new perspectives in the study of swarming systems cristián huepe unaffiliated nsf grantee -...
TRANSCRIPT

New Perspectives in the Study New Perspectives in the Study of Swarming Systemsof Swarming Systems
CristiCristiáán Huepen Huepe Unaffiliated NSF Grantee - Chicago, IL. USAUnaffiliated NSF Grantee - Chicago, IL. USA
CollaboratorsCollaborators M. Aldana and H. Larralde – UNAM, Mexico M. Aldana and H. Larralde – UNAM, Mexico
V. M. Kenkre and V. Dossetti – UNM, USAV. M. Kenkre and V. Dossetti – UNM, USAA. E. Turgut – Mid. East Tech U., TurkeyA. E. Turgut – Mid. East Tech U., TurkeyF. Cucker – City U of Hong Kong, China F. Cucker – City U of Hong Kong, China
This work was supported by the National Science Foundation under Grant No. DMS-0507745.
________________________________________________________________
OutlineOutline
Overview of Swarming SystemsOverview of Swarming Systems– Computer Science – BiologyComputer Science – Biology– Appl. Math & Physics – EngineeringAppl. Math & Physics – Engineering
New PerspectivesNew Perspectives– Additional quantitiesAdditional quantities– Lessons from minimal systemsLessons from minimal systems– Network approachNetwork approach
Developing connections to real systemsDeveloping connections to real systems– New swarming robotsNew swarming robots– New data on Biological swarmsNew data on Biological swarms
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

