modred 2010 challenges and experiences in model reduction for mechanical systems ... · elastic...
TRANSCRIPT

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Challenges and Experiences in Model Reduction for Mechanical Systems Illustrated for the Reduction of
a Crankshaft
Christine Geschwinder, Jörg Fehr und Peter Eberhard
MODRED 2010

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
robotics
power engineering
Application EMBS
EMBSsaves experiments and prototypes due to simulationlightweight constructions requires consideration of elastic effects
automotive and drive engineering
researchmodel reduction
models gets moredetailed and largerno efficient simulationpossible without MORfor use of modal reduction it is necessary to have a lot of know-how and no simple error-control is possible

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Principle of Elastic Multibody System
multibody system
elastic bodydiscretisation
finite element,finite difference,...
continuum
elastic multibody system
rigid body
bearings and coupling elements
p bodiesf degrees of freedomq reaction force
C
reduction of the elastic degrees of freedom
elastic multibody systems are an important tool for calculation of complex mechanical systemsmodels are getting larger and more detailed
FE-models has to be reduced cause of a large number of degrees of freedom

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
combustion engineimportant component: bearing of a crankshaft
calculation of hydrodynamic bearingforces for discrete crankshaft positions
deformation of the crankshaft has great influence
for realistic results:combination of elasto-hydrodynamicbearings and elastic multibody system
Technical and Industrial Application
rod bearingmain bearing
solving expenseelasto-hydrodynamic equationsequation of motion of the elastic bodies
rigid crankshaft
elastic crankshaft
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Overview
motivation
model reduction of elastic bodiesshort overview of industrial state of art and current state of developmentsmodel reduction based on the frequency weighted Gramian matrices with POD
reduction of the crankshaft
conclusions and outlook
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
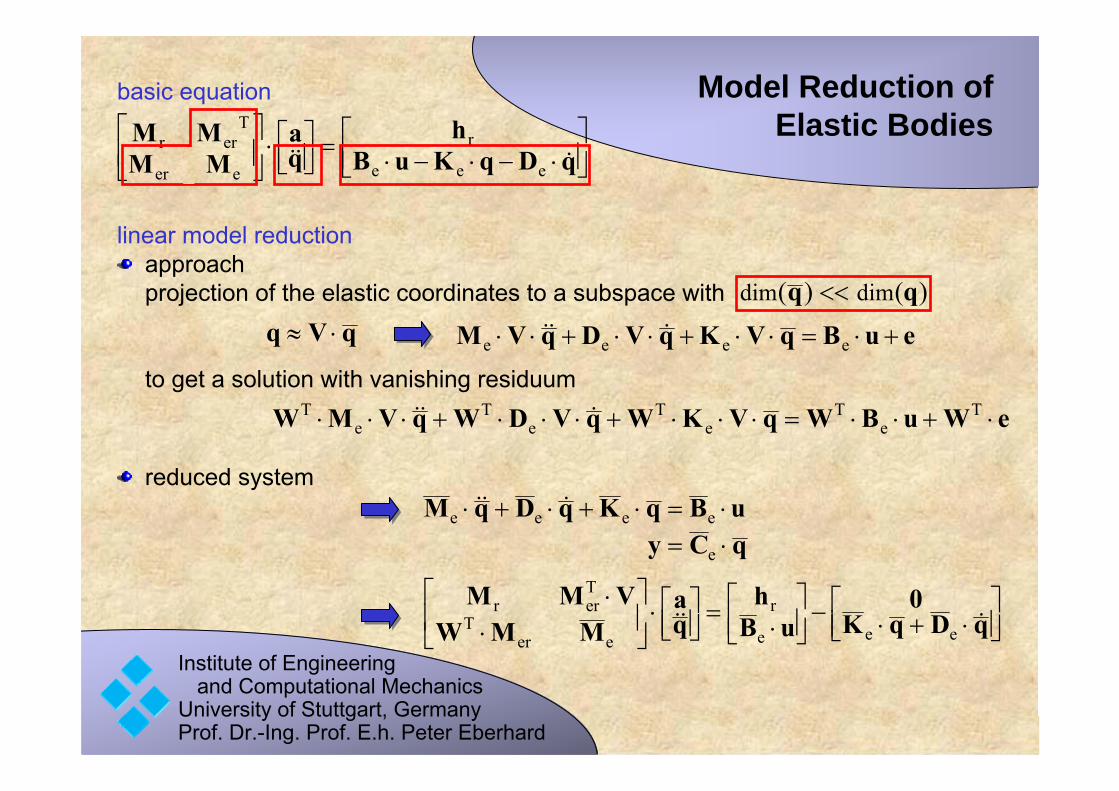
Model Reduction ofElastic Bodies
basic equation
linear model reductionapproachprojection of the elastic coordinates to a subspace with
to get a solution with vanishing residuum
reduced system
qVq euBqVKqVDqVM eeee
eWuBWqVKWqVDWqVMW Te
Te
Te
Te
T
uBqKqDqM eeee
)()( dimdim qq
qDqK
0uB
hqa
MMWVMM
eee
r
eerT
Terr
qCy e
qDqKuB
hqa
MMMM
eee
r
eer
Terr

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Overview of Model Reduction Techniques
industrial state of art
traditional modal reduction (selection of modes by user)Craig-Bampton/ Component Mode Synthesis (CMS)
current state of developments
reduction with moment matching and Krylov-subspacesmethods based on Gramian matricescombinated reduction techniques
model reduction techniques used for elastic bodies

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
position and velocityGramian matricesGramian matrices play an important rolein balanced truncation model reductionfor second order systems:
Gramian matrices of the equivalent first order system
partitioning the Gramian matrices
alternative characterization of Gramian matricesconnection with -Norm
alternative observability Gramian matricesfor second order systems
with structural propertieswith same in- and outputs
Balanced Truncation of 2nd Order Systems
,po
opTv
Tp
v
p
PP
PPSS
SSP
po
opTv
Tp
v
pQQQQ
RRRRQ
TSSP TRRQ
2H Te1
evTee
T2H trtr2
BMQMBBQBH
TepeT trtr CPCCPC
1ev
Tepv :
MQMQ
Tee BC
pvp QP

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Frequency Weighted 2nd Order Gramian Matrix
motivationin engineering problems, oftenknowledge about the interestingfrequency range is available
frequency weighted Gramian matrixfrequency range are emphasized by applying an suitable frequency filter
with
band pass frequency weighted Gramian matrixfor mechanical systems the filter matrices are often not available directly but the interesting frequency range is knownband pass Gramian matrix for an arbitrary frequency range maxmin ,
)i( W
djjjj21 HT
eH
ep GBWWBGP 1
eee2 )j(j KDMG
min
max
max
min
djj21djj
21, HT
eeHT
eemaxminp GBBGGBBGP
advantagesa priori error boundaryweighting of a