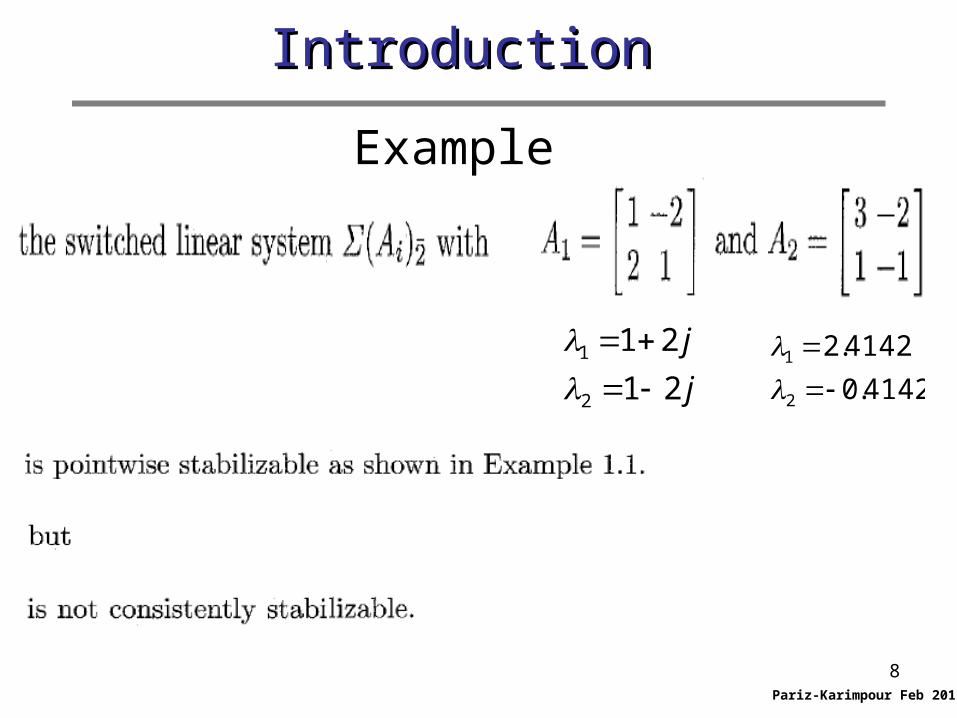
j
j
21
21
2
1
4142.0
4142.2
2
1
IntroductionIntroduction
Example
Pariz-Karimpour Feb 2011
9
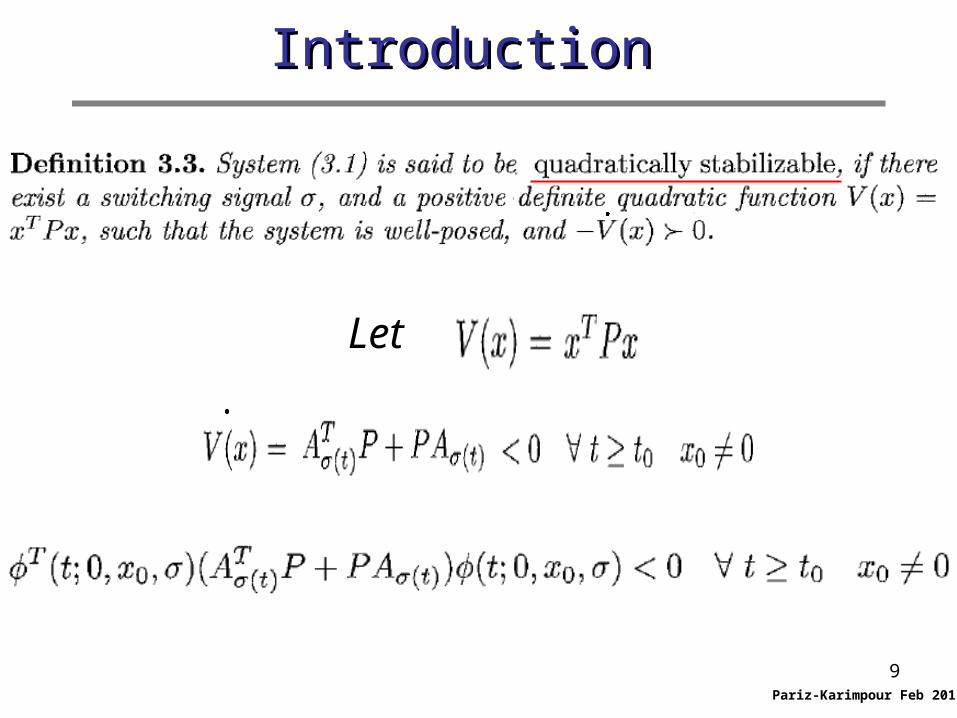
Let
IntroductionIntroduction

Pariz-Karimpour Feb 2011
10
IntroductionIntroduction

Pariz-Karimpour Feb 2011
11
This lecture provide:
• Basic observation on the ability and limitation of switching design
• Analyze and design of some switching for Stability and robustness
IntroductionIntroduction

Pariz-Karimpour Feb 2011
12
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
3.6. Numerical Examples 3.6. Numerical Examples
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous Systems

Pariz-Karimpour Feb 2011
13
Pariz-Karimpour Feb 2011
14
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria
3.2.2. Equivalence of the Stabilization Notions3.2.2. Equivalence of the Stabilization Notions
3.2.3. Periodic and Synchronous Switchings3.2.3. Periodic and Synchronous Switchings
3.2.4. Special Systems3.2.4. Special Systems
3.2.5. Robustness Issues3.2.5. Robustness Issues
General ResultsGeneral Results
Pariz-Karimpour Feb 2011
15
Algebraic CriteriaAlgebraic Criteria
Pariz-Karimpour Feb 2011
16
Algebraic CriteriaAlgebraic Criteria
Pariz-Karimpour Feb 2011
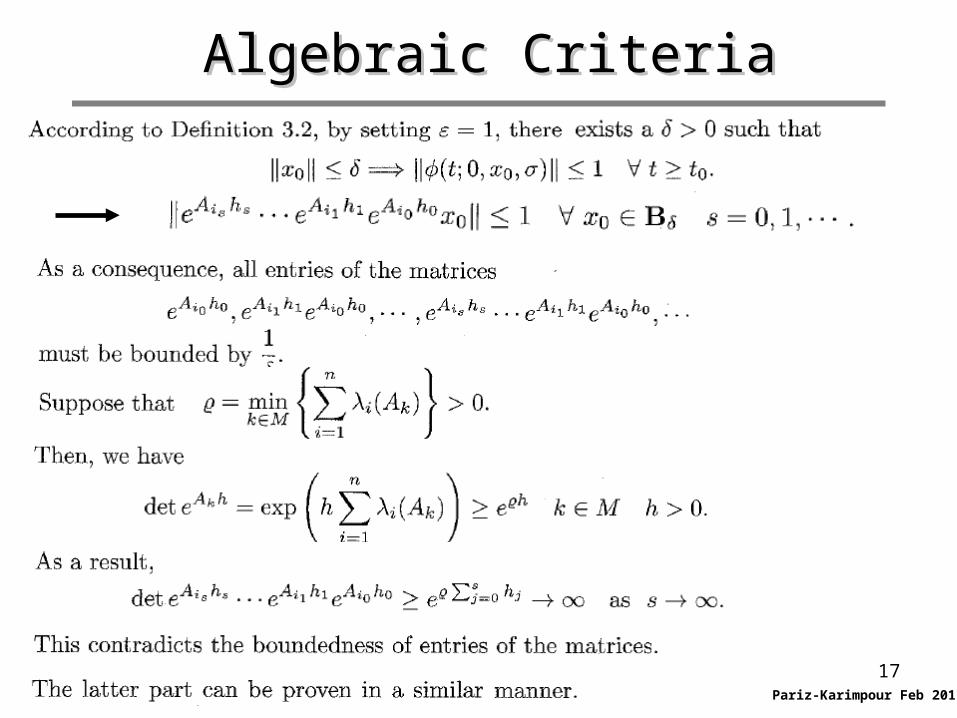
17
Algebraic CriteriaAlgebraic Criteria
Pariz-Karimpour Feb 2011
18
j
j
21
21
2
1
4142.0
4142.2
2
1
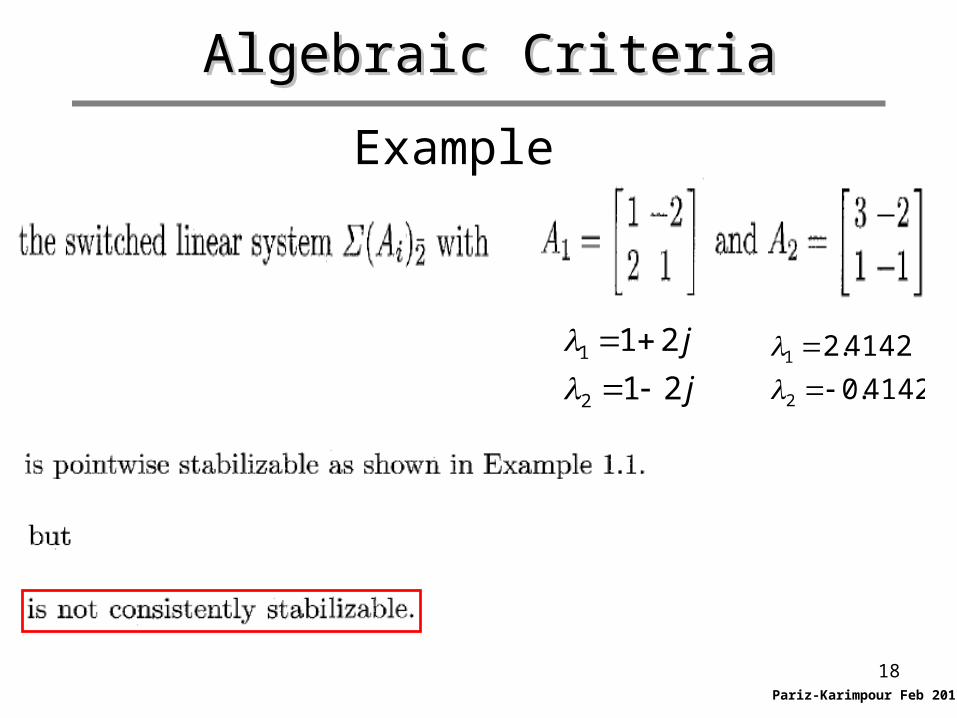
Example
Algebraic CriteriaAlgebraic Criteria

Pariz-Karimpour Feb 2011
19
Algebraic CriteriaAlgebraic Criteria
Pariz-Karimpour Feb 2011
20
j
j
21
21
2
1
4142.0
4142.2
2
1
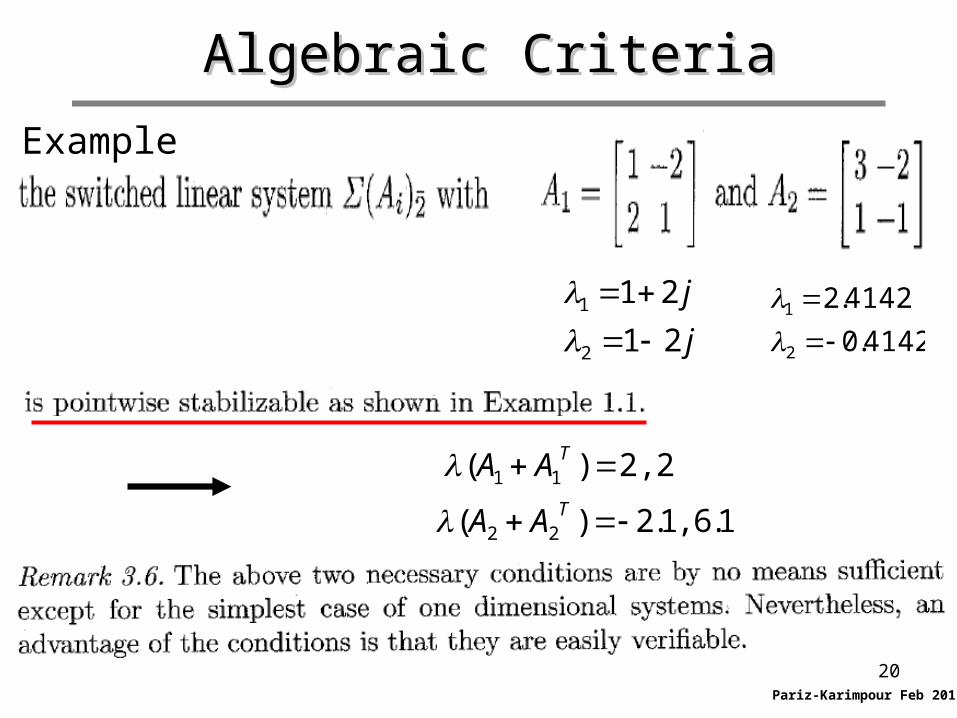
Example
Algebraic CriteriaAlgebraic Criteria
2,2)( 11 TAA
1.6,1.2)( 22 TAA
Pariz-Karimpour Feb 2011
21
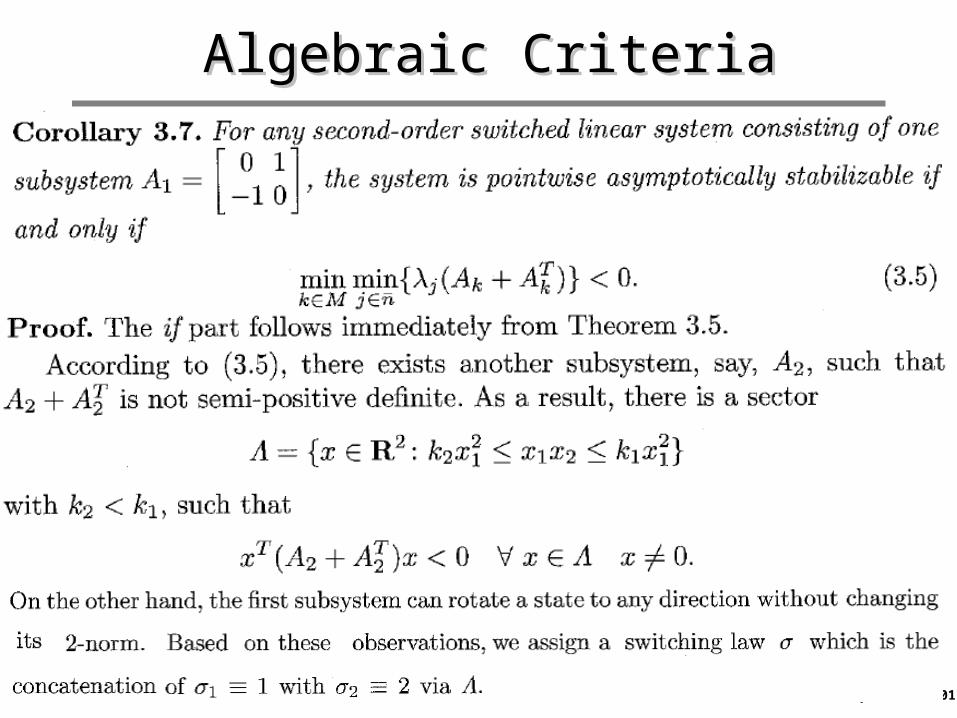
Algebraic CriteriaAlgebraic Criteria

Pariz-Karimpour Feb 2011
22
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria
3.2.2. Equivalence of the Stabilization Notions3.2.2. Equivalence of the Stabilization Notions
3.2.3. Periodic and Synchronous Switchings3.2.3. Periodic and Synchronous Switchings
3.2.4. Special Systems3.2.4. Special Systems
3.2.5. Robustness Issues3.2.5. Robustness Issues
General ResultsGeneral Results

Pariz-Karimpour Feb 2011
23
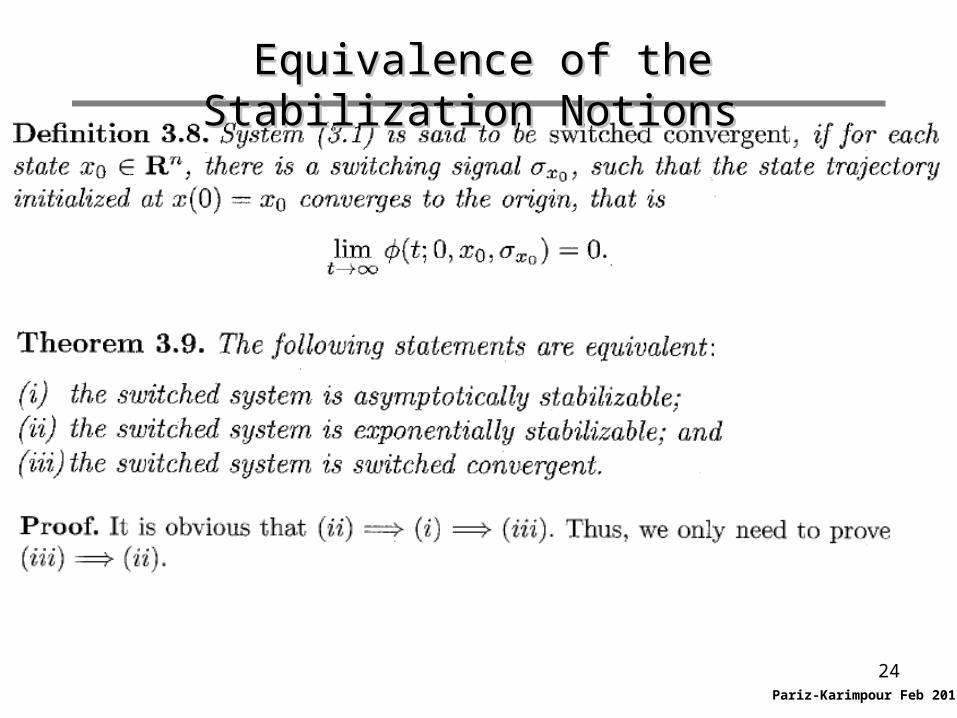
Does this equivalence still hold for switched linear systems
To establish the equivalence, we need the concept of switched convergence
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions
Pariz-Karimpour Feb 2011
24
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions

