nakagawa masafumi : [email protected] institute of technology panel on 3d data...
TRANSCRIPT
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
Panel on 3D data collection and reconstruction
Chair: Masafumi Nakagawa, Shibaura Institute of Technology
Thursday, 12th, 13:30-14:30
Sander Oude Elberink, University of Twente (via Adobe)
Martin Tamke, CITA, KADK (via Adobe)
Alain Lapierre, Bentley
Susanne Becker, Stuttgart University
The Royal Danish Academy of Fine Arts, Schools of Architecture, Design and Conservation
(3D reconstruction)
(BIM, Indoor localization)
(3D modeling and design)
(Laser scanning, 3D reconstruction)
(3D modeling, Seamless positioning)

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
Panel on 3D data collection and reconstruction
What is the biggest challenge in Indoor 3D data collection and reconstruction (2014-2020)
- Question 1
- Question 2
- Question 3
- Questions from audiences
- Introduction
10 min
10 min
10 min
15 min
5 min
- Summary 10 min

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
Indoor mapping and modeling (IMM)
Sensors
Devices
Data structures
Acquisition
Modeling
Navigation
Visualization
Applications
Legal Issues and StandardsAlgorithms
Solving problems in one field of IMM benefits other fields of IMM
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
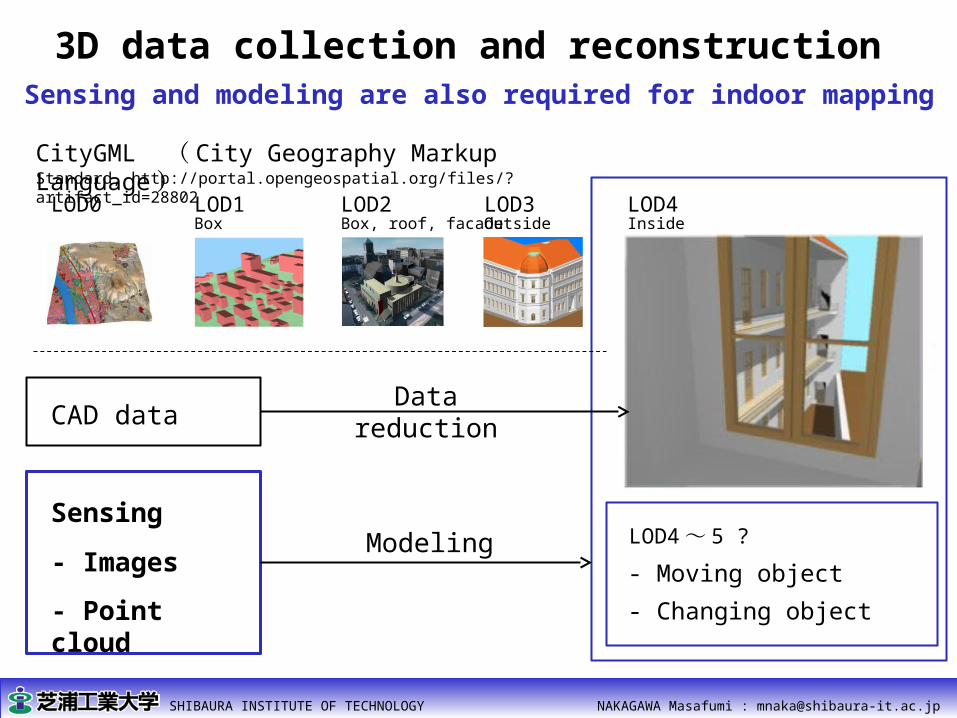
3D data collection and reconstruction Sensing and modeling are also required for indoor mapping
CAD data
CityGML ( City Geography Markup Language )
LOD1 LOD2 LOD3 LOD4LOD0Box Box, roof, facade Outside Inside
Standard, http://portal.opengeospatial.org/files/?artifact_id=28802
- Point cloud
Data reduction
Modeling LOD4 ~ 5 ?
- Moving object
- Changing object
- Images
Sensing

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
Point based rendering + spatial interpolation
Improved “point cloud” to be used as “a panorama image”
INPUT ( colored points )
OUTPUT ( colored points )
Side looking
Transparent effect
“Near” from a viewpoint = Sparse points“Far” from a viewpoint = Dense points
Near-far problem
Hidden points are visible among near-side points

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
3D scanned “Gunkanjima” with Terrestrial LiDAR
VZ-400 ( RIE
GL )
800 million pts, 65 view points
Data source : - Keisoku Research Consultant. Co.,ltd.- Nagasaki University
- Nagasaki CityRendering : - Shibaura Institute of Tech.

