nonstationary covariance structures ii nrcse. drawbacks with deformation approach oversmoothing of...
Post on 19-Dec-2015
215 views
TRANSCRIPT

Nonstationary covariance structures II
NRCSE
Drawbacks with deformation approach
Oversmoothing of large areas
Local deformations not local part of global fits
Covariance shape does not change over space
Limited class of nonstationary covariances
Nonstationary spatial covariance:
Basic idea: the parameters of a local variogram model–-nugget, range, sill, and anisotropy–vary spatially.
Consider some pictures of applications from recent methodology publications.
Major approaches:
Haas, 1990, Moving window krigingKim, Mallock & Holmes, 2005, Piecewise
Gaussian modelingNott & Dunsmuir, 2002, Biometrika,
Average of locally stationary processesFuentes, 2002, Kernel averaging of
orthogonal, locally stationary processes.
Pintore & Holmes, 2005, Fourier and Karhunen-Loeve expansions
Higdon & Swall, 1998, 2000, Gaussian moving averages or “process convolution” model
Nychka, Wikle & Royle, 2002. Wavelet expansion.
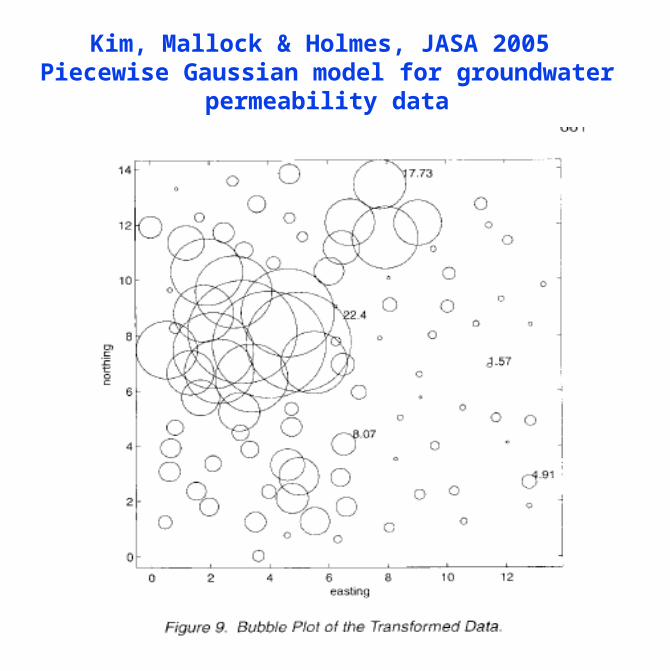
Kim, Mallock & Holmes, JASA 2005 Piecewise Gaussian model for groundwater
permeability data

QuickTime™ and a decompressor
are needed to see this picture.
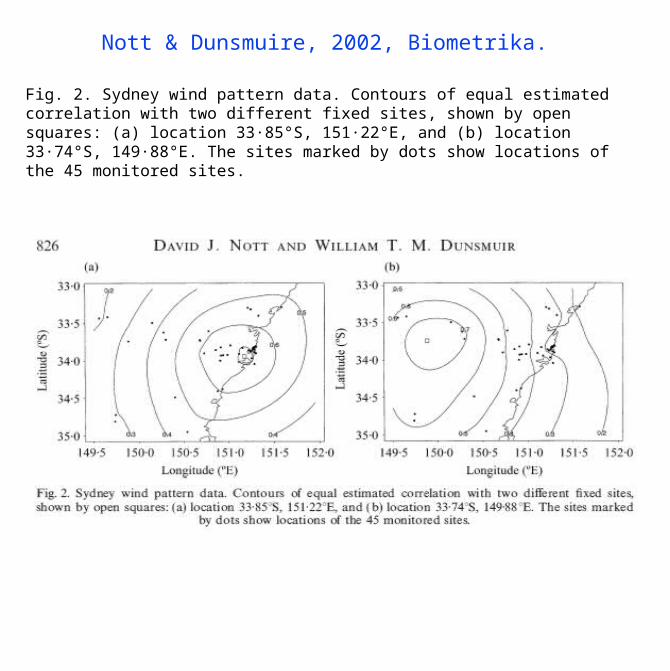
Fig. 2. Sydney wind pattern data. Contours of equal estimated correlation with two different fixed sites, shown by open squares: (a) location 33·85°S, 151·22°E, and (b) location 33·74°S, 149·88°E. The sites marked by dots show locations of the 45 monitored sites.