Pariz-Karimpour Feb 2011
25
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions
Pariz-Karimpour Feb 2011
26
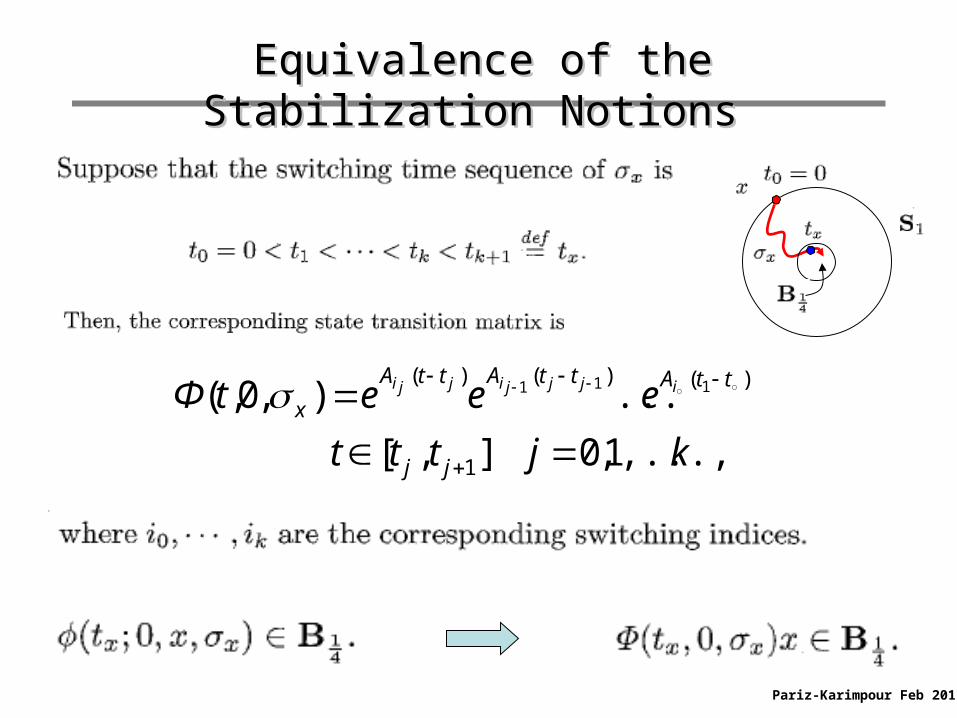
kjttt
eeetΦ
jj
ttAttAttA
xijjjijji
,...,1,0],[
...),0,(
1
)()()(111
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions

Pariz-Karimpour Feb 2011
27
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions

Pariz-Karimpour Feb 2011
28
R2. . .
Rl
. . .
. . .
R1
Ri
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions

Pariz-Karimpour Feb 2011
29
R2. . .
Rl
. . .. .
.
R1
Ri
TttttttttttAttAttA
ttAttAttAttAttAttA
x
eeeeeeee
eeeeeetΦ
jjjijjjijji
ijjjijjiijjjijji
)()()()()()()(
)()()()()()(
11111
111111
......
.......),0,(
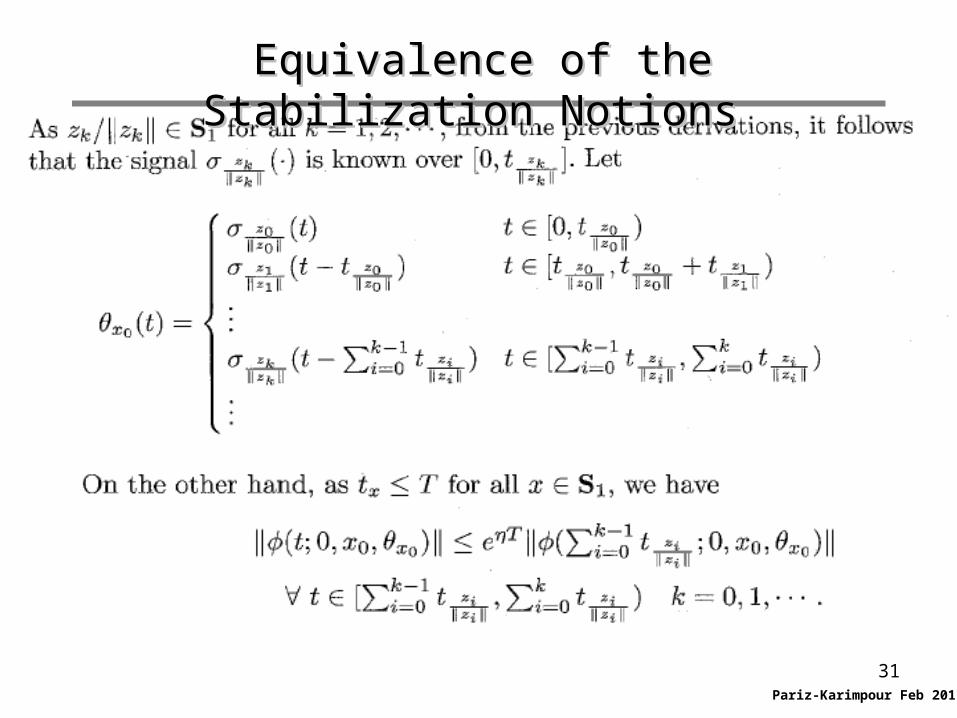
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions
SinceSince

Pariz-Karimpour Feb 2011
30
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions
Pariz-Karimpour Feb 2011
31
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions
Pariz-Karimpour Feb 2011
32
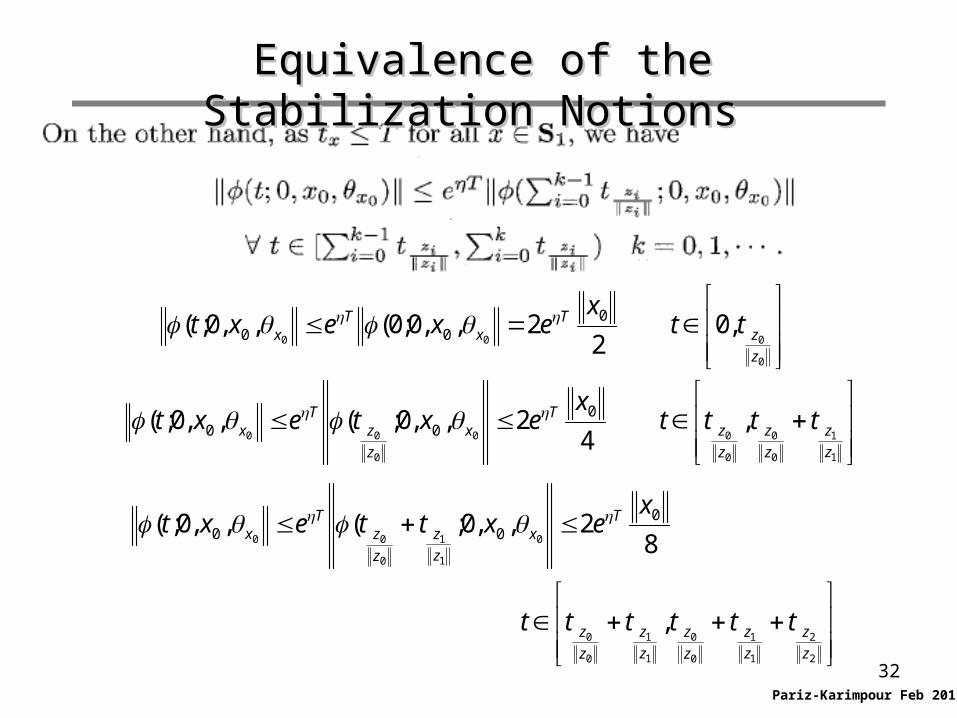
0
000,0
22,,0;0(,,0;( 0
00
z
zT
xT
x ttx
exext
1
1
0
0
0
00
0
00,
42,,0;(,,0;( 0
00
z
z
z
z
z
zT
x
z
zT
x ttttx
extext
2
2
1
1
0
0
1
1
0
0
0
1
1
0
00
,
82,,0;(,,0;( 0
00
z
z
z
z
z
z
z
z
z
z
Tx
z
z
z
zT
x
tttttt
xexttext
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions

Pariz-Karimpour Feb 2011
33
02 xe T
4
)(txtt
TT exexe 0
2ln
02
Equivalence of the Stabilization NotionsEquivalence of the Stabilization Notions
22 0xe T
2
42 0xe T
3
82 0xe T

Pariz-Karimpour Feb 2011
34
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria
3.2.2. Equivalence of the Stabilization Notions3.2.2. Equivalence of the Stabilization Notions
3.2.3. Periodic and Synchronous Switchings3.2.3. Periodic and Synchronous Switchings
3.2.4. Special Systems3.2.4. Special Systems
3.2.5. Robustness Issues3.2.5. Robustness Issues
General ResultsGeneral Results
Pariz-Karimpour Feb 2011
35
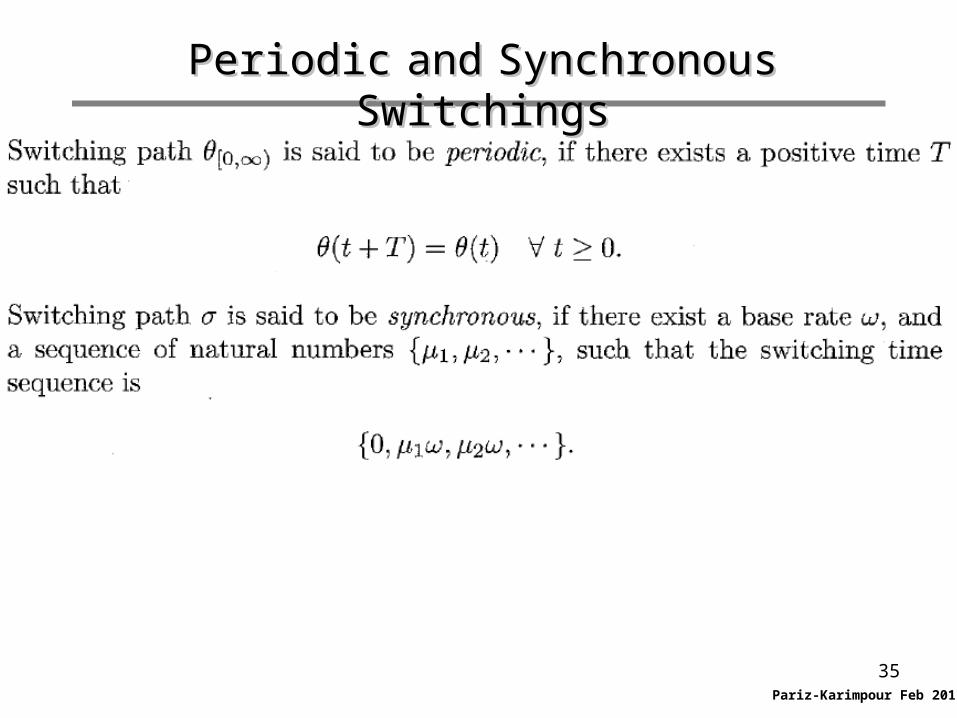
PeriodicPeriodic andand SynchronousSynchronous SwitchingsSwitchings

Pariz-Karimpour Feb 2011
36
PeriodicPeriodic andand SynchronousSynchronous SwitchingsSwitchings
Pariz-Karimpour Feb 2011
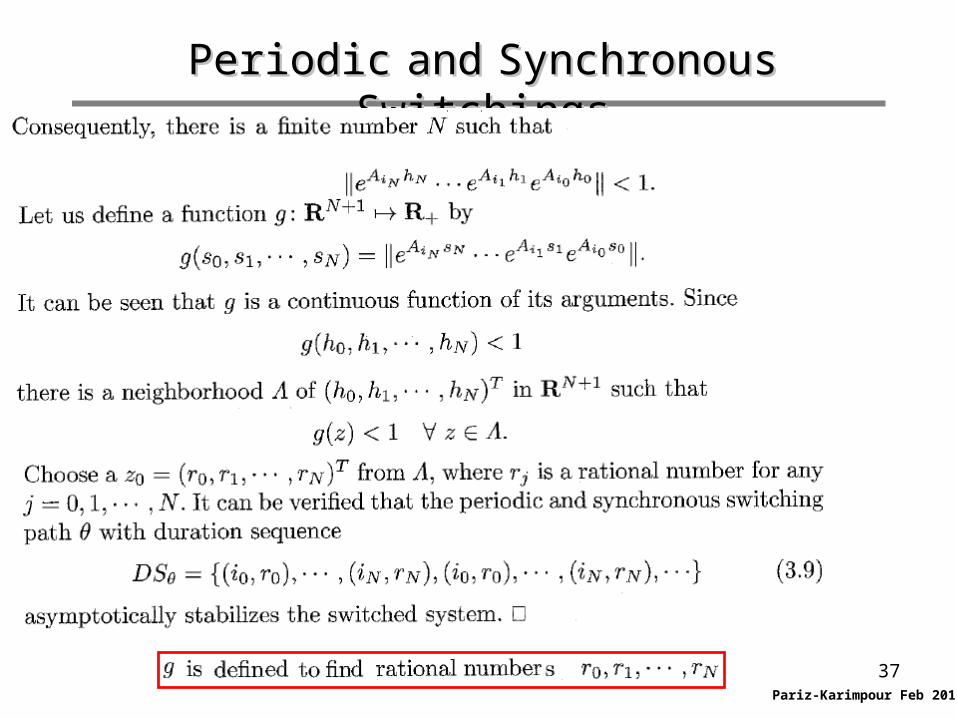
37
PeriodicPeriodic andand SynchronousSynchronous SwitchingsSwitchings

Pariz-Karimpour Feb 2011
38
PeriodicPeriodic andand SynchronousSynchronous SwitchingsSwitchings

Pariz-Karimpour Feb 2011
39
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria
3.2.2. Equivalence of the Stabilization Notions3.2.2. Equivalence of the Stabilization Notions
3.2.3. Periodic and Synchronous Switchings3.2.3. Periodic and Synchronous Switchings
3.2.4. Special Systems3.2.4. Special Systems
3.2.5. Robustness Issues3.2.5. Robustness Issues
General ResultsGeneral Results

Pariz-Karimpour Feb 2011
40
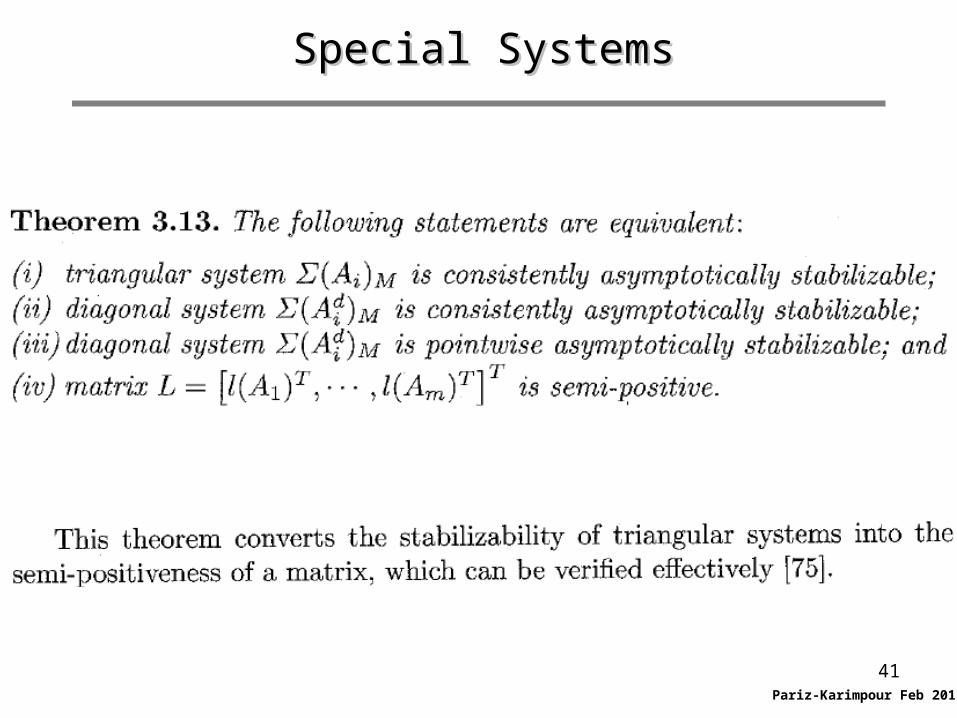
Special SystemsSpecial Systems
Pariz-Karimpour Feb 2011
41
Special SystemsSpecial Systems

