multidiscplinary control experiments based on the
TRANSCRIPT

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
Session 1526
MULTIDISCPLINARY CONTROL EXPERIMENTS BASED ON THEPROPORTIONAL-INTEGRAL-DERIVATIVE (PID) CONCEPT
Ravi P. Ramachandran, Raul Ordonez, Stephanie Farrell, Zenaida Otero Gephardt andHong Zhang
Faculty of Engineering, Rowan University, Glassboro, New Jersey 08028
Abstract - The hallmark of the newly configured Rowan College of Engineering undergraduate
program is multidisciplinary education with a laboratory emphasis. The development of a new
multidisciplinary control laboratory upholds our hallmark very well. We attempt to address the
demand of industry for acquiring control engineers (1) with a broad set of skills and a
comprehension of the diverse practical applications of control and (2) who can move across
rather artificial program boundaries with great ease. Multidisciplinary experiments that integrate
hands-on experience and software simulation are investigated. The experiments expose the
students to Proportional, Integral and Derivative (PID) control using a DC motor, engine speed
control apparatus and feedback process control. This enables electrical, mechanical and chemical
engineering students to learn the fundamental theory and physical implementation of various
types of control systems.
Introduction
The control systems laboratory is an integrated effort by the Faculty of Engineering at Rowan
University to configure a novel hands-on method of teaching Control Systems from a
multidisciplinary point of view. The Electrical, Mechanical and Chemical Engineering programs
are joining together to achieve this. Although Control is an interdisciplinary technology, there has
historically been a tendency for the different engineering departments to teach the subject from
their very own somewhat narrow perspective without any semblance of collaboration. This
project attempts to address the demand of industry for acquiring control engineers with a broad
set of skills and a comprehension of the diverse practical applications of Control [1]. This project
is in accordance with the multidisciplinary aim of our new programs and strives to meet the
requirements of industry in hiring control engineers who can move across rather artificial
program boundaries with great ease.

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
Goals and Objectives
Our aim is to accomplish the following:
1. Give students an exposure to the different aspects of control theory in the form of
multidisciplinary laboratory experiences that include electrical, mechanical, and process
control systems.
2. Ensure that our laboratory has an impact on a wide variety of courses in our curriculum.
3. Since digital technology is predominant in today’s industry, students should be exposed
to data acquisition and digital control for multidisciplinary purposes.
4. Integrate software simulation with hands-on laboratory work using MATLAB, its
associated SIMULINK package and C++ programming.
5. Expand student teamwork experience by having them work in groups on the laboratory
experiments.
6. Continue to improve written and oral communication skills of our students.
Description of Curriculum
Control education must integrate theory, hands-on experience and software simulation in a well
balanced fashion [1-8]. The laboratory will have a major impact on the control courses offered by
the Electrical, Mechanical and Chemical engineering departments and on other courses in the
curriculum that include the Engineering clinic, Fluid Mechanics, Mathematics for Engineering
Analysis, Digital Signal Processing and Digital Systems and Microprocessors. Our programs
include an interdisciplinary engineering clinic [9-12] every semester. Sharing many features in
common with the model for medical training, the clinic provides an atmosphere of faculty
mentoring in a hands-on, laboratory setting.
The control courses generally have three hours of laboratory per week in addition to two
to three hours of lectures. The curriculum in the control courses offered by the departments
include:
1. Basic system concepts: linearity, time-invariance, stability, frequency response, causality,
realizability, impulse response and transfer function (poles and zeros).
2. Mathematical modeling of physical systems: analogs between electrical, mechanical, fluid
and thermal systems and their circuit equivalence; differential equation description of

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
such systems and their analysis; Laplace transforms; block diagram algebra; signal flow
graphs.
3. Feedback: open loop and closed loop systems; pole placement; compensator design;
sensitivity analysis; steady-state error; performance criteria; proportional-integral-
derivative (PID) controllers.
4. Stability Analysis: Routh-Hurwitz criterion; root locus method; Nyquist criterion.
5. Frequency response analysis: Bode plots; gain and phase margins.
The basic differences in the lecture content of the courses lies in the emphasis on certain topics
and applications by the different departments. Electrical engineering students may see more
examples on circuits in the classroom while chemical engineers will see more examples on
process control. In the laboratory (common to all students), students will be exposed to a broad
range of applications of control theory. It is the experiments on PID control which are
summarized below.
