object inter-camera tracking with non- overlapping views: a new dynamic approach trevor montcalm...
TRANSCRIPT

Object Inter-Camera Tracking with non-overlapping views: A new dynamic
approach
Trevor MontcalmBubaker Boufama
Layout of Todays Presentation
Basics of Object Tracking, bottom to top overview
Single Camera and Inter-Camera Tracking Features used for Object Tracking Camera Linking Emphasizing factors Experimental Results

What is Object Tracking?
The task of tracking objects as they move within an area under video surveillanceo Objects could be people, cars,
anything of interest
How is this accomplished?

Other significant works
Mohammed Ahsan Alio Feature-based tracking
Andrew Gilberto Matrix-based color transfer functions between
cameras
Y. Cai, J. Kango Advanved shape and color descriptor used to
match objects

Background Subtraction
Subtracts a background model from the current frame to classify which pixels are foreground and background
Foreground pixels are of interest, objects in the scene
The Adaptive Gaussian Mixture Model background subtraction algorithm was used

Background Subtraction

Blob Formation
A blob is a group of foreground pixels that might be a real-life object
Decides which groups are blobs, and which are noise
Three steps:o Smooth background subtracted imageo Use Connected Component Analysis to discover
groupso Blob size thresholding, merging if close enough

Blob Formation

Single camera object tracking
Matches blobs to the set of known objects in the sceneo Done for each frame of video
Matching is accomplished by comparing the feature vector of each blob and objecto A feature vector is a collection of featureso Each feature describes a property of the object
or blob
Occlusions handled with Kalman filter

Inter-Camera Tracking
The specific task of object tracking across camera views that are non-overlapping
Each camera has a separate field of vision

Features Used for Object Tracking
Location – The current centroid of an object Velocity – Objects 2D velocity (pixels/sec) Width – Object width Height – Object height Size – Object size (# of foreground pixels)
Basic Features:

Features Used for Object Tracking
Histogram – Color histogram of the object Shape – 49 Zernike Moments
All feature values are normalized to facilitate comparison between different cameras
Advanced Features:

Comparing Feature Vectors
Single camera object tracking: o Differences of all features are averaged for a
final difference
Inter-camera object tracking:o Individual features are emphasized or
depreciated, depending on circumstanceso This is the new dynamic approach mentioned in
the title

Emphasizing Factors
Time: Emphasize more recent appearances Camera Link Quality: Use previous
matching information to systems advantage Stability: Emphasize more stable features
over unstable ones

Camera Link Quality
Between each pair of cameras is a camera link
Stores a Camera Transfer Function, which translates a feature vector from one camera to another
Idea is to use previous matching history to translate featureso Exploit redundancy in object movement patterns
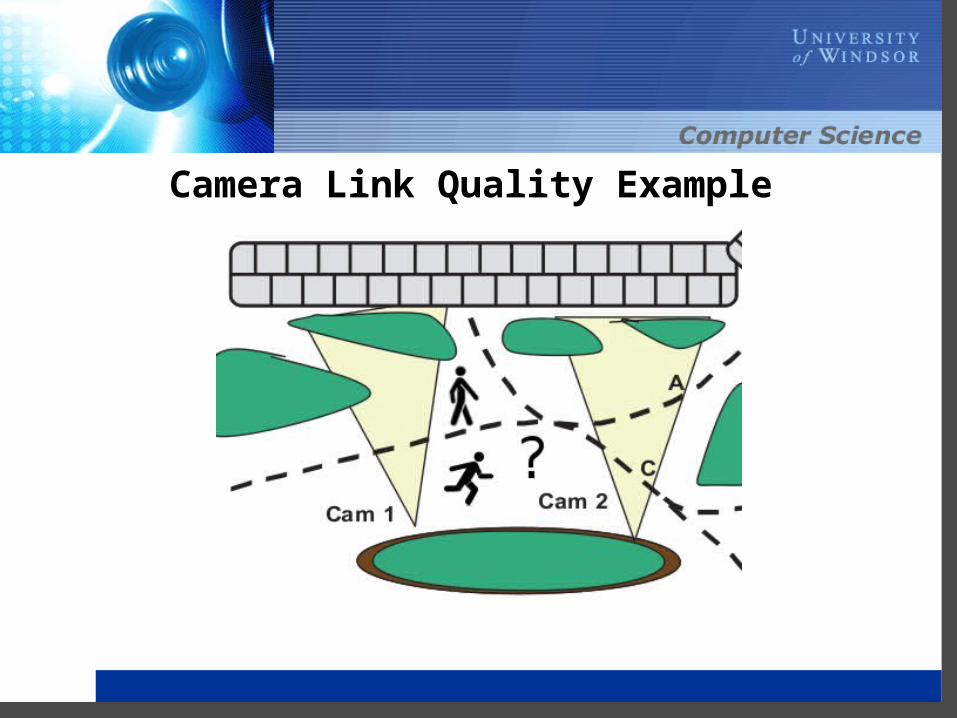
Camera Link Quality Example

Building the Matching Feature Vector
An aggregate feature vector used to represent the object in matchingo Aggregation of many appearances
Time: More recent appearances are used Camera Link Quality: Reliably translated
features are emphasized Stability: More stable features are
emphasized

Building the Matching Feature Vector
Each feature vector translated to a target camera
Using recentness, translation quality, and feature quality, a single matching feature vector is built
Dynamic Weighting
Describes how to weigh each feature in a feature vector comparison, similar to matching feature vector
Emphasizes robust features for low-camera link quality
After matching data built up, more general features are weighed in

Object tracking decision
Best object/blob match is chosen, compared against a threshold
Single camera tracking: Preset threshold Inter-camera tracking: Dynamic threshold.
o At first, a low threshold (0.65)o After matching data is built up, more stringent
threshold (0.95)o Change in threshold is linear

Experimental Results
Two cameras used: Sony Cyber-shot DSC-S930 and a Kodak EasyShare C180o Low-resolution, off the self cameras with
differing color sensitivity
Surveillance videos filmed in two locations:o A large building hallwayo Domestic house

Experimental Results

Experimental Results

References
A. Gilbert and R. Bowden. Incremental, scalable tracking of objects inter camera. Computer Vision and Image Understanding, 111(1):43 – 58, 2008. Special Issue on Intelligent Visual Surveillance (IEEE).
M. Ali. Feature-based tracking of multiple people for intelligent video surveillance. In Masters Abstracts International, volume 45, 2006.
J. Kang, I. Cohen, and G. Medioni. Persistent objects tracking across multiple non overlapping cameras. In Proceedings of the IEEE Workshop on Motion and Video Computing (WACV/MOTION’05)-Volume, volume 2, pages 112–119.
Y. Cai, K. Huang, and T. Tan. Human Appearance Matching Across Multiple Non-overlapping Cameras. In Pattern Recognition, 2008. ICPR 2008. 19th International Conference on, pages 1–4, 2008.