Pariz-Karimpour Feb 2011
42
Special SystemsSpecial Systems

Pariz-Karimpour Feb 2011
43
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria
3.2.2. Equivalence of the Stabilization Notions3.2.2. Equivalence of the Stabilization Notions
3.2.3. Periodic and Synchronous Switchings3.2.3. Periodic and Synchronous Switchings
3.2.4. Special Systems3.2.4. Special Systems
3.2.5. Robustness Issues3.2.5. Robustness Issues
General ResultsGeneral Results
Pariz-Karimpour Feb 2011
44
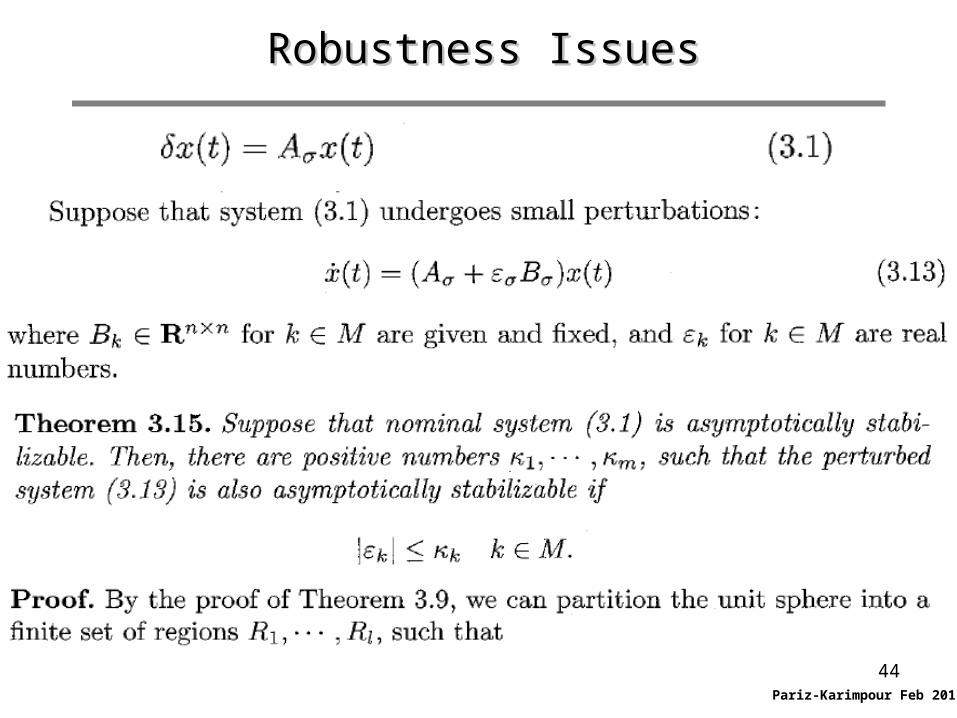
Robustness IssuesRobustness Issues
Pariz-Karimpour Feb 2011
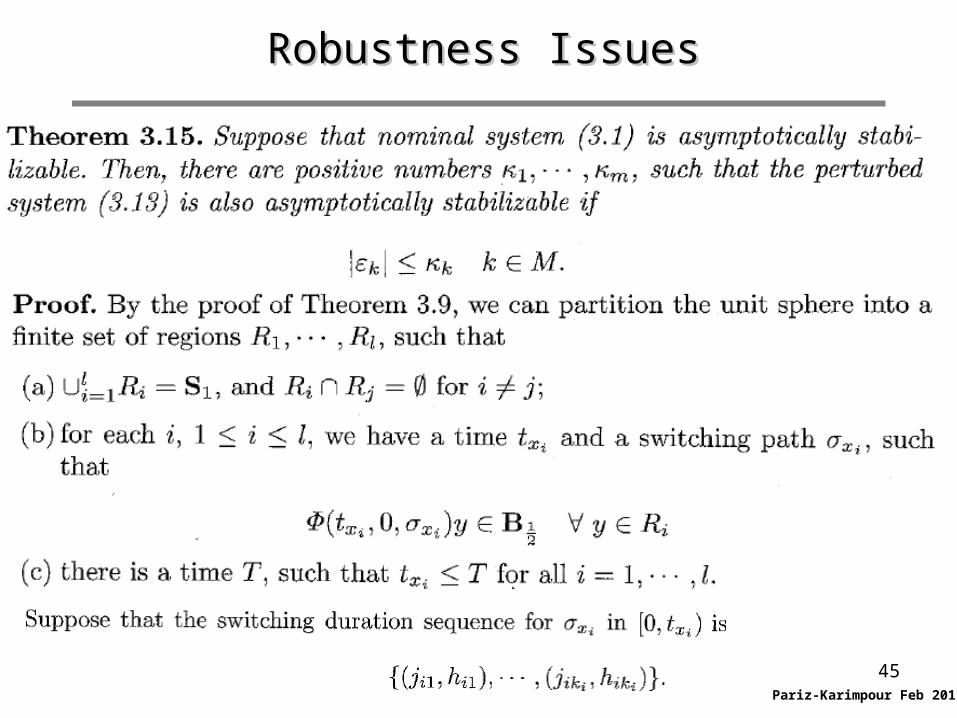
45
Robustness IssuesRobustness Issues

Pariz-Karimpour Feb 2011
46
Robustness IssuesRobustness Issues
Proof of theorem 3.15 (continue)
Pariz-Karimpour Feb 2011
47
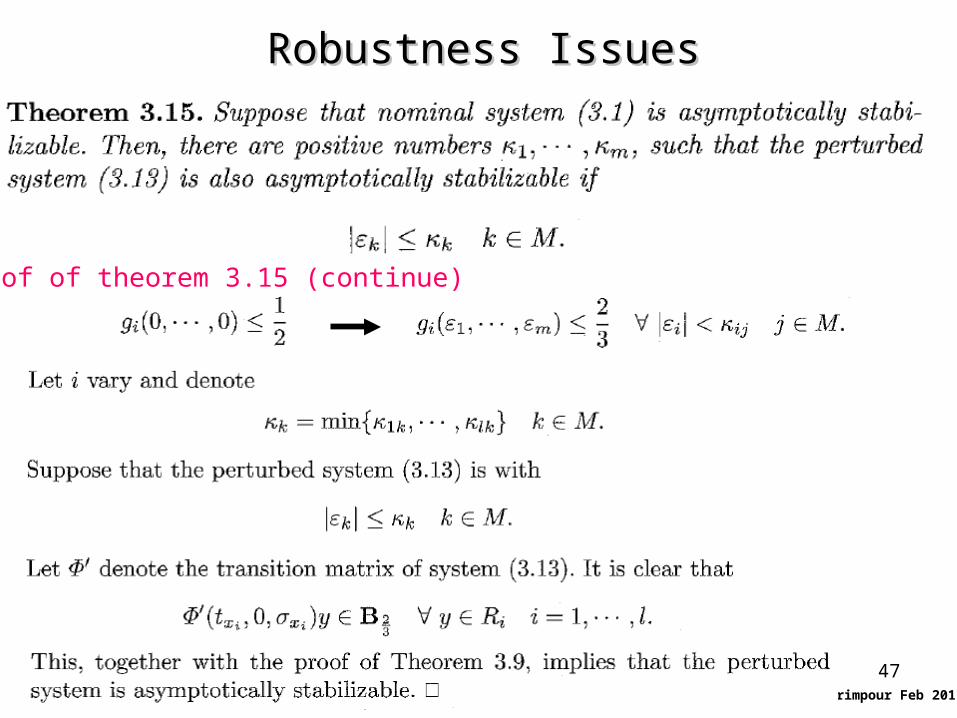
Robustness IssuesRobustness Issues
Proof of theorem 3.15 (continue)
Pariz-Karimpour Feb 2011
48
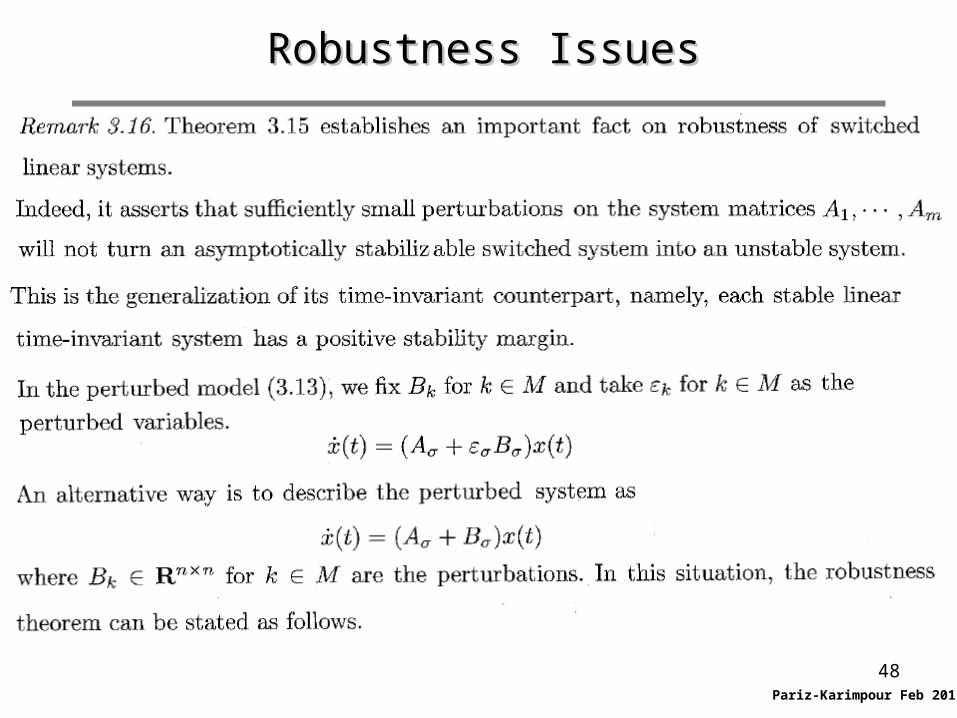
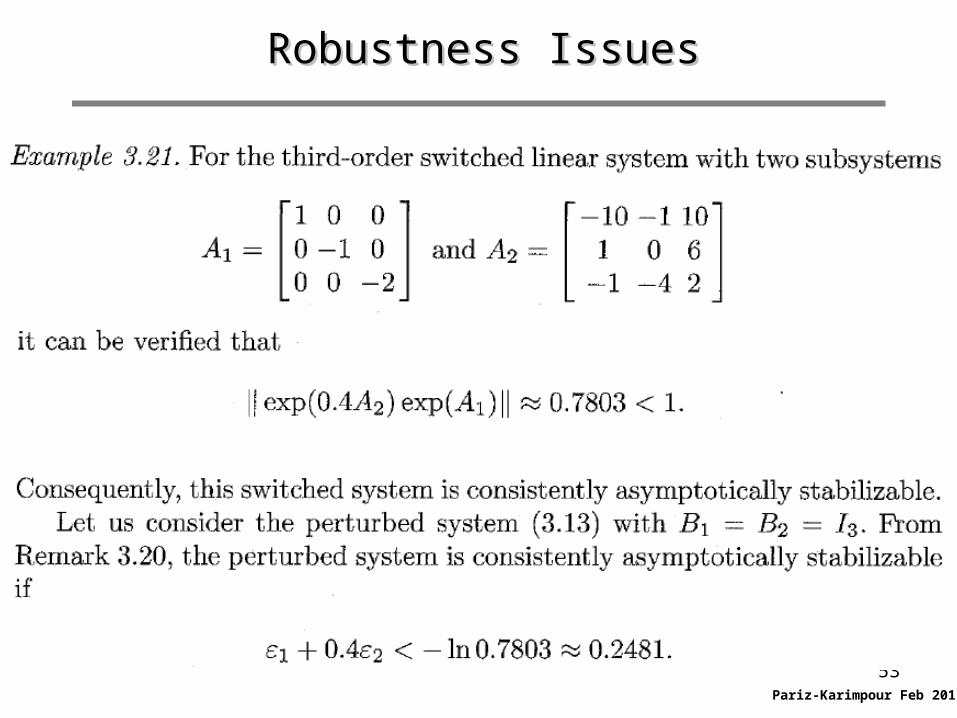
Robustness IssuesRobustness Issues

Pariz-Karimpour Feb 2011
49
Robustness IssuesRobustness Issues

Pariz-Karimpour Feb 2011
50
Robustness IssuesRobustness Issues
Pariz-Karimpour Feb 2011
51
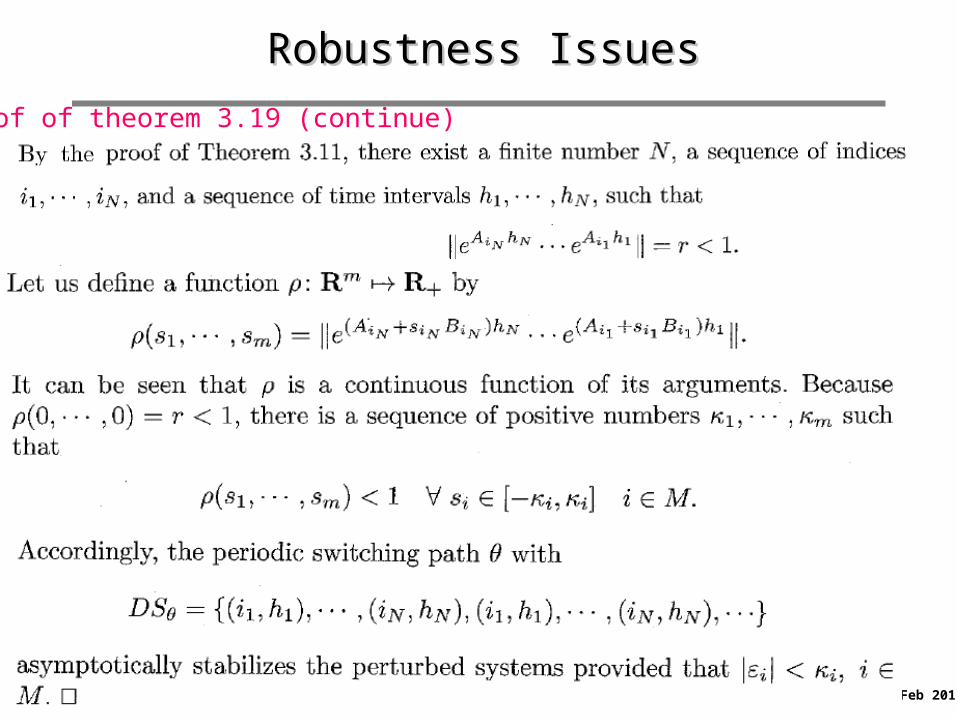
Proof of theorem 3.19 (continue)
Robustness IssuesRobustness Issues
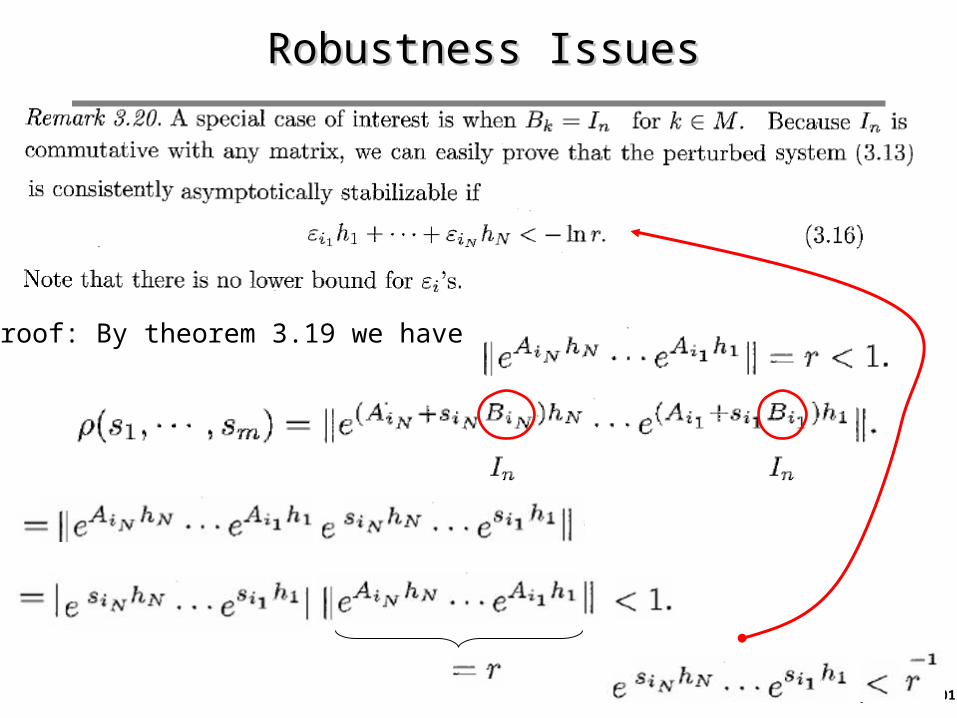
Pariz-Karimpour Feb 2011
52
Proof: By theorem 3.19 we have
Robustness IssuesRobustness Issues
Pariz-Karimpour Feb 2011
53
Robustness IssuesRobustness Issues

Pariz-Karimpour Feb 2011
54
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
3.6. Numerical Examples 3.6. Numerical Examples
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous Systems