Proportional-integral-derivative (PID) controllers
Figure 1: A general block diagram of a control system
A general block diagram of a control system is shown in Figure 1. All signals and system
functions are labeled as a function of the Laplace transform variable s [2]. The input and output
signals are denoted by X(s) and Y(s) respectively. The plant is denoted by G(s). The controller is
denoted by K(s) and the feedback loop has a system function H(s). The transfer function of the
system is given by T(s) = (K(s) G(s)) / ( 1 + K(s) G(s) H(s) ).
A PID controller has a system function K(s) = (K1 + K2s + K3/s) where K1 is the proportional
gain, K2 is the derivative gain and K3 is the integral gain. The popularity of PID controllers is due
“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
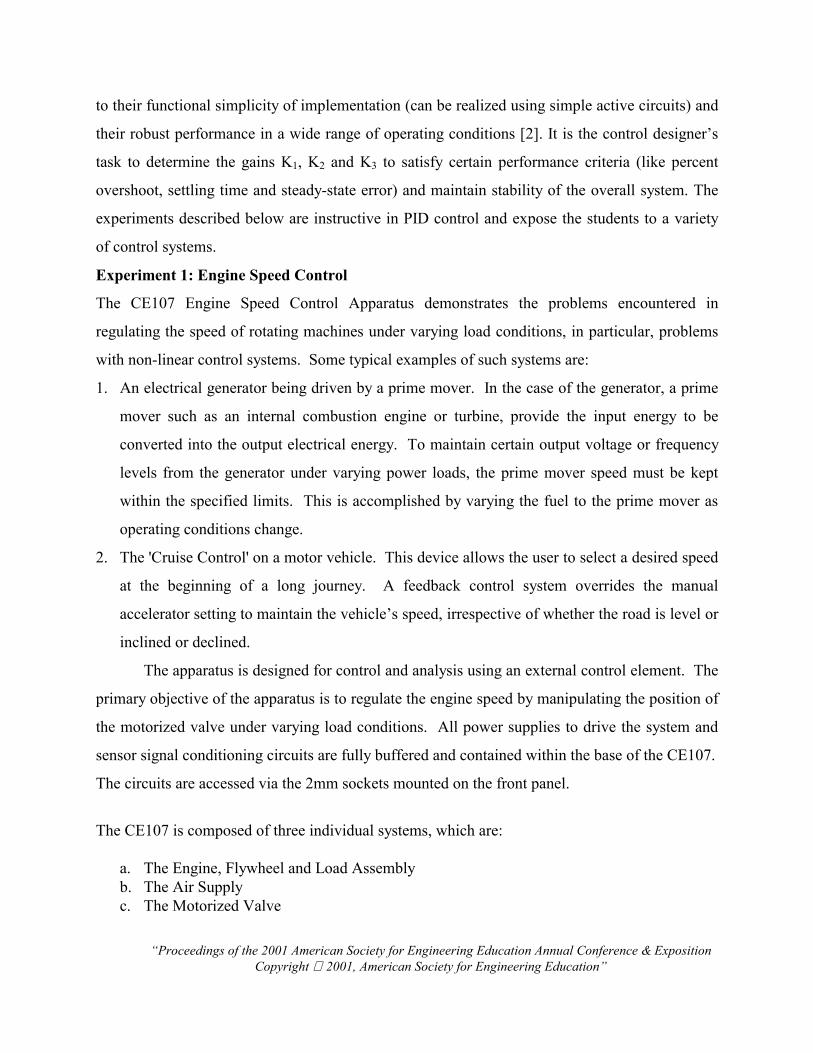
to their functional simplicity of implementation (can be realized using simple active circuits) and
their robust performance in a wide range of operating conditions [2]. It is the control designer’s
task to determine the gains K1, K2 and K3 to satisfy certain performance criteria (like percent
overshoot, settling time and steady-state error) and maintain stability of the overall system. The
experiments described below are instructive in PID control and expose the students to a variety
of control systems.