Nott & Dunsmuire, 2002, Biometrika.

QuickTime™ and a decompressor
are needed to see this picture.
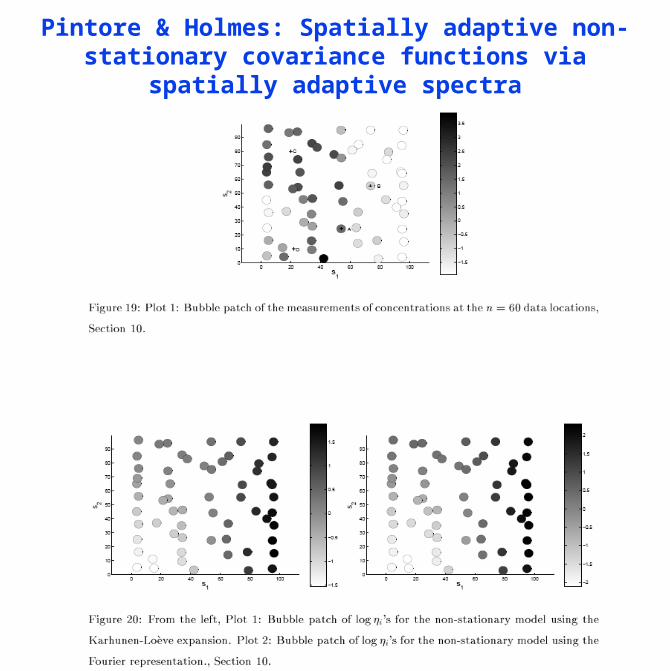
Pintore & Holmes: Spatially adaptive non-stationary covariance functions via spatially adaptive spectra

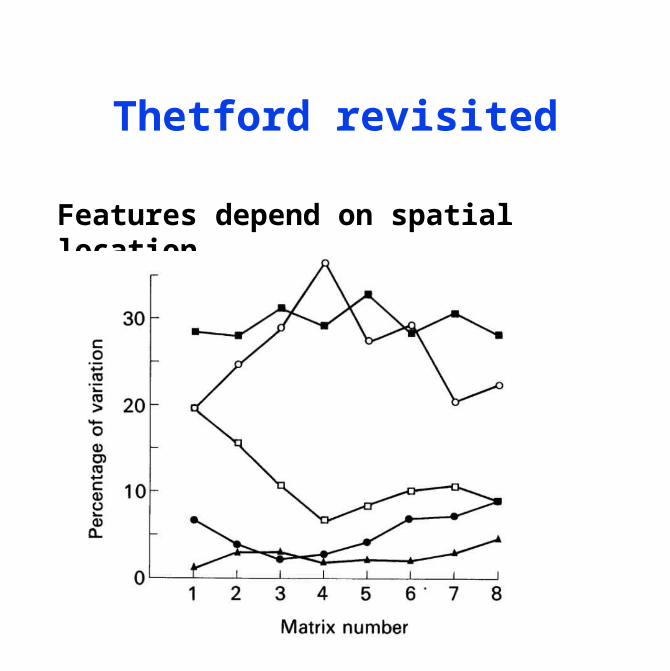
Thetford revisited
Features depend on spatial location
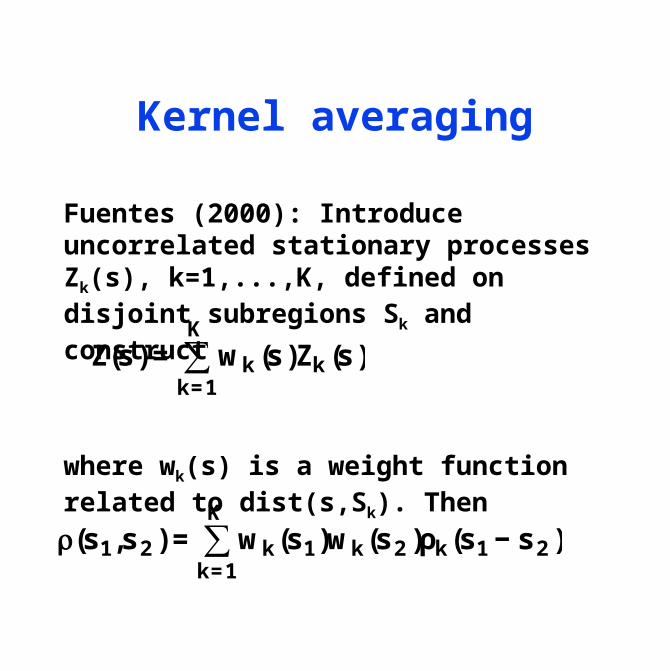
Kernel averaging
Fuentes (2000): Introduce uncorrelated stationary processes Zk(s), k=1,...,K, defined on disjoint subregions Sk and construct