Pariz-Karimpour Feb 2011
55

Pariz-Karimpour Feb 2011
56
Periodic SwitchingPeriodic Switching
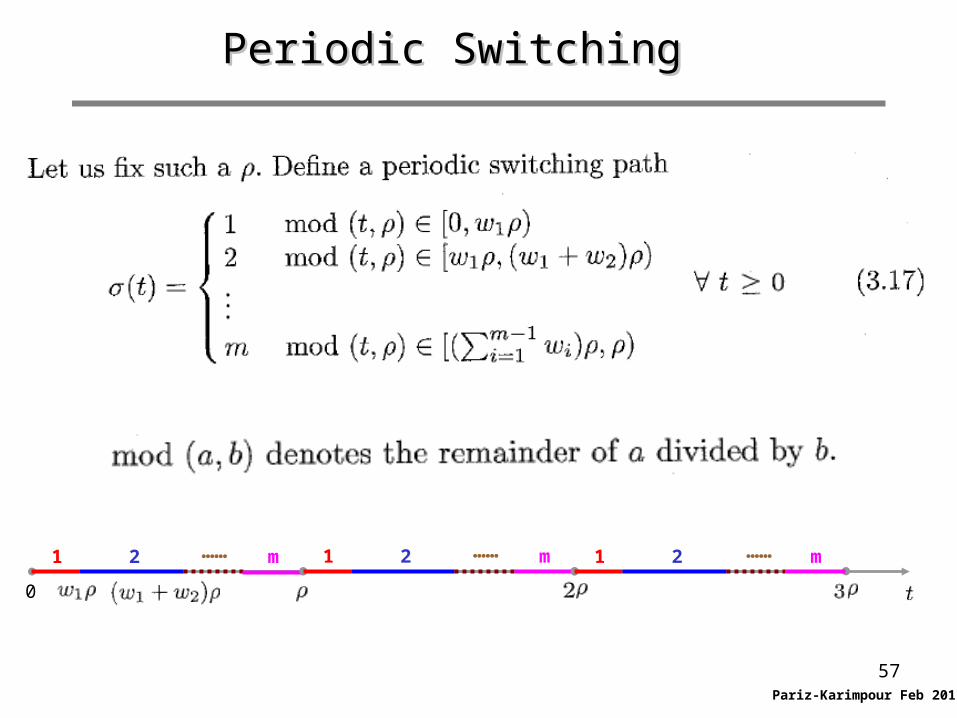
Pariz-Karimpour Feb 2011
57
0
1 2 m…… 1 2 m…… 1 2 m……
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
58
Define the fundamental matrix as:
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
59
Periodic SwitchingPeriodic Switching
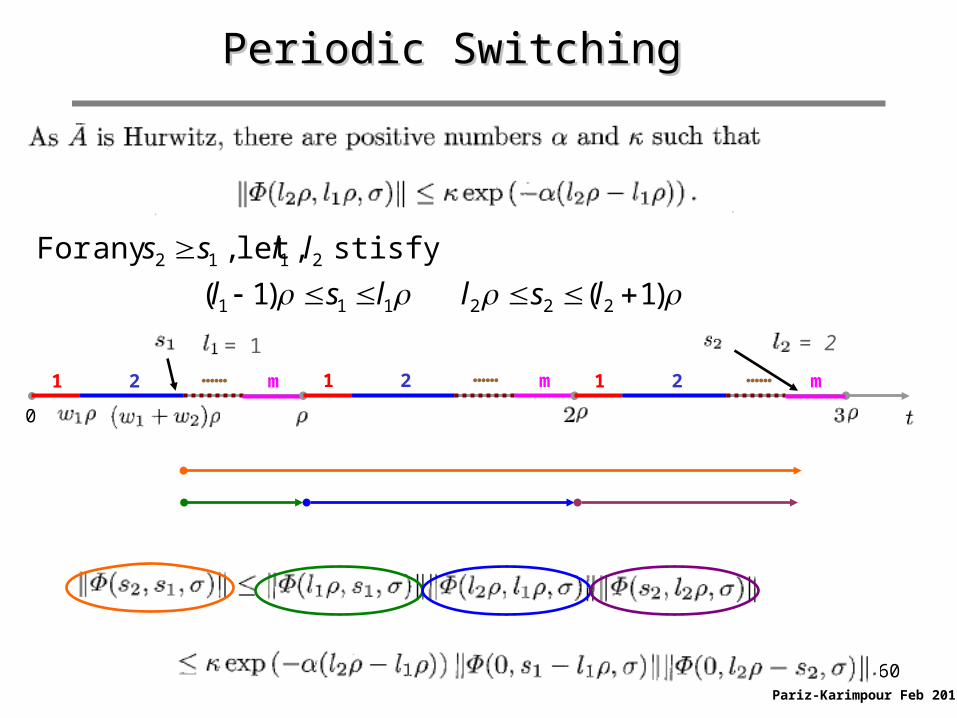
Pariz-Karimpour Feb 2011
60
0
1 2 m…… 1 2 m…… 1 2 m…… = 1 = 2
)1()1(
stisfy,let , any For
222111
2112
lsllsl
llss
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
61
0
1 2 m…… 1 2 m…… 1 2 m…… = 1 = 2
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
62
Periodic SwitchingPeriodic Switching
Pariz-Karimpour Feb 2011
63
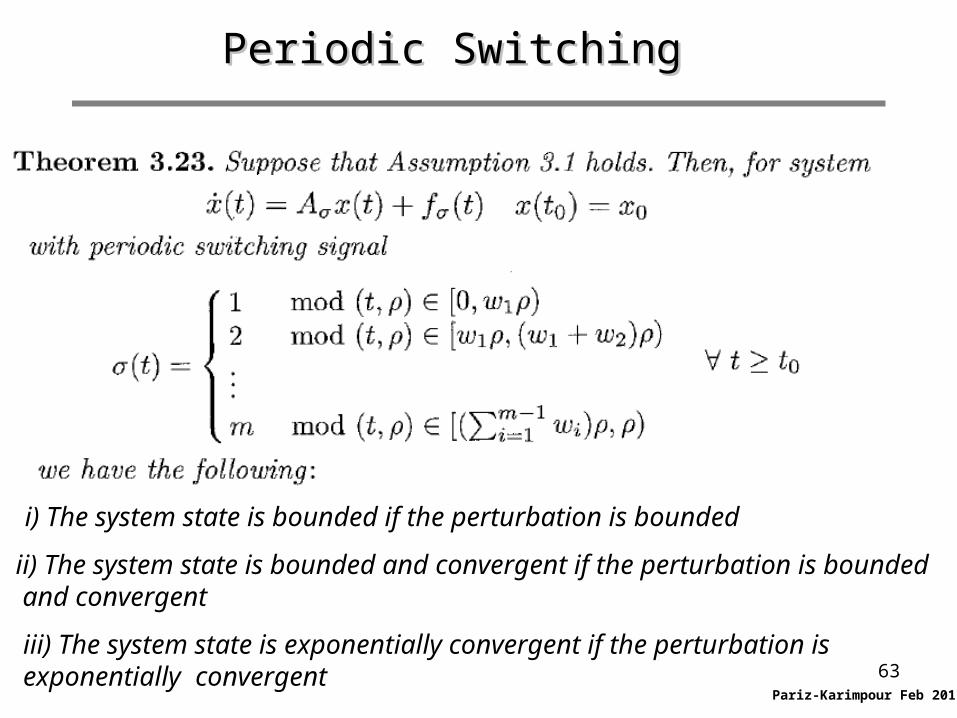
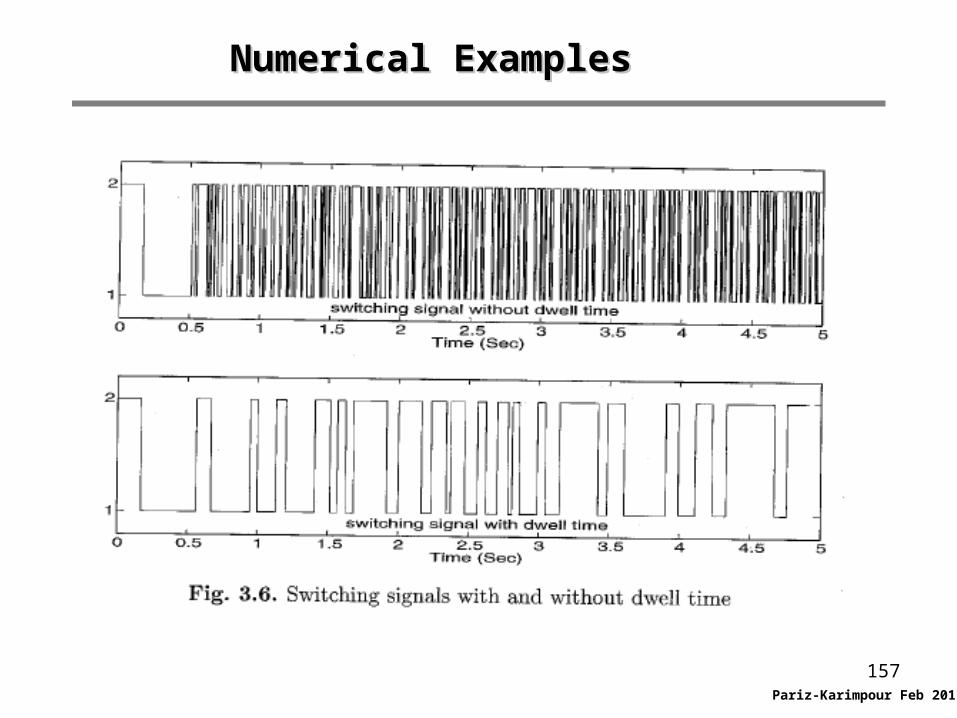
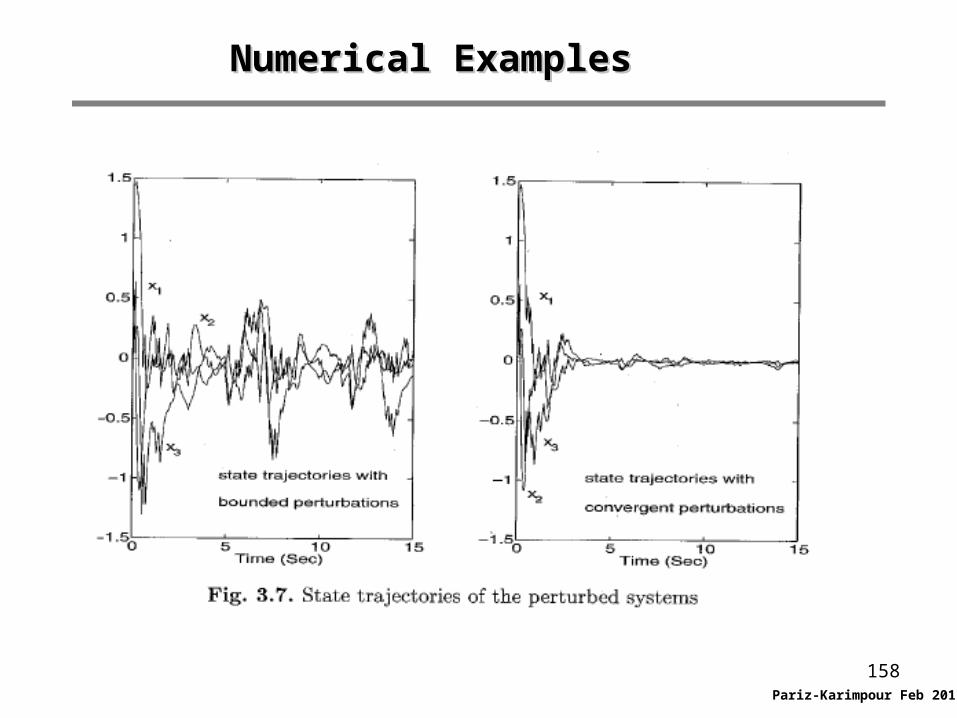
i) The system state is bounded if the perturbation is bounded
ii) The system state is bounded and convergent if the perturbation is bounded and convergent
iii) The system state is exponentially convergent if the perturbation is exponentially convergent
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
64
i)
Periodic SwitchingPeriodic Switching
Pariz-Karimpour Feb 2011
65
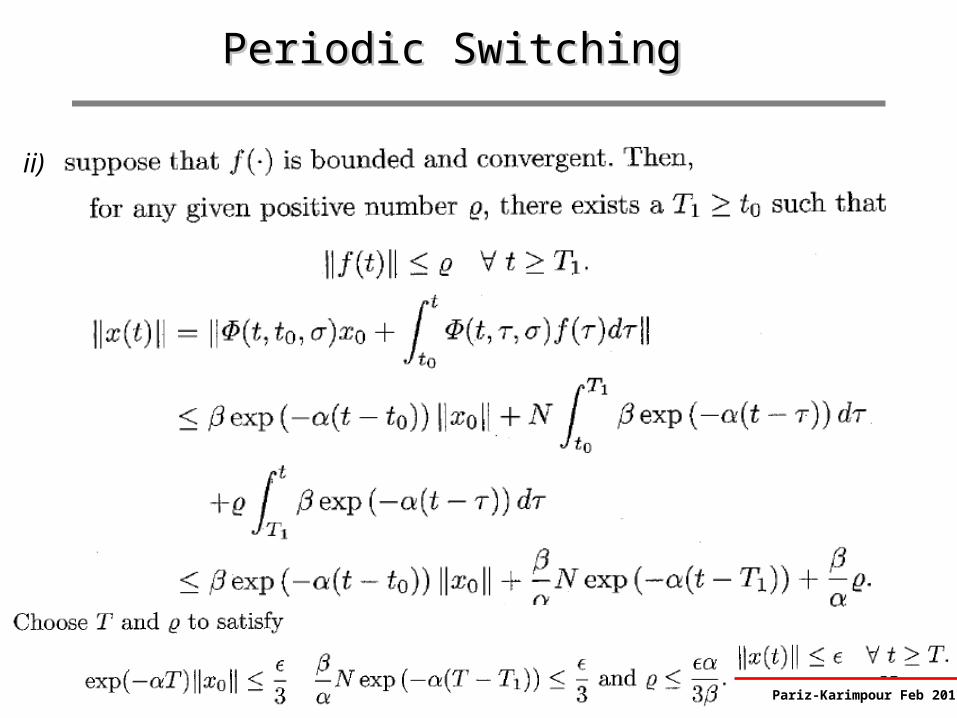
ii)
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
66
iii)
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
67
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
68
Periodic SwitchingPeriodic Switching

Pariz-Karimpour Feb 2011
69
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
3.6. Numerical Examples 3.6. Numerical Examples
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous Systems

Pariz-Karimpour Feb 2011
70

Pariz-Karimpour Feb 2011
71
3.4.1. State-space-partition-based Switching3.4.1. State-space-partition-based Switching
3.4.2. A Modified Switching Law3.4.2. A Modified Switching Law
3.4.3. Observer-based Switching3.4.3. Observer-based Switching
State-feedback SwitchingState-feedback Switching