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
PROBLEMS IN INDOOR MAPPING AND MODELLING
Security and levels of access
Privacy
Copyright
The diversity of indoor
environments
Unification of outdoor and
indoor models
Gaming
Industrial applications
Natural description of
indoor environments
Augmented systems
Indoor modelling for
crisis response
Optimal routing
Navigation queries and
multiplicity of targets
Travelling imperatives
Automated space
subdivision
Navigation models
Real-time decision support
Discrete vs continuous navigation
models
Real-time change
visualization
Complexity visualization
Aural cues
PoI and landmarks strategies
Web and mobile devices
Real-time modelling
Dynamic abstraction
Discovering the context of
space
Diversity of Indoor
Environments
Software tool
Integration with GIS/BIM
Sensor fusion
Mobility
Real-time acquisition of
dynamic environments
Variable occupancy, automated
feature removal
Variable lighting
conditions
Learning the composition of
space
Acquisition and Sensors
Existing problems
Emerging problems
Data Structures
and Modelling
Visualization Navigation ApplicationsLegal Issues
and Standards

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
Objectives
Still camera, Video camera, Stereo, Tablet PC, Terrestrial scanner, Mobile scanner, etc.
①The best device for data acquisition ?
Real-time acquisition of dynamic environments,
②Real-time processing is required ?
Professionals vs. Cloud sourcing vs. Full-automation
③The best data collector and modeler ?
Real-time modelling
Dynamic abstraction
Discovering the context of
space
Diversity of Indoor
Environments
Software tool
Integration with GIS/BIM
Sensor fusion
Mobility
Real-time acquisition of
dynamic environments
Variable occupancy, automated
feature removal
Variable lighting
conditions
Learning the composition of
space
Acquisition and Sensors
Data Structures
and Modelling
Real-time modeling, Dynamic abstraction
Accuracy, Cost, etc.
Cost, Reliability, Integrity, etc.
What is the biggest challenge in Indoor 3D data collection and reconstruction (2014-2020)
Discovering the context of space
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
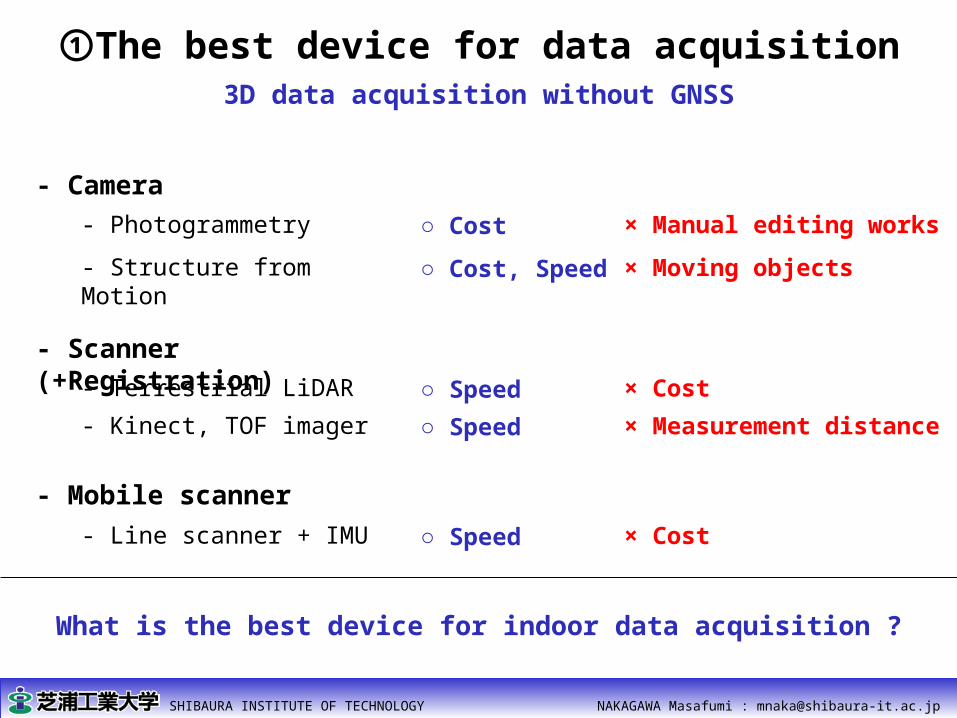
①The best device for data acquisition3D data acquisition without GNSS
- Scanner (+Registration)
- Camera
- Mobile scanner
- Photogrammetry
- Structure from Motion
- Terrestrial LiDAR
- Kinect, TOF imager
- Line scanner + IMU
× Manual editing works
× Moving objects
× Cost
× Measurement distance
× Cost
○ Cost
○ Cost, Speed
○ Speed
○ Speed
○ Speed
What is the best device for indoor data acquisition ?

