optimization of the axial porosity … · the liquid-piston compressor is used for compressed air...
TRANSCRIPT

1 Copyright © 2013 by ASME
Proceedings of the ASME 2013 International Mechanical Engineering Congress and Exposition IMECE2013
Nov. 15-21, 2013, San Diego, CA, USA
IMECE2013-63862
OPTIMIZATION OF THE AXIAL POROSITY DISTRIBUTION OF POROUS INSERTS IN A LIQUID-PISTON GAS COMPRESSOR USING A ONE-DIMENSIONAL FORMULATION
Chao Zhang Department of Mechanical
Engineering University of Minnesota Minneapolis, MN55414
Terrence W. Simon Department of Mechanical
Engineering University of Minnesota Minneapolis, MN55414
Perry Y. Li Department of Mechanical
Engineering University of Minnesota Minneapolis, MN55414
[email protected] [email protected] [email protected]
ABSTRACT A One-Dimensional (One-D) numerical model to calculate
transient temperature distributions in a liquid-piston compressor
with porous inserts is presented. The liquid-piston compressor is
used for Compressed Air Energy Storage (CAES), and the
inserted porous media serve the purpose of reducing temperature
rise during compression. The One-D model considers heat
transfer by convection in both the fluids (gas and liquid) and
convective heat exchange with the solid. The Volume of Fluid
(VOF) method is used in the model to deal with the moving
liquid-gas interface. Solutions of the One-D model are validated
against full CFD solutions of the same problem but within a
two-dimensional computation domain, and against another study
given in the literature.
The model is used to optimize the porosity distribution, in
the axial direction, of the porous insert. The objective is to
minimize the compression work input for a given piston speed
and a given overall pressure compression ratio. The model
equations are discretized and solved by a finite difference
method. The optimization method is based on sensitivity
calculations in an iterative procedure. The sensitivity is the
partial derivative of compression work with respect to the
porosity value at each optimization node. In each optimization
round, the One-D model is solved as many times as there are
optimization nodes, and each time the porosity value at a single
optimization node is changed by a small amount. From these
calculations, the sensitivity of changing the porosity distribution
to the total work input (objective) is obtained. Based on this, the
porosity distribution is updated in the direction that favors the
objective. Then, the optimization procedure marches to the next
round and the same calculations are completed iteratively until
an optimum solution is reached. The optimization shows that
porous media with high porosity should be used in the lower
part of the chamber and porous media with low porosity should
be used in the upper part of the chamber. An optimal distribution
of porosity over the chamber is obtained.
1. INTRODUCTION Liquid-piston gas compressors with porous inserts can be
used for Compressed Air Energy Storage (CAES). In
power-producing systems, the CAES approach is used in order
to overcome the mismatch between power demand and power
generation, [1] and [2], by storage and discharge. During low
power demand periods, excess power is used to compress air
and the compressed air is stored in a vessel. During high power
demand periods, the compressed air is expanded to output work.
An important characteristic of efficient and effective CAES
operation is near-isothermal compression, as discussed in [2] –
[6]. The main reason for this is that compression typically
results in a temperature rise of the air and the extra thermal
energy due to the temperature rise is wasted during the storage
period as the compressed air cools to the ambient temperature.
Therefore, in order to reduce temperature rise during
compression, porous media, which have large surface areas per
volume, are inserted into the liquid-piston gas compressor. The
term “liquid-piston” implies that the compression of the gas is
done with a rising liquid-gas interface created by pumping
liquid into the lower section of the compression chamber. A
previous study has shown that liquid-piston has an advantage
over traditional solid piston in terms of power consumption [7].
Another advantage of the liquid piston is that it does not
compromise volume compression ratio, as the liquid can flow
through the porous media and can be effectively cooled by the
media.
The present study develops a one-dimensional (One-D)
numerical model for the liquid-piston compressor with porous
inserts. Although higher-dimensional CFD studies on related
subjects have already been done and they can resolve in detail
the flow fields [8] – [12], the One-D numerical model is far less

2 Copyright © 2013 by ASME
computationally expensive, and is therefore easier to utilize in
the optimization analysis.
In the past, many studies have been done to investigate
simplified numerical models for regenerative heat exchangers
that operate in cycles. Each cycle consists of a cooling phase
and a heating phase. In the present study, the porous inserts play
the same role as regenerative heat exchangers when the
exchangers are operating in the cooling phase to cool the fluid.
An early simplified model of regenerative heat exchangers
couples the spatial advection of fluid energy with the transient
storage of energy in the solid, and solves the equations [13]. By
using superposition methods, the solution is extended to solve
various thermal entry problems [14]. Regenerative heat
exchanger analysis in a system that uses by-pass flow to control
the outlet gas temperature was solved in [15] and [16].
Optimization was introduced to maximize thermal efficiency of
the heating phase of a regenerative heat exchanger [17]. Effects
of residual gas from the previous cycle in the exchangers are
modeled in [18]. Two bulk average heat transfer coefficients,
one being linearly proportional to the gas flow rate, and the
other being linearly proportional to the surface heat transfer
coefficient, are analyzed and compared in [19]. Improved
numerical method to solve the same equations employing
Richardson extrapolation was introduced in [20]. The modeling
to include the transient change of gas temperature was
introduced in [21] – [23]. The model is further improved by
including thermal conduction in the solid in the direction
parallel to the flow [24].
Compared to the present study, the major differences of the
flow situations in the aforementioned literature [13] – [24] are:
(1) the air is not compressed to high pressure ratio in the
exchangers, and (2) there is no moving liquid-air interface in the
exchangers. A one-energy-equation, zero-dimensional (Zero-D)
model for compression of air in a long, thin channel has been
proposed for modeling compression [25]. This model was
further developed into a two-energy-equation, Zero-D model to
simulate liquid-piston compression in a chamber filled with
interrupted-plate heat exchangers, for solution of the transient
temperatures of both the fluid and solid of the exchanger [26].
Yet, in [25] and [26], the numerical models are not capable of
calculating transient spatial distributions of temperature since
they are Zero-D models.