where wk(s) is a weight function related to dist(s,Sk). Then
€
Z(s) = wk (s)Zk (s)k=1
K
∑
€
ρ(s1,s2 ) = wk(s1)wk(s2 )ρkk=1
K
∑ (s1 − s2 )
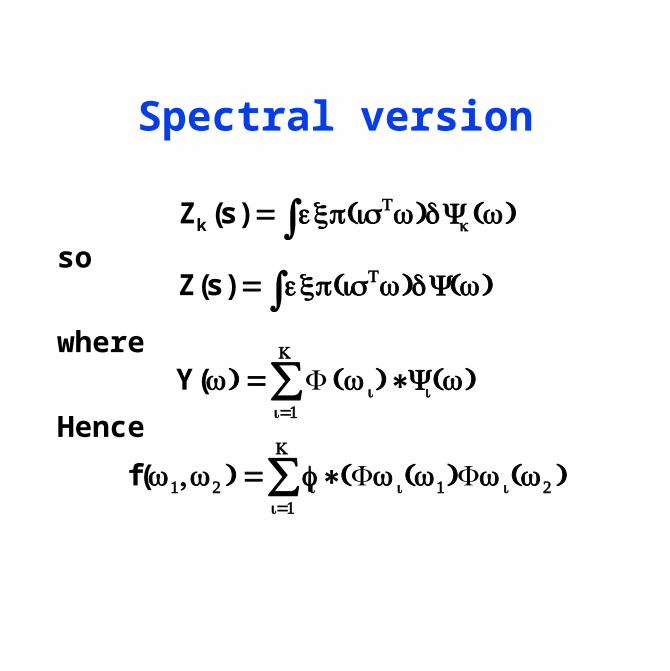
Spectral version
so
where
Hence
Zk (s) = exp(isTω)dYk∫ (ω)
Z(s) = exp(isTω)dY(ω)∫
Y(ω) = F (wi )∗Yi (ω)
i=1
K
∑
f(ω1,ω2 ) = fi
i=1
K
∑ ∗(F wi (ω1)F wi (ω2 )
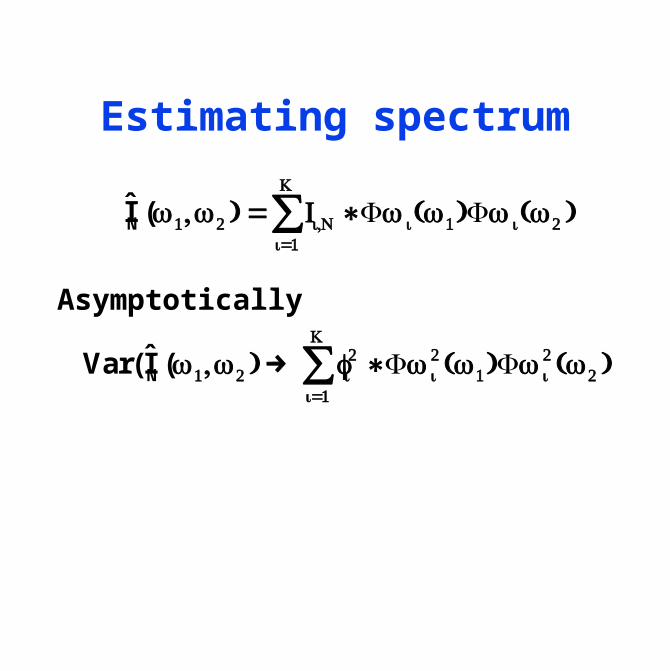
Estimating spectrum
Asymptotically
IN (ω1,ω2 ) = Ii,N ∗F wi (ω1)F wi (ω2 )
i=1
K
∑
Var(IN (ω1,ω2 ) → fi
2 ∗F wi2 (ω1)F wi
2 (ω2 )i=1
K
∑
Details
K = 9; h = 687 km