Pariz-Karimpour Feb 2011
72
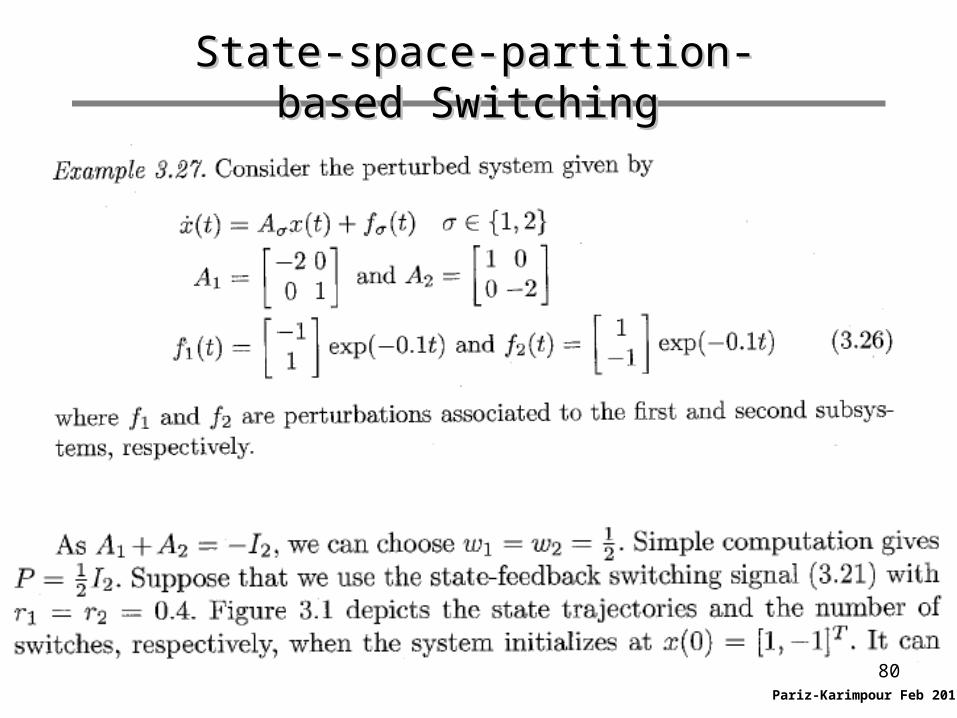
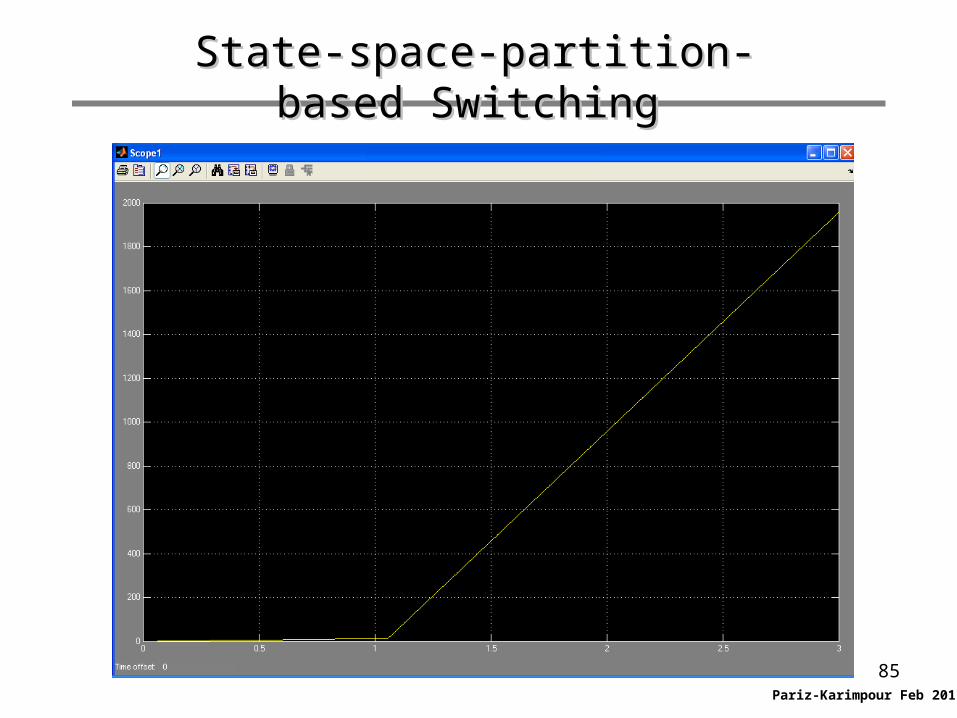
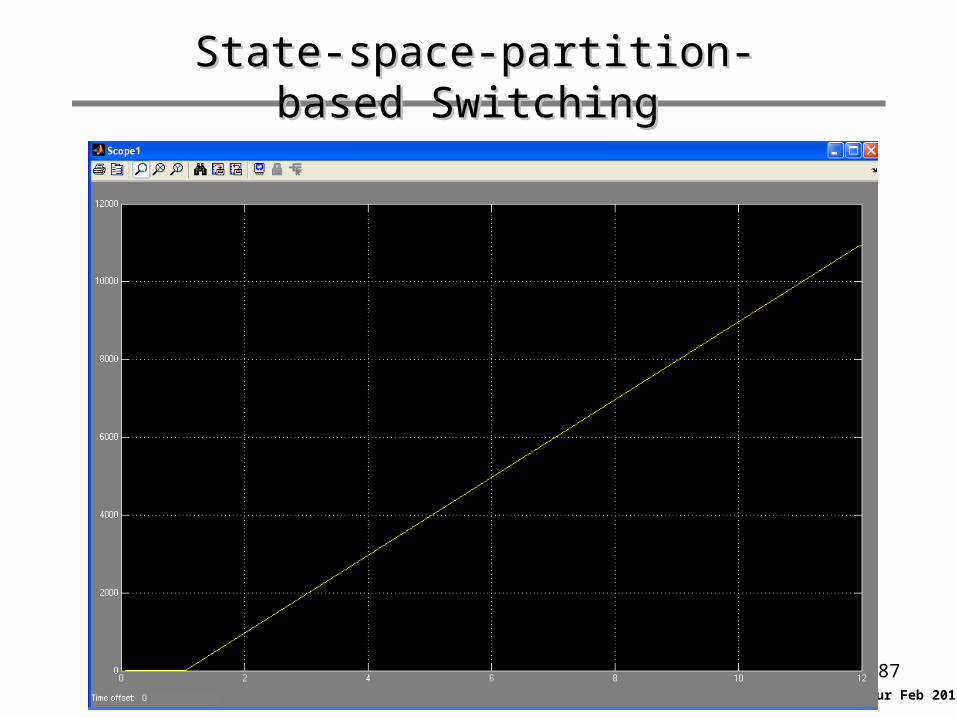
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
73
Switching strategy
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
74
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
75
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
76
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
77
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
78
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
79
State-space-partition-based SwitchingState-space-partition-based Switching
Pariz-Karimpour Feb 2011
80
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
81
State-space-partition-based SwitchingState-space-partition-based Switching
Pariz-Karimpour Feb 2011
82

Pariz-Karimpour Feb 2011
83
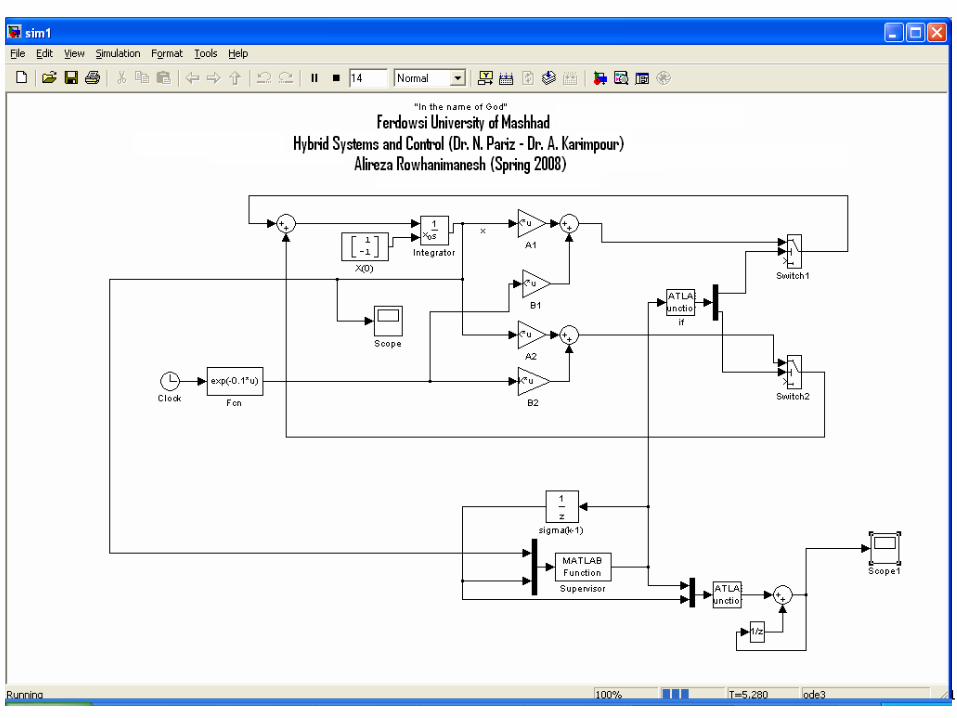
function y=myfun2(x) if x(1)~=x(2);y=1;else y=0;endend
function y=myfun1(w)if w==1; y=[1;0];endif w==2; y=[0;1];endend
function y=myfun(w)x=w(1:2);sigk=w(3);A1=[-2 0;0 1];A2=[1 0;0 -2];x0=[1;-1];P=0.5*eye(2); Q(1).s=A1'*P+P*A1;Q(2).s=A2'*P+P*A2;r(1)=0.4;r(2)=0.4;if (x'*Q(sigk).s*x) > (-r(sigk)*x'*x) [c,y]=min([x'*Q(1).s*x , x'*Q(2).s*x]); else y=sigk;endend
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
84
State-space-partition-based SwitchingState-space-partition-based Switching
Pariz-Karimpour Feb 2011
85
State-space-partition-based SwitchingState-space-partition-based Switching

Pariz-Karimpour Feb 2011
86
State-space-partition-based SwitchingState-space-partition-based Switching
Pariz-Karimpour Feb 2011
87
State-space-partition-based SwitchingState-space-partition-based Switching
Pariz-Karimpour Feb 2011
88
3.4.1. State-space-partition-based Switching3.4.1. State-space-partition-based Switching
3.4.2. A Modified Switching Law3.4.2. A Modified Switching Law
3.4.3. Observer-based Switching3.4.3. Observer-based Switching
State-feedback SwitchingState-feedback Switching

Pariz-Karimpour Feb 2011
89
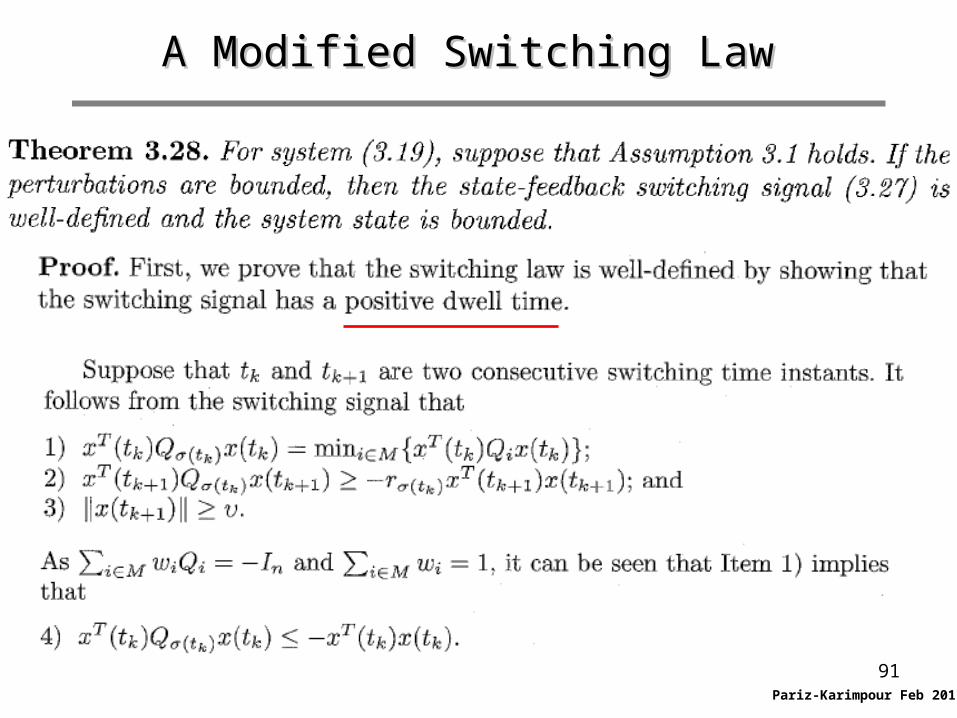
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
90
Modified Switching strategy
A Modified Switching LawA Modified Switching Law
Pariz-Karimpour Feb 2011
91
A Modified Switching LawA Modified Switching Law
Pariz-Karimpour Feb 2011
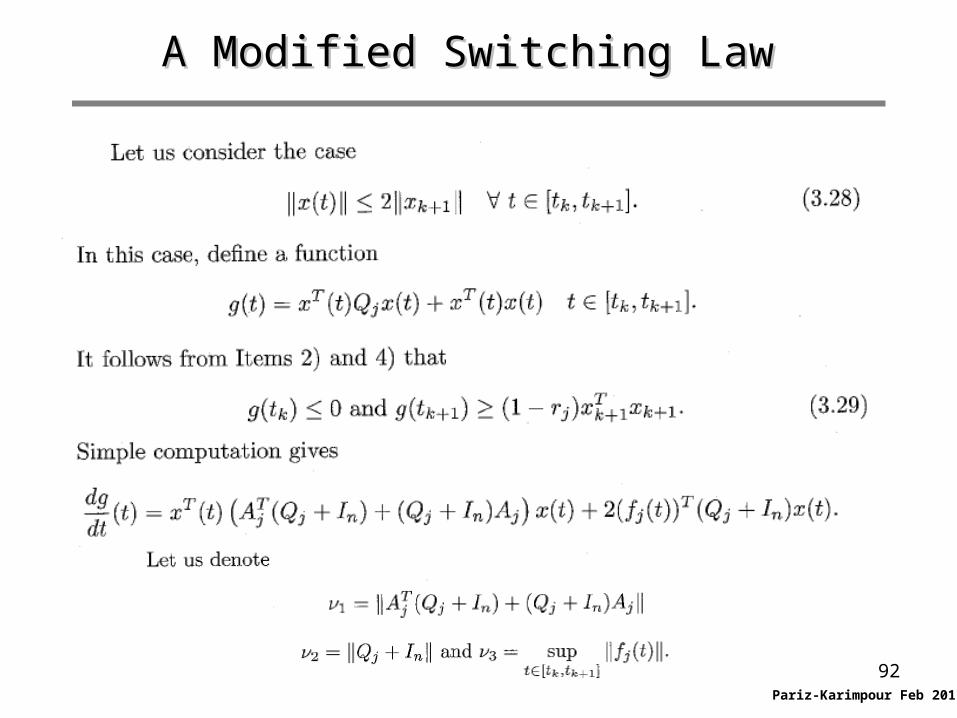
92
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
93
A Modified Switching LawA Modified Switching Law
Pariz-Karimpour Feb 2011
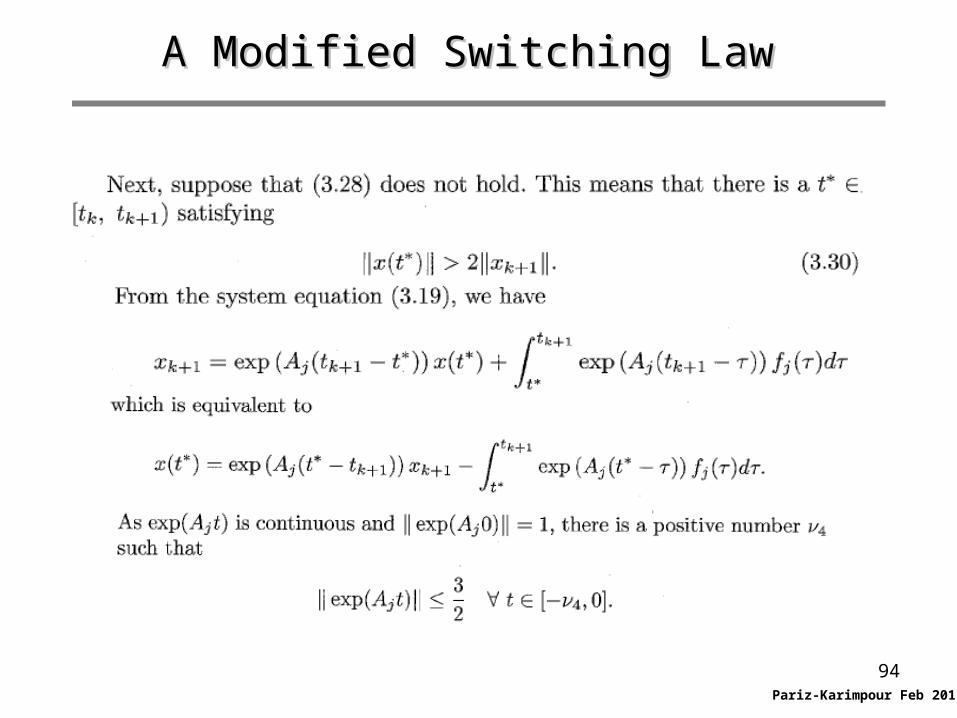
94
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
95
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
96
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
97
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
98
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
99
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
100
A Modified Switching LawA Modified Switching Law
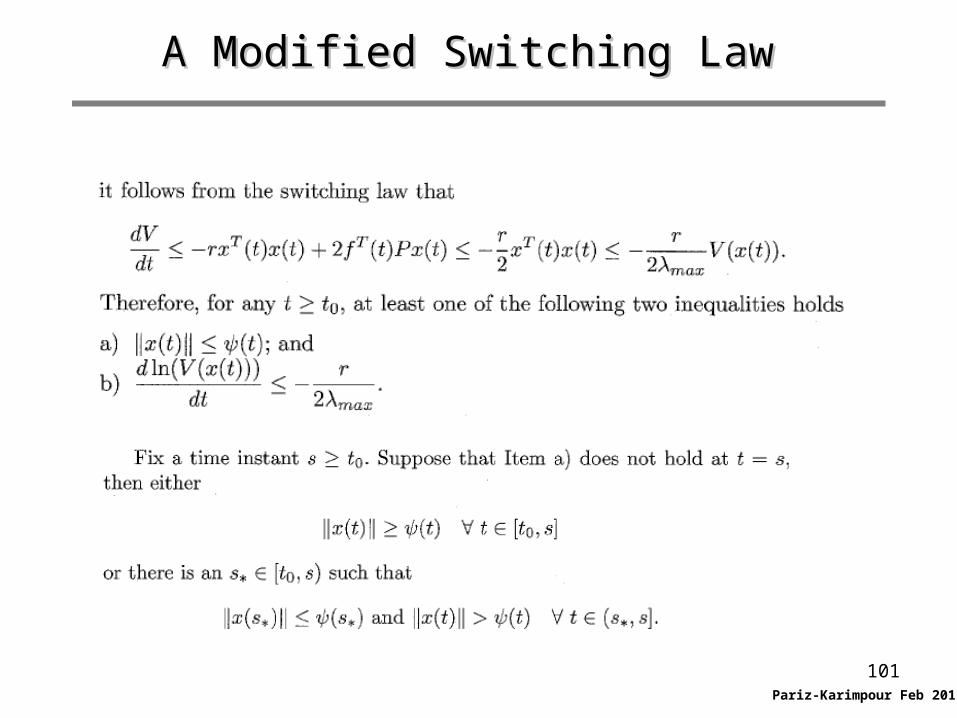
Pariz-Karimpour Feb 2011
101
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
102
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
103
A Modified Switching LawA Modified Switching Law