Experiment 1: Engine Speed Control
The CE107 Engine Speed Control Apparatus demonstrates the problems encountered in
regulating the speed of rotating machines under varying load conditions, in particular, problems
with non-linear control systems. Some typical examples of such systems are:
1. An electrical generator being driven by a prime mover. In the case of the generator, a prime
mover such as an internal combustion engine or turbine, provide the input energy to be
converted into the output electrical energy. To maintain certain output voltage or frequency
levels from the generator under varying power loads, the prime mover speed must be kept
within the specified limits. This is accomplished by varying the fuel to the prime mover as
operating conditions change.
2. The 'Cruise Control' on a motor vehicle. This device allows the user to select a desired speed
at the beginning of a long journey. A feedback control system overrides the manual
accelerator setting to maintain the vehicle’s speed, irrespective of whether the road is level or
inclined or declined.
The apparatus is designed for control and analysis using an external control element. The
primary objective of the apparatus is to regulate the engine speed by manipulating the position of
the motorized valve under varying load conditions. All power supplies to drive the system and
sensor signal conditioning circuits are fully buffered and contained within the base of the CE107.
The circuits are accessed via the 2mm sockets mounted on the front panel.
The CE107 is composed of three individual systems, which are:
a. The Engine, Flywheel and Load Assemblyb. The Air Supplyc. The Motorized Valve

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
Figure 2: Front Panel of CE107 Engine Speed Control Apparatus
Air Supply Valve: Modeling
We will begin by examining the valve that is used to supply air to the system. The valve input
operates an electric motor, which turns at a rate proportional to the input voltage. The equation
modeling the dynamics of the system is given by:
ugdtdx
1=
where x is the valve position, u is the input voltage, and g1 is the drive valve motor gain.
This system works by having the valve position adjust the tension F on a control spring,
which in turn acts upon a diaphragm in the valve. If the tension is increased, then additional air
flows through an inlet and through the main valve. This allows the outlet pressure on the valve
to increase. The outlet pressure Po, exerts an opposite force on the diaphragm which acts against
the input tension. When the control spring tension and outlet are in equilibrium the airflow
through the valve stabilizes.
Engine and Load: Modeling
The air from the valve applies a pressure Po to the engine piston. This applied force is
transformed into an engine torque τe at the engine crankshaft. This means that the engine torque
τe is proportional to the pressure supplied by the valve
“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
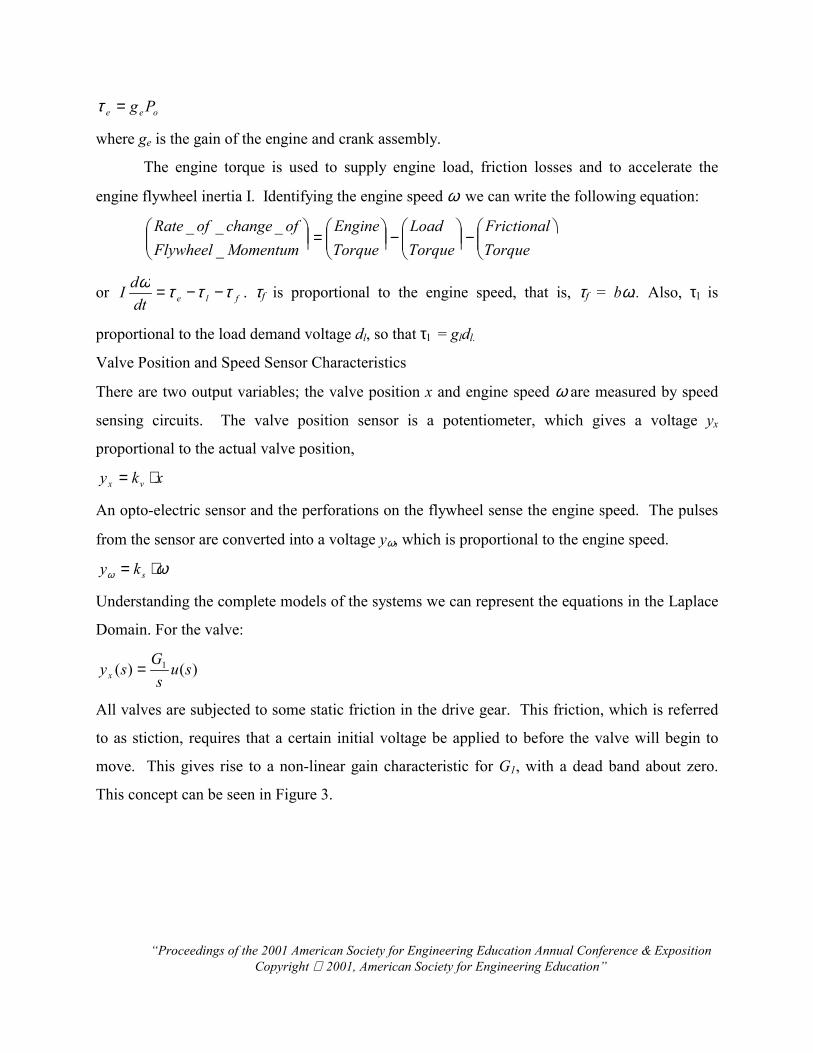
oee Pg=τ
where ge is the gain of the engine and crank assembly.