In order to model the liquid-piston compression in a
one-dimensional fashion, the Volume of Fluid (VOF) method
[27] is used. The VOF method tracks bulk locations of liquid
and gas by solving volume fraction scalar fields. This concept is
used in the One-D model in the present study to handle the
moving liquid-air interface (liquid-piston surface).
2. THE ONE-D NUMERICAL MODEL 2.1. Governing Equations
The compression process in a liquid piston air compressor
is formulated considering time variations and spatial variations
in the chamber axial direction. A schematic of the compressor is
shown in Fig. 1. Water is pumped into a chamber filled with
porous inserts to compress the air. At the beginning of the
compression process, the water-air interface starts at the bottom
of the chamber. The spatial-average of the inlet water velocity
has a constant value of 𝑈0. Since water is incompressible, it is
assumed that the water-air interface also moves at velocity 𝑈0 .
The water-air interface position at any time during compression
is,
𝑥𝑝 = 𝑥𝑝(𝑡) = 𝑈0𝑡 (1)
The velocity of air is
assumed to be linearly
distributed along the 𝑥
axis, matching the water
(interface) velocity at the
water-air interface, and
zero at the top cap. The
velocity field of air and
water are given by,
𝑢 = 𝑢(𝑥, 𝑡) =
{𝑈0, 𝑥 < 𝑥𝑝
𝑈0𝐿−𝑥
𝐿−𝑥𝑝, 𝑥 ≥ 𝑥𝑝
(2)
Using the VOF method, volume fractions of air and water
are defined. The volume fraction is a scalar function that gives
the fraction of volume occupied by a single phase at a location.
The sum of volume fractions of the two phases at any location
equals 1.
𝛼1 + 𝛼2 = 1 (3)
where subscripts 1 and 2 refer to the air and water phase,
respectively.
The volume fraction values track bulk locations of the
water and air phases. Velocity fields and temperature fields are
shared by the two phases. The continuity equation for air is,
𝜕𝛼1𝜌1
𝜕𝑡+
𝜕𝛼1𝜌1𝑢
𝜕𝑥= 0 (4)
Since water is incompressible, the continuity equation of water
gives,
𝜕𝛼2
𝜕𝑡+
𝜕𝛼2𝑢
𝜕𝑥= 0 (5)
The energy transport in the fluid mixture, which is made up of
immiscible water and air, is governed by,
𝜖𝜕𝜌𝑐𝑝 𝑇
𝜕𝑡+ 𝜖
𝜕𝜌𝑐𝑝 𝑢𝑇
𝜕𝑥
= 𝑘𝜖𝜕2𝑇
𝜕𝑥2+ 𝛼1𝛽1𝑇(
𝜕𝑝
𝜕𝑡+ 𝑢
𝜕𝑝
𝜕𝑥) + ℎ𝑉(𝑇𝑠 − 𝑇)
(6)
where,
𝜌𝑐𝑝 = 𝛼1𝜌1𝑐𝑝,1 + 𝛼2𝜌2𝑐2 (7)
𝑘 = 𝛼1𝑘1 + 𝛼2𝑘2 (8)
Fig. 1. Schematic of compressor

3 Copyright © 2013 by ASME
When solving Eq. (6), the pressure in the work terms can be
substituted by temperature and air density using the ideal gas
law,
𝑝 = 𝜌1𝑅𝑇 (9)
The energy transport in the solid is given by,
(1 − 𝜖)𝜌𝑠𝑐𝑠𝜕𝑇𝑠
𝜕𝑡= 𝑘𝑠(1 − 𝜖)
𝜕2𝑇𝑠
𝜕𝑥2− ℎ𝑉(𝑇𝑠 − 𝑇) (10)
Equations (4), (5), (6), and (10) are the governing equations of
fluid flow in a liquid-piston air compressor with porous inserts.
The boundary conditions are:
𝑢(𝑥 = 0) = 𝑈0 (11)
𝑢(𝑥 = 𝐿) = 0 (12)
𝑇(𝑥 = 0) = 𝑇(𝑥 = 𝐿) = 𝑇0 (13)
The isothermal temperature condition on the wall (𝑥 = 𝐿) is
used in the numerical model. The main reason for this is that: (1)
in applications, the compressor wall is usually made of metal,
which has much larger thermal capacity and density than air,
and thus the wall would require much more heat absorption to
increase its temperature than air would, and (2) the compression
time is usually in just seconds, which is too short a time period
for the compressor wall to heat up.
The energy equations of the fluid and solid are coupled
through interfacial heat transfer. Kamiuto and Yee proposed a
heat transfer correlation for porous media [28], which gives a 40%
uncertainty compared to sixteen sets of experimental data on
different porous media. The correlation is further converted to
be based on the length scale pore size by [29], which is then
used in [12] for a metal foam of 93% porosity. The correlation is
given by,
𝑁𝑢𝑉 =ℎ𝑉𝐷𝑝
2
𝑘= 0.996(
𝜌𝜖𝑢𝐷𝑝
𝜇𝑃𝑟)0.791 (14)
Parameter 𝐷𝑝 is a characteristic length based on the pore
structure of the porous medium. It is 3.61mm in the present
study. It is assumed that the heat transfer between air and solid
and the heat transfer between water and solid follow the same
dimensionless heat transfer correlation. The fluid mixture
density, viscosity and Prandtl number are given by,
𝜌 = 𝛼1𝜌1 + 𝛼2𝜌2 (15)
𝜇 = 𝛼1𝜇1 + 𝛼2𝜇2 (16)
𝑃𝑟 = 𝛼1𝑃𝑟1 + 𝛼2𝑃𝑟2 (17)
2.2. Numerical Method
Equations (4), (5), (6), and (10) are solved by a finite
difference method. The continuity equations for water and air
are discretized using an explicit upwind method. They are given
by:
𝛼2,𝑗𝑛+1 − 𝛼2,𝑗
𝑛
𝛥𝑡+𝛼2,𝑗
𝑛𝑢2,𝑗𝑛 − 𝛼2,𝑗−1
𝑛𝑢2,𝑗−1𝑛
𝛥𝑥= 0
(18)
𝛼1,𝑗𝑛+1𝜌1,𝑗
𝑛+1 − 𝛼1,𝑗𝑛𝜌1,𝑗
𝑛
𝛥𝑡
+𝛼1,𝑗
𝑛𝜌1,𝑗𝑛𝑢1,𝑗
𝑛 − 𝛼1,𝑗−1𝑛𝜌1,𝑗−1
𝑛𝑢1,𝑗−1𝑛
𝛥𝑥= 0
(19)
Because of the advection term in the transport of fluid energy
equation, it is discretized using an explicit scheme, with upwind
differencing on the advection term and central differencing on
the diffusion term.
