oedm: optimizacion estocastica dinamica … · de coordinación también se denominan variables de...
TRANSCRIPT

OEDM:
OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
-TEORIA GENERAL-
DOCUMENTO DE TRABAJO - DW-DT-033
(REVISIÓN 2003)
PUBLICADO INICIALMENTE EN LA REVISTA ENERGÉTICA No. 13 (1995)
Jesús María Velásquez Bermúdez
DecisionWare Ltda., Colombia

OEDM:
OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
-TEORIA GENERAL-
Ing. JESÚS M. VELÁSQUEZ BERMÚDEZ
...“Me podrías indicar, por favor, hacia dónde tengo que ir desde aquí ? “
“Eso depende de a dónde quieras llegar”, contestó el Gato.
“A mí no me importa demasiado a dónde ... “, empezó a explicar Alicia.
“En ese caso, da igual hacia dónde vayas”, interrumpió el Gato.
“... siempre que llegue a alguna parte”, terminó Alicia a modo de explicación.
“Oh! siempre llegarás a alguna parte”, dijo el Gato, “si caminas lo bastante”.
Lewis Carroll
Alicia en el País de la Maravillas
RESUMEN
Este artículo presenta los resultados teóricos de las técnicas dela aplicación de la Teoría de J. F.
Benders a la solución de problemas dinámicos estocásticos.
1. GENERALIZACION DE LA TEORIA DE J.F. BENDERS
En 1962, J.F. Benders [1] publicó su teoría orientada a la optimización de problemas de gran escala. La idea
fundamental es la partición de un problema de gran tamaño en dos subproblemas de menor complejidad con base en la
clasifican las variables como de coordinación y como subordinadas, o dependientes. La solución del problema original
se obtiene por medio de la solución coordinada de dos subproblemas complementarios en los cuales se independizan
las variables: para las variables de coordinación se formula un problema coordinador, y para las variables
subordinadas un problema dependiente, o primario. El problema primario aporta información al coordinador por
medio de las variables duales asociadas a sus restricciones. En el coordinador se toma la información proveniente del
nivel primario y la incorpora en forma de planos cortantes -cortes de Benders- que limitan la zona de factibilidad para
la solución óptima de las variables de coordinación. Los cortes de Benders sirven para evaluar indirectamente los
costos de las variables subordinadas como función de las variables de coordinación. El algoritmo definido por Benders
es convergente y soluciona el problema original a través de la solución del modelo coordinador.
Este artículo presenta la generalización de la teoría de Benders para varios casos típicos en que la estructura del
problema de optimización permite la utilización eficaz de los principios propuestos por Benders. Los casos analizados
son:
a) Teoría de descomposición: es útil cuando es posible agrupar las variables subordinadas en conjuntos
independientes con la finalidad de formular múltiples subproblemas subordinados. En este caso las variables
de coordinación también se denominan variables de acople.
b) Teoría multinivel: se utiliza cuando existe una estructura multinivel de relaciones jerárquicas dentro de las
variables que integran el problema, y es posible al interior de las variables subordinadas seleccionar un
nuevo conjunto de variables de coordinación para establecer un nivel adicional de partición.
c) Teoría de descomposición multinivel: es el resultado de la combinación de las dos teorías anteriores.
d) Teoría dinámica: cuando el sistema objeto de la optimización presenta una estructura dinámica temporal, es
posible combinar la teoría de Benders con los principios de programación dinámica.
e) Teoría de descomposición dinámica multinivel: es el resultado de la combinación de la teoría dinámica con
la teoría de descomposición multinivel.
f) Teoría estocástica: cuando se formulan modelos de optimización estocástica. En muchos casos, la estructura

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
de los problemas permite utilizar las teorías de descomposición multinivel para aumentar la eficacia del
proceso de solución, y para caracterizar la estructura probabilística de la solución.
g) Teoría estocástica dinámica multinivel: es el resultado de la combinación de todos los casos estudiados.
2. TEORIA DE PARTICION DE BENDERS
Para el desarrollo de la teoría de Benders consideremos el problema de optimización P: compuesto por variables Y,
correspondientes a las variables de coordinación, y variables X, correspondientes a las coordinadas.
P: = { Min Z = CTX + f(Y) |
F0(Y) = b0 ; AX + F(Y) = b ; XR+ ; YS }
La teoría de Benders restringe el modelo sobre X a un problema lineal, en tanto que es flexible con respecto a Y. El
espacio S de existencia de Y puede ser continuo o discreto, lo que permite que las componentes de Y sean variables
continuas, enteras y/o binarias. Adicionalmente, las funciones asociadas a Y pueden ser no-lineales.
El problema P: puede partirse en dos subproblemas uno sobre Y y otro sobre X. Si se define Q(Y) como el valor óptimo
de la función objetivo correspondiente al problema sobre X para un valor dado de Y:
Q(Y) = {Min CTX | AX = b - F(Y); XR+ }
es posible formular un problema equivalente CY:
CY: = { Min Z = f(Y) + Q(Y) |
F0(Y) = b0 ; YS ;
Q(Y) = {Min CTX | AX = b - F(Y) ; XR+ } }
El subproblema SP(Y): para evaluar Q(Y) es
SP(Y): = {Min Q(Y) = CTX | AX = b - F(Y) ; XR+ }
y el problema dual de SP(Y):
DSP(Y): = {Max W(Y) = T[b - F(Y)] | TA CT }
donde corresponde al vector de variables duales de las restricciones AX=b-F(Y). Con base en la teoría de la
dualidad se sabe que la función objetivo del problema dual, W(Y), es menor o igual a la función objetivo del primal,
Q(Y), para cualquier valor factible de
Q(Y) T [b - F(Y)]
cumpliéndose la igualdad solo para el valor óptimo *, que es un punto extremo de la zona de factibilidad dual. Dado
que la zona de factibilidad de es independiente de Y, la anterior condición debe cumplirse para todo Y, y CY: puede
escribirse como
CY: = { Min Z = f(Y) + Q(Y) |
F0(Y) = b0 ; YS ;
Q(Y) T [b - F(Y)] ;
TA CT }

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
Si se conocen todos los puntos extremos , es posible obviar la formulación explícita de las restricciones TA CT. CY:
puede formularse como
CY: = { Min Z = f(Y) + Q(Y) |
F0 (Y) = b0 ; YS ;
Q(Y) (k)T [b - F(Y)] , kNP }
donde NP representa el conjunto de todos los puntos extremos del problema dual DSP(Y):.
Dado que para problemas reales el número de puntos extremos NP y tiende a infinito, el algoritmo propuesto por
Benders se concentra en definir un método eficaz para la generación de valores extremos k de forma tal que, con un
número finito de ellos, se obtenga la solución a CY: que es equivalente a P:. Si se soluciona SP(Y): para diferentes
valores de Y, se generarán valores factibles de , y es posible implementar un método de generación de planos
cortantes en CY:.
Benders propone la solución de P: por medio de un algoritmo que trabaja en dos niveles: en el nivel superior, nivel de
coordinación, se resuelve el problema coordinador CY: que genera una secuencia de valores Yk. En el nivel inferior,
los valores Yk son utilizados como parámetros del subproblema SP(Y): para generar una secuencia de puntos factibles
k, que se utilizan en el nivel superior para incluir en CY: un plano cortante que restringe la zona de optimalidad de Y.
SP(Yk): puede tener tres posibles soluciones: no acotada, factible y óptima, y no factible. En caso de solución no
acotada en SP(Yk): se puede concluir que P: también tiene solución no acotada. En caso de solución factible y óptima,
SP(Yk): proporciona un punto extremo a la zona de factibilidad dual, TAc, y se genera un corte en la zona de
factibilidad de Y por razones de optimalidad, es decir se eliminan valores de Y que no pueden ser óptimos. Este corte
tiene la forma
Q(Y) (k)T[b-F(Y)]
En caso de que no exista solución factible a SP(Yk): se debe generar el anterior corte, ya que, en un tablero simplex,
asociada a una solución no factible en el primal, existe una solución factible en el dual. Adicionalmente, se debe incluir
un corte por razones de la relación entre la zona de factibilidad de Y y la zona de factibilidad de X. De acuerdo con el
Lema de Farkas [2], para garantizar la factibilidad de X en SP(Yk) se debe satisfacer
0 VT[b - F(Yk)]
donde V es un rayo extremo de la región de factibilidad de . Al no existir factibilidad, la anterior condición no se
cumple automáticamente y por lo tanto se debe incluir explícitamente en el modelo coordinador CY:. En cada ciclo del
modelo coordinador se debe resolver
CY: = { Min Z = f(Y) + Q(Y) |
F0(Y) = b0 ;
Q(Y) (k)T[b - F(Y)] , k=1,ITE ;
0 (Vk)T[b - F(Y)] , k1,ITN }
donde ITE representa todas las iteraciones realizadas, e ITN el conjunto de las iteraciones en que no se ha conseguido
la factibilidad.
La convergencia del método propuesto por Benders se obtiene cuando dos valores consecutivos Yk y Yk+1 son iguales,
debido a que el último corte no proporciona información adicional. Existen otros mecanismos para detener el proceso,
OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
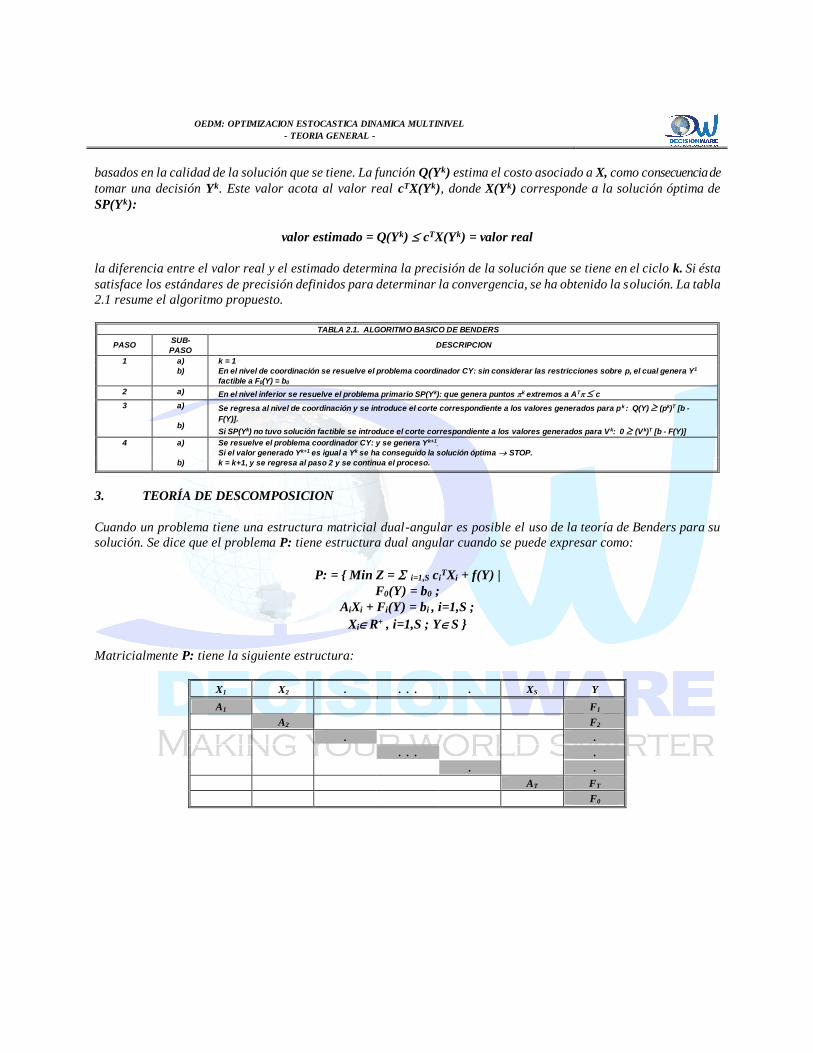
basados en la calidad de la solución que se tiene. La función Q(Yk) estima el costo asociado a X, como consecuencia de
tomar una decisión Yk. Este valor acota al valor real cTX(Yk), donde X(Yk) corresponde a la solución óptima de
SP(Yk):
valor estimado = Q(Yk) cTX(Yk) = valor real
la diferencia entre el valor real y el estimado determina la precisión de la solución que se tiene en el ciclo k. Si ésta
satisface los estándares de precisión definidos para determinar la convergencia, se ha obtenido la solución. La tabla
2.1 resume el algoritmo propuesto.
TABLA 2.1. ALGORITMO BASICO DE BENDERS
PASO SUB-
PASO DESCRIPCION
1 a) k = 1
b) En el nivel de coordinación se resuelve el problema coordinador CY: sin considerar las restricciones sobre p, el cual genera Y1
factible a F0(Y) = b0 2 a) En el nivel inferior se resuelve el problema primario SP(Yk): que genera puntos k extremos a AT c 3 a)
b)
Se regresa al nivel de coordinación y se introduce el corte correspondiente a los valores generados para pk : Q(Y) (pk)T [b -
F(Y)].
Si SP(Yk) no tuvo solución factible se introduce el corte correspondiente a los valores generados para Vk: 0 (Vk)T [b - F(Y)] 4 a) Se resuelve el problema coordinador CY: y se genera Yk+1
.
Si el valor generado Yk+1 es igual a Yk se ha conseguido la solución óptima STOP.
b) k = k+1, y se regresa al paso 2 y se continua el proceso.
3. TEORÍA DE DESCOMPOSICION
Cuando un problema tiene una estructura matricial dual-angular es posible el uso de la teoría de Benders para su
solución. Se dice que el problema P: tiene estructura dual angular cuando se puede expresar como:
P: = { Min Z = i=1,S ciTXi + f(Y) |
F0(Y) = b0 ;
AiXi + Fi(Y) = bi , i=1,S ;
XiR+ , i=1,S ; YS }
Matricialmente P: tiene la siguiente estructura:
X1 X2 . . . . . XS Y
A1 F1
A2 F2
. .
. . . .
. .
AT FT
F0