The engine torque is used to supply engine load, friction losses and to accelerate the
engine flywheel inertia I. Identifying the engine speed ω we can write the following equation:
����
�−��
����
�−��
����
�=��
����
�
TorqueFrictional
TorqueLoad
TorqueEngine
MomentumFlywheelofchangeofRate
____
or fledtdI τττω −−= . τf is proportional to the engine speed, that is, τf = bω.. Also, τl is
proportional to the load demand voltage dl, so that τl = gldl.
Valve Position and Speed Sensor Characteristics
There are two output variables; the valve position x and engine speed ω are measured by speed
sensing circuits. The valve position sensor is a potentiometer, which gives a voltage yx
proportional to the actual valve position,
xky vx ⋅=
An opto-electric sensor and the perforations on the flywheel sense the engine speed. The pulses
from the sensor are converted into a voltage yω, which is proportional to the engine speed.
ωω ⋅= sky
Understanding the complete models of the systems we can represent the equations in the Laplace
Domain. For the valve:
)()( 1 sus
Gsyx =
All valves are subjected to some static friction in the drive gear. This friction, which is referred
to as stiction, requires that a certain initial voltage be applied to before the valve will begin to
move. This gives rise to a non-linear gain characteristic for G1, with a dead band about zero.
This concept can be seen in Figure 3.

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
Figure 3: Non-Linear Gain Characteristic (Dead Band)
For the engine, we have
)(1
)(1
)( 2 sdsT
GsysT
Gsy ll
x +−
+=ω
The constant G2 is the gain of the system, which is the output voltage over the input voltage.
Here the input voltage will be the absolute value of the peak voltage of the step input, while the
output voltage will be the absolute value of the peak voltage measured at the terminal (ω) of the
motor. The value T is the pole of the system, which is obtained by analyzing the output voltage
waveform from the step input.
CE107 Block Diagram Development
It was observed that there was a non-linear effect associated with the gain of the air valve motor.
To reduce the effects of the non-linear gain, we will implement the method of local feedback.
The following figure illustrates the feedback loop with a gain k1 that is used to make the actual
valve position yx correspond to the desired valve position yr.
“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
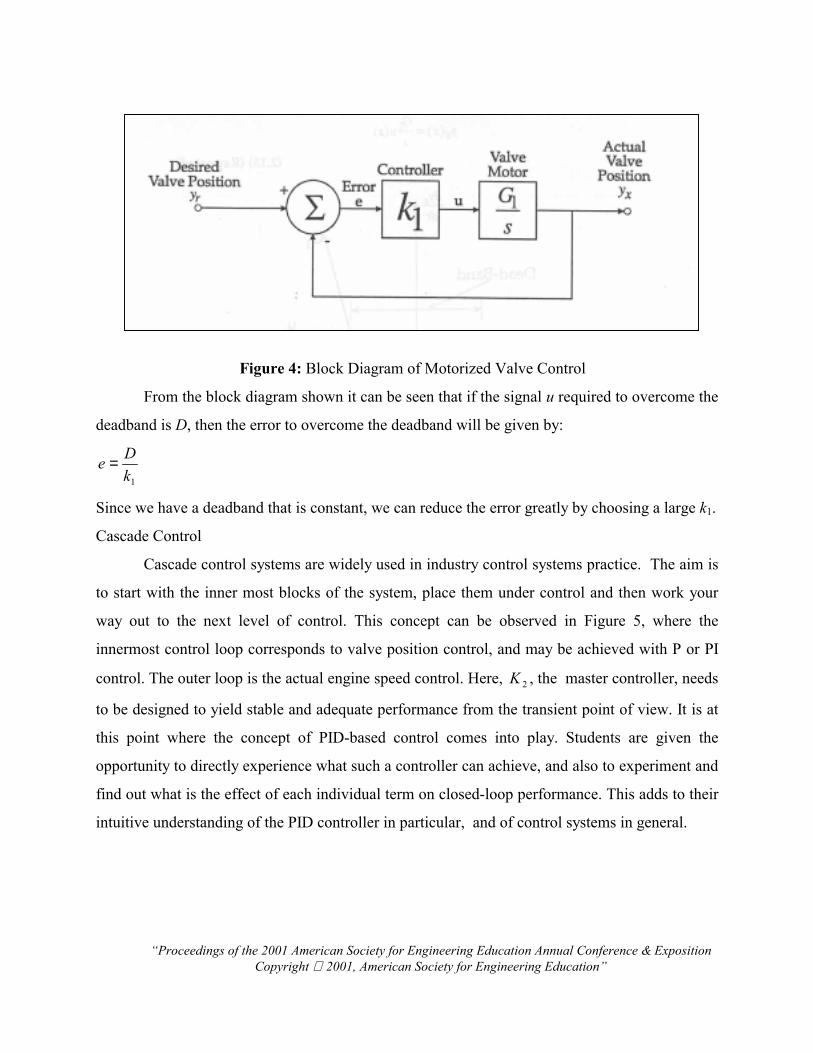
Figure 4: Block Diagram of Motorized Valve Control
From the block diagram shown it can be seen that if the signal u required to overcome the
deadband is D, then the error to overcome the deadband will be given by:
1kDe =
Since we have a deadband that is constant, we can reduce the error greatly by choosing a large k1.
Cascade Control
Cascade control systems are widely used in industry control systems practice. The aim is
to start with the inner most blocks of the system, place them under control and then work your