(𝜌𝑐𝑝 𝑗
𝑛+1 − 𝛼1,𝑗𝑛+1𝜌1,𝑗
𝑛+1𝑅)𝑇𝑗𝑛+1 − (𝜌𝑐𝑝
𝑗
𝑛 − 𝛼1,𝑗𝑛 𝜌1,𝑗
𝑛 𝑅)𝑇𝑗𝑛
𝛥𝑡
+𝜌𝑐𝑝
𝑗
𝑛𝑢𝑗𝑛𝑇𝑗
𝑛 − 𝜌𝑐𝑝 𝑗−1
𝑛 𝑢𝑗−1𝑛 𝑇𝑗−1
𝑛
𝛥𝑥−ℎ𝑉𝑗
𝑛(𝑇𝑠,𝑗𝑛 − 𝑇𝑗
𝑛)
𝜖
= 𝑘𝑗𝑛 𝑇𝑗−1
𝑛 −2𝑇𝑗𝑛+𝑇𝑗+1
𝑛
𝛥𝑥2+
𝛼1,𝑗𝑛 𝜌1,𝑗
𝑛 𝑅𝑢𝑗𝑛𝑇𝑗
𝑛−𝛼1,𝑗−1𝑛 𝜌1,𝑗−1
𝑛 𝑅𝑢𝑗−1𝑛 𝑇𝑗−1
𝑛
𝛥𝑥
(20)
The energy transport in the solid is governed by diffusion. Thus
the solid energy equation is discretized using an implicit scheme,
with central differencing in space. It is given by
𝑎𝑠,𝑗𝑇𝑗−1𝑛+1 + 𝛽𝑠,𝑗𝑇𝑗
𝑛+1 + 𝜒𝑠,𝑗𝑇𝑗+1𝑛+1 = 𝛾𝑠,𝑗 (21)
where,
𝑎𝑠,𝑗 = −𝑘𝑠
𝛥𝑥2 (22)
𝛽𝑠,𝑗 =𝜌𝑠𝑐𝑠
𝛥𝑡+
2𝑘𝑠
𝛥𝑥2+
ℎ𝑣,𝑗𝑛+1
1−𝜖𝑗 (23)
𝜒𝑠,𝑗 = −𝑘𝑠
𝛥𝑥2 (24)
𝛾𝑠,𝑗 =𝜌𝑠𝑐𝑠
𝛥𝑡𝑇𝑠,𝑗
𝑛 +ℎ𝑣,𝑗
𝑛+1
1−𝜖𝑗𝑇𝑗
𝑛+1 (25)
Let the computational domain be discretized by 𝑁𝑛 number of
nodes; 0 denotes the node at 𝑥 = 0, and 𝑁𝑛 − 1 denotes the
node at 𝑥 = 𝐿. Equation (21) is written in matrix form for all
the nodes in the computational domain:
4 Copyright © 2013 by ASME
[ 𝛽𝑠,1 𝜒𝑠,1𝑎𝑠,2 𝛽𝑠,2 𝜒𝑠,2
… … …… … 𝜒𝑠,𝑁𝑛−3
𝑎𝑠,𝑁𝑛−2 𝛽𝑠,𝑁𝑛−2]
[ 𝑇𝑠,1𝑇𝑠,2…
𝑇𝑠,𝑁𝑛−3𝑇𝑠,𝑁𝑛−2]
𝑛+1
=
[
𝛾1 − 𝑎𝑠,1𝑇𝑠,0𝛾2. . .
𝛾𝑁𝑛−3𝛾𝑁𝑛−2 − 𝜒𝑠,𝑁𝑛−1𝑇𝑠,𝑁𝑛−1]
(26)
Using the Thomas algorithm, the matrix on the LHS of Eq. (26)
is converted into an upper diagonal matrix. Then the
temperature values are solved by back substitution, starting from
node 𝑁𝑛 − 2 and moving toward node 1.
2.3. Solution and Validation
A compression problem in a liquid-piston compressor with
porous inserts is solved. The dimension of the compression
domain, compression speed, and physical properties are given in
Table 1. The thermal conductivity of air is obtained by fitting
the conductivity data (from [30]). The total compression time is
2.6 seconds. Water starts entering the compressor from the
bottom of the chamber (𝑥 = 0). The chamber is occupied by a
porous insert having an interfacial heat transfer correlation with
surrounding fluid that follows Eq. (14). The computation is run
on a mesh with 3500 axial nodes and over 30,000 time steps
(∆𝑡 = 8.667 × 10−5𝑠𝑒𝑐𝑜𝑛𝑑𝑠). A C++ code is written to solve
the governing equations.
Table 1. List of Parameters and Properties
𝐿 = 0.29
𝑐𝑝,1 = 100 (𝑘 )
𝜇2 = 1.002 × 10−3𝑃𝑎 𝑠
𝜌2 = 1000 3⁄
𝑐2 = 181. (𝑘 ) 𝑃𝑟2 = .