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
El subíndice i esta asociado a un área de influencia relacionada con sectores industriales, zonas geográficas, períodos,
y/o realizaciones de un proceso estocástico, Y está asociada al consumo/producción de recursos comunes, y/o a la
transferencia de recursos entre áreas de acción, y Xi a la operación dentro del área de acción del subíndice i.
P: puede resolverse utilizando la teoría de Benders directamente. Y corresponde a las variables de coordinación, y Xi a
las variables coordinadas. Sin embargo, se puede tomar ventaja de la estructura de P: con la finalidad de diseñar un
algoritmo mas eficaz que el resultante de aplicar directamente la teoría de Benders.
Definamos Q(Y) como el valor óptimo de la función objetivo correspondiente al problema sobre las variables Xi para
un valor dado de Y
Q(Y) = {Min i=1,S ciTXi | AiXi = bi - BiY, i=1,S ; XiR+ , i=1,S }
Utilizando directamente la teoría de Benders el problema coordinador es
CY: = { Min Z = f(Y) + Q(Y) |
F0(Y) = b0 ; YS ;
Q(Y) i=1,S (ik)T[bi - Fi(Y)] , k=1,ITE ;
0 i=1,S (Vik)T[b - F(Y)] , k=1,ITN }
donde i representa las variables duales del i-ésimo conjunto de restricciones y Vi a los rayos extremos de las
soluciones no factibles. El subproblema asociado integra todas las Xi.
Es posible desacoplar el subproblema primario al formular la función Q(Y) como la suma de S funciones Qi(Y) cada
una de ellas correspondiente a un subproblema sobre Xi
Qi(Y) = {Min ciTXi | AiXi = bi - Fi(Y), XiR+ }
cumpliéndose
Q(Y) = i=1,S Qi(Y)
El problema SPi(Y) para evaluar Qi(Y) se formula como
SPi(Y): = {Min Qi(Y) = ciTXi | AiXi = bi - Fi(Y); XiR+ }
y su problema dual
DSPi(Y): = {Max Wi(Y) = iT [bi - Fi(Y)] | i
TAiT ci
T }
Como en el caso anterior, con base en la teoría de la dualidad se sabe que
Qi(Y) iT [bi - Fi(Y)]
cumpliéndose la igualdad solo para el valor óptimo i*. La zona de factibilidad de i es independiente de Y y la
anterior condición se debe cumplir para todo Y. El modelo coordinador CY: se formula como
CY: = { Min Z = f(Y) + Q(Y) |
F0(Y) = b0 ; YS ;

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
Q(Y) = i=1,S Qi(Y)
Qi(Y) (ik)T[bi - Fi(Y)] , i=1,S, k=1,ITE(i) ;
0 (Vik)T[bi - Fi(Y)] , i=1,S, k1,ITN(i) }
donde ITE(i) define el conjunto de las iteraciones realizadas para el subproblema i, e ITN(i) el de las iteraciones en
que no se ha conseguido la factibilidad.
Las ventajas del enfoque de descomposición son:
a) la formulación original no considera la posibilidad de descomposición asumiendo un problema integrado para
las Xi. Bajo el esquema de descomposición en el nivel inferior se resuelve un subproblema por cada elemento
asociado al subíndice i.
b) en el esquema original se genera un solo corte por cada iteración que integra las variables duales
provenientes de todos los subproblemas. En la formulación propuesta se generan S cortes, uno por cada
SPi(Y): y se acoplan por medio de la ecuación que define a Q(Y). La diferencia es que un solo corte actúa
acotando el máximo de una suma, en tanto que S cortes actúan acotando la suma de los máximos, que es una
condición más exigente;
c) al desacoplarse el sistema, la información aportada por cada subproblema es independiente de los demás y no
existe una razón que obligue en una iteración, entre coordinador y subproblemas, a resolver todos los
subproblemas. Esta característica permite implementar esquemas de solución que solo resuelvan aquellos
subproblemas que aportan "más información".
4. TEORÍA MULTINIVEL
Existen problemas en los cuales se puede definir jerárquicamente más de un nivel de coordinación. Vale decir, que al
interior de un conjunto de variables subordinadas existe una relación tal que, unas funcionan como coordinadoras de
las demás. Para facilidad de la presentación de la teoría primero se analizará un caso de tres niveles y posteriormente
se generalizará para S niveles.
En el desarrollo de esta teoría, y en el de las siguientes, solo se presentan los procedimientos relativos a los cortes que
se generan para limitar la zona de factibilidad de Y por razones de optimalidad.
4.1. CASO DE TRES NIVELES
Consideremos el problema P: el cual puede ser particionado en tres niveles jerárquicos
P: = { Min cTX + eTZ + f(Y) |
F0(Y) = b0 ;
GZZ + FZ(Y) = bZ ;
AX + GZ +F(Y) = b ;
XR+ ; ZR+ ; YSdonde Y corresponde a las variables de coordinación general, y Z y X a las variables
coordinadas por Y; a su vez, Z actúa como coordinadora de X, una vez se ha definido el valor de Y. Si se aplica
directamente la teoría desarrollada por Benders, el modelo coordinador sobre Y es
CY: = { Min Z = Q(Y) + f(Y) |
F0(Y) = b0 ; YS ;
Q(Y) (Xk)T(b - F(Y)) + (Z
k)T(bZ - FZ(Y)) , K=1,ITE }
donde X corresponde al vector de variables duales del conjunto de restricciones AX+GZ=b-F(Y), Z al vector de
variables duales del conjunto de restricciones GZZ=bZ-FZ(Y), e ITE al número de cortes que se han generado a partir
del nivel inferior.