OutlineOutline
Overview of Swarming SystemsOverview of Swarming Systems– Computer Science – BiologyComputer Science – Biology– Appl. Math & Physics – EngineeringAppl. Math & Physics – Engineering
New PerspectivesNew Perspectives– Additional quantitiesAdditional quantities– Lessons from minimal systemsLessons from minimal systems– Network approachNetwork approach
Developing connections to real systemsDeveloping connections to real systems– New swarming robotsNew swarming robots– New data on Biological swarmsNew data on Biological swarms
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008
Overview of Swarming Systems ResearchOverview of Swarming Systems Research
– – Computer ScienceComputer Science
Craig ReynoldsCraig Reynolds (US R&D Sony Computer Entertainment) (US R&D Sony Computer Entertainment) Xiaoyuan TuXiaoyuan Tu (Graphics Lab, U of Toronto - AiLive Inc ) (Graphics Lab, U of Toronto - AiLive Inc ) Michael GirardMichael Girard (Comp. Graph. Research, Ohio State U) (Comp. Graph. Research, Ohio State U) Helmut Lorek, Matthew White Helmut Lorek, Matthew White (U of Oldenburg)(U of Oldenburg) Jessica HodginsJessica Hodgins (GVU, Georgia Inst. of Tech.) (GVU, Georgia Inst. of Tech.) Hiroki SayamaHiroki Sayama (SUNY Binghamton) (SUNY Binghamton)
– – BiologyBiology
Iain CouzinIain Couzin (Oxford/Princeton) (Oxford/Princeton) Stephen SimpsonStephen Simpson (U of Sidney) (U of Sidney) Julia Parrish,Julia Parrish, Daniel GrDaniel Grünbaumünbaum (U of Washington) (U of Washington) Steven ViscidoSteven Viscido (U of South Carolina) (U of South Carolina) Leah Edelstein-KeshetLeah Edelstein-Keshet (U of British Columbia) (U of British Columbia) Charlotte HemelrijkCharlotte Hemelrijk (U of Groningen) (U of Groningen)
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008
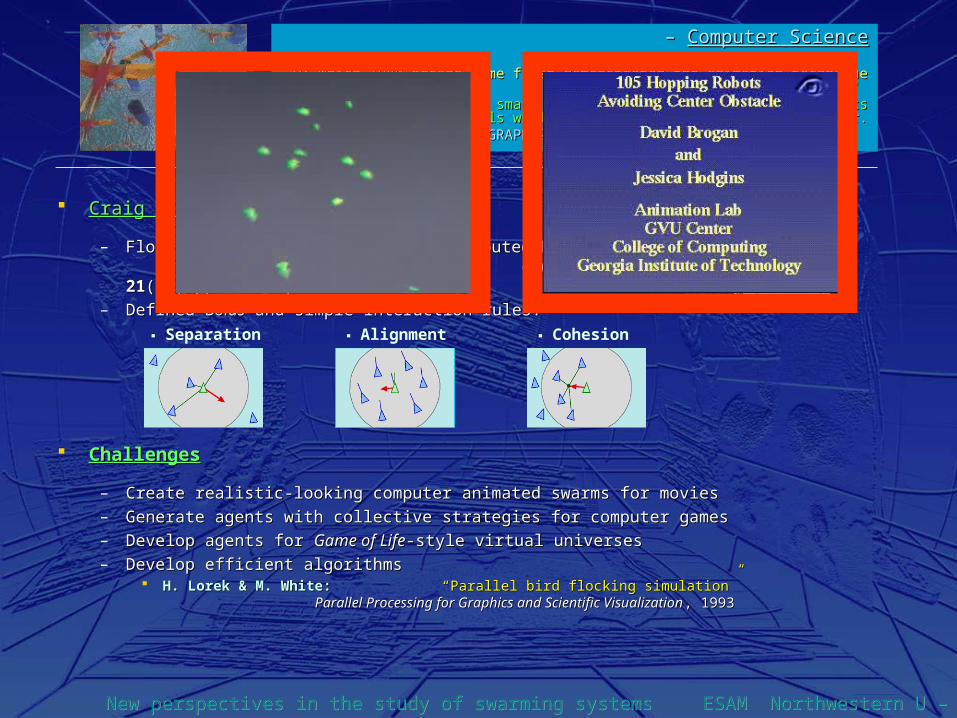
Craig W. Reynolds seminal workCraig W. Reynolds seminal work
– Flocks, Herds, and Schools: A Distributed Behavioral Model Flocks, Herds, and Schools: A Distributed Behavioral Model Computer GraphicsComputer Graphics, , 2121(4), pp. 25-34, 1987(4), pp. 25-34, 1987
– Defined Defined BoidsBoids and simple interaction rules: and simple interaction rules:
ChallengesChallenges
– Create realistic-looking computer animated swarms for moviesCreate realistic-looking computer animated swarms for movies– Generate agents with collective strategies for computer gamesGenerate agents with collective strategies for computer games– Develop agents for Develop agents for Game of LifeGame of Life-style virtual universes-style virtual universes– Develop efficient algorithmsDevelop efficient algorithms
H. Lorek & M. White:H. Lorek & M. White: “Parallel bird flocking simulation”“Parallel bird flocking simulation” Parallel Processing for Graphics and Scientific VisualizationParallel Processing for Graphics and Scientific Visualization , 1993, 1993
– – Computer ScienceComputer Science
Q: Which 1980 arcade game first demonstrated the animation technique now Q: Which 1980 arcade game first demonstrated the animation technique now known as "flocking?"known as "flocking?"
A:A: Rip-Off … Rip-Off … It featured smart enemies that sought out target objects and It featured smart enemies that sought out target objects and could change goals while avoiding collisions with each other.could change goals while avoiding collisions with each other.
-- Trivia slide, SIGGRAPH 2001 Electronic Pre-show (Tim Skelly)-- Trivia slide, SIGGRAPH 2001 Electronic Pre-show (Tim Skelly)
▪ Separation ▪ Alignment ▪ Cohesion
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