way out to the next level of control. This concept can be observed in Figure 5, where the
innermost control loop corresponds to valve position control, and may be achieved with P or PI
control. The outer loop is the actual engine speed control. Here, 2K , the master controller, needs
to be designed to yield stable and adequate performance from the transient point of view. It is at
this point where the concept of PID-based control comes into play. Students are given the
opportunity to directly experience what such a controller can achieve, and also to experiment and
find out what is the effect of each individual term on closed-loop performance. This adds to their
intuitive understanding of the PID controller in particular, and of control systems in general.

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
Figure 5: Engine speed control block diagram
Experiment 2: DC Motor Control Experiment
The plant is to control a DC motor manufactured by Feedback, Inc. The objective is to
achieve motor speed control that performs well under different loads using Feedback's Analog
Unit 33-110 board to create different circuits.
The Mechanical Unit contains a power amplifier that drives the motor from an analogue
or switched input. The motor’s output rotational speed undergoes a 32:1 belt reduction, and it
contains a magnetic brake to simulate a load, as well as a tachogenerator which is used as an
analogue speed transducer. Moreover, the system contains a brake disk with tracks on it. The
motor has a two-phase pulse train that reads a digital output from the brake disk and displays it.
The output shaft carries analogue (potentiometer) and digital (64 location Gray code) angle
transducers (we’re concerned with analogue signals here, but we could also use the digital signal
with the data acquisition card). Finally, the system contains a simple signal generator to provide
low frequency test signals, sine, square, and triangular waves. Figure 6 contains a schematic
diagram of the system.
The Analogue Unit connects to the Mechanical Unit through a 34-way ribbon cable
which carries all power supplies and signals enabling the normal circuit interconnections to be
made on the Analogue Unit using the 2mm patching leads provided. The Analogue Unit is used
to implement the control system. It allows to generate an input, modify the signal, send it to the
motor, and receive the output from the motor.
ye(t)
K1Air
ValveEngineΣK2Σ
e1(t) e2(t)
MasterController
SlaveController
re(t)
rv(t)
yv(t)
- -
u(t)

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
Figure 6: The DC Motor Experiment: Feedback Mechanical Unit
Controlling the Motor
The motor (Mechanical Unit) can be modeled as a simple DC motor as shown in Figure 7. In
Figure 7: Schematic of the DC Motor
Figure 7, Va(t) is the armature voltage, Ia is the armature current, θm is the shaft angle, θm’ is the
rotation velocity, Jm is the rotor inertia, b is the friction coefficient and Tl is the load torque
(disturbance).