𝑇0 = 297
𝑈0 = 0.10 𝑠⁄
𝑃𝑟1 = 0.71
𝜌0 = 1.192 3⁄
= 287.06 (𝑘 ) 𝑘2 = 0. 6 ( ) 𝜌𝑠 = 2719 3⁄ 𝑐𝑠 = 871 (𝑘 )
𝜇1 = 1.716 × 10−5 × (𝑇
27 )2 3
𝑃𝑎 𝑠
𝑘1 = (0.00 68 06 +7.16 7 × 10−5𝑇
) ( )⁄
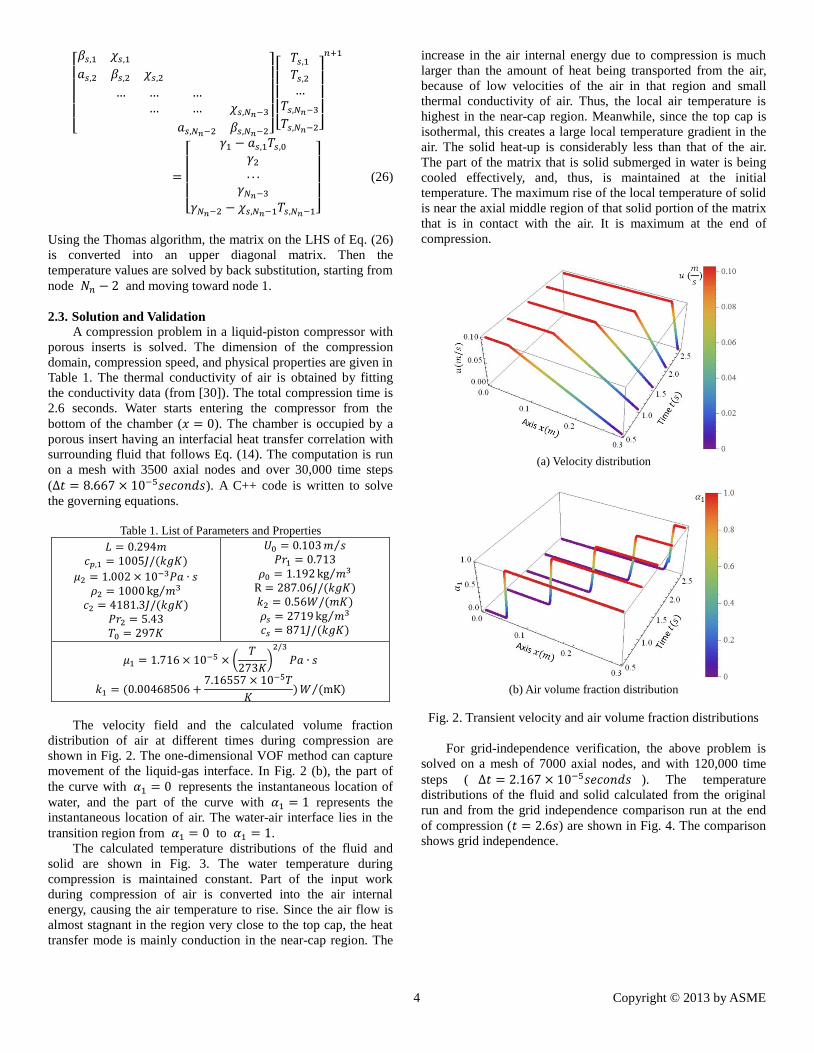
The velocity field and the calculated volume fraction
distribution of air at different times during compression are
shown in Fig. 2. The one-dimensional VOF method can capture
movement of the liquid-gas interface. In Fig. 2 (b), the part of
the curve with 𝛼1 = 0 represents the instantaneous location of
water, and the part of the curve with 𝛼1 = 1 represents the
instantaneous location of air. The water-air interface lies in the
transition region from 𝛼1 = 0 to 𝛼1 = 1.
The calculated temperature distributions of the fluid and
solid are shown in Fig. 3. The water temperature during
compression is maintained constant. Part of the input work
during compression of air is converted into the air internal
energy, causing the air temperature to rise. Since the air flow is
almost stagnant in the region very close to the top cap, the heat
transfer mode is mainly conduction in the near-cap region. The
increase in the air internal energy due to compression is much
larger than the amount of heat being transported from the air,
because of low velocities of the air in that region and small
thermal conductivity of air. Thus, the local air temperature is
highest in the near-cap region. Meanwhile, since the top cap is
isothermal, this creates a large local temperature gradient in the
air. The solid heat-up is considerably less than that of the air.
The part of the matrix that is solid submerged in water is being
cooled effectively, and, thus, is maintained at the initial
temperature. The maximum rise of the local temperature of solid
is near the axial middle region of that solid portion of the matrix
that is in contact with the air. It is maximum at the end of
compression.
(a) Velocity distribution
(b) Air volume fraction distribution
Fig. 2. Transient velocity and air volume fraction distributions
For grid-independence verification, the above problem is
solved on a mesh of 7000 axial nodes, and with 120,000 time
steps ( ∆𝑡 = 2.167 × 10−5𝑠𝑒𝑐𝑜𝑛𝑑𝑠 ). The temperature
distributions of the fluid and solid calculated from the original
run and from the grid independence comparison run at the end
of compression (𝑡 = 2.6𝑠) are shown in Fig. 4. The comparison
shows grid independence.

5 Copyright © 2013 by ASME
(a) Fluid temperature distribution
(b) Solid temperature distribution
Fig.3. Transient temperature distributions
(a) 𝑇(𝑡 = 2.6𝑠) (b) 𝑇𝑠(𝑡 = 2.6𝑠)
Fig.4. Temperature distributions at the end of compression
(𝑡 = 2.6𝑠) from the original solution and from the finer-grid
solution for grid-independence verification
For validation purposes, solutions of a two-dimensional
(Two-D), axisymmetric CFD simulation of a liquid-piston
compressor fully occupied by porous inserts are taken from [12]
and compared to the One-D solutions of the present study. The
two compression problems being solved are identical. The
radius of the chamber is 0.0254m in [12]. The radius is not of
concern to the present, One-D computation. The fluid
temperature distribution from the present One-D solution is
compared with the centerline temperature distribution from the
Two-D CFD solution, and also compared to the Two-D
temperature field in Fig. 5. The comparison shows that the
One-D model can capture the important features of the transient
axial temperature distribution of the fluid mixture in the
chamber. The Two-D temperature fields show high temperature
streaks in the region very close to the top cap. This is consistent
with the One-D solution. The physical reasons are that the flow
is mostly stagnant in that region, and the increase in the internal
energy added due to compression work is much greater than the
energy being conducted away to the solid phase in that region.
The solid temperature distributions calculated from the One-D
and Two-D solutions are shown in Fig. 6. Comparing the One-D
solid temperature distribution and the centerline temperature
distribution from the Two-D solution, one sees that the
maximum local temperature difference is less than 4K. This is
due to a lack of radial conduction in the One-D problem.