Overview of Swarming Systems ResearchOverview of Swarming Systems Research
– – Computer ScienceComputer Science
Craig ReynoldsCraig Reynolds (US R&D Sony Computer Entertainment) (US R&D Sony Computer Entertainment) Xiaoyuan TuXiaoyuan Tu (Graphics Lab, U of Toronto - AiLive Inc ) (Graphics Lab, U of Toronto - AiLive Inc ) Michael GirardMichael Girard (Comp. Graph. Research, Ohio State U) (Comp. Graph. Research, Ohio State U) Helmut Lorek, Matthew White Helmut Lorek, Matthew White (U of Oldenburg)(U of Oldenburg) Jessica HodginsJessica Hodgins (GVU, Georgia Inst. of Tech.) (GVU, Georgia Inst. of Tech.) Hiroki SayamaHiroki Sayama (SUNY Binghamton) (SUNY Binghamton)
– – BiologyBiology
Iain CouzinIain Couzin (Oxford/Princeton) (Oxford/Princeton) Stephen SimpsonStephen Simpson (U of Sidney) (U of Sidney) Julia Parrish,Julia Parrish, Daniel GrDaniel Grünbaumünbaum (U of Washington) (U of Washington) Steven ViscidoSteven Viscido (U of South Carolina) (U of South Carolina) Leah Edelstein-KeshetLeah Edelstein-Keshet (U of British Columbia) (U of British Columbia) Charlotte HemelrijkCharlotte Hemelrijk (U of Groningen) (U of Groningen)
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

MotivationMotivation
– Similar swarming behavior observed in very different animal speciesSimilar swarming behavior observed in very different animal species– Fish schools & bird flocks can involve from a few individuals to several thousandsFish schools & bird flocks can involve from a few individuals to several thousands– Locust plagues can contain 10Locust plagues can contain 1099 individuals traveling thousands of kilometers individuals traveling thousands of kilometers
New experimentsNew experiments– International StarFlAG project involving 5 EU countriesInternational StarFlAG project involving 5 EU countries– Controlled lab experiments with fish tanks and insect arenasControlled lab experiments with fish tanks and insect arenas
ChallengesChallenges
– Understand the causes of swarming behaviorUnderstand the causes of swarming behavior– Reverse-engineerReverse-engineer the biological interactions the biological interactions– Control swarmsControl swarms– Study the higher-order computational capabilities of swarmsStudy the higher-order computational capabilities of swarms
I. Couzin:I. Couzin: “Collective minds”“Collective minds” Essay in Essay in NatureNature, Vol 445, February 2007, Vol 445, February 2007
– – BiologyBiology
"...and the thousands of fishes moved as a huge beast, piercing "...and the thousands of fishes moved as a huge beast, piercing the water. They appeared united, inexorably bound the water. They appeared united, inexorably bound
to a common fate. How comes this unity?" to a common fate. How comes this unity?" -- Anonymous, 17th century -- Anonymous, 17th century
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

Overview of Swarming Systems ResearchOverview of Swarming Systems Research
– – EngineeringEngineering
Richard MurrayRichard Murray (CALTECH) (CALTECH) Naomi LeonardNaomi Leonard (Princeton) (Princeton) Reza Olfati-SaberReza Olfati-Saber (Dartmouth College) (Dartmouth College) Ali JadbabaieAli Jadbabaie ( (U of U of Pennsylvania) Pennsylvania) Stephen MorseStephen Morse (Yale (Yale U U)) Kevin Lynch and Randy FreemanKevin Lynch and Randy Freeman (Northwestern U), (Northwestern U), Francesco BulloFrancesco Bullo (UCSB) (UCSB) Vijay KumarVijay Kumar (U of Pennsylvania) (U of Pennsylvania)
– – Applied Math & PhysicsApplied Math & Physics Tamás VicsekTamás Vicsek (Eötvös Loránd U), (Eötvös Loránd U), Chad Topaz, Andrea Bertozzi, Maria D’OrsognaChad Topaz, Andrea Bertozzi, Maria D’Orsogna (UCLA) (UCLA) Herbert LevineHerbert Levine (UCSD) (UCSD) Edward OttEdward Ott (U of Maryland) (U of Maryland) Bruno EckhardtBruno Eckhardt (U Marburg) (U Marburg) Maximino AldanaMaximino Aldana (UNAM) (UNAM) Udo ErdmannUdo Erdmann (Helmholtz Association), (Helmholtz Association), Hugues ChatéHugues Chaté (CEA-Saclay) (CEA-Saclay)
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