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
Q(Y) esta compuesta por la suma de dos funciones QX(Y) que estima el valor del costo cTX(Y), y QZ(Y) para el costo de
eTZ(Y).
QX(Y) = (X )T(b - F(Y))
QZ(Y) = (Z)T(bZ - FZ(Y))
Consideremos el subproblema coordinado por Y para {X,Z} que aporta valores factibles para X y Z
SP1(Y) = { Min Q(Y) = cTX + eTZ |
GZZ = bZ FZ(Y) ;
AX + GZ = b - F(Y) ;
XR+ ; ZR+ }
El dual de SP1(Y): es
DSP1(Y) = { Max XT(b - F(Y)) +Z
T(bZ - FZ(Y)) |
XTA cT ;
XTG + Z
TGX eT }
Dado que Z coordina a X es posible resolver SP1(Y): utilizando nuevamente la teoría de Benders. Consideremos el
problema coordinador sobre Z condicionado en un valor de Y
CZ(Y): = { Min eTZ + W(Z|Y) |
GZZ = bZ - FZ(Y) ; ZR+ ;
W(Z|Y) = {Min cTX | AX = b - F(Y) - GZ ; XR+} }
La función W(Z|Y) corresponde al costo cTX(Z|Y) como función de Z cuando se ha definido previamente Y. El
subproblema coordinado para X es
SP2(Z|Y) = { Min W(Z|Y) = cTX | AX = b - F(Y) - GZ ; XR+ }
El modelo coordinador CZ(Y): formulado con base en la teoría de Benders es
CZ(Y): = { Min eTZ + W(Z|Y) |
GZZ = bZ - FZ(Y) ; ZR+ ;
W(Z|Y) (n)T(b - F(Y) - GZ) , n=1,ITEX }
donde n representa al n-ésimo vector de variables duales de las restricciones AX=b-F(Y)-GZ que ha sido generado
por SP2(Z|Y):, e ITEX representa el total de cortes.
El modelo coordinador CZ(Y): y el problema coordinado SP1(Y): son equivalentes. Para efectos de la coordinación en
CY: se debe determinar X y Z a partir de la solución de CZ(Y):. Para ello consideremos el problema dual de CZ(Y):
DCZ(Y): = { Max [ n=1,ITEX (n) n]T(b - F(Y)) + ZT(bZ - FZ(Y)) |
[n=1,ITEX (n) n]TG + ZTGZ eT ;
n=1,ITEX (n) = 1 ;
(n)R+ , n=1,ITEX }

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
donde (n) es una componente del vector y corresponde a la variable dual del n-ésimo corte generado por el
subproblema SP2(Z|Y):
T = { (1), (2), ... ,(ITEX-1), (ITEX) }
En notación vectorial DCZ(Y): se puede expresar como
DCZ(Y): = { Max T(ITEX)T (b - F(Y)) + ZT(bZ - FZ(Y)) |
T(IITEX)TG + ZTGZ eT ;
T 1 = 1 ; R+ }
donde k representa la matriz que agrupa todos los vectores de variables duales que han sido generados hasta la
iteración k de CZ(Y):.
k = { 1, 2, ... , k-1, k }
y 1 corresponde a un vector con todas sus componentes iguales a 1.
Dado que los problemas duales DSP1(Y): y DCZ(Y): son equivalentes, se puede probar que Xk se calcula con base en
una ponderación de los vectores de variables duales generados por SP2(Z|Y):, utilizando como factor de ponderación
la variable dual asociada en el coordinador CZ(Y):
Xk = n=1,ITEX(k) (n) n = T ITEX(k)
donde ITEX(k) define el número de cortes que ha generado SP2(Z|Y): en CZ(Y): hasta la iteración k de CZ(Y):.
Si se tiene en cuenta la teoría de programación subrogada (Greenberg & Pierskalla [3], Velásquez [4]) es posible
tomar ventaja de esta relación. En términos generales, la programación subrogada prueba que un conjunto de
restricciones puede reemplazarse por una restricción equivalente, generada a partir de una combinación lineal de
todas las restricciones, siempre y cuando los pesos de ponderación sean colineales con los multiplicadores de
Lagrange de cada una de ellas. Con base en este hecho, los cortes generados por SP2(Z|Y): pueden reemplazarse por
uno equivalente con base en la subrogación de ellos, donde los pesos de ponderación corresponden a las variables
duales asociadas a cada corte. Este hecho ocurre cada vez que el coordinador CZ(Y): encuentra un punto óptimo
{X(Y), Z(Y)} y retorna un vector de variables duales al coordinador CY:.
El corte subrogado sintetiza toda la información que hasta ese momento ha sido procesada en CZ(Y):. De esta manera
se evita que el número de cortes provenientes del nivel inferior prolifere a medida que transcurre el proceso de
optimización, ya que cada vez que se comienza un ciclo de optimización en CZ(Y): todos los cortes generados son
reemplazados por el corte subrogado equivalente que preserva la memoria del sistema.
La definición de Xk es general para el cálculo en cualquier coordinador de las variables duales de las restricciones
que no están consideradas explícitamente en él y que son manejadas en niveles jerárquicos inferiores. Las variables
duales de estas restricciones corresponden al vector subrogado de variables duales del problema primario. Para el
coordinador de mayor nivel corresponderán a las variables duales de la solución del problema.
4.2. CASO GENERAL MULTINIVEL
La extensión de esta teoría, para casos en los cuales se tienen más de dos niveles de coordinación, es directa. Cada
coordinador de un nivel inferior, al generar un corte al coordinador de nivel superior, sintetiza la información con
base en la generación del vector subrogado de variables duales, que será utilizado por el coordinador de nivel superior

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
para generar un corte, y reemplaza en el nivel inferior a todos los cortes que hasta ese momento se han utilizado para
generar la solución óptima parcial. Para el caso de S niveles consideremos el problema P:
P: = { Min i=1,S ciTXi + f(Y) |
F0(Y) = b0 ;
AiXi + q=1,i-1 Ei,qXq + Fi(Y) = bi , i=1,S ;
XiR+ , i=1,S ; YS }
donde Y corresponden a las variables de coordinación de primer nivel, nivel 0, y Xi a las variables de coordinación del
nivel i. XS corresponde al nivel inferior, o nivel primario. Matricialmente P: tiene una estructura triangular en bloques
que se presenta a continuación.
X1 X2 . . . . . XS Y
A1 F1
E2,1 A2 F2
E3,1 E3,2 A3 .
. . . . .
.
ES-1,1 ES-1,2 ES-1,3 . . . AS-1 .
ES,1 ES,2 ES,3 . . . ES,S-1 AT FT
F0
El modelo coordinador de nivel 0 es
CY: = { Min Z = Q(Y) + f(Y) |
F0(Y) = b0 ; YS ;
Q(Y) i=1,S (i,1k)T(bi - Fi(Y)) , k=1,ITE }
El modelo coordinador asociado a las variables Xi , para i entre 1 y S-1, es
CXi(Y,X1,X2, ... ,Xi-1): = { Min ciTXi + Wi(Xi|Y,X1,X2, ... ,Xi-1) |
AiXi = bi - q=1,i-1 Ei,qXq - Fi(Y) ; XiR+ ;
Wi(Xi|Y,X1,X2,...,Xi-1) q=i+1,S (q,i+1)T(bq - Eq,iXq-1) , k=1,ITEX(i+1) }
donde el q,ik corresponde al vector subrogado de variables duales en el nivel i asociado a las restricciones del nivel q,
y cumple con
q,ik = n=1,ITEX(i,k) i(n) q,i+1
n = ( ik)T q,i
k
donde i(n) es una componente del vector i y corresponde a la variable dual del n-ésimo corte generado por el
subproblema CXi+1(Y,X1,X2, ... ,Xi):
iT = { i(1), i(2), ... , i(ITEX(i+1)-1), i(ITEX(i+1)) }
y la matriz ik agrupa los vectores subrogados de variables duales se han generado en el nivel i hasta la iteración k de
CXi(Y,X1,X2, ... ,Xi-1):, siendo ITEX(i,k) el total de cortes.
q,ik = {q,i
1, q,i2, ... , q,i
ITEX(i,k)-1, q,iITEX(i,k) }

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
Las variables duales correspondientes a las restricciones funcionales del nivel i en el coordinador i se denominaran
i,i.
El subproblema primario SPS(Y,X1,X2, ... ,XS-1):
SPS(Y,X1,X2, ... ,XS-1): = { Min cSTXS | ASXS = bS - q=1,S-1 ES,qXq - FS(Y) ; XSR+ }
equivale a un coordinador de nivel i, evaluado para i igual a S, sin incluir los cortes y la función W(). Dada la anterior
equivalencia la formulación del algoritmo se realiza en términos de solo problemas coordinadores.
En la forma convencional de implementar la teoría multinivel, cada nivel jerárquico retorna al nivel superior solo
cuando se ha obtenido la solución óptima al problema parametrizado por las decisiones prefijadas en los niveles
superiores, esto implica que en los niveles inferiores se realizan ciclos enlazados para los diferentes niveles superiores.
Las síntesis por medio de los vectores duales subrogados evitan la explosión de cortes a medida que transcurre el
proceso. Se pueden diseñar formas alternativas de implementación con la finalidad de acelerar el proceso de solución.
Estas alternativas no se presentan en este artículo.
5. TEORIA DE DESCOMPOSICION MULTINIVEL
La combinación de la teoría de descomposición y de la teoría multinivel permite la "atomización" de problemas con
estructuras especiales, descomponiendo y partiendo el problema de acuerdo con una escala jerárquica de criterios.
Consideremos un caso de tres niveles
P: = { Min Z = i=1,S ciTXi + eTZ + f(Y) |
F0(Y) = b0 ;
GZZ + FZ(Y) = bZ ;
AiXi + GiZ +Fi(Y) = bi , i=1,S ;
XiR+ , i=1,S ; ZR+ ; YS }
Utilizando la teoría multinivel el coordinador CY: es
CY: = { Min Z = Q(Y) + f(Y) |
F0(Y) = b0 ; YS ;
Q(Y) i=1,S Xik
(bi - Fi(Y)) + Zk
(bZ - FZ(Y)) , k=1,ITE }
donde Xi corresponde al vector de variables duales de las restricciones AiXi+GiZi=b-Fi(Y), Z al vector de variables
duales de GZZ=bZ-FZ(Y), e ITE al número de cortes que se han generado en CY: El coordinador sobre Z es
CZ(Y): = { Min eTZ + W(Z|Y) |
GZZ = bZ - FZ(Y) ; ZR+ ;
W(Z|Y) i=1,S ( in)T(b - Fi(Y) - GiZ) , n=1,ITEX }
donde in representa al n-ésimo vector de variables duales correspondientes a las restricciones AiXi=bi-Fi(Y)-GiZ que
ha sido generado por SP2(Z|Y):, e ITEX representa el total de cortes generados. El subproblema primario SPX(Z|Y):
es
SPX(Z|Y) = { Min W(Z|Y) = i=1,S ciTXi |
AiXi = bi - Fi(Y) - GiZ , i=1,S ; XiR+ , i=1,S }