+Va(t) _
DC motor
T θm
bθm’ Tl
Jm

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
The closed loop system can be represented by the following block diagram:
Figure 8: Control block diagram for the DC Motor
The basic goal of our control system is to enable the system to maintain a certain speed
regardless of the load placed upon it. We can accomplish this by using negative feedback
control. The feedback allows our system to calculate error and provide control that will
compensate for different loads. Here, as with the previous experiment, students are able to
experiment with PID control to achieve a satisfactory speed regulation. In particular, they are
able to observe, by experimenting, the increased disturbance rejection capabilities of the closed-
loop system versus the open-loop, unregulated one, and in particular of a closed-loop system that
uses a PID controller. By using the integral term they learn the real meaning of system type, and
how the integrator is able to provide zero steady state error, as opposed to a simple proportional
controller. Finally, the derivative term allows for a better transient performance, and students
acquire a first-hand experience of the actual meaning of the theory taught in the classroom.
Experiment 3: Feedback Process Control
The Level/Flow Process Control System will be used to study basic characteristics of
Proportional (P) and Proportional-Integral-Derivative (PID) control. The focus of the
experiments are on comparing (P) and (PI) control. Students observe the effect of controller gain
on steady state offset using P control and investigate the effect of controller parameters on the
dynamic response of the system for PI control. The experiments described in this paper use Level
Control experiments to illustrate the effect of the controller parameters on the dynamic response
of the closed loop system. The level control system is shown in Figure 1. A tank is fed with an
inlet flowrate (Fin having dimension volume/time) by a pump. A float level sensor (LS),
transmitter (LT) and controller (LC) are used to maintain the liquid level (h) close to the setpoint
Speed (y)Refspeed (r)
Controller+
_Motor
r-y=e

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
(hs) by adjusting flow rate out of the tank (Fout) via the control valve. The controller output
signal is based on the error, the difference between the process variable signal from the
transmitter and the setpoint hs. There are four experiments on process control that we describe.
Figure 9: The process level control system (previous paragraph describes the labels)
Disturbance rejection
The first two experiments focus on disturbance rejection. Students impose a 200 mL
pulse disturbance on the feed to the tank, and observe the dynamic response of the liquid level.
Recall from the PID system equation that K1 is the proportional gain, K2 is the derivative gain
and K3 is the integral gain.
Experiment 3 (a): Disturbance Rejection, Proportional-only control. Students investigate
the effect of controller gain K1 on the dynamic response of the system by varying the gain
between 0.1 and 0.25. At the end of the experiment, students should be able to explain the effect