MotivationMotivation
– Groups of robots will be more effective than single robots forGroups of robots will be more effective than single robots for Deploying sensor networksDeploying sensor networks Carrying-out tasks in parallelCarrying-out tasks in parallel Micro-robotic applicationsMicro-robotic applications
New technologiesNew technologies
– Mini-robots by iRobot Mini-robots by iRobot (SwarmBot),(SwarmBot), LIS LIS (s-bot),(s-bot), EPFL EPFL (e-puck) …(e-puck) …– Underwater sensor robot networks Underwater sensor robot networks (N. Leonard, S. Ramp)(N. Leonard, S. Ramp)– Military technologyMilitary technology
ChallengesChallenges
– Develop control algorithms for groups of autonomous robots that areDevelop control algorithms for groups of autonomous robots that are DecentralizedDecentralized ScalableScalable RobustRobust
– Additional constrainsAdditional constrains Small processing powerSmall processing power Minimize amount of bandwidthMinimize amount of bandwidth Consider possible communication time-delaysConsider possible communication time-delays Limited communication (nearby neighbors, line-of-sight, direct contact) Limited communication (nearby neighbors, line-of-sight, direct contact)
– – EngineeringEngineering
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

Overview of Swarming Systems ResearchOverview of Swarming Systems Research
– – EngineeringEngineering
Richard MurrayRichard Murray (CALTECH) (CALTECH) Naomi LeonardNaomi Leonard (Princeton) (Princeton) Reza Olfati-SaberReza Olfati-Saber (Dartmouth College) (Dartmouth College) Ali JadbabaieAli Jadbabaie ( (U of U of Pennsylvania) Pennsylvania) Stephen MorseStephen Morse (Yale (Yale U U)) Kevin Lynch and Randy FreemanKevin Lynch and Randy Freeman (Northwestern U), (Northwestern U), Francesco BulloFrancesco Bullo (UCSB) (UCSB) Vijay KumarVijay Kumar (U of Pennsylvania) (U of Pennsylvania)
– – Applied Math & PhysicsApplied Math & Physics Tamás VicsekTamás Vicsek (Eötvös Loránd U), (Eötvös Loránd U), Chad Topaz, Andrea Bertozzi, Maria D’OrsognaChad Topaz, Andrea Bertozzi, Maria D’Orsogna (UCLA) (UCLA) Herbert LevineHerbert Levine (UCSD) (UCSD) Edward OttEdward Ott (U of Maryland) (U of Maryland) Bruno EckhardtBruno Eckhardt (U Marburg) (U Marburg) Maximino AldanaMaximino Aldana (UNAM) (UNAM) Udo ErdmannUdo Erdmann (Helmholtz Association), (Helmholtz Association), Hugues ChatéHugues Chaté (CEA-Saclay) (CEA-Saclay)
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