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
La teoría de descomposición desacopla SPX(Z|Y): y los cortes asociados a las restricciones propias de Xi. Los
subproblemas primarios quedan asociados al subíndice i
SPXi(Z|Y) = { Min Wi(Z|Y) = ciTXi | AiXi = bi - Fi(Y) - GiZ ; XiR+ }
El modelo coordinador CZ(Y): con cortes desacoplados es
CZ(Y): = { Min eTZ + W(Z|Y) |
GZZ = bZ - FZ(Y) ; ZR+ ;
W(Z|Y) = i=1,S Wi(Z|Y) ;
Wi(Z|Y) ( in)T(b - Fi(Y) - GiZ) , i=1,S , n=1,ITEX(i) }
donde ITEX(i) es el número de cortes generados con SPXi(Z|Y). El dual DCZ(Y): es
DCZ(Y): = { Max [ i=1,S [n=1,ITEX(i) i(n) in ]T(bi - Fi(Y))] + Z(bZ - FZ(Y)) |
[ i=1,S [n=1,ITEX(i) i(n) in ]TGi ] + Z
TGZ eT ;
n=1,ITEX(i) i(n) = 1 , i=1,S ;
i(n)R+ , i=1,S , n=1,ITEX(i) }
donde i(n) es una componente del vector i y corresponde a la variable dual del n-ésimo corte generado por
SPXi(Z|Y):
iT = { i(1), i(2), ... ,i(ITEX(i)-1), i(ITEX(i)) }
ik es la matriz que agrupa los vectores de variables duales generados por SPXi(Z|Y): hasta la iteración k de CZ(Y):,
con un número de elementos igual a ITEX(i,k)
ik = {Xi1, Xi
2, ... , XiITEX(i,k)-1, Xi
ITEX(i,k) }
los multiplicadores Xik se calculan como
Xik = n=1,ITEX(i,k) i(n) in = ( i
k)T i+1k
donde ik esta asociado a la iteración k de CZ(Y):. El coordinador general CY: es
CY: = { Min Z = Q(Y) + f(Y) |
F0(Y) = b0 ; YS ;
Q(Y) i=1,S (Xik)T(bi - Fi(Y)) + (Z
k)T(bZ - FZ(Y)) , k=1,ITE }
6. TEORIA DINAMICA
Consideremos el problema P:
P: = { Min t=1,T ctTXt | AtXt = bt - Et-1Xt-1 , t=1,T ; XtR+ }
el cual es un caso particular del enfoque multinivel cuando asociamos el nivel jerárquico a cada período, y se definen T
niveles, el primero de ellos asociado al período 1 y el último, nivel primario, al período T; adicionalmente, no existe el
vector Y, y las matrices que relacionan las variables entre diferentes períodos, solo son diferentes de cero para dos

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
períodos consecutivos. Matricialmente P: tiene la siguiente forma
X1 X2 . . . . . XT
A1 E1 A2
E2 A3
. . . . . .
. . . AT-1
ET-1 AT
A partir de la teoría multinivel el modelo coordinador del período t se formula como
CXt(X1,X2, ... ,Xt-1): = { Min ctTXt + Qt(Xt|X1,X2, ... ,Xt-1) |
AtXt = bt - Et-1Xt-1 ; XtR+ ;
Qt(Xt|X1,X2,...,Xt-1) + (q+1,t)TEtXt q=t+1,T (q,t)Tbq , k=1,ITEX(t+1) }
donde el q,tk corresponde al vector subrogado de variables duales en el período t asociadas a las restricciones del
período q y cumple con
q,tk = n=1,ITEX(t,k) t(n) q,t+1
n = ( tk)Tq,t+1
k
donde t(n) es una componente del vector t y corresponde a la variable dual del n-ésimo corte generado por el
subproblema CXt+1(X1,X2, ... ,Xt):
tT = { t(1), t(2), ... ,t(ITEX(t+1)-1), t(ITEX(t+1)) }
y tk representa la matriz que agrupa todos los vectores subrogados de variables duales que han sido generados en el
período t hasta la iteración k de CXt(Y,X1,X2, ... ,Xt-1):, siendo ITEX(t,k) el número total de estos cortes.
q,tk = {q,t
1, q,t2, ... , q,t
ITEX(t,k)-1, q,tITEX(t,k) }
La función Qt(Xt|X1,X2,...,Xt-1) representa los costos futuros asociados al funcionamiento del sistema desde el período
t+1 hasta el período T, como función de la decisión Xt y de las decisiones realizadas entre 1 y t-1. El subproblema de
nivel primario SPT(X1,X2, ... ,XT-1):
SPT(X1,X2, ... ,XT-1): = { Min cTTXT | ATXT = bT - ET-1XT-1 ; XTR+ }
es equivalente al coordinador del período t, evaluado para t igual a T, sin incluir los cortes generados por el período
siguiente. Las variables duales correspondientes a este subproblema se denominaran T,T.
Con el propósito de simplificar la notación, en adelante el coordinador para el período t se denominará CXt(Xt-1): y la
función de costo futuro Qt(Xt).
Alternativamente, el desarrollo de la teoría para la solución a P: puede obtenerse utilizando el enfoque de
programación dinámica, como es el caso de estudios realizados en el sector eléctrico por M.F. Pereira y que dan
origen a la denominada SDDP -Stochastic Dual Dynamic Programming" [5] [6] [7]. Las formulaciones teóricas
presentadas en dichas referencias difieren en el cálculo del coeficiente constante del corte con respecto a la formula

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
que se presenta en esta investigación. El enfoque de programación dinámica se basa en establecer el efecto de las
decisiones desde la etapa t hasta la T, como función de las decisiones en la etapa t-1. Comenzando por la etapa T se
van acumulando los efectos hasta llegar a la etapa 1; para obtener una formulación general se realiza un proceso de
inducción matemática. Una presentación detallada de la demostración de la teoría utilizando este esquema se
encuentra en la referencia [8].
El coordinador del período 1, CX1:, es el coordinador general del proceso de optimización. El algoritmo de solución
puede implementarse de acuerdo con el siguiente proceso: en una fase primal, nos movemos del período 1 al período T
resolviendo parcialmente los subproblemas de forma tal que se genera el valor de Xt-1 para los coordinadores CTt:,
esta fase se puede denominar fase primal. Una vez se ha llegado hasta el período T se comienza la fase dual, en la cual
se van insertando los cortes en los subproblemas. Este proceso es similar al propuesto por M.F. Pereira [5].
7. TEORÍA DINAMICA DE DESCOMPOSICION MULTINIVEL
La combinación de la teoría dinámica, la teoría de descomposición, y la teoría multinivel la "atomización" de un
problema. La teoría dinámica considera un solo tipo de variables Xt y define un proceso dinámico que relaciona Xt+1
con Xt. Las variables que acoplan dos períodos de tiempo consecutivos están relacionadas con el manejo del
almacenamiento de recursos, en tanto que las variables relacionadas con la operación no están involucradas
directamente en la relación dinámica. En estos casos se puede formular un problema con una mayor especificación de
variables. Consideremos el problema P:
P: = { Min t=1,T ctTXt + dt
TYt |
AtXt = b1t - Et-1Xt-1 , t=1,T ;
BtXt + GtYt = b2t , t=1,T ;
YtR+ ; XtR+ }
en el cual Xt esta asociada a la dinámica del sistema, normalmente niveles de inventario, y Yt a la operación del
sistema. Matricialmente P: tiene la siguiente estructura:

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
X1 X2 . . . XT Y1 Y2 . . . YT
A1 B1 G1 E1 A2
B2 G2
E2 A3
B3 G3
... ...
...
... AT-1 BT-1 GT-1
ET-1 AT BT GT
Para la demostración de la teoría dinámica multinivel utilizaremos el enfoque de programación dinámica hacia atrás -
backward dynamic programming-. En primera instancia definamos a Xt como las variables de coordinación para así
descomponer el problema a nivel temporal. El problema coordinador para Xt es
CX: = { Min t=1,T ctTXt + Wt(Xt) |
AtXt = b1t - Et-1Xt-1 , t=1,T ; XtR+ ;
Wt(Xt) = { Min dtTYt | GtYt = b2t - BtXt ; YtR+ } , t=1,T }
Wt(Xt) representa los costos de operación en el período t como consecuencia de las decisiones Xt y corresponde a la
función objetivo del subproblema de operación SPYt(Xt):
SPYt(Xt): = { Min Wt(Xt) = dtTYt | GtYt = b2t - BtXt ; YtR+ }
El coordinador CX: incluyendo los cortes generados por los subproblemas SPYt(Xt): es
CX: = { Min t=1,T ctTXt + Wt(Xt) |
AtXt = b1t - Et-1Xt-1 , t=1,T ; XtR+ ;
Wt(Xt) + ( tk)TBtXt ( t
k)Tb2t = ßt(k) , t=1,T , k=1,ITEY(t) }
donde t corresponde al vector de variables duales del conjunto de restricciones GtYt=b2t-BtXt, y ßt(k) corresponde al
valor del lado derecho del k-ésimo corte generado por SPYt(Xt):. En notación vectorial ßtn agrupa todos los elementos
ßt(k) contemplados en la n-ésima iteración del coordinador CX:
(ßtn)T = { ßt(1), ßt(2), ... , ßt(ITEY(t,n) -1), ßt(ITEY(t,n)) }
donde ITEY(t,n) representa el número de cortes generados por SPYt(Xt): hasta la iteración n.
El coordinador CX: puede resolverse utilizando los principios en que se basa la teoría dinámica. Definamos la función
de costo futuro QT(XT-1) para el período T como función de las decisiones XT-1 que corresponde a la función objetivo de
SPXT(XT-1):
SPXT(XT-1): = { Min QT(XT-1) = cTTXT + WT(XT) |
ATXT = bT - ET-1XT-1 ; XTR+ ;