Although this difference appears large in the scaled plot, the
overall shape of the One-D solid temperature curve correctly
represents the same feature of the solid temperature distribution
from the Two-D solution.
(a) Fluid temperature, 𝑡 =2
5𝑡𝑓 = 1.0 s
(b) Fluid temperature, 𝑡 = 𝑡𝑓 = 2.6s
Fig. 5. Comparisons of fluid temperature distributions between
One-D solution and Two-D solution from [12]
Fig. 6. Comparisons of solid temperature distribution at
𝑡𝑓 = 2.6 seconds between the One-D solution and Two-D
solution from [12]

6 Copyright © 2013 by ASME
3. OPTIMIZATION USING THE ONE-D MODEL 3.1. Optimization Objective and Constraints
An optimization problem now being addressed by using the
One-D model developed in the previous section is of the
distribution of porosity inside the chamber. As mentioned earlier,
the purpose of inserting porous media in the compressor is to
reduce temperature rise during compression. From the heat
transfer point of view, a larger percentage of solid material,
which indicates lower porosity, leads to less temperature rise of
air. If the temperature rise could be minimized, less compression
work would be needed to maintain the air pressure at the storage
pressure as the compressed air cools to the ambient temperature.
If isothermal compression could be achieved, no additional
pressure work would be needed for there would be no
cool-down. On the other hand, a larger percentage of solid
material also increases flow drag due to the liquid and air
moving through the porous material, which potentially requires
more compression work to overcome. Thus, the optimization
goal is to find the porosity distribution for the porous media that
minimizes the work input. The porosity value in this problem is
bound by the values [0.7, 0.96]. A major constraint to the optimization problem is the fixed
power density. Based on the previous work in [5], [6] and [26],
the power density is the storage energy per unit volume divided
by the compression time. The storage energy is the amount of
work output as the compressed air undergoes an isothermal
expansion process. Therefore, the power density is given by:
𝑃𝑜𝑤 =𝐸𝑠
𝑉0𝑡𝑓=
𝑚𝑅𝑇0(ln(𝜁)−1+1
𝜁)
𝑉0𝑡𝑓=
𝜌0𝑅𝑇0(ln(𝜁)−1+1
𝜁)
𝑡𝑓 (27)
In the optimization problem, the power density is fixed by fixing
the compression time and the pressure compression ratio. As the
porosity distribution is gradually updated during optimization,
the compression speed also needs to be updated accordingly to
meet the requirement of fixed compression time and fixed final
pressure compression ratio.
The compression work during compression from 𝑡 = 0 to
𝑡 = 𝑡𝑓 is given by
comp = ∫ (𝑃 + 𝑃r)𝑈0𝐴dt𝑡𝑓0
(28)
This is the objective function that must be minimized. The
compression work is done to pump the liquid piston against the
thermodynamic pressure of air, 𝑃, and the flow resistance of the
porous insert, 𝑃r.
The instantaneous thermodynamic pressure of the air in the
chamber is given by,
𝑃 =1
𝐿∫ 𝛼1𝑅𝑇𝑑𝑥𝐿
0 (29)
The instantaneous air volume fraction and fluid temperature are
variables that can be obtained by solving the One-D model.
A general formulation of the flow resistance due to the
porous medium is based on Darcian and Forchheimer terms:
𝑃𝑟 = ∫ [𝜇
𝐾𝜖𝑢 +
1
2𝜌𝑏(𝜖𝑢)2] 𝑑𝑥
𝐿
0
(30)
Note that in this problem the VOF method is used, and 𝜌 and 𝜇
are the fluid mixture properties given by Eqns. (15) and (16). A
measurement taken in [12] showed that the following
parameters of Eq. (30) are suitable for a 93% porous metal foam
with 10 pores per inch (10 ppi):
= 2. 97 × 10−7 2, 𝑏 = 70.1 ⁄
Equation (30) does not account for the effect of porosity on the
flow resistance. Ergun proposed a term, (1−𝜖)2
𝜖3 , multiplied to
the Darcian velocity in the Darcian resistance term, and a term, 1−𝜖
𝜖3 , multiplied to the Darcian velocity squared in the
Forchheimer resistance term [31]. Therefore, considering
Ergun’s equation and the resistance parameters obtained in [12],
the following equation will be used to account for the effect of
porosity on flow resistance,
𝑃𝑟 = ∫ [𝜇
𝐾
(1−𝜖)2
𝜖3𝜖𝑢 +
1
2𝜌��
1−𝜖
𝜖3(𝜖𝑢)2] 𝑑𝑥
𝐿
0
(31)
where, = 1. 60 × 10−9 2, �� = 6 0.
After compression, the compressed air cools to the initial
temperature; cooling work is done to decrease its volume while
maintaining its pressure. This cooling work has been addressed
in [5], [6] and [26]. It is given by:
cool = (𝑃𝑓 − 𝑃0)(𝑉𝑓 − 𝑉0𝑃0
𝑃𝑓) (32)
In sum, the objective of optimization is to minimize the
total work input, which is the sum of compression work and
cooling work:
in = ∫ {1
𝐿∫ 𝛼1𝜌1𝑅𝑇𝑑𝑥𝐿
0+∫ [
𝜇
𝐾
(1−𝜖)2
𝜖3𝜖𝑢 +
𝐿
0
𝑡𝑓
0
1
2𝜌��
1−𝜖
𝜖3(𝜖𝑢)2] 𝑑𝑥}𝑈0𝐴dt + (𝑃𝑓 − 𝑃0)(𝑉𝑓 −
𝑉0
𝜁) ,
(33)
subject to,
𝑃𝑓
𝑃0= 𝜁∗
0.7 ≤ 𝜖 ≤ 0.96
The pressure, temperature, and volume fraction are obtained by
solving the One-D model.