Mixture of Matérn spectra
w(u) =12π
1−u
2
h2
⎛
⎝⎜
⎞
⎠⎟ , 0 ≤ u ≤h
fi (ω) =φi (α i2 + ω 2 )−νi−1

An example
QuickTime™ and aTIFF (LZW) decompressor
are needed to see this picture.
Models-3 output, 81x87 grid, 36km x 36km. Hourly averaged nitric acid concentration week of 950711.
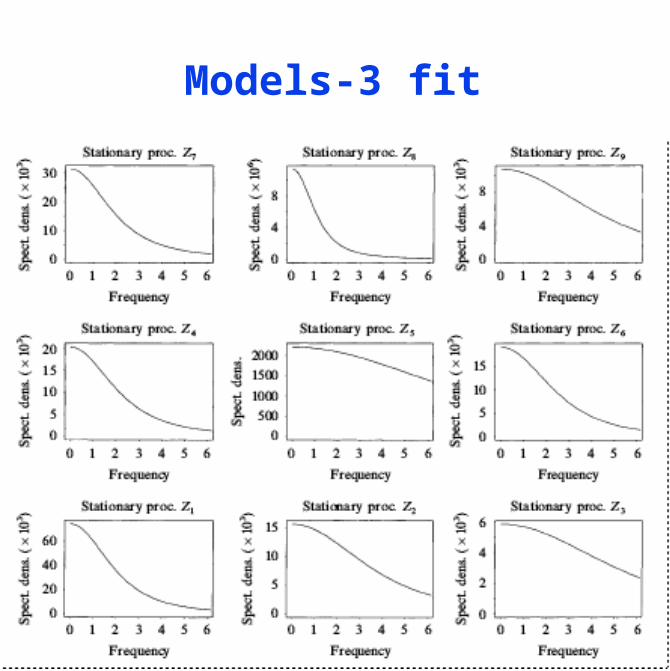
Models-3 fit
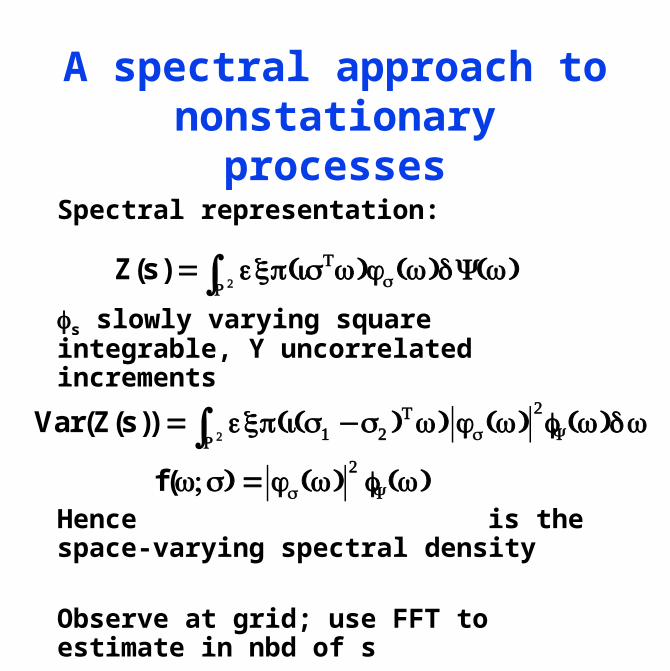
A spectral approach to nonstationary processes
Spectral representation:
s slowly varying square integrable, Y uncorrelated increments
Hence is the space-varying spectral density