Pariz-Karimpour Feb 2011
104
3.4.1. State-space-partition-based Switching3.4.1. State-space-partition-based Switching
3.4.2. A Modified Switching Law3.4.2. A Modified Switching Law
3.4.3. Observer-based Switching3.4.3. Observer-based Switching
State-feedback SwitchingState-feedback Switching
Pariz-Karimpour Feb 2011
105
Observer-basedObserver-based SwitchingSwitching

Pariz-Karimpour Feb 2011
106
Observer-basedObserver-based SwitchingSwitching

Pariz-Karimpour Feb 2011
107
Observer-basedObserver-based SwitchingSwitching

Pariz-Karimpour Feb 2011
108
Observer-basedObserver-based SwitchingSwitching

Pariz-Karimpour Feb 2011
109
Observer-basedObserver-based SwitchingSwitching

Pariz-Karimpour Feb 2011
110
Pariz-Karimpour Feb 2011
111

Pariz-Karimpour Feb 2011
112
Observer-basedObserver-based SwitchingSwitching

Pariz-Karimpour Feb 2011
113

Pariz-Karimpour Feb 2011
114
Observer-basedObserver-based SwitchingSwitching

Pariz-Karimpour Feb 2011
115
Observer-basedObserver-based SwitchingSwitching

Pariz-Karimpour Feb 2011
116
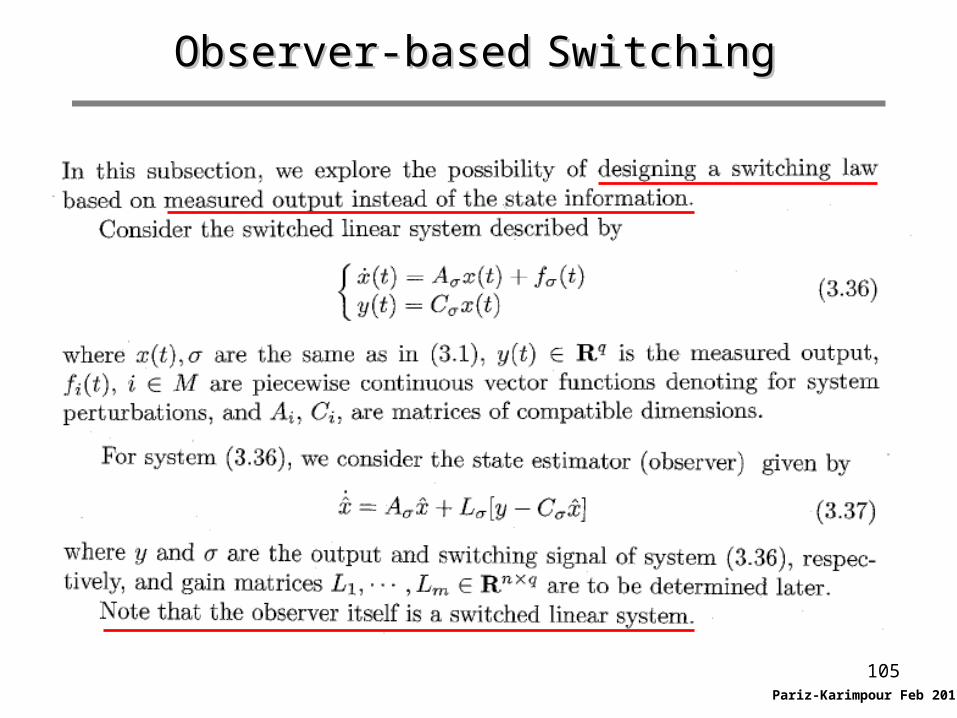
1- Check the assumption 3.2 for the system
2- Repeat the system simulatrion by
0
2
5.0
021 LL
3- Choose suitable L1 and L2 and repeat the simulation.
4- Examine the system for y=x1 for the first system and y=x2 for the second one.
Exercises:
5- According to exercise 4 derive another condition for observer base switching.

Pariz-Karimpour Feb 2011
117
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
3.6. Numerical Examples 3.6. Numerical Examples
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous Systems
Pariz-Karimpour Feb 2011
118
Pariz-Karimpour Feb 2011
119
Combined SwitchingCombined Switching

Pariz-Karimpour Feb 2011
120
Periodic switchingPeriodic switching
0
1 2 m…… 1 2 m…… 1 2 m……
Combined SwitchingCombined Switching

Pariz-Karimpour Feb 2011
121
State feedback switchingState feedback switching
Combined SwitchingCombined Switching
Pariz-Karimpour Feb 2011
122
Combined SwitchingCombined Switching

Pariz-Karimpour Feb 2011
123
3.5.1. Switching Strategy Description3.5.1. Switching Strategy Description
3.5.2. Robustness Properties3.5.2. Robustness Properties
3.5.3. Observer-based Switching3.5.3. Observer-based Switching
3.5.4. Extensions3.5.4. Extensions
Combined SwitchingCombined Switching

Pariz-Karimpour Feb 2011
124
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
125
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
126
tktk+2tk+1
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
127
Proof:
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
128
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
129
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
130
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
131
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
132
Switching Strategy DescriptionSwitching Strategy Description

Pariz-Karimpour Feb 2011
133
Switching Strategy DescriptionSwitching Strategy Description
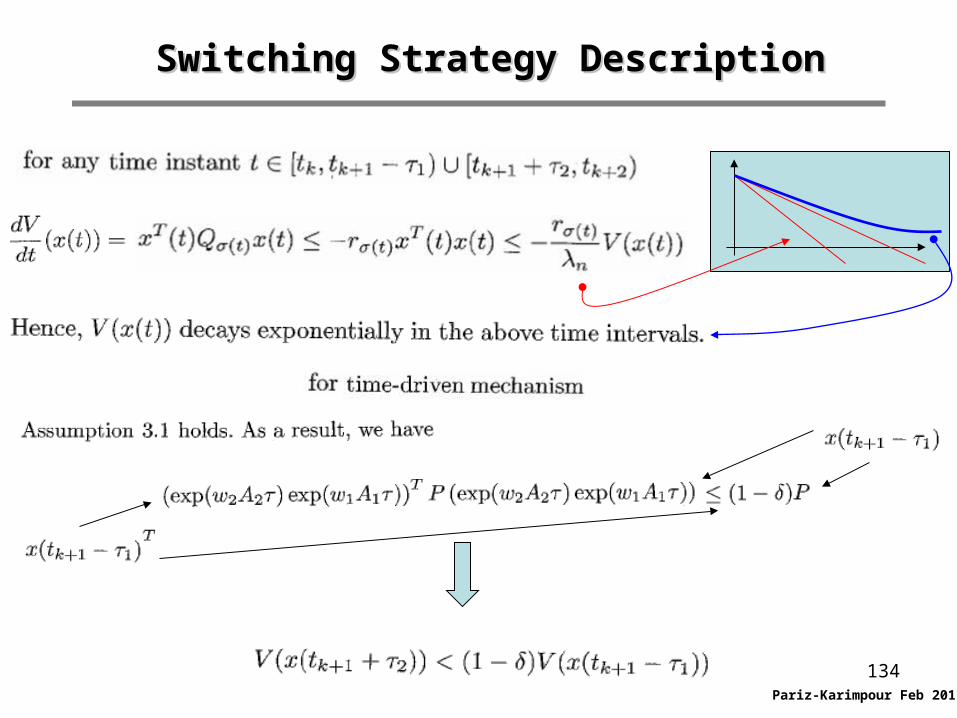
Pariz-Karimpour Feb 2011
134
Switching Strategy DescriptionSwitching Strategy Description
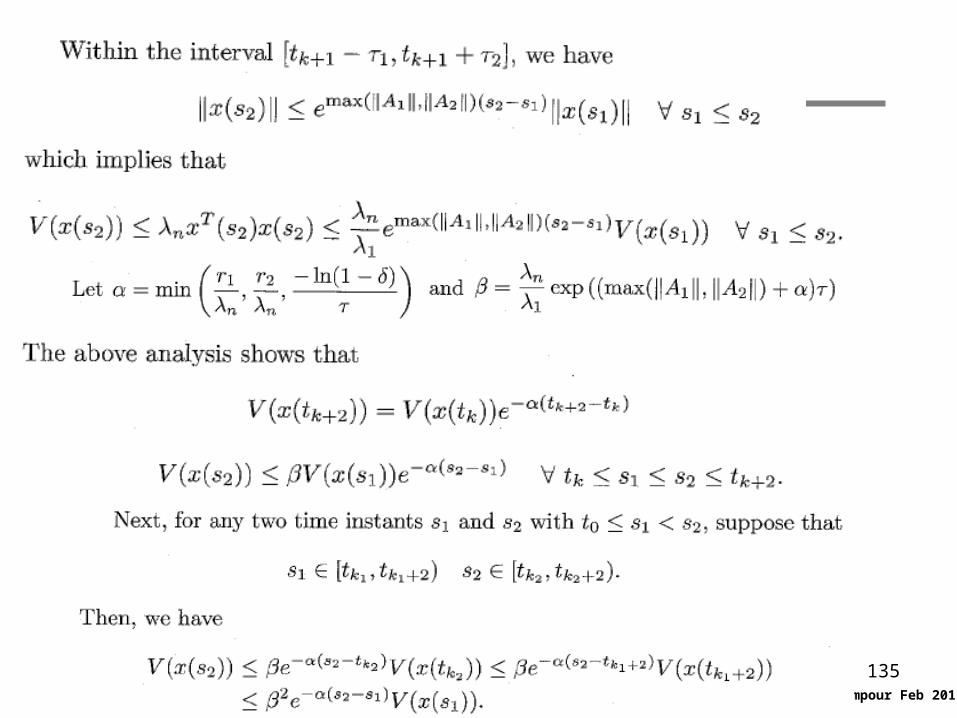
Pariz-Karimpour Feb 2011
135

Pariz-Karimpour Feb 2011
136By student (#2)
Switching Strategy DescriptionSwitching Strategy Description
Pariz-Karimpour Feb 2011
137
3.5.1. Switching Strategy Description3.5.1. Switching Strategy Description
3.5.2. Robustness Properties3.5.2. Robustness Properties
3.5.3. Observer-based Switching3.5.3. Observer-based Switching
3.5.4. Extensions3.5.4. Extensions
Combined SwitchingCombined Switching

Pariz-Karimpour Feb 2011
138Proof: By one of the student (#3)
Robustness PropertiesRobustness Properties

Pariz-Karimpour Feb 2011
139By student (#3)
Robustness PropertiesRobustness Properties

Pariz-Karimpour Feb 2011
140
3.5.1. Switching Strategy Description3.5.1. Switching Strategy Description
3.5.2. Robustness Properties3.5.2. Robustness Properties
3.5.3. Observer-based Switching3.5.3. Observer-based Switching
3.5.4. Extensions3.5.4. Extensions
Combined SwitchingCombined Switching

Pariz-Karimpour Feb 2011
141
Observer-based SwitchingObserver-based Switching

Pariz-Karimpour Feb 2011
142
Observer-based SwitchingObserver-based Switching
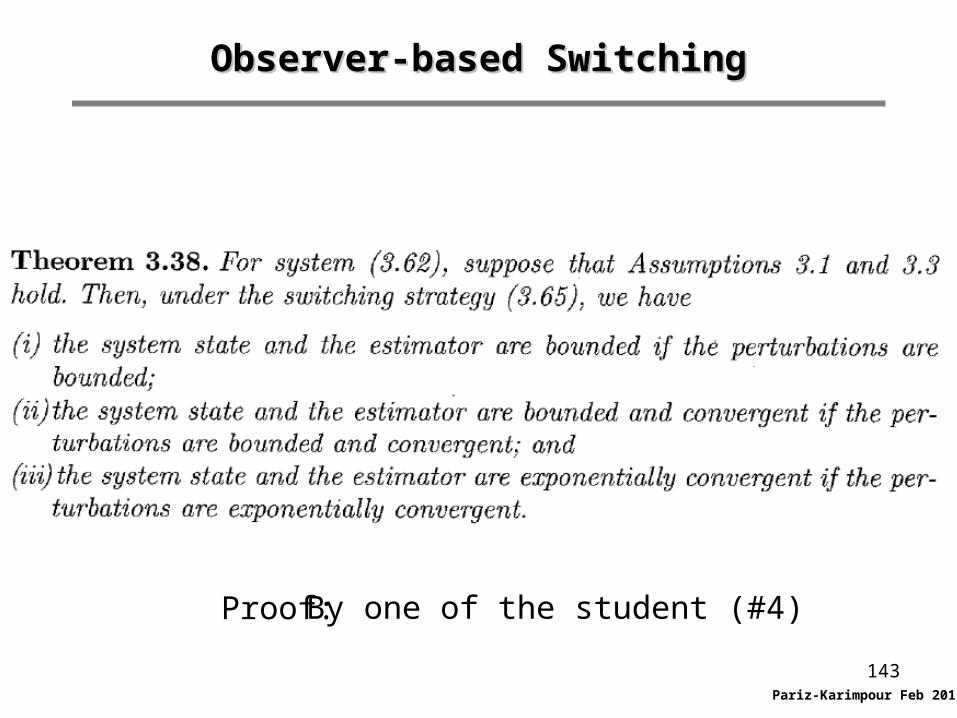
Pariz-Karimpour Feb 2011
143
Proof: By one of the student (#4)
Observer-based SwitchingObserver-based Switching