MotivationMotivation
– Understand essential components of swarming dynamicsUnderstand essential components of swarming dynamics
ModelsModels
– Agent-based algorithmsAgent-based algorithms Discrete timeDiscrete time Continuous time (ODEs)Continuous time (ODEs)
– Field-based algorithms (PDEs)Field-based algorithms (PDEs)
ChallengesChallenges
– Link to statistical mechanics, granular systems, and other agent dynamicsLink to statistical mechanics, granular systems, and other agent dynamics– Universality at phase transitions? Conserved quantities? Energy cascades? Universality at phase transitions? Conserved quantities? Energy cascades? – Can field equations be deduced from microscopic interactions?Can field equations be deduced from microscopic interactions?– What is the meaning of integro-differential PDE models?What is the meaning of integro-differential PDE models?– Symmetry breaking only captures initial homogeneous field perturbations (like Symmetry breaking only captures initial homogeneous field perturbations (like
Jeans instability, but no longer-time dynamics)Jeans instability, but no longer-time dynamics)– Field equations not well suited for zero-density regions (free boundary problems)Field equations not well suited for zero-density regions (free boundary problems)
– – Applied Math & PhysicsApplied Math & Physics
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008
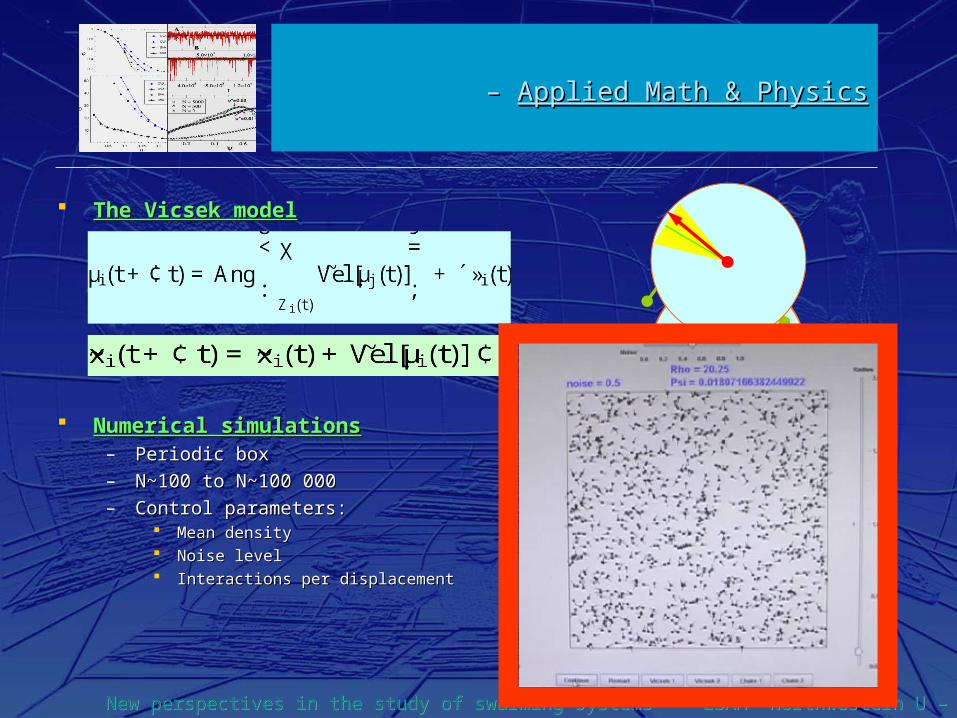
The Vicsek modelThe Vicsek model
Numerical simulationsNumerical simulations– Periodic boxPeriodic box– N~100 to N~100 000N~100 to N~100 000– Control parameters: Control parameters:
Mean densityMean density Noise levelNoise level Interactions per displacementInteractions per displacement
– – Applied Math & PhysicsApplied Math & Physics
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

Order parameterOrder parameter– Alignment Alignment – MagnetizationMagnetization
Main resultMain result– Second-order phase transition Second-order phase transition
at critical noise valueat critical noise value
– – The Vicsek ModelThe Vicsek Model
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

OutlineOutline
Overview of Swarming SystemsOverview of Swarming Systems– Computer Science – BiologyComputer Science – Biology– Appl. Math & Physics – EngineeringAppl. Math & Physics – Engineering
New PerspectivesNew Perspectives– Additional quantitiesAdditional quantities– Lessons from minimal systemsLessons from minimal systems– Network approachNetwork approach
Developing connections to real systemsDeveloping connections to real systems– New swarming robotsNew swarming robots– New data on Biological swarmsNew data on Biological swarms
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

OutlineOutline
Overview of Swarming SystemsOverview of Swarming Systems– Computer Science – BiologyComputer Science – Biology– Appl. Math & Physics – EngineeringAppl. Math & Physics – Engineering
New PerspectivesNew Perspectives– Additional quantitiesAdditional quantities– Lessons from minimal systemsLessons from minimal systems– Network approachNetwork approach
Developing connections to real systemsDeveloping connections to real systems– New swarming robotsNew swarming robots– New data on Biological swarmsNew data on Biological swarms
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