Observe at grid; use FFT to estimate in nbd of s
Z(s) = exp(isTω)φs (ω)dY(ω)R2∫
Var(Z(s)) = exp(i(s1 −s2 )Tω) φs (ω)
2
R2∫ fY (ω)dω
f(ω;s) = φs (ω)2fY (ω)
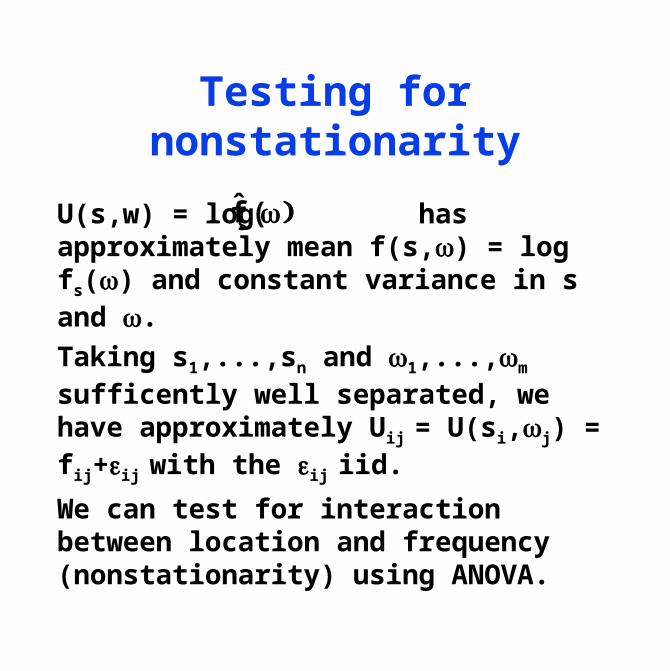
Testing for nonstationarity
U(s,w) = log has approximately mean f(s,ω) = log fs(ω) and constant variance in s and ω.
Taking s1,...,sn and ω1,...,ωm sufficently well separated, we have approximately Uij = U(si,ωj) = fij+ij with the ij iid.
We can test for interaction between location and frequency (nonstationarity) using ANOVA.