Pariz-Karimpour Feb 2011
144
3.5.1. Switching Strategy Description3.5.1. Switching Strategy Description
3.5.2. Robustness Properties3.5.2. Robustness Properties
3.5.3. Observer-based Switching3.5.3. Observer-based Switching
3.5.4. Extensions3.5.4. Extensions
Combined SwitchingCombined Switching
Pariz-Karimpour Feb 2011
145
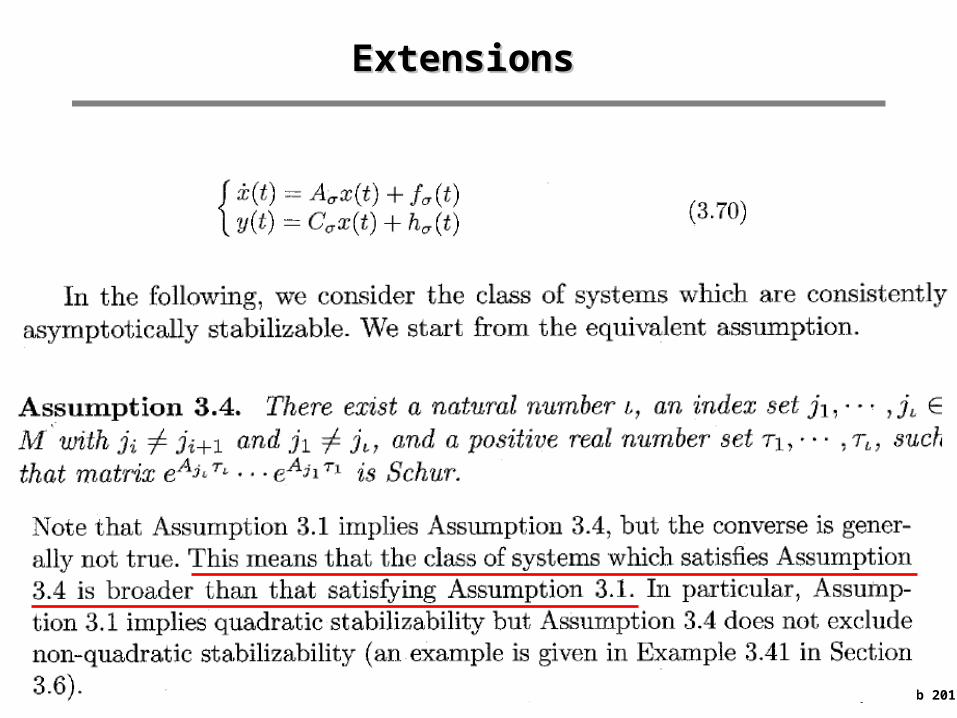
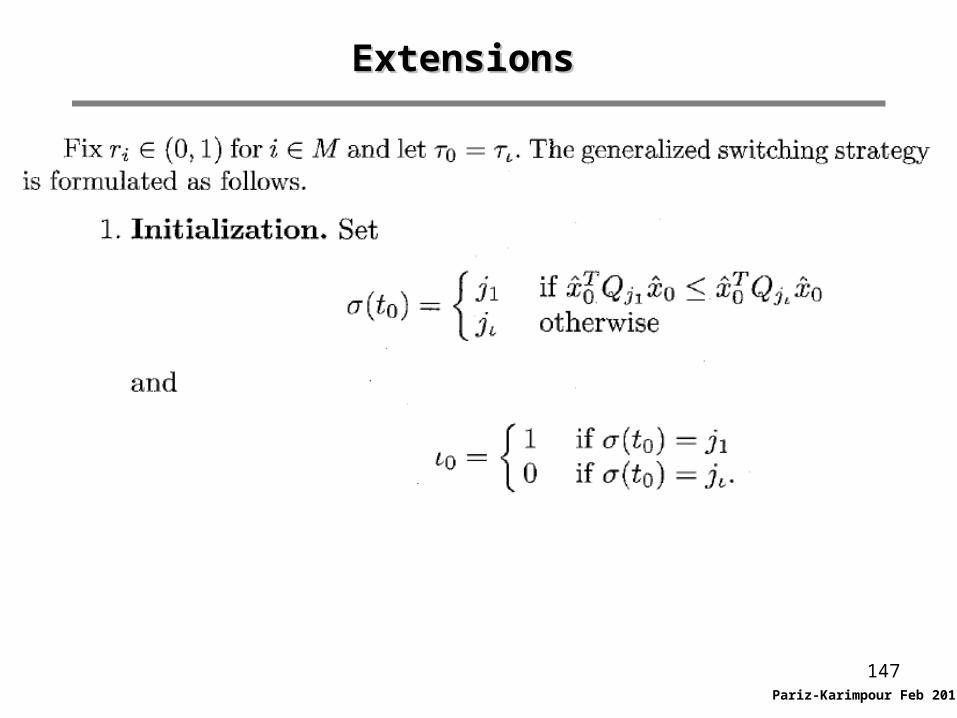
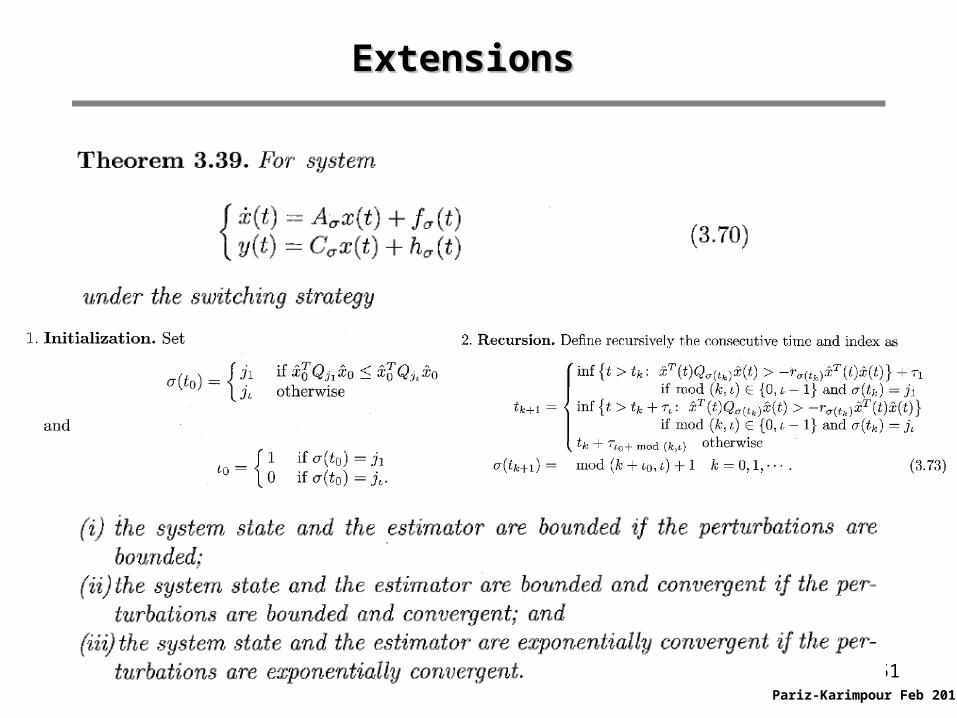
Extensions Extensions

Pariz-Karimpour Feb 2011
146
Extensions Extensions
Pariz-Karimpour Feb 2011
147
Extensions Extensions

Pariz-Karimpour Feb 2011
148
Extensions Extensions
Pariz-Karimpour Feb 2011
149
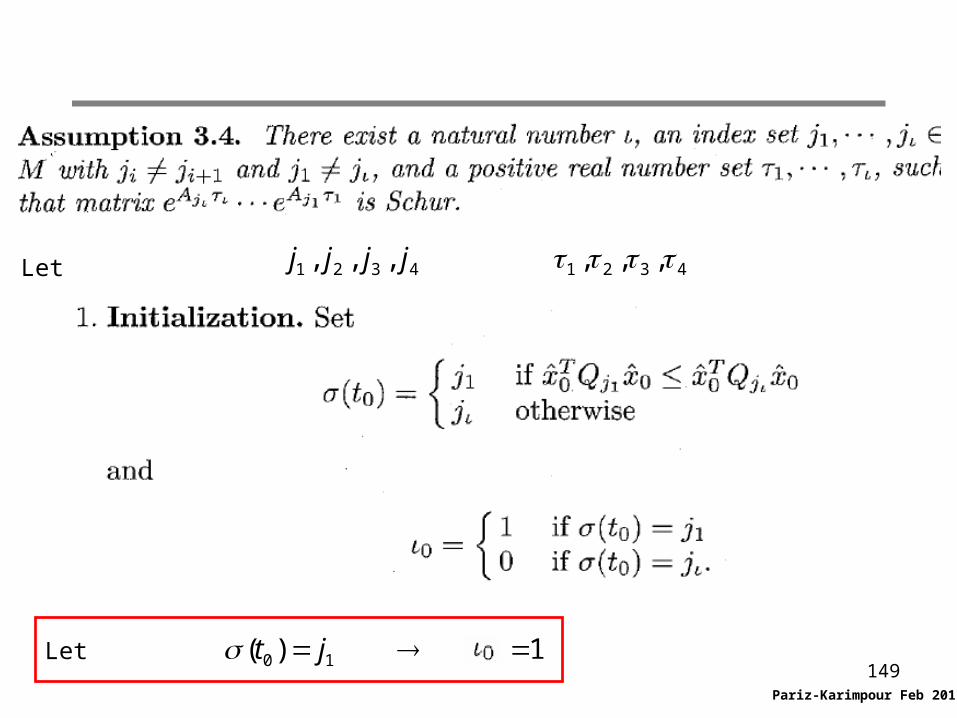
Let 4321 ,,, jjjj 4321 ,,,
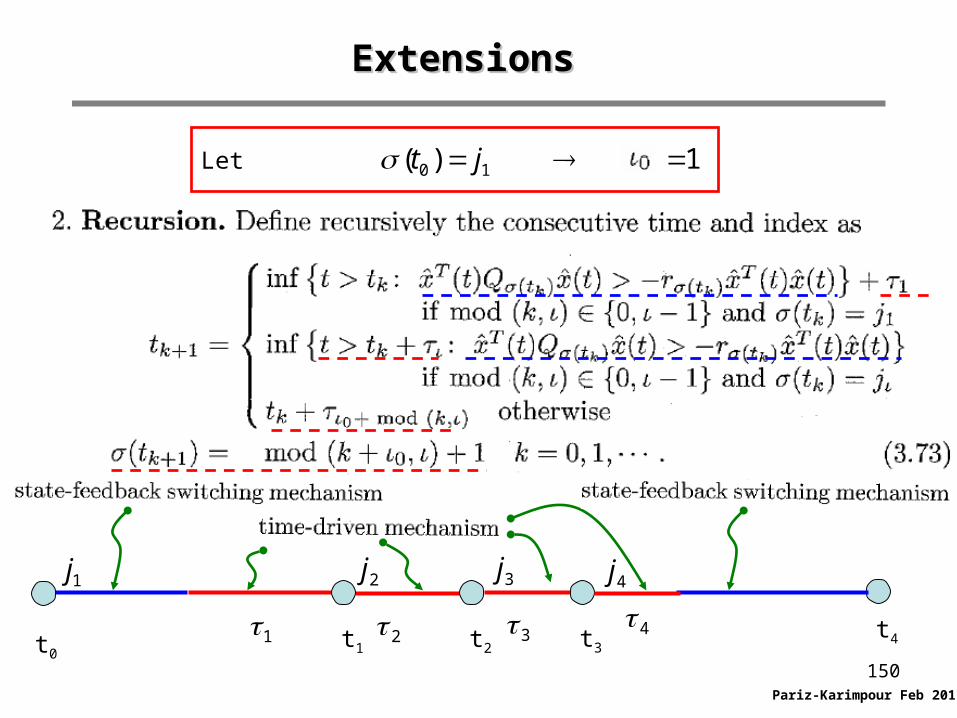
Let 1)( 10 jt
Pariz-Karimpour Feb 2011
150
Let 1)( 10 jt
t0
t4t11
1j 2j
2 t2 t3
3j 4j
3 4
Extensions Extensions
Pariz-Karimpour Feb 2011
151
Extensions Extensions

Pariz-Karimpour Feb 2011
152
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
3.6. Numerical Examples3.6. Numerical Examples
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous Systems
Pariz-Karimpour Feb 2011
153

Pariz-Karimpour Feb 2011
154
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
155
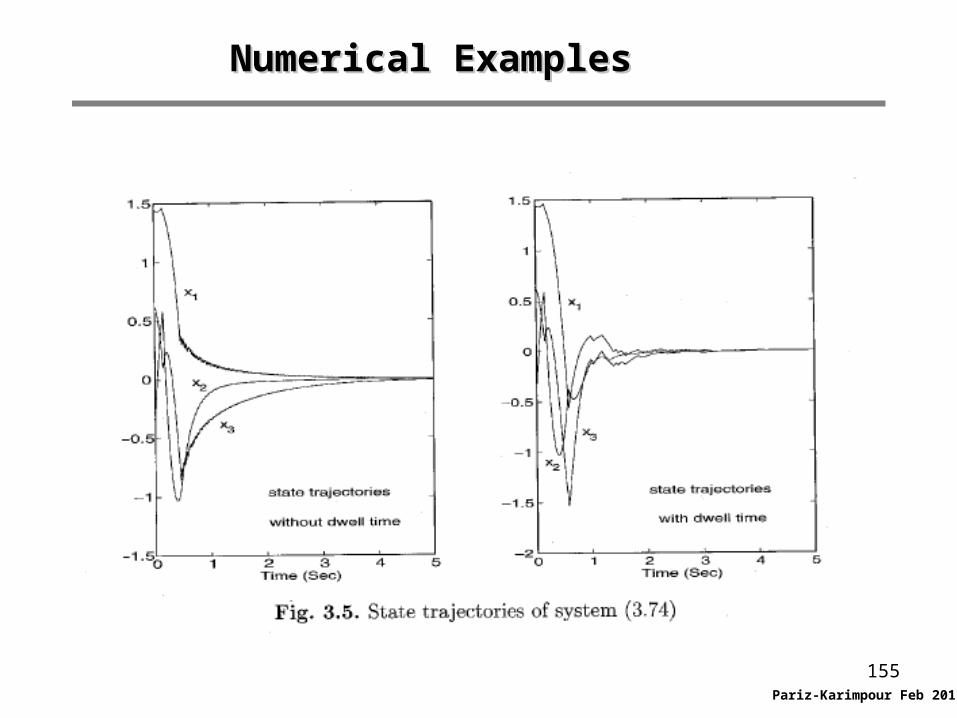
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
156
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
157
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
158
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
159
Numerical ExamplesNumerical Examples

Pariz-Karimpour Feb 2011
160
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
161
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
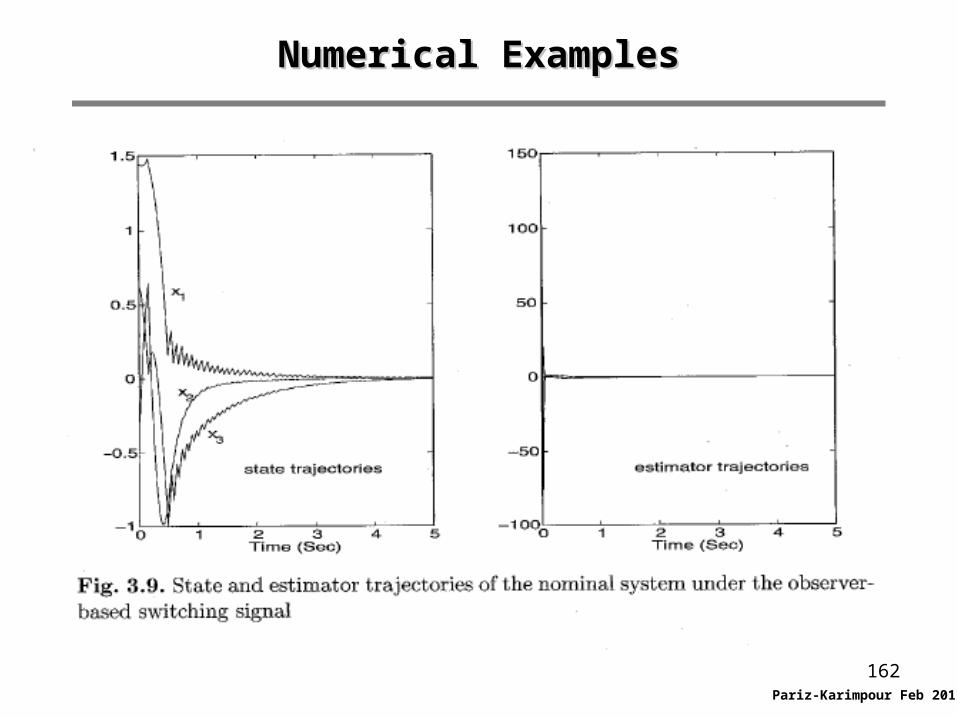
162
Numerical ExamplesNumerical Examples

Pariz-Karimpour Feb 2011
163
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
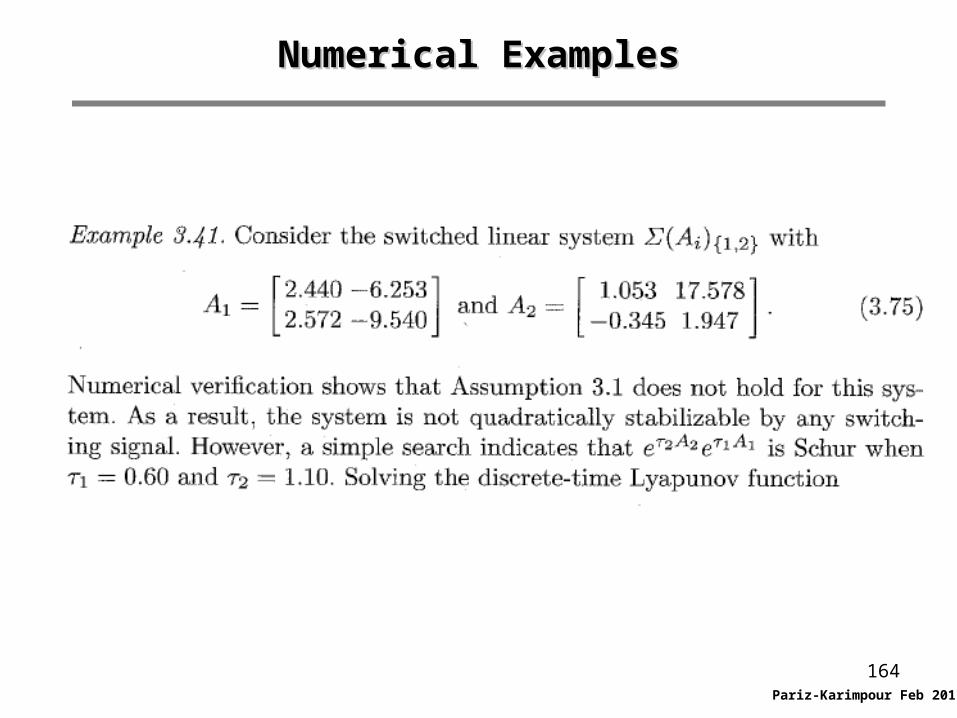
164
Numerical ExamplesNumerical Examples

Pariz-Karimpour Feb 2011
165
Numerical ExamplesNumerical Examples

Pariz-Karimpour Feb 2011
166
Numerical ExamplesNumerical Examples

Pariz-Karimpour Feb 2011
167
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
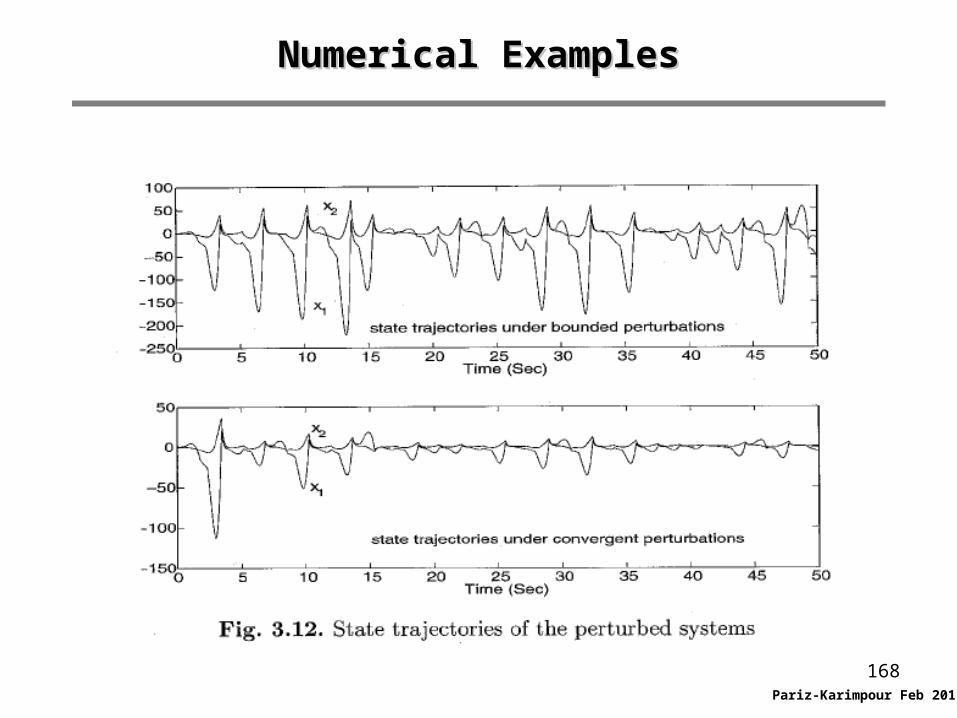
168
Numerical ExamplesNumerical Examples
Pariz-Karimpour Feb 2011
169
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
3.6. Numerical Examples 3.6. Numerical Examples
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary