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
①The best device for data acquisition
Sander
Martin
Alain
Susanne
What is the best device for indoor data acquisition ?
- Knowledge and indoor traces
- Depends on the targeted tasks, required fidelity/accuracy and costs.
- 3d scannner, potentially lightweight Lidar
- Currently: Terrestrial laser scanner
- For maintenance/operation purposes, panoramic photos might be sufficient.- For navigation, panoramic photos and/or Laser Scanner.
- For fidelity/measurement, combination of Laser Scanner (today static, future mobile) and Photos.
- Future (after 2014?): mobile devices (laser scanner). A device that someone can carry in their hand, on their head etc.
- Reason: currently the registration of mobile acquired point/image data is not good enough.

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
②Real-time processingReal-time processing is required ?
- Scene
- Applications
- Objects
- BIM- LBS
- Public space- Work space
- Passageway
- Autonomous robots
Station, Shopping mall, Exhibition hall, AirportFactory/Plant, Office, School/University
- Private space Your house
- Shopping mall
- Room Wall, Floor, Ceiling, Window, Table, Chair, Electric appliances, etc.
Signboard, Goods, Price tags, etc.Wall, Floor, Ceiling, Window, Walker, etc.
Infrastructure managementRoute planning, Navigation, Dynamic abstractionNavigation, Dynamic environment recognition
What is your interested real-time processing application(s) ?
- Factory Machine, Parts, Pipeline, etc.

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
②Real-time processing
Sander
Martin
Alain
Susanne
What is your interested real-time processing application(s) ?
- Real-time acquisition and modeling of dynamic environments
- For augmented reality, need to register in real-time the reality with the virtual model
- Detection of spaces and 3d objects and their semantics
- Route planning, evacuations.
For evacuations it is necessary to capture the current situation, and adapt to that. So a fast, post event dataset is required.
- During construction, progress monitoring and last minute changes.

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
③The best data collector and modelerProfessionals vs. Cloud sourcing vs. Full-automation
- Cloud sourcing
- Professionals
- Full-automation
○ Reliability× Resource
○ Resource× Reliability
○ Speed
→ Tools, Software, Freeware ?
→ Cost ?
× Integrity→ Software, Algorithm ?
Who is the best data collector and modeler ?
(e.g. OpenStreetMap)
# Indoor field is larger than outdoor
# Volunteers are nonprofessionals
# 100 % success rate ?

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
③The best data collector and modeler
Sander
Martin
Alain
Susanne
Who is the best data collector and modeler ?
- Automatic modeling from crowd sourced data
- Depends on disciplines and user needs. Being a software provider, we are aiming at providing the best software, but the competition and open source community is doing a great job too. Crowd sourcing could apply for less specialized and rigorous tasks.
- today: Professional users
- The one that best fits the users' needs. How well are the users' needs defined? Maybe the user can best process the data, if he/she is equipped with a variety of interactive tools.
- future: algorithms augmented by Professional users

NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
Questions from audiences
Still camera, Video camera, Stereo, Tablet PC, Terrestrial scanner, Mobile scanner, etc.
①The best device for data acquisition ?
Real-time acquisition of dynamic environments,
②Real-time processing is required ?
Professionals vs. Cloud sourcing vs. Full-automation
③The best data collector and modeler ?
Real-time modelling
Dynamic abstraction
Discovering the context of
space
Diversity of Indoor
Environments
Software tool
Integration with GIS/BIM
Sensor fusion
Mobility
Real-time acquisition of
dynamic environments
Variable occupancy, automated
feature removal
Variable lighting
conditions
Learning the composition of
space
Acquisition and Sensors
Data Structures
and Modelling
Real-time modeling, Dynamic abstraction
Accuracy, Cost, etc.
Cost, Reliability, Integrity, etc.
Discovering the context of space
What is the biggest challenge in Indoor 3D data collection and reconstruction (2014-2020)
NAKAGAWA Masafumi : [email protected] INSTITUTE OF TECHNOLOGY
Summary
Sander
Martin
Alain
Susanne
What is the biggest challenge in Indoor 3D data collection and reconstruction (2014-2020)
- Semantic interpretation
- Automated processing of huge volume of data (data transfer, feature extraction, semantic interpretation)
- Gaining comprehensive data with semantic information
- Comment