of an increase in controller gain on the steady-state offset and dynamic response of the system.
They should be able to identify the controller gain that results in an oscillatory response. The
dynamic response of the liquid level to a disturbance with P-only control is shown in Figure 10.
hs
LS
F in
F o u t
h
L C
LT

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
2
4
6
8
10
12
14
0 5 10 15 20 25 30 35Time (s)
Setp
oint
/Pro
cess
Var
iabl
e (m
A
SetpointProcess Variable, K1=0.147Process Variable, K1=0.10Process Variable,K1=0.25
Figure 10: Effect of proportional controller gain on disturbance rejection
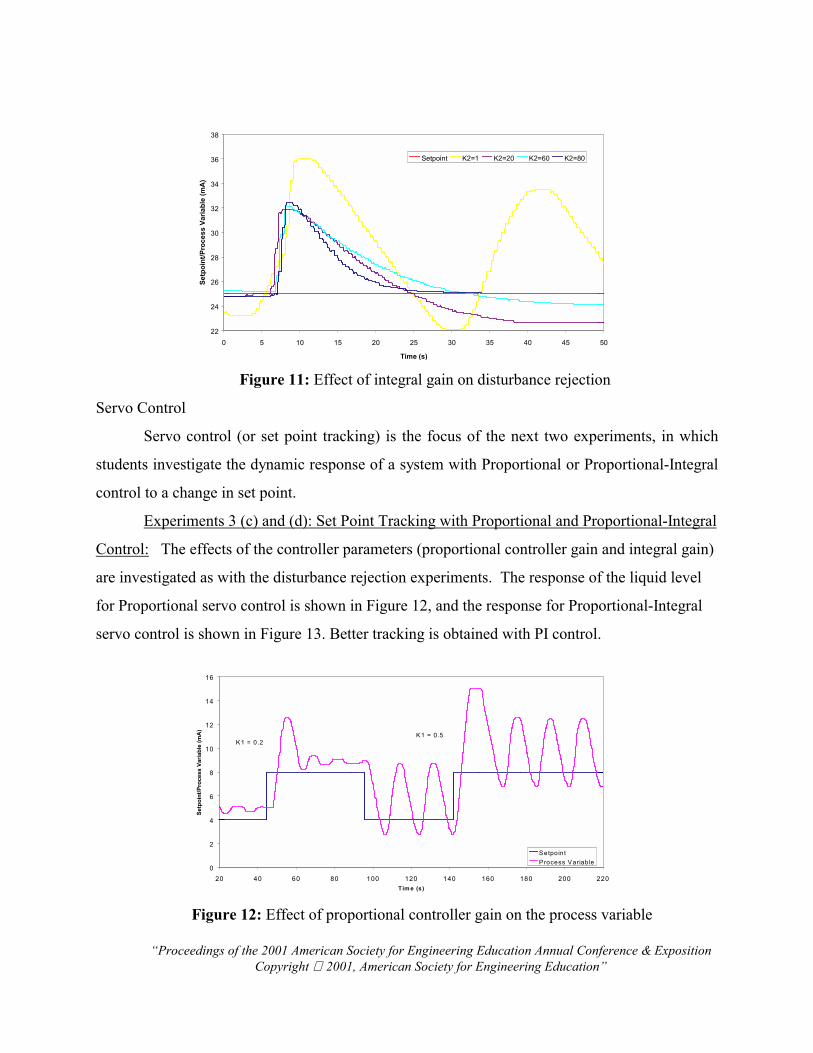
Experiment 3 (b): Disturbance Rejection, Proportional-Integral Control: Students
investigate the effect of reset time (equivalent to integral gain K2) on the dynamic response of the
system by varying the reset time K2 between 40 and 100 s for a range of proportional gain K1. At
the end of the experiment, students should be able to explain the effect of an increase in reset
time on the dynamic response of the system. They should be able to explain how reset time
impacts the speed (or sluggishness) of the response as well as the frequency of oscillations. The
dynamic response of the liquid level to a disturbance with P-I control is shown in Figure 11.
“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
22
24
26
28
30
32
34
36
38
0 5 10 15 20 25 30 35 40 45 50
Time (s)
Setp
oint
/Pro
cess
Var
iabl
e (m
A)
Setpoint K2=1 K2=20 K2=60 K2=80
Figure 11: Effect of integral gain on disturbance rejection
Servo Control
Servo control (or set point tracking) is the focus of the next two experiments, in which
students investigate the dynamic response of a system with Proportional or Proportional-Integral
control to a change in set point.
Experiments 3 (c) and (d): Set Point Tracking with Proportional and Proportional-Integral
Control: The effects of the controller parameters (proportional controller gain and integral gain)
are investigated as with the disturbance rejection experiments. The response of the liquid level
for Proportional servo control is shown in Figure 12, and the response for Proportional-Integral
servo control is shown in Figure 13. Better tracking is obtained with PI control.
0
2
4
6
8
10
12
14
16
20 40 60 80 100 120 140 160 180 200 220Tim e (s)
Setp
oint
/Pro
cess
Var
iabl
e (m
A)
SetpointProcess Variable
K1 = 0.2K1 = 0.5
Figure 12: Effect of proportional controller gain on the process variable

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
1 5
1 7
1 9
2 1
2 3
2 5
2 7
2 9
3 1
3 3
0 5 0 1 0 0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 4 5 0T im e (s )
Setp
oint
/Pro
cess
Var
iabl
e (m
A)
P ro c e s s V a r ia b leS e tp o in t
K 2 = 4 0K 1 = 0 .0 5
K 2 = 2 0K 1 = 0 .0 5
K 2 = 6 0K 1 = 0 .0 5
Figure 13: Effect of integral gain on the process variable
Summary
This NSF-funded project is progressing well at Rowan. We have described
multidisciplinary control experiments on PID control. The experiments allow the students to gain
a better grasp of the PID concept. Students improve their communication skills by writing
laboratory reports.