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
WT(XT) + (T
k)TBTXT (Tk)T b2T = ßT(k) , k=1,ITEY(T) }
el problema dual correspondiente es
SPXT(XT-1): = { Max (T)T(b1T - ET-1XT-1) + (T)TßT |
(T)TAT + [n=1,ITEY(T) T(n)Tn ]T BT cT
T ;
n=1,ITEY(T) T(n) = 1 }
donde t(n) es la variable dual correspondiente al n-ésimo corte generado por SPYt(Xt) que se almacena en el vector
t.
tk= { t(1), t(2), ... , t(ITEY(t,k)-1), T(ITEY(t,k)) }
donde ITEY(t,k) representa el número de cortes generados por SPXT(XT-1):. El problema coordinador CXT: es
CXT-1: = { Min t=1,T-1 (ctTXt + Wt(Xt)) + QT(XT-1) |
AtXt = b1t - Et-1Xt-1 , t=1,T-1 ; XtR+ ;
Wt(Xt) + ( tk)TBtXt ( t
k)Tb2t , t=1,T-1 , k=1,ITEY(t) ;
QT(XT-1) + (Tk)TET-1XT-1 (T
k)Tb1T + (Tk)TßT
k = T(k) , k=1,ITEX(T) }
t(k) es el valor del lado derecho del k-ésimo corte generado por SPXt(Xt--1): en CXt-1:. En notación vectorial tn
agrupa los elementos t(k) incluidos en la n-ésima iteración de CXt-1:
( tk)T = { t(1), t(2), ... , t(ITEX(t,k) -1), t(ITEX(t,k)) }
donde ITEX(t,k) representa el número de cortes generados hasta la iteración k.
Para el período T-1 se debe considerar la aplicación de la teoría de Benders sobre el coordinador CXT-1: que no
contempla XT, pero sí la función de costo futuro QT(XT-1) que estima los costos asociados a XT y YT. Seleccionando
como variables coordinadas a XT-1, y como variables de coordinación las Xt para los períodos 1 a T-2, SPXT-1(XT-2):
queda
SPXT-1(XT-2): = { Min QT-1(XT-2) = cT-1TXT-1 + WT-1(XT-1) + QT(XT-1) |
AT-1XT-1 = bT-1 - ET-2XT-2 ; XT-1R+ ;
WT-1(XT-1) + (T-1k)TBT-1XT-1 (T-1
k)T b2T-1 = ßT-1(k) , k=1,ITEY(T) ;
QT(XT-1) + (Tk)TET-1XT-1 (T
k)Tb1T + ( Tk)TßT(n) = T(k) , k=1,ITEX(T) }
el problema dual correspondiente es
DSPXT-1(XT-2): = { Max (T-1)T(b1T-1 - ET-2XT-2) + (T-1)TßT-1 + (T)TT |
(T-1)TAT-1 + [n=1,ITEY(T) T-1(n)T-1n]TBT-1 + [n=1,ITE(T) T-1(n)T-1
n]T ET-1 cT-1T ;
n=1,ITE(T) T-1(n) = 1
n=1,ITEY(T) T-1(n) = 1 }
donde t(n) corresponde a la variable dual del n-ésimo corte generado por SPt(Xt-1):, y es componente del vector t.
tT= { t(1), t(2), ... , T(ITEX(t)-1), T(ITEX(t)) }

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
En notación vectorial DCZ(Y): se puede expresar como
DSPT-1(XT-2): = { Max T-1T(bT-1 - ET-2XT-2) + (T-1)TßT-1 + T
TT |
T-1TAT-1 + [n=1,ITEY(T) T-1(n)T-1
n]TBT-1 + TT (T
ITEX(T))T ET-1 cT-1T ;
TT 1 = 1 ; T-1
T 1 = 1 ;
T-1R+ ; TR+ }
donde tk representa la matriz que agrupa todos los vectores de variables duales que han sido generados por SPt-1(Xt-
2): hasta la iteración k de CXt-2:, siendo ITEX(t,k) el número total de cortes.
tk= {t
1, t2, ... , t
ITEX(t,k)-1, tITEX(t,k) }
el corte generado es
QT-1(XT-2) + (T-1k)TET-2XT-2 (T-1
k)Tb1T-1 + ( T-1k)TßT-1
k + (Tk)TT
k = T-1(k)
Se puede deducir que el corte para un período t es
Qt+1(Xt) + (t+1k)TEtXt (t+1
k )Tbt+1 + ( t+1k)Tßt+1
k + ( t+2k)T t+2
k = t+1(k)
el modelo coordinador CXt:
CXt: = {Min q=1,t (cqXq + Wq(Xq)) + Qt+1(Xt) |
AqXq = bq - Eq-1Xq-1 , q=1,t ;
Wq(Xq) + (qk)TBqXq (q
k)Tb2q = ßq(k) , q=1,T , k=1,ITEY(q);
Qt+1(Xt) + (t+1k)TEtXt (t+1
k )Tbt+1 + ( t+1k)Tßt+1
k + ( t+2k)T t+2
k , k=1,ITE(t+1) ;
XqR+ ; q=1,t }
y el subproblema SPXt(Xt-1):
SPXt(Xt-1) = { Min Qt(Xt-1) = ctXt + Wt(Xt) + Qt+1(Xt) |
AtXt = bt - Et-1Xt-1 ; XtR+ ;
Wt(Xt) + ( tk)TBtXt ( t
k)Tb2t = ßt(k) ;
Qt+1(Xt) + (t+1k)T EtXt t+1(k) }
donde t(k) esta definida como
t(k) = (tk )Tbt + ( t
k)Tßtk + ( t+1
k)T t+1k
El coordinador del período 1, CX1:, es el coordinador general del proceso de optimización y su estructura es igual a la
del subproblema asociado a la etapa 1, SPX1(X0):. cuando X0 representa las condiciones iniciales del sistema.
El enfoque multinivel, con el cual se presentó la teoría dinámica, es equivalente al de programación dinámica hacia
adelante -fordward dynamic programming- y los resultados obtenidos son los mismos que se obtienen con el enfoque
presentado en el presente numeral con programación dinámica hacia atrás. Sin embargo, la visión del problema es
diferente: en el enfoque multinivel la solución del problema se convierte en la solución en cadena de subproblemas
coordinadores, en tanto que en el enfoque de programación dinámica hacia atrás, la solución se convierte en la
solución en cadena de subproblemas primarios. Esta visión dual implica que los subproblemas se comportan
simultáneamente como coordinadores y como subproblemas coordinados. Enfoque que es similar al que propone Van
Roy [9] cuando formula la teoría de descomposición cruzada para integrar la teoría de Benders con la de Relajación
OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
Lagrangiana.
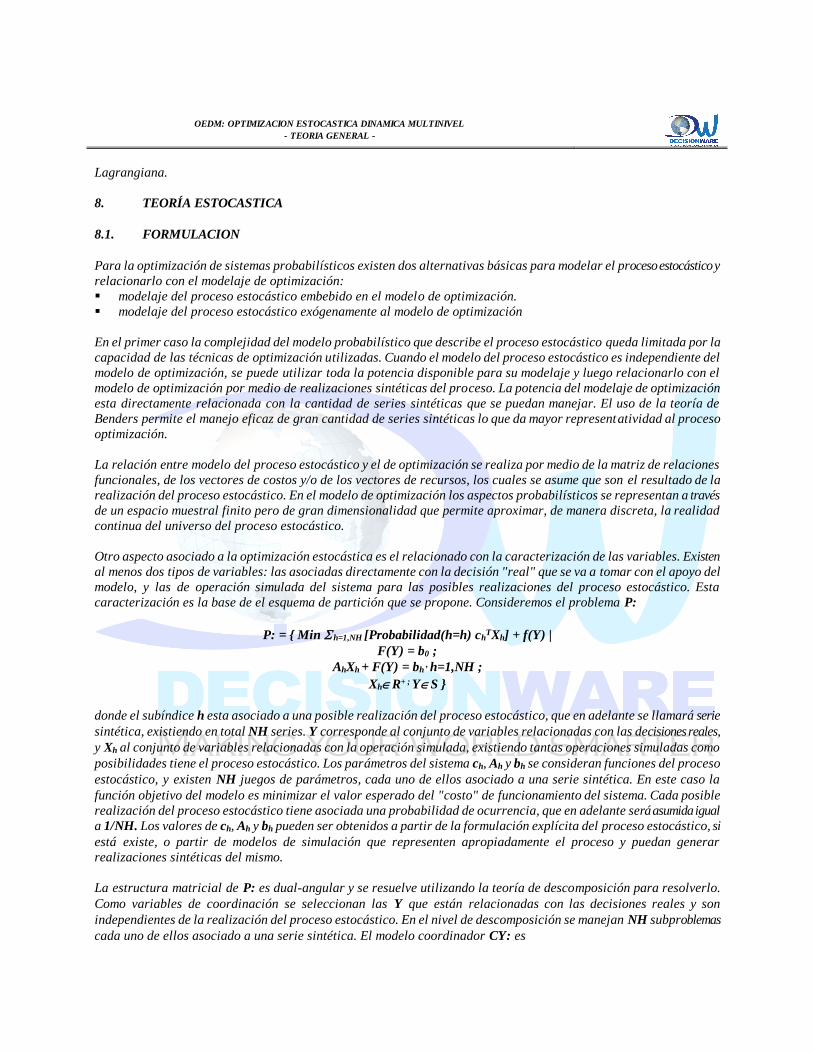
8. TEORÍA ESTOCASTICA
8.1. FORMULACION
Para la optimización de sistemas probabilísticos existen dos alternativas básicas para modelar el proceso estocástico y
relacionarlo con el modelaje de optimización:
▪ modelaje del proceso estocástico embebido en el modelo de optimización.
▪ modelaje del proceso estocástico exógenamente al modelo de optimización
En el primer caso la complejidad del modelo probabilístico que describe el proceso estocástico queda limitada por la
capacidad de las técnicas de optimización utilizadas. Cuando el modelo del proceso estocástico es independiente del
modelo de optimización, se puede utilizar toda la potencia disponible para su modelaje y luego relacionarlo con el
modelo de optimización por medio de realizaciones sintéticas del proceso. La potencia del modelaje de optimización
esta directamente relacionada con la cantidad de series sintéticas que se puedan manejar. El uso de la teoría de
Benders permite el manejo eficaz de gran cantidad de series sintéticas lo que da mayor representatividad al proceso
optimización.
La relación entre modelo del proceso estocástico y el de optimización se realiza por medio de la matriz de relaciones
funcionales, de los vectores de costos y/o de los vectores de recursos, los cuales se asume que son el resultado de la
realización del proceso estocástico. En el modelo de optimización los aspectos probabilísticos se representan a través
de un espacio muestral finito pero de gran dimensionalidad que permite aproximar, de manera discreta, la realidad
continua del universo del proceso estocástico.
Otro aspecto asociado a la optimización estocástica es el relacionado con la caracterización de las variables. Existen
al menos dos tipos de variables: las asociadas directamente con la decisión "real" que se va a tomar con el apoyo del
modelo, y las de operación simulada del sistema para las posibles realizaciones del proceso estocástico. Esta
caracterización es la base de el esquema de partición que se propone. Consideremos el problema P:
P: = { Min h=1,NH [Probabilidad(h=h) chTXh] + f(Y) |
F(Y) = b0 ;
AhXh + F(Y) = bh , h=1,NH ;
XhR+ ; YS }
donde el subíndice h esta asociado a una posible realización del proceso estocástico, que en adelante se llamará serie
sintética, existiendo en total NH series. Y corresponde al conjunto de variables relacionadas con las decisiones reales,
y Xh al conjunto de variables relacionadas con la operación simulada, existiendo tantas operaciones simuladas como
posibilidades tiene el proceso estocástico. Los parámetros del sistema ch, Ah y bh se consideran funciones del proceso
estocástico, y existen NH juegos de parámetros, cada uno de ellos asociado a una serie sintética. En este caso la
función objetivo del modelo es minimizar el valor esperado del "costo" de funcionamiento del sistema. Cada posible
realización del proceso estocástico tiene asociada una probabilidad de ocurrencia, que en adelante será asumida igual
a 1/NH. Los valores de ch, Ah y bh pueden ser obtenidos a partir de la formulación explícita del proceso estocástico, si
está existe, o partir de modelos de simulación que representen apropiadamente el proceso y puedan generar
realizaciones sintéticas del mismo.
La estructura matricial de P: es dual-angular y se resuelve utilizando la teoría de descomposición para resolverlo.
Como variables de coordinación se seleccionan las Y que están relacionadas con las decisiones reales y son
independientes de la realización del proceso estocástico. En el nivel de descomposición se manejan NH subproblemas
cada uno de ellos asociado a una serie sintética. El modelo coordinador CY: es