New PerspectivesNew Perspectives Additional quantitiesAdditional quantities
Degree of alignmentDegree of alignment (magnetization)(magnetization)::
Local density:Local density:
Distance to nearest neighbor:Distance to nearest neighbor:

Vicsek ModelVicsek Model
– Standard Vicsek Algorithm Standard Vicsek Algorithm (SVA)(SVA)
– Original Vicsek Algorithm Original Vicsek Algorithm (OVA)(OVA)
Grégoire & Chaté modelGrégoire & Chaté model (GCM) (GCM)
▪ ▪ Additional quantities Additional quantities Comparison of minimal modelsComparison of minimal models
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

SVASVA & & OVAOVA GCAGCA
▪ ▪ Additional quantities Additional quantities Comparison of minimal modelsComparison of minimal models

Observations:Observations:– OVA: larger finite-size effect than SVAOVA: larger finite-size effect than SVA– OVA & others: Unrealistically high local densities OVA & others: Unrealistically high local densities – Evidence of universal critical behavior at the phase transition?Evidence of universal critical behavior at the phase transition?
Analysis of cluster-size distributionAnalysis of cluster-size distribution
SVASVA GCAGCA
– Cumulative distribution of cluster sizes for N=8192, s=0.5, & mean density = 1/8Cumulative distribution of cluster sizes for N=8192, s=0.5, & mean density = 1/8
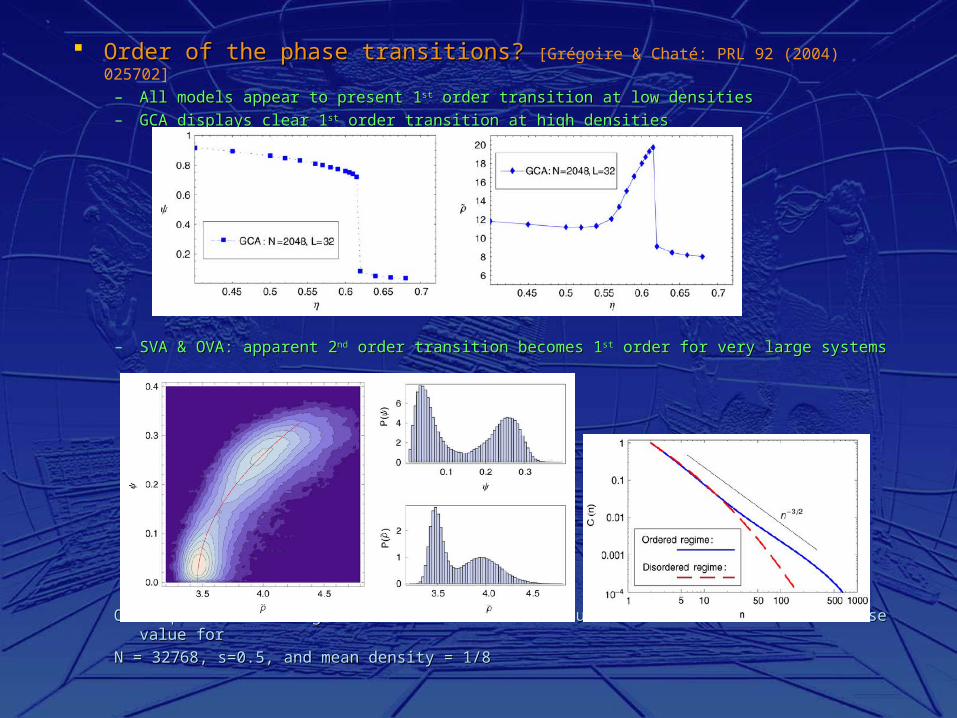
Order of the phase transitions? Order of the phase transitions? [Grégoire & Chaté: PRL 92 (2004) 025702]
– All models appear to present 1All models appear to present 1stst order transition at low densities order transition at low densities
– GCA displays clear 1GCA displays clear 1stst order transition at high densities order transition at high densities
– SVA & OVA: apparent 2SVA & OVA: apparent 2ndnd order transition becomes 1 order transition becomes 1stst order for very large systems order for very large systems
Order parameter histograms and distribution of cluster sizes at the critical noise value for Order parameter histograms and distribution of cluster sizes at the critical noise value for
N = 32768, s=0.5, and mean density = 1/8N = 32768, s=0.5, and mean density = 1/8