References
1. N. A. Kheir, K. J. Astrom, D. Auslander, K. C. Cheok, G. F. Franklin, M. Masten and M.
Rabins, “Control systems engineering education,” Automatica, volume 32, pp. 147-166,
1996.
2. R. C. Dorf and R. H. Bishop, Modern Control Systems, Addison-Wesley Longman, 2001.
3. M. F. Aburdene, E. J. Mastascusa, D. S. Schuster and W. J. Snyder, “Computer controlled
laboratory experiments”, Computer Applications in Engineering Education, volume 4, pp.
27-33, 1996.
4. R. Shoureshi, “A course on microprocessor based control systems”, IEEE Control Systems
Magazine, pp. 39-42, June 1992.
5. K. J. Astrom and M. Lundh, “Lund control program combines theory and hands-on
experience”, IEEE Control Systems Magazine, pp. 22-30, June 1992.

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
6. M. T. Hagan and C. D. Latino, “A modular control systems laboratory”, Computer
Applications in Engineering Education, volume 3, pp. 89-96, 1995.
7. U. Ozguner, “Three course control laboratory sequence”, IEEE Control Systems Magazine,
pp. 14-18, April 1989.
8. M. Mansour and W. Schaufelberger, “Software and laboratory experiments using computers
in control education”, IEEE Control Systems Magazine, pp. 19-24, April 1989.
9. J. A. Newell, A. J. Marchese, R. P. Ramachandran, B. Sukumaran and R. Harvey,
“Multidisciplinary Design and Communication: A Pedagogical Vision'', International
Journal of Engineering Education, Vol. 15, No. 5, pp. 376-382, 1999.
10. K. Jahan, R. A. Dusseau, R. P. Hesketh, A. J. Marchese, R. P. Ramachandran, S. A
Mandayam and J. L. Schmalzel, “Engineering Measurements in the Freshman Engineering
Clinic at Rowan University”, ASEE Annual Conference and Exposition, Seattle, Washington,
Session 1326, June 28-July 1, 1998.
11. A. J. Marchese, J. A. Newell, R. P. Ramachandran, B. Sukumaran, J. L. Schmalzel and J.
Marriappan, “The Sophomore Engineering Clinic: An Introduction to the Design Process
Through a Series of Open Ended Projects”, ASEE Annual Conference and Exhibition,
Charlotte, North Carolina, Session 2225, June 20-23, 1999.
12. L. M. Head, G. Canough and R. P. Ramachandran, “Design of a Robust and Low Cost Solar
Lantern as a One Semester Project'', ASEE Annual Conference and Exhibition, St. Louis,
Missouri, Session 2793, June 18--21, 2000.
Acknowledgement
The authors wish to acknowledge that this work was supported by an NSF CCLI grant (DUE #
9950882).
Biography
Ravi P. Ramachandran is an Associate Professor in the Department of Electrical and Computer
Engineering at Rowan University. He received his Ph.D. from McGill University in 1990 and has
worked at AT&T Bell Laboratories and Rutgers University prior to joining Rowan.

“Proceedings of the 2001 American Society for Engineering Education Annual Conference & ExpositionCopyright 2001, American Society for Engineering Education”
Stephanie Farrell is an Associate Professor in the Department of Chemical Engineering at Rowan
University. She received her Ph.D. degree in 1996 from the New Jersey Institute of Technology.
She was on the faculty at Louisiana Tech University prior to joining Rowan.
Raul Ordonez is an Assistant Professor in the Department of Electrical and Computer
Engineering at Rowan University. He received his Ph.D. from Ohio State University in 1999. His
research interests include nonlinear control and robotics.
Zenaida Otero Gephardt is Associate Professor of Chemical Engineering at Rowan University
where she has also served as Assistant Dean and Director of Engineering. She holds a Ph.D. in
chemical engineering from the University of Delaware and is a licensed professional engineer.
Her expertise is in process optimization, statistical analysis and experimental design. She has
worked with supercritical fluids and particle technology.
Hong Zhang obtained his Ph.D. from the GRASP lab of the University of Pennsylvania in 2000.
Thereafter, he joined the Mechanical Engineering Department of Rowan University as an
Assistant Professor. His research interests includes robot motion planning, visual servo control
and nonlinear control.