3.2. Optimization Method
The optimization method features an iterative procedure
that involves evaluating the sensitivity of local change of 𝜖(𝑥) and optimizing 𝜖(𝑥) accordingly. First, an initial porosity

7 Copyright © 2013 by ASME
distribution, 𝜖(𝑥)[0] is assigned. The total work input is
calculated based Eq. (33), after solving the transient flow
variables from the One-D model. Then, the local sensitivity,
which is the partial derivative of compression work with respect
to local porosity, is evaluated at each optimization node
according to:
(𝜕𝑊𝑖𝑛
𝜕𝜖(𝑥𝑙))[𝑖]= (
𝑊𝑖𝑛,𝑙∗−𝑊𝑖𝑛
𝛥𝜖)[𝑖]
(34)
where subscripts 𝑙 and [𝑖] represent local node index and
iteration step, respectively. The work in is evaluated based on
the current porosity distribution, 𝜖(𝑥) , obtained after the
previous optimization round. The term in,𝑙∗ is evaluated
based on the porosity distribution, 𝜖∗(𝑥), which has a small
change, Δϵ, at location 𝑥𝑙:
𝜖∗(𝑥𝓃)[𝑖] = {𝜖(𝑥𝓃)[𝑖] + 𝛥𝜖, 𝓃 = 𝑙
𝜖(𝑥𝓃)[𝑖], 𝑛 ≠ 𝑙 𝓃 = 1,2, … , 𝑁 (35)
where 𝑁 is the total number of optimization nodes along the
axis of the chamber. Evaluating the sensitivity at each node 𝑙 requires solving the One-D model based on the porosity
distribution, 𝜖∗(𝑥𝓃). After calculations of sensitivity values at
all nodes are completed, the porosity distribution is updated in
the direction that decreases the compression work based on the
local sensitivity values. Since larger local sensitivity values
indicate larger gains when optimizing the local porosity, the
optimization scheme increases or decreases the local porosity
values by an amount proportional to the local sensitivity value.
The local porosity values are updated based on:
𝜖(𝑥𝑙)[𝑖+1] =
{
0.7, 𝑖𝑓 𝜖(𝑥𝑙)[𝑖] − 𝛾Δϵ (
𝜕 in
𝜕𝜖(𝑥𝑙))[𝑖]
< 0.7
0.96, 𝑖𝑓 𝜖(𝑥𝑙)[𝑖] − 𝛾Δϵ (𝜕 in
𝜕𝜖(𝑥𝑙))[𝑖]
> 0.96
𝜖(𝑥𝑙)[𝑖] − 𝛾Δϵ (𝜕 in
𝜕𝜖(𝑥𝑙))[𝑖]
, 𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒
𝑙 = 1, 2, … , 𝑁 (36)
where 𝛾 is a parameter to control the convergence rate of
optimization.
Because the compression time is fixed, as the porosity
distribution is updated, the final pressure ratio would be
different if the same compression speed were used. Therefore
the compression speed must be updated to maintain the same
pressure compression ratio. The objective of updating the
compression speed is to minimize the pressure ratio error:
𝑃𝑒𝑟𝑟 = |𝜁 − ζ𝑑𝑒𝑠𝑖𝑟𝑒| (37)
The sensitivity of the compression speed to the pressure ratio
error is calculated by:
(𝜕𝑃𝑒𝑟𝑟
𝜕𝑈0)[𝑖]= (
𝑃𝑒𝑟𝑟∗−𝑃𝑒𝑟𝑟
𝛥𝑈0)[𝑖]
(38)
where 𝑃𝑒𝑟𝑟∗ is the solution obtained for the compression speed:
𝑈0 + 𝛥𝑈0 . The compression speed is then updated based on its
sensitivity:
𝑈0[𝑖+1] = 𝑈0[𝑖] −𝑃𝑒𝑟𝑟[𝑖]
(𝜕𝑃𝑒𝑟𝑟𝜕𝑈0
)[𝑖]
(39)
The aforementioned calculations are performed repeatedly until
a final and optimum 𝜖(𝑥) is found.
3.3. Optimization Solution
An optimization problem is solved to find an optimal
porosity distribution, 𝜖(𝑥) , that minimizes the compression
work, in , for a given compression time and liquid piston
speed. The porosity value is bound by [0.7, 0.96]. The chamber
length and compression speed are given in Table 1. The same
initial conditions and physical properties as in the problem in
Section 2 are used here. The compression time is 2.6s. The final
compression ratio is fixed at 12.94, and the power density is
6 ,020 3 (storage energy density: 166, 3). The
initial porosity distribution is 0.93 throughout the chamber.
Since One-D modeling does not include radial direction effects,
the result on the work input is given on a “per volume” basis.
The domain is discretized into 50 optimization nodes (𝑁 = 0)
and 3500 computation nodes (𝑁𝑛 = 00) for the One-D model.
The time step size for solving the One-D model is ∆𝑡 =2.167 × 10−5𝑠. The optimization parameter, 𝛾, increases with
iteration step to accelerate the convergence speed for the first
five optimization steps, and is maintained at a relatively small
value for the sixth optimization step:
𝛾 =𝑖
50 (40)
where 𝑖 is the optimization step.
The optimization procedure starts with 𝑖 = 0. After three
optimization rounds, at step 𝑖 = , the solution is considered to
be optimal and further optimization would result in a change of
less than 1 3 of work input, in. The work input values at
every optimization step are shown in Fig. 7 (a). The initial work
input is 18 ,22 3. After optimization, the work input is
182,09 3. The initial compression speed is 0.10 0 𝑠.
The compression speed for the optimal porosity distribution is
0.10 1 𝑠. The efficiency, which is the storage energy divided
by the work input, is improved from 90.79% to 91.41% by
optimization.
The porosity distributions at different optimization steps are
shown in Fig. 7 (b). The optimal porosity distribution, which is
obtained at step 3, features high porosity values in
approximately the first half of the chamber, low porosity values
in a region close to the top cap, and a smooth transition region
between the two regions. The physical reason for this
optimization result is that high porosity values in the lower
region of the chamber can more effectively reduce the pressure
drag of the porous inserts, while low porosity values in the
upper region can more effectively enhance heat transfer.
The sensitivity curves at different optimization steps are
shown in Fig. 7 (c). Note that the work input sensitivity is based
on the absolute work value for on a unity radius of the air

8 Copyright © 2013 by ASME
volume. In general, the sensitivity becomes smaller as
optimization proceeds. By comparing the sensitivity curve to the
porosity distribution at step 3, one sees that optimal solution is
achieved at step 3. The local sensitivity values in the
large-porosity region are negative, meaning that further
optimization in this region is possible only if the porosity values
are allowed to be increased beyond the upper bound. The local
sensitivity values in the upper, low-porosity region are positive,
meaning that further optimization in this region is possible only
if the porosity values were allowed to be decreased below the
lower bound. In the transition region between the high and low
porosity regions, the local sensitivity values are almost all zero,
meaning that optimal values have already been achieved in this
region.