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
CY: = { Min f(Y) + Q(Y) |
F(Y) = b0 ; YS ;
Q(Y) = h=1,NH Qh(Y)/NH
Qh(Y) (h k)T(bh - F(Y)) , h=1,NH , k=1,ITE(h) }
y el subproblema asociado a la serie h
SPh(Y): { Min chTXh | AhXh = bh - F(Y) ; XhR+ }
el dual correspondiente es
DSPh(Y) = { Max hT(bh - F(Y)) | h
TAh chT }
8.2. ANALISIS ESTRUCTURAL
Si se analiza las características estructurales de las matrices del modelo de optimización y la relación de sus
parámetros con el proceso estocástico, se pueden obtener ventajas que permitan implementar algoritmos eficaces para
la solución de P:. La variación de los parámetros como función del proceso estocástico determina las relaciones entre
las zonas de factibilidad primal y la zona de factibilidad dual de SPh(Y):
A continuación, analizaremos las posibles fuentes de variación de los parámetros del modelo. La pregunta de fondo es
la relacionada con la determinación de las condiciones bajo las cuales un parámetro es función del proceso
estocástico. Se deben analizar tres casos: que el vector de recursos sea función del proceso estocástico, que lo sea el
vector de costos, y/o que lo sea la matriz de relaciones funcionales.
Para sistemas industriales y de manejo de recursos naturales es frecuente que los aspectos estocásticos considerados
en el modelaje de optimización afecten el vector de recursos ya que este contiene componentes asociadas a la oferta y
demanda de bienes y servicios. En el sector eléctrico, por ejemplo, los aspectos relacionados con las posibilidades de
uso de agua para generación afectan directamente el lado derecho de las restricciones de almacenamiento de los
embalses del sistema, de una forma similar actúa la demanda cuando es considerada como una variable aleatoria.
El vector de costos es función del proceso estocástico cuando los precios de los diferentes recursos se consideran como
variables aleatorias; es frecuente encontrar formulaciones que consideran los precios como factores determinísticos, o
su aleatoreidad es manejada exógenamente al modelo con base en los conceptos de escenarios.
La matriz de relaciones funcionales representa la estructura tecnológica del sistema, la cual es función de la topología
y de los coeficientes tecnológicos de producción. Normalmente, los elementos de esta matriz se consideran como
determinísticos y se puede afirmar que, en muchos casos, la matriz A es independiente del proceso estocástico. Cuando
A es constante, independiente de h, la forma que toma SPh(Y): es
SPh(Y): = { Min chTXh | AXh = bh - F(Y) ; XhR+ }
y su dual es
DSPh(Y) = { Max hT(bh - F(Y)) | h
TA chT }
En el proceso de solución de los NH subproblemas se puede tomar ventaja de esta estructura.
Consideremos dos algoritmos básicos para la solución de problemas de programación lineal (PL): (i) PSRA(c, A, b,

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
X): Primal-Simplex-Revisado-Acotado: que resuelve PL a partir de un punto X que cumple con ser una solución básica
factible, y (ii) DSRA(c, A, b, X): Dual-Simplex-Revisado-Acotado: el cual resuelve PL a partir de un solución básica X
que cumple con las condiciones de optimalidad de PL, y por lo tanto =cBB-1 es una solución básica factible al dual.
La solución a SPh(Yk): puede obtenerse utilizando el algoritmo PSRA(ch,A,b*h(Y),X) donde X es un punto factible al
conjunto de restricciones AXh=bh-F(Y)=b*h(Y). Definamos X*
hk como la solución óptima a SPh(Yk) y analicemos el
proceso para obtener X*h+1
k, solución óptima a SPh+1(Yk), a partir de X*hk. Se sabe que una solución básica a SPh(Yk)
lo es también a SPh+1(Yk).
Las características de X*h
k se deben analizar desde dos puntos de vista: factibilidad y optimalidad: factibilidad: si el
vector de recursos es diferente en ambos subproblemas, no se puede afirmar que X*h
k sea factible a SPh+1(Yk); y
optimalidad: si la función de costos es diferente en ambos subproblemas, no se puede afirmar que X*h
k cumpla con las
condiciones de optimalidad de SPh+1(Yk)
Para el caso general, consideremos un proceso de dos pasos para obtener X*h+1
k a partir de X*h
k: en el primero se
recobra la factibilidad utilizando el algoritmo DSRA a partir de X*h
k, obteniendo un punto XFh+1
k, el cual es factible a
SPh+1(Yk) más no óptimo. Esto es
XFh+1
k = DSRA[ch, A, b*h+1(Yk), X*
hk]
en el segundo se busca la optimalidad obteniendo X*h+1
k utilizando el PSRA a partir de XFh+1
k, esto es:
X*i+1
k = PSRA[ch+1, A, b*h+1(Yk), Xf
h+1k]
Para la solución secuencial de los problemas SPh(Yk): se utiliza siempre el mismo tablero simplex ya que la matriz A es
común a todos, y los vectores Xh contienen estructuralmente la misma información. Si el vector de costos es
independiente de h se obvia el segundo paso; y en el caso que lo sea el vector de recursos, se obvia el primero.
Cuando simultáneamente la matriz A y el vector c son independientes de h se presenta una situación especial. En este
caso el problema dual de SPh(Y): es
DSPh(Y) = { Max hT(bh - F(Y)) | h
TA cT }
La zona de factibilidad dual es independiente de h lo que implica que cualquier vector h factible al subproblema
SPh(Y):, es factible a todos los subproblemas independientemente del valor de h. Este hecho se utiliza para aumentar la
eficacia del proceso de generación de cortes ya que un subproblema aporta información para generar cortes para todos
los subproblemas restantes.
Si se introduce el concepto de "banco" de variables duales, se puede definir un algoritmo tal que un ciclo coordinador-
subproblema implica la solución de un solo SPh(Yk): que aporta un valor factible de para que sea utilizado por todos
los subproblemas. La regla de selección del problema es el punto clave de este enfoque. El coordinador CY: puede
escribirse como
CY: = { Min f(Y) + Q(Y) |
F(Y) = b0 ; YS ;
Q(Y) = h=1,NH Qh(Y)/NH
Qh(Y) ( k)T(bh - F(Y)) , h=1,NH , k=1,ITE }
donde ITE agrupa todas los subproblemas que se han resuelto en el nivel primario independientemente de h.