fs (ω)
Details
The general model has
The hypothesis of no interaction (ij=0) corresponds to additivity on log scale:
(uniformly modulated process:
Z0 stationary)
Stationarity corresponds to
Tests based on approx 2-distribution (known variance)
EUij =μ + α i + β j + ij
fs (ω) =c2 (s)f(ω)
Z(s) =c(s)Z0 (s)
H0 : EUij =μ +β j
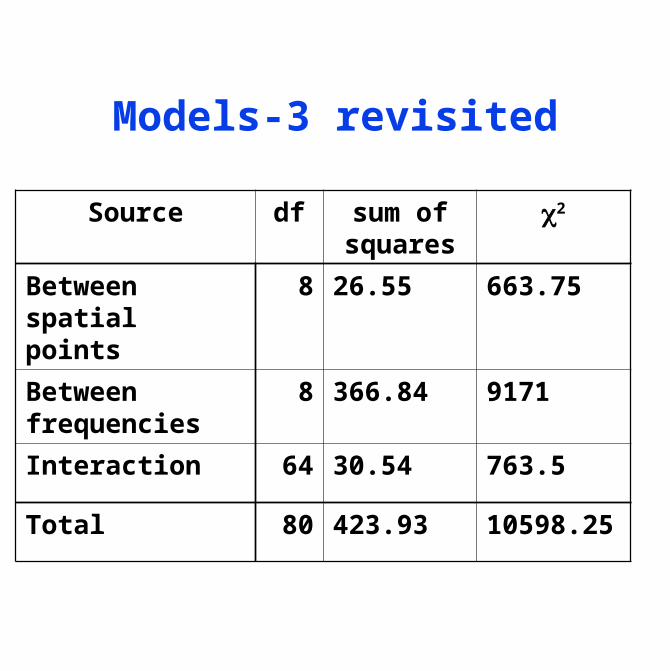
Models-3 revisited
Source df sum of squares
2
Between spatial points
8 26.55 663.75
Between frequencies
8 366.84 9171
Interaction 64 30.54 763.5
Total 80 423.93 10598.25
Moving averages
A simple way of constructing stationary sequences is to average an iid sequence .
A continuous time counterpart is , where is a random
measure which is stationary and assigns independent random variables to disjoint sets, i.e., has stationary and independent increments.
Xi = bjξi−jj∑
Xt = b(t−s)ξ(ds)∫

Lévy-Khinchine
ν is the Lévy measure, and t is the Lévy process. We can construct it from a Poisson measure H(du,ds) on R2 with intensity E(H(du,ds))=ν(du)ds and a standard Brownian motion Bt as
E eiωξt( )=exp{itω−tω2σ2 /2+t eiωu−1( )∫ ν(du)
ξt =μt+σBt+ uH(du,ds)(0,t]×R∫∫
Examples
Brownian motion with drift: t~N(μt,2t)ν(du)=0.
Poisson process: t~Po(t)μ=2=0, ν(du)={1}(du)
Gamma process: t~(αt,β)μ=2=0, ν(du)=αe-βu1(u>0)du/u
Cauchy process:μ=2=0, ν(du)=βu-2du/π

Spatial moving averages
We can replace R for t with R2 (or a general metric space)
We can replace R for s with R2 (or a general metric space)
We can replace b(t-s) by bt(s) to relax stationarity
We can let the intensity measure for H be an arbitrary measure ν(ds,du)
Gaussian moving averages
Higdon (1998), Swall (2000):
Let be a Brownian motion without drift, and . This is a Gaussian process with correlation
Account for nonstationarity by letting the kernel b vary with location:
€
X(s) = b(s − u)dξ (u)R2∫
€
ρ(d) = b(u)R2∫ b(u − d)du.
€
ρ(s1,s2 ) = bs 1R2∫ (u)bs 2(u)du
Details
yields an explicit covariance function which is squared exponential with parameter changing with spatial location.
The prior distribution describes “local ellipses,” i.e., smoothly changing random kernels.