The Cucker-Smale (CS) model:The Cucker-Smale (CS) model:
– WithWith
– Convergence to non-zero initial condition dependant agent-speedConvergence to non-zero initial condition dependant agent-speed
CS with informed agents:CS with informed agents:
– DefiningDefining
– The system becomes simply:The system becomes simply:
New PerspectivesNew Perspectives Lessons from minimal systemsLessons from minimal systems

Analytical convergence resultsAnalytical convergence results
– Defining:Defining:
– We can prove:We can prove:

Numerical resultsNumerical results
– Convergence:Convergence:
– Final group velocityFinal group velocity Comparison CS informedComparison CS informed / / Detailed swarming modelDetailed swarming model
2 4 6 8 1 0 1 2 1 4x 02
4
6
8
1 0
1 2
1 4
v 0

New PerspectivesNew Perspectives Network approachNetwork approach
Motivation: We replaceMotivation: We replace – Moving agents by fixed nodes.Moving agents by fixed nodes.
– EffectiveEffective long-range interactions by a few long-range connections. long-range interactions by a few long-range connections.
Each node linked with probability Each node linked with probability 1-p1-p to one of its K neighbors and to one of its K neighbors and pp to any other node.to any other node.
Small-world effect:Small-world effect:– 1% of long range connections1% of long range connections
– Phase with long-range order appearsPhase with long-range order appears
p = 0.1

Mean-field approximationMean-field approximation– Vicsek time-step and order parameter:Vicsek time-step and order parameter:
– Order parameter:Order parameter:
The calculation requires:The calculation requires:– Expressing PDFs in terms Expressing PDFs in terms
of momentsof moments– A random-walk analogyA random-walk analogy– Central limit theoremCentral limit theorem– Expansion about theExpansion about the
phase transition pointphase transition point
22
2 sincos
dPdP
2
2
;;1;
dtPPtPtP KK
Analytic SolutionAnalytic Solution

Agents are repositioned randomly at every time-stepAgents are repositioned randomly at every time-step Comparison of numerical and analytic solutionsComparison of numerical and analytic solutions
N = 20000, K = 5 (top) & K = 20 (bottom)N = 20000, K = 5 (top) & K = 20 (bottom)
Vicsek noiseVicsek noise Chate noiseChate noise
The randomized position caseThe randomized position case
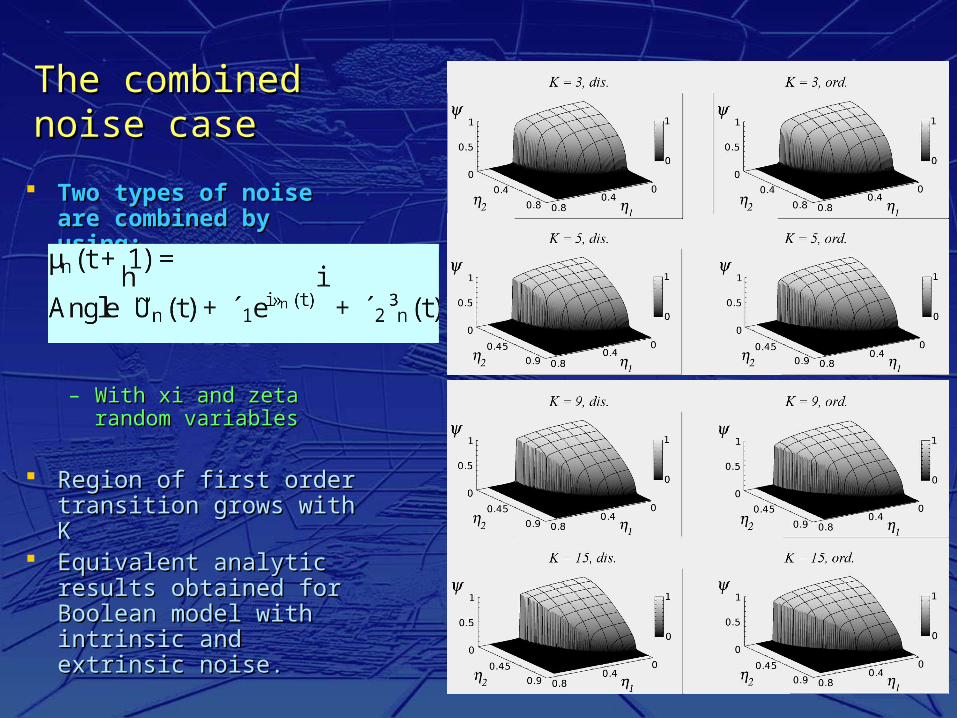
Two types of noise are Two types of noise are combined by using:combined by using:
– With xi and zeta With xi and zeta random variablesrandom variables
Region of first order Region of first order transition grows with Ktransition grows with K
Equivalent analytic Equivalent analytic results obtained for results obtained for Boolean model with Boolean model with intrinsic and extrinsic intrinsic and extrinsic noise.noise.
The combined The combined noise casenoise case