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
Existen varias posibilidades para establecer una estrategia para seleccionar eficazmente el subproblema que se debe
resolver en el nivel de descomposición. Por ahora, sin mayor fundamento teórico, se sugiere seleccionar el
subproblema que maximiza el valor de la variable dual asociada a los cortes, siempre y cuando la diferencia entre el
costo estimado Qh(Y) y el costo real chTXh(Y) sea diferente de cero. Lo anterior implica resolver el problema j que
cumpla con
(j) = Max { (1), (2), (3), ... , (NH-1), (NH) }
donde (h) representa el valor máximo de las variables duales asociadas a los cortes relacionados con la serie h, esto
es
(h) = Max { h(1), h(2), h(3), ... ,h(ITE-1), h(ITE) }
donde h(k) corresponde a la variable dual del k-ésimo corte de la serie sintética h.
Otra posibilidad es seleccionar j de tal forma que se maximize la diferencia entre costo estimado y costo real, esto es
(j) = Max { |Qh(Y) - chTXh(Y)| , h=1,NH }
Otro aspecto a tener en cuenta en la implementación de un algoritmo es la forma de la incorporación de las series
sintéticas al proceso de optimización, ya que no es necesario manejar a través de todo el proceso todas las series.
Puede definirse un proceso de incorporación paulatina, siguiendo un criterio "razonable", ya que lo que importa es que
al final de la optimización se pueda probar la optimalidad para un gran número de series, independiente de cuál ha
sido el proceso seguido para conseguirla.
8.3. SINTESIS PROBABILISTICA
El enfoque de partición y de descomposición no solo permite solucionar el problema de optimización estocástica sino
que facilita la síntesis probabilística de la solución ya que todas las variables involucradas se pueden caracterizar
estadísticamente por medio de funciones de distribución.
Por ejemplo, respecto de los costos de operación, es posible determinar su función de distribución condicionada en un
valor dado de Y ya que el conjunto de valores Qh(Y) definen el espacio muestral para esta variable. De manera similar
es posible establecer funciones de distribución para todas las variables del modelo, tanto primales como duales. Estas
funciones pueden ser sujetas a pruebas de hipótesis o a cualquier otro análisis estadístico que sea posible realizar
sobre una muestra.
El vector de los valores esperado de las variables de operación se calcula como
X = h=1,NH Xh(Y)/NH
y el vector de desvíos estándar como
X = [h=1,NH (X - Xh(Y))2 ] 1/2
Si definimos h(Y) como los precios sombra de la operación para una posibilidad h, condicionados en una decisión Y
se pueden calcular como
h(Y) = k=1,ITE(h) h(k) hk

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
donde h(k) corresponde a la variable dual al k-ésimo corte de la serie sintética h, cuando el coordinador CY: a
generado a Y como una solución óptima parcial. Los valores h(Y) son un corte subrogado óptimo y pueden ser
utilizados para calcular las estadísticas principales de las variables duales de las restricciones AX+F(Y)=b.
Adicionalmente, a nivel del modelo coordinador es posible introducir restricciones relacionadas con el nivel de riesgo
asociado a la decisión Y. A manera de ejemplo se citan los siguientes tipos de restricciones:
a) limitar para el máximo costo de operación:
Qh(Y) costo máximo , h=1,NH
b) limitar para el valor esperado del costo de operación:
h=1,NH Qh(Y) costo esperado máximo
c) limitar la varianza del costo esperado asociado a la solución óptima
h=1,NH [([ h=1,NH Qh(Y)/NH ] - Qh(Y))2 ]/(NH-1) cota máxima
9. TEORIA ESTOCASTICA DINAMICA MULTINIVEL
La teoría estocástica dinámica multinivel es el resultado de la unión de todas las teorías analizadas previamente: la de
descomposición, la multinivel, la dinámica y la estocástica. La presentación de la teoría se realiza en dos etapas: la
primera relacionada con la descomposición estocástico temporal del sistema, y la segunda con la solución dinámica.
9.1. DESCOMPOSICION TEMPORAL
Consideremos el problema dinámico estocástico P:
P: = { Min c1TX1 + d1
TY1 + h=1,NH t=2,T [{ct,hTXt,h + dt,h
TYt,h}/NH] |
A1X1 = b11 - E0X0 ;
B1X1 + G1Y1 = b21 ;
A2,hX2,h = b12,h - E1,hX1 , h=1,NH ;
At,hXt,h = b1t,h - Et-1,hXt-1,h , t=3,T, h=1,NH ;
Bt,hXt,h + Gt,hYt,h = b2t,h , t=2,T, h=1,NH ;
X1 , Xt,hR+ ; Y1 , Yt,hR+ }
Las variables Xt,h representan el estado del sistema y acoplan su funcionamiento entre los diferentes períodos; las Yt,h
corresponden a las variables de operación al interior de un período. Todas las variables, con excepción de las del
primer período, están relacionadas con la simulación de la operación para cada serie sintética. Las variables del
período 1 corresponden a las decisiones reales y son independientes de las realizaciones aleatorias.
La solución a P: puede obtenerse aplicando la teoría dinámica multinivel y la teoría de descomposición estocástica. En
primera instancia se realizará la descomposición estocástico-temporal tomando como variables de coordinación a X1 y
a Xt,h, y como variables coordinadas a Y1 y a Yt,h.
Definamos la función Wt,h(Xt,h) que representa los costos de operación en el período t como consecuencia de las
decisiones de control sobre las variables de estado del mismo período para la serie h, y que corresponde al valor de la
función objetivo del subproblema de operación SPYt,h(Xt,h):

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
SPYt,h(Xt,h): = { Min Wt,h(Xt,h) = dt,hTYt,h | Gt,hYt,h = b2t,h - Bt,hXt,h ; Yt,hR+ }
el modelo coordinador CX:, incluyendo los cortes generados por los SPYt,h(Xt,h): es
CX: = { Min c1TX1 + W1(X1) +h=1,NH t=2,T [ {ct,h
TXt,h + Wt,h(Xt,h)}/NH ] |
A1X1 = b11 - E0X0 ;
A2,hX2,h = b12,h - E1,hX1 , h=1,NH ;
At,hXt,h = b1t,h - Et-1,hXt-1,h , t=3,T, h=1,NH ;
W1(X1) + (1k)TB1X1 (1
k)Tb21 , k=1,ITEY(1) ;
Wt,h(Xt,h) + ( t,hk)TBt,hXt,h ( t,h
k)Tb2t,h , t=2,T , h=1,NH ,k=1,ITEY(t,h) ;
X1 , Xt,h R+ }
donde t,h corresponde al vector de variables duales del conjunto de restricciones Gt,hYt,h=b2t,h-Bt,hXt,h e ITEY(t,h) el
número de cortes generados por SPYt,h(Xt,h):
9.2 DESCOMPOSICIÓN ESTOCASTICA DEL COORDINADOR
Definiendo como variables de coordinación las correspondientes al período 1, que son independientes de h, es posible
realizar una descomposición estocástica de CX:. El subproblema primario para la serie h es:
SXh(X1): = { Min Qh(X1) = t=2,T {ct,hTXt,h + Wt,h(Xt,h)}] |
A2,hX2,h = b12,h - E1,hX1 , h=1,NH ;
At,hXt,h = b1t,h - Et-1,hXt-1,h , t=3,T, h=1,NH ;
Wt,h(Xt,h) + ( t,hk)TBt,hXt,h ( t,h
k)Tb2t,h = ßt,h(k) , t=2,T , h=1,NH ,k=1,ITEY(t,h) ;
Xt,h R+ }
y también corresponde al coordinador de la operación simulada para la realización h. La función Qh(X1) corresponde
al valor del costo de la operación del sistema, si ocurre la realización h y se toma la decisión X1.
El coordinador general para el período 1 es
CX: = { Min c1TX1 + W1(X1) + Q(X1) |
A1X1 = b11 - E0X0 ;
W1(X1) + (1k)TB1X1 (1
k)Tb21 = ß1(k) , k=1,ITEY(1) ;
Q(X1) = h=1,NH Qh(X1)/NH
Qh(X1) + (1,hk)TE1X1) t=2,T [(t,h
k)T(b1t,h) + ( t,hk)Tb2t,h ] , h=1,NH , k=1,ITEX(h) ;
X1R+ }
donde t,hk corresponde al vector subrogado de variables duales t,h en la k-ésima iteración de SXh(X1):, 1,h
k al vector
de variables duales para las restricciones A2,hX2,h=b12,h-Et-1,hX1, e ITEX(h) el número de cortes generados por
SPh(X1):. La función Q(X1) corresponde al valor esperado del costo futuro de operación del sistema.
9.3. DESCOMPOSICION DINAMICA DE COORDINADORES ESTOCASTICOS.
La teoría dinámica puede utilizarse para resolver el problema de coordinación asociado a cada serie h. El
subproblema para cada período t es
SXt,h(Xt-1,h): = { Min Qt,h(Xt-1,h) = ct,hTXt,h + Wt,h(Xt,h) + Qt+1,h(Xt,h) |

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
At,hXt,h = b1t,h - Et-1,hXt-1,h ;
Qt+1(Xt,h) + (t+1,t,h)TEtXt,h q=t+1,T (q,t,hTb1q,h ) + ( t+1,h
k)Tb2t,h , k=1,ITEX(t+1) ;
Wt,h(Xt,h) + ( t,hk)TBt,hXt,h ( t,h
k)Tb2t,h , t=2,T , h=1,NH ,k=1,ITEY(t,h) ;
Xt,h R+ }
donde el q,t,hk corresponde al vector subrogado de variables duales en el período t asociados a las restricciones del
período q para la serie h, y cumple con
q,t,hk = n=1,ITEX(t,h,k) t,h(n) q,t+1,h
n = ( tk)T t+1,h
k
donde t,h(n) es una componente del vector t,h y corresponde a la variable dual del n-ésimo corte generado por el
subproblema SXt+1,h(Xt,h):
t,hT = { t,h(1), t,h(2), ... ,t,h(ITEX(t+1,h)-1), t,h(ITEX(t+1,h)) }
y t,hk representa la matriz que agrupa los vectores subrogados de variables duales que han sido generados en el
período t para la serie h hasta la iteración k de SXt,h(Xt-1,h):, siendo ITEX(t,h,k) el número total de estos cortes.
t,hk = {t,h
1, t,h2, ... , t,h
ITEX(t,h,k)-1, t,hITEX(t,h,k) }
La función Qt,h(Xt-1,h) representa los costos futuros asociados al funcionamiento del sistema desde el período t+1 hasta
el período T si ocurre la realización h.
El subproblema de nivel primario SXT,h(XT-1,h):
SXT,h(XT-1,h): = { Min cT,hTXT,h |
AT,hXT,h = b1T,h - ET-1,hXT-1,h ;
WT,h(XT,h) + (T,hk)TBT,hXT,h (T,h
k)Tb2T,h , k=1,ITEY(T,h) ;
XT,hR+ }
es equivalente al coordinador del período t, evaluado para t igual a T, sin incluir los cortes generados por el período
siguiente. Las variables duales correspondientes a este subproblema se denominaran T,T,h.
9.4 ANALISIS ESTRUCTURAL
A continuación, se analiza la estructura matricial de P: con la finalidad de tomar ventaja de está cuando ello sea
posible. Consideremos los subproblemas SPYt,h(Xt,h):
SPYt,h(Xt,h): = { Min Wt,h(Xt,h) = dt,hTYt,h | Gt,hYt,h = b2t,h - Bt,hXt,h ; Yt,hR+ }
y su dual
DSPYt,h(Xt,h): = { Max ( t,hk)T(b2t,h - Bt,hXt,h) | ( t,h
k)TGt,h dt,hT }
Como se analizó en la teoría estocástica, las mayores ventajas se presentan cuando la matriz de relaciones funcionales
y el vector de costos son comunes para todos los subproblemas SPYt,h(Xt,h):. En este caso existe una fuente de variación
adicional a la estocástica, la relacionada con la variación temporal de los parámetros.
El análisis sobre la matriz de relaciones funcionales es simple. Normalmente, como en el caso estocástico puro, la