bs (u) =exp(−12 (s −u)TΣu(s −u))
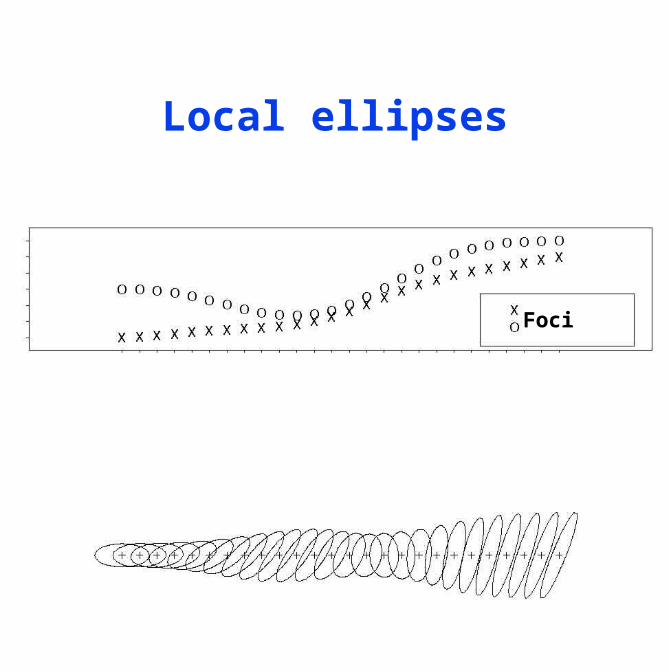
Local ellipses
Foci
Prior parametrization
Foci chosen independently Gaussian with isotropic squared exponential covariance
Another parameter describes the range of influence of a given ellipse. Prior gamma.
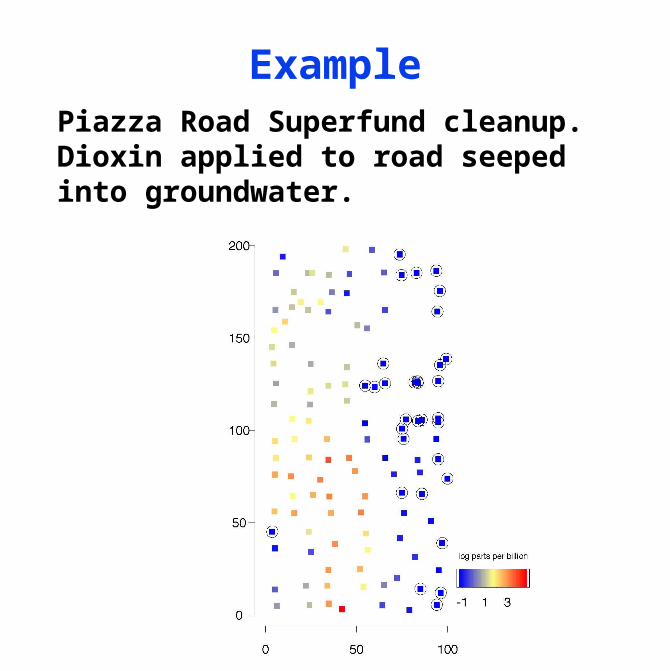
ExamplePiazza Road Superfund cleanup. Dioxin applied to road seeped into groundwater.
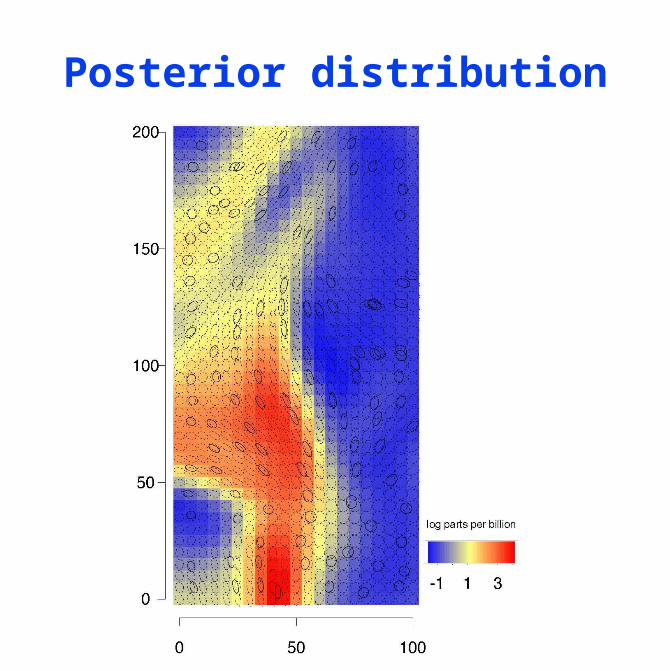
Posterior distribution