OutlineOutline
Overview of Swarming SystemsOverview of Swarming Systems– Computer Science – BiologyComputer Science – Biology– Appl. Math & Physics – EngineeringAppl. Math & Physics – Engineering
New PerspectivesNew Perspectives– Additional quantitiesAdditional quantities– Lessons from minimal systemsLessons from minimal systems– Network approachNetwork approach
Developing connections to real systemsDeveloping connections to real systems– New swarming robotsNew swarming robots– New data on Biological swarmsNew data on Biological swarms
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

OutlineOutline
Overview of Swarming SystemsOverview of Swarming Systems– Computer Science – BiologyComputer Science – Biology– Appl. Math & Physics – EngineeringAppl. Math & Physics – Engineering
New PerspectivesNew Perspectives– Additional quantitiesAdditional quantities– Lessons from minimal systemsLessons from minimal systems– Network approachNetwork approach
Developing connections to real systemsDeveloping connections to real systems– New swarming robotsNew swarming robots– New data on Biological swarmsNew data on Biological swarms
New perspectives in the study of swarming systems New perspectives in the study of swarming systems ESAM Northwestern U – 10/03/2008 ESAM Northwestern U – 10/03/2008

The KOBOT systemThe KOBOT system– Developed at the KOVAN research lab of the Department of Computer Engineering Developed at the KOVAN research lab of the Department of Computer Engineering
(Middle East Technical University, Ankara, Turkey) for swarm robotic studies(Middle East Technical University, Ankara, Turkey) for swarm robotic studies– Relative positions measured by eight infrared sensorsRelative positions measured by eight infrared sensors– Directions measured and broadcasted using digital compass moduleDirections measured and broadcasted using digital compass module
Physical simulator currently used to study large systems of KOBOTsPhysical simulator currently used to study large systems of KOBOTs
New PerspectivesNew Perspectives Swarming robotsSwarming robots

Saturation in KOBOT radio communication implies direct analogy to random Saturation in KOBOT radio communication implies direct analogy to random network inputs for angular interactionsnetwork inputs for angular interactions
““Stiff-vectorial” network model:Stiff-vectorial” network model:
Comparison of robot dynamics and analytic resultsComparison of robot dynamics and analytic results

New PerspectivesNew Perspectives New data on biological swarmsNew data on biological swarms
New experimental data may challenge our New experimental data may challenge our assumptionsassumptions
E.g. 1)E.g. 1) Starling in flight: S T A R F L A GStarling in flight: S T A R F L A G
E.g. 2)E.g. 2) Cannibalistic interactions in crickets Cannibalistic interactions in crickets and locustand locust

… … FinFin