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
matriz G esta asociada a la topología del sistema y a sus características tecnológicas. Para una gran cantidad de casos
esta matriz es independiente de h y de t, esto es
Gt,h = G
Con respecto al vector de costos la situación es diferente. Si dt,h corresponde a una función de costo económico, y los
costos y precios son considerados como determinísticos se puede afirmar que existe independencia de los factores
estocásticos, dependiendo simplemente de t. Por lo tanto
dt,h = dt
Para este caso la zona de factibilidad dual de los subproblemas es independiente de h pero dependiente de t.
( t,hk)TG dt
T
Lo anterior implica que las variables duales t,h factibles a un período t y una serie h son factibles para cualquier serie
h para el mismo período. Este hecho independiza la variable dual de la realización aleatoria y se generan cortes para
todas las series h en el mismo período cuando se resuelve un subproblema SPYt,h(Xt,h):. Los cortes generados tienen en
este caso la siguiente estructura
Wt,h(Xt,h) + ( tk)TBt,hXt,h ( t
k)Tb2t,h , t=2,T , h=1,NH ,k=1,ITEY(t) ;
y
W1(X1) + ( tk)TB1X1 ( t
k)Tb21 , k=1,ITEY(1) ;
donde t corresponde a un vector de variables duales generadas por un subproblema SPYt,h(Xt,h):, e ITEY(t) define el
número de cortes generados para el período t.
Si se analiza la estructura de variación temporal de dt es posible obtener mayores ventajas. Asumamos una estructura
de variación temporal para dt dada por
dt = ß(t) d
donde ß(t) corresponde al factor utilizado para proyectar y/o pasar a valor presente los costos causados en el período
t. Cuando esta suposición es válida, se puede reorganizar la formulación para obtener ventaja de esta estructura. Para
este caso el área de factibilidad dual para cada subproblema es
( t,hk)TG ß(t) dT
es posible eliminar la dependencia temporal, si se realizan cambios en la formulación del coordinador. Consideremos
la definición de la función Wt,h(Xt,h)
Wt,h(Xt,h) = { Min ß(t) dTYt,h | GYt,h = b2t,h - Bt,hXt,h ; Yt,hR+ }
extrayendo el factor ß(t) del problema se puede formular la siguiente ecuación
Wt,h(Xt,h)/ß(t) = { Min dTYt,h | GYt,h = b2t,h - Bt,hXt,h ; Yt,hR+ }
Si se redefinen los subproblemas SPYt,h(Xt,h): como
SPYt,h(Xt,h): = { Min Wt,h(Xt,h) = dTYt,h | GYt,h = b2t,h - Bt,hXt,h ; Yt,hR+ }

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
la zona de factibilidad dual asociada es independiente de t y de h
( t,h)TG dT
Esta relación garantiza que un vector factible t,h lo es también para cualquier pareja {t,h} independientemente del
SPYt,h(Xt,h): que lo genere. En este caso los cortes tienen la siguiente estructura
Wt,h(Xt,h)/ß(t) + (k)TBt,hXt,h (k)Tb2t,h , t=2,T , h=1,NH , k=1,ITEY ;
y
W1(X1)/ß(t) + (k)TB1X1 (k)Tb21 , k=1,ITEY ;
donde corresponde a un vector de variables duales generadas por un subproblema SPYt,h(Xt,h):, e ITEY define el
número total de cortes generados en el nivel de descomposición.
Como en el caso estocástico, es posible formular un algoritmo en el cual, en un ciclo coordinador-subproblema, solo se
soluciona un subproblema SPYt,h(Xt,h): que aporta información para generar cortes para todas las parejas (t,h).
Si adicionalmente las matrices At,h y Bt,h son independientes de h
At,h= At
Bt,h = Bt
y el vector de costos ct,h puede expresarse como un vector colineal independiente de h y escalado para los diferentes
períodos por medio de un factor ß(t)
ct = ß(t) c
En este caso cada coordinador estocástico puede escribirse como:
SXh(X1): = { Min Qh(X1) = t=2,T ß(t)[cTXt,h + W*t,h(Xt,h)] |
A X2,h = b12,h - E X1 , h=1,NH ;
A Xt,h = b1t,h - E Xt-1,h , t=3,T, h=1,NH ;
Wt,h(Xt,h) + (k)TB Xt,h (k)Tb2t,h , t=2,T , h=1,NH , k=1,ITEY ;
W1(X1)+ (k)TB X1 (k)Tb21 , k=1,ITEY ;
Xt,h R+ }
La zona de factibilidad dual del coordinador estocástico puede escribirse como:
(t,h)TA + (t+1,h )TA + k=1,ITEY t,hk (k)TB = ß(t) c , t=2,T-1
(T,h)T A + k=1,ITEY T,hk (k)TB = ß(T) c
k=1,ITEY t,hk (k)T= ß(t) , t=2,T
t,h R+ }
que es independiente de h y por lo tanto un vector de variables duales factible al dual de un subproblema SXh(X1): lo es
para todos los subproblemas independientemente del índice h, esto implica que un subproblema SXh(X1): genera cortes
para todos los subproblemas restantes. El corte generado puede escribirse como:

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
Qh(X1) + (1
k)TE X1 t=2,T [(tk)Tb1t,h+ ( t
k)Tb2t,h ] , h=1,NH , k=1,ITEX ;
donde t corresponde al vector de variables duales generado por un subproblema SXh(X1): para el conjunto de
restricciones AXt,h=b1t,h-EXt-1,h, e ITEX define el numero total de cortes generados a nivel de los coordinadores
estocásticos.
Como consecuencia del análisis estructural es posible definir el concepto de familias de problemas a tres niveles:
a) a nivel de coordinación general se tiene el problema CX:
CX: = { Min c1TX1 + W1(X1) + Q(X1) |
A X1 = b11 - E X0 ;
W1(X1) + (k)TB X1 (k)Tb21 = ß1(k) , k=1,ITEY ;
Q(X1) = h=1,NH Qh(X1)/NH
Qh(X1) + (1k)TE X1 t=2,T [(t
k)Tb1t,h+ ( tk)Tb2t,h ] , h=1,NH ,k=1,ITEX ;
X1R+ }
b) a nivel intermedio se tienen los coordinadores dinámicos estocásticos SXh(X1):
SXh(X1): = { Min Qh(X1) = t=2,T ß(t)[cTXt,h + W*t,h(Xt,h)] |
A X2,h = b12,h - E X1 , h=1,NH ;
A Xt,h = b1t,h - E Xt-1,h , t=3,T, h=1,NH ;
W*t,h(Xt,h) + (k)TB Xt,h (k)Tb2t,h , t=2,T , h=1,NH , k=1,ITEY ;
Xt,h R+ }
c) a nivel primario se tienen los subproblemas
SPYt,h(Xt,h): = { Min Wt,h(Xt,h) = dTYt,h | G Yt,h = b2t,h - B Xt,h ; Yt,hR+ }
Es importante notar que los tres niveles pueden trabajar en paralelo en forma asincrónica, lo que permite utilizar para
la solución del problema integrado computadores con múltiples procesadores, en donde se tienen procesadores
dedicados a solucionar problemas de un determinado nivel. Esta es el fundamento de lo que se puede denominar
Optimización Paralela Asincrónica -OPA-.
10. REFERENCIAS
[1] Benders, J.F. "Partitioning Procedures For Solving Mixed Variables Programming Problems". Numer.
Math 4, 238-252 (1962).
[2] Lasdon, L. "Optimization Theory for Large Systems". London, MacMillan Company (1970).
[3] Greenberg & Pierskalla. "Subrogate Programming". ORSA.
[4] Velásquez, J., "P.D.S. Subrogate Primal-Dual Algorithm". Documento de Trabajo. Postgrado en
Aprovechamiento de Recursos Hidráulicos, Facultad de Minas, Universidad Nacional, Medellín,
COLOMBIA (1994).
[5] Pereira, M.V.F.. "Stochastic Operation Scheduling of Large Hydroelectric Systems". Electric Power &
Energy Systems, Vol 11(3-1989)

OEDM: OPTIMIZACION ESTOCASTICA DINAMICA MULTINIVEL
- TEORIA GENERAL -
[6] Pereira, M.V.F. y Pinto, L.M.V.G.. "Stochastic Optimization of a Multireservoir Hydroelectric System: a
Decomposition Approach". Water Resources Research, Vol 21, No. 6, pp 779-792 (1985).
[7] Gorensin, B.G. et al. "Stochastic Optimization of a Hydro-Thermal System including Network
Constrains". Transaccion on Power Systems, Vol 7(2) 791-797 (1992)
[8] Velásquez, J., "Optimización Estocástica Dinámica Multinivel utilizando la Teoría de Benders".
Documento de Trabajo. Postgrado en Aprovechamiento de Recursos Hidráulicos, Facultad de Minas,
Universidad Nacional, Medellín, COLOMBIA (1994).
[9] Van Roy, T.J. "A Cross Decomposition Algorithm For Capacited Facility Location". ORSA Vol 34 (1-
1986).