Pariz-Karimpour Feb 2011
170
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary

Pariz-Karimpour Feb 2011
171
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.1. Introduction3.1. Introduction

Pariz-Karimpour Feb 2011
172
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary

Pariz-Karimpour Feb 2011
173
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.2. General Results3.2. General Results
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria

Pariz-Karimpour Feb 2011
174
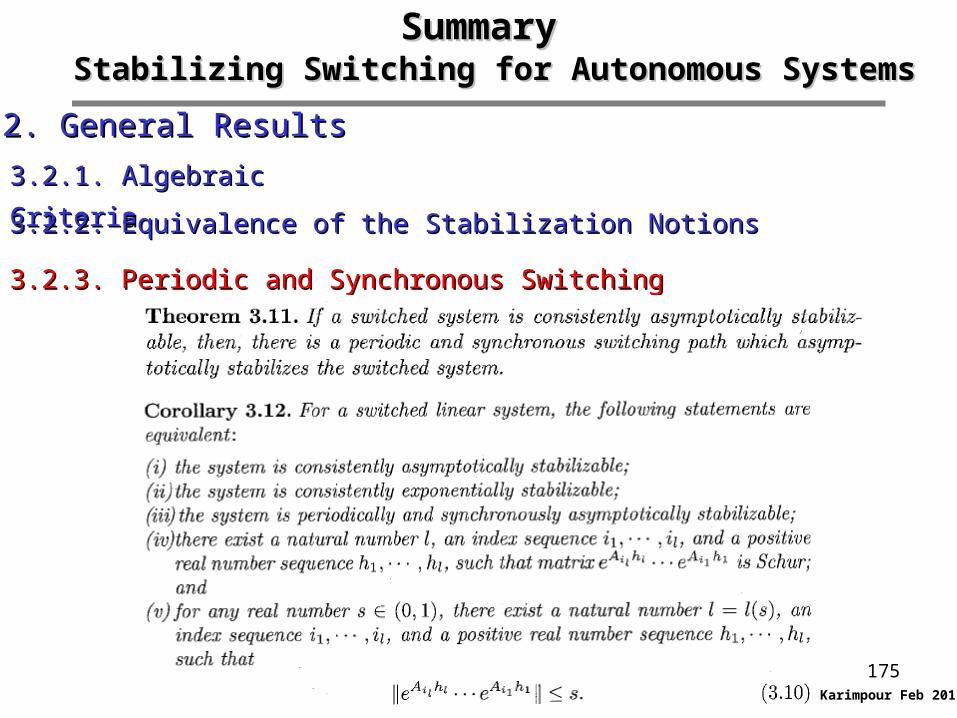
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.2. General Results3.2. General Results
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria
3.2.2. Equivalence of the Stabilization Notions3.2.2. Equivalence of the Stabilization Notions
Pariz-Karimpour Feb 2011
175
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.2. General Results3.2. General Results
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria
3.2.2. Equivalence of the Stabilization Notions3.2.2. Equivalence of the Stabilization Notions
3.2.3. Periodic and Synchronous Switching3.2.3. Periodic and Synchronous Switching

Pariz-Karimpour Feb 2011
176
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.2. General Results3.2. General Results
3.2.1. Algebraic Criteria3.2.1. Algebraic Criteria
3.2.2. Equivalence of the Stabilization Notions3.2.2. Equivalence of the Stabilization Notions
3.2.3. Periodic and Synchronous Switching3.2.3. Periodic and Synchronous Switching
3.2.4. Special Systems3.2.4. Special Systems
3.2.5. Robustness Issues3.2.5. Robustness Issues

Pariz-Karimpour Feb 2011
177
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
Pariz-Karimpour Feb 2011
178
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
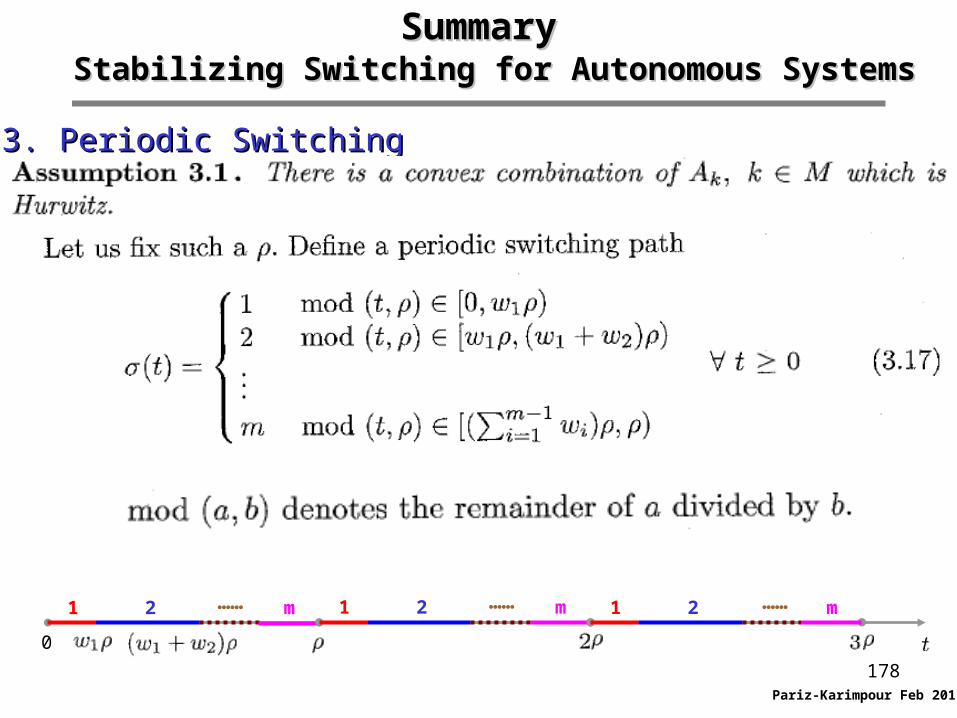
3.3. Periodic Switching3.3. Periodic Switching
0
1 2 m…… 1 2 m…… 1 2 m……

Pariz-Karimpour Feb 2011
179
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.3. Periodic Switching3.3. Periodic Switching
Pariz-Karimpour Feb 2011
180
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
Pariz-Karimpour Feb 2011
181
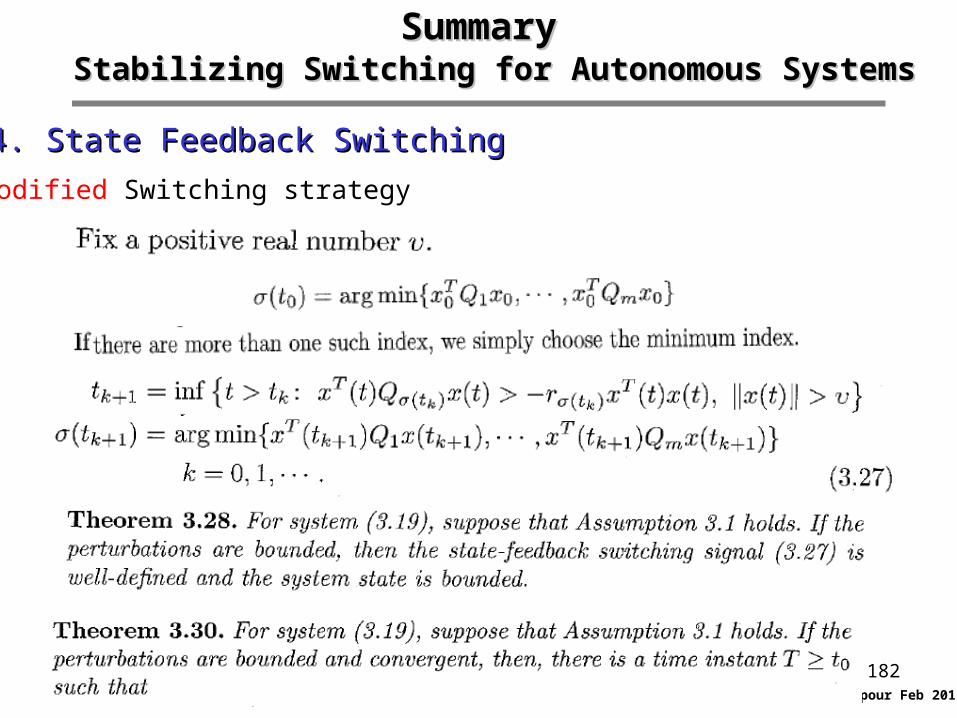
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.4. State Feedback Switching3.4. State Feedback Switching
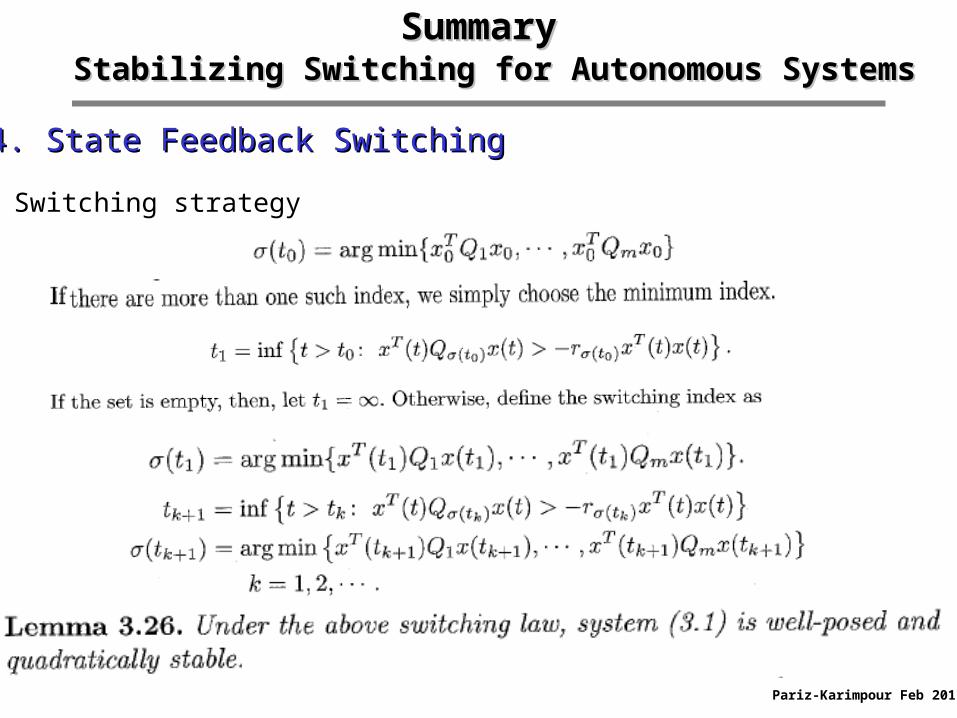
Switching strategy
Pariz-Karimpour Feb 2011
182
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.4. State Feedback Switching3.4. State Feedback Switching
Modified Switching strategy

Pariz-Karimpour Feb 2011
183
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.4. State Feedback Switching3.4. State Feedback Switching
Observer Based Switching strategy

Pariz-Karimpour Feb 2011
184
3.1. Introduction3.1. Introduction
3.2. General Results3.2. General Results
3.3. Periodic Switching3.3. Periodic Switching
3.4. State-feedback Switching3.4. State-feedback Switching
3.5. Combined Switching3.5. Combined Switching
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary

Pariz-Karimpour Feb 2011
185
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.5. Combined Switching3.5. Combined Switching
Pariz-Karimpour Feb 2011
186
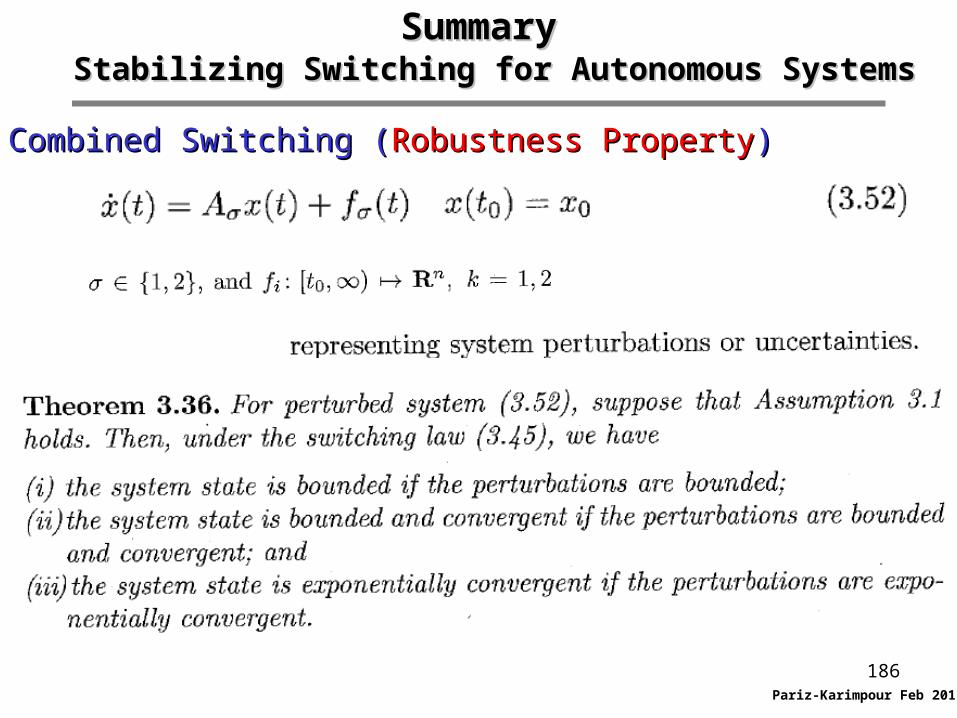
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.5. Combined Switching (3.5. Combined Switching (Robustness PropertyRobustness Property))
Pariz-Karimpour Feb 2011
187
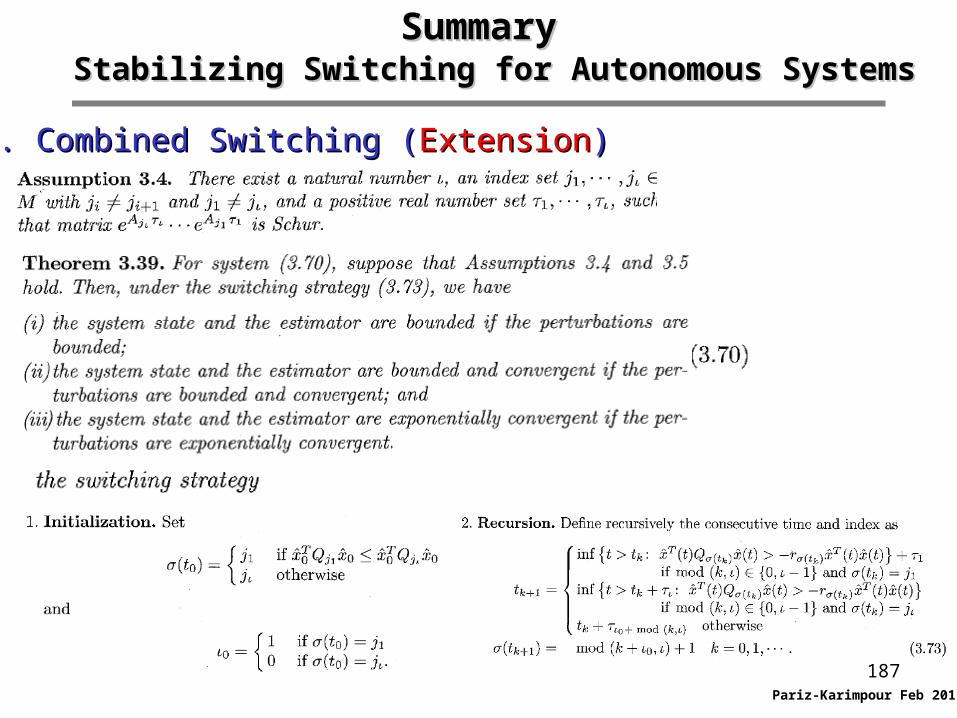
Stabilizing Switching for Autonomous SystemsStabilizing Switching for Autonomous SystemsSummarySummary
3.5. Combined Switching (3.5. Combined Switching (ExtensionExtension))

Pariz-Karimpour Feb 2011
188