(a) Compression work values at different optimization steps
(b) Porosity distributions at different optimization steps
(c) Sensitivity distributions at different optimization steps
Fig.7. Solutions obtained through optimization iterations
The optimal porosity distribution is shown in Fig. 8. The
porosity distribution in the transition region between the high
and low porosity regions is fit into a polynomial. In summary,
the optimal porosity distribution for this problem is:
𝜖 = 0.96, for 𝑥 < 0. 20𝐿
𝜖 = −22.610 (𝑥
𝐿)3
+ 2.867 (𝑥
𝐿)2
− 27. 9 𝑥
𝐿+ 6.79
for 0. 20𝐿 ≤ 𝑥 ≤ 0.816𝐿
𝜖 = 0.7 for 𝑥 > 0.816𝐿
Fig. 8. Optimal porosity distribution along the chamber axis
4. CONCLUSIONS A One-D numerical model for a liquid-piston compressor
with porous inserts is developed. The VOF method used in the
modeling is able to track the instantaneous liquid-gas interface
(liquid-piston surface). The model allows one to quickly and
accurately solve for transient temperature distributions in the
fluid and solid along the chamber axis. The solutions of the
One-D model have been validated against CFD simulation
results on a two-dimensional, axisymmetric domain.
An optimization problem is solved using the One-D model.
The objective is to find an optimal distribution of porosity along
the chamber axis to minimize compression work for a given
compression time and final pressure ratio. The optimization
method calculates local sensitivity values, and optimizes
accordingly, in an iterative manner. The optimization results
show that high-porosity medium is favored in the lower part of
the chamber to reduce drag, while low-porosity medium is
favored in a region next to the top cap of the chamber to
enhance heat transfer, and a transition region between the high
and low porosity values has a porosity distribution following a
polynomial curve.
NOMENCLATURE
𝐴 Cross-sectional area of the chamber
𝑏 Coefficient for the Forchheimer term
𝑐𝑝 Constant-pressure specific heat
𝑐 Constant-volume specific heat
𝐷𝑝 Mean pore diameter
𝑠 Storage energy
Gravitational acceleration
ℎ𝑉 Volumetric heat transfer coefficient
Permeability

9 Copyright © 2013 by ASME
𝑘 Thermal conductivity
𝐿 Chamber length
𝑁 Number of optimization nodes
𝑁𝑛 Number of computation nodes of One-D model
𝑁𝑢𝑉 Nusselt number based on ℎ𝑉
𝑃 Average thermodynamic pressure of air
𝑃𝑒𝑟𝑟 Difference between the pressure ratio and the
desired pressure ratio
𝑃𝑟 Pressure resistance of the porous inserts
𝑃𝑒𝑟𝑟∗ Difference between the pressure ratio and the
desired pressure ratio for the sensitivity evaluation
𝑃𝑜𝑤 Power density
𝑝 Local pressure
𝑃𝑟 Prandtl number
𝑅 Ideal gas constant
𝑇 Local fluid mixture temperature
𝑇0 Initial temperature; wall temperature
𝑇 Local solid temperature
𝑡 Time
𝑈0 Liquid piston velocity
𝑢 Local velocity of fluid mixture
in Compression work
𝑥 Axial coordinate
𝑥𝑝
Instantaneous location of liquid piston surface
Greek Symbols
𝛼 Volume fraction
𝛾 An optimization control parameter
𝜖 Porosity
𝜖∗ Porosity distribution for the sensitivity analysis
ζ Air pressure ratio
ζ𝑑𝑒𝑠𝑖𝑟𝑒 Desired air pressure ratio
ζ∗ Air pressure ratio for the sensitivity analysis
𝜇 Dynamic viscosity
𝜌 Density
Subscripts
0 Initial value of variable
1 Air phase
2 Water phase
𝑓 Values at the end of compression
𝑖 Optimization step
Computation node index of the One-D model
𝑙 Optimization node index
𝓃 Optimization node index
𝑠 Solid
ACKNOWLEDGEMENTS This work is supported by the National Science Foundation
under grant NSF-EFRI #1038294, and University of Minnesota,
Institute for Renewable Energy and Environment (IREE) under
grant: RS-0027-11. The authors would like to thank also the
Minnesota SuperComputing Institute for the computational
resources used in this work.
REFERENCE 1. P. Sullivan, W. Short, and N. Blari, “Modeling the Benefits
of Storage Technologies to Wind Power,” American Wind
Energy Association (AWEA) WindPower 2008 Conference,
Houston, Texas, June, 2008
2. P. Y Li, J. Van de Ven, and C. Shancken, “Open
Accumulator Concept for Compact Fluid Power Energy
Storage,” Proceedings of ASME 2007 International
Mechanical Engineering Congress and Exposition, Seattle,
WA, Nov. 2007
3. M. Nakhamkin, M. Chiruvolu, M. Patel, S. Byrd, R.
Schainker, “Second Generation of CAES Technology –
Performance, Operations, Economics, Renewable Load
Management, Green Energy,” POWER_GEN International
Conference, Vas Vegas, NV, Dec. 2009
4. P. Y. Li, E. Loth, T. W. Simon, J. D. Van de Ven, and S. E.
Crane, “Compressed Air Energy Storage for Offshore Wind
Turbines,” 2011 International Fluid Power Exhibition
(IFPE), Las Vegas, NV, March, 2011
5. A. T. Rice, “Heat Transfer Enhancement in a Cylindrical
Compression Chamber by Way of Porous Inserts and
Optimization of Compression and Expansion Trajectories
for Varying Heat Transfer Capabilities,” M. S. Thesis,
University of Minnesota, 2011
6. C. Zhang, T. W. Simon, P. Y. Li, “Storage Power and
Efficiency Analysis Based on CFD for Air Compressors
Used for Compressed Air Energy Storage,” Proceedings of
ASME 2012 International Mechanical Engineering
Congress & Exposition, Houston, TX, Nov. 2012
7. J. Van de Ven and P. Y. Li, “Liquid Piston Gas
Compression,” Applied Energy, v. 86, n. 10, pp. 2183-2191,
2009
8. E. Sozer and W. Shyy, “Modeling of Fluid Dynamics and
Heat Transfer through Porous Media for Liquid Rocket
Propulsion,” Transactions of the 43rd
AIAA/ASME/SAE/ASEE Joint Propulsion Conference &
Exhibit, July 2007
9. N. Zahi, A. Boughamoura, H. Dhahri, and S Ben Nasrallah,
“Flow and Heat Transfer in a Cylinder with a Porous Insert
along the Compression Stroke,” Journal of Porous Media,
Vol. 11 (6), pp. 525-540, 2008
10. Y. P. Du, Z. G. Qu, C. Y. Zhao, and W. Q. Tao, “Numerical
Study of Conjugated Heat Transfer in Metal Foam Filled
Double-Pipe,” Int. J. Heat Mass Transfer, Vol. 53, pp.
4899-4907, 2010
11. C. Xu, Z. Song, L. Chen, Y. Zhen, “Numerical Investigation
on Porous Media Heat Transfer in a Solar Tower Receiver,”
Renewable Energy, Vol. 36, pp. 1138-1144, 2011.
12. C. Zhang, J. Wieberdink, F. A. Shirazi, B., Yan,T. W. Simon,
and P. Y. Li, “Numerical Investigation of Metal-Foam Filled
Liquid-Piston Compression Chamber Using a Two-Energy
Equation Model Based on Experimentally Validated
Models,” To Appear: Proceedings of 2013 ASME
International Mechanical Engineering Congress and
Exposition, San Diego, CA, Nov. 2013
13. A. J. Willmott, “Digital Computer Simulation of a Thermal
Regenerator,” Int. J. Heat Mass Transfer, Vol. 7, pp.
1291-1302, 1964
14. F. W. Larsen, “Rapid Calculation of Temperature in a
10 Copyright © 2013 by ASME
Regenerative Heat Exchanger Having Arbitrary Initial Solid
and Entering Fluid Temperatures,” Int. J. Heat Mass
Transfer, Vol. 10, pp. 149-168, 1967
15. A. J. Willmott, “Simulation of a Thermal Regenerator under
Conditions of Variable Mass Flow,” Int. J. Heat Mass
Transfer, Vol. 11, pp. 1105-1116, 1968
16. P. Razelos, and M. K. Benjamin, “Computer Model of
Thermal Regenerators with Variable Mass Flow Rates,” Int.
J. Heat Mass Transfer, Vol. 21, pp. 735-743, 1978
17. H Kwakernaak, R. C. W. Strijbos, and P. Tijssen, “Optimal
Operation of Thermal Regenerators,” IEEE Transactions of
Automatic Control, Dec. 1969
18. A. J. Willmott, C. Hinchcliffe, “The Effect of Gas Heat
Storage upon the Performance of the Thermal Regenerator,”
Int. J. Heat Mass Transfer, Vol. 19, pp. 821-826, 1976
19. A. Burns, “Heat Transfer Coefficient Correlations for
Thermal Regenerator Calculations – Transient Response,”
Int. J. Heat Mass Transfer, Vol. 22, pp. 969-973, 1979
20. A. Hill, and A. J. Willmott, “Accurate and Rapid Thermal
Regenerator Calculations,” Int. J. Heat Mass Transfer, Vol.
32, No. 3, pp. 465-476, 1989
21. A. J. Willmott, B. Kulakowski, “Numerical Acceleration of
Thermal Regenerator Simulations,” International Journal
for Numerical Methods in Engineering, Vol. 11, pp.
533-551, 1977
22. A. Hill, and A. J. Willmott, “A Robust Method for
Regenerative Heat Exchanger Calculations,” Int. J. Heat
Mass Transfer, Vol. 30, No. 2, pp. 241-249, 1987
23. J. W. Howse, G. A. Hansen, D. J. Cagliostro, and K. R.
Muske, “Solving a Thermal Regenerator Model Using
Implicit Newton-Krylov Methods,” Numerical Heat
Transfer, Part A, 38: 23-44, 2000
24. H. Klein, and G. Eigenberger, “Approximate Solutions for
Metallic Regenerative Heat Exchangers,” Int. J. Heat Mass
Transfer, Vol. 44, pp. 3553-3563, 2001
25. C. Zhang, M. Saadat, P. Y. Li, and T. W. Simon, “Heat
Transfer in a Long, Thin Tube Section of an Air
Compressor: An Empirical Correlation from CFD and a
Thermodynamic Modeling,” Proceedings of ASME 2012
International Mechanical Engineering Congress &
Exposition, Houston, TX, Nov. 2012
26. C. Zhang, F. A. Shirazi, B. Yan, T. W. Simon, P. Y. Li, and J.
Van de Ven, “Design of an Interrupted-Plate Heat
Exchanger Used in a Liquid-Piston Compression Chamber
for Compressed Air Energy Storage,” To Appear:
Proceedings of ASME 2013 Summer Heat Transfer
Conference, Minneapolis, MN, July 2013
27. C. W. Hirt, and B. D. Nichols, “Volume of Fluid (VOF)
Method for Dynamics of Free Boundaries,” Journal of
Computational Physics, vol. 39, pp. 201-225, 1981
28. K. Kamiuto and S. S. Yee, “Heat Transfer Correlations for
Open-Cell Porous Materials,” International
Communications in Heat and Mass Transfer, Vol. 32, pp.
947-953, 2005
29. A. Nakayama, K. Ando, C. Yang, Y. Sano, F. Kuwahara,
and J. Liu, “A Study on the Interstitial Heat Transfer in
Consolidated an Unconsolidated Porous Media,” Heat and
Mass Transfer, Vol. 45, No. 11, pp. 1365-1372, 2009
30. “Air Properties,” <URL:
http://www.engineeringtoolbox.com/air-properties-d_156.ht
ml>, (Accessed Apr. 2013)
31. S. Ergun, “Fluid Flow through Packed Columns,” Chem.
Eng. Prog., vol. 48, pp. 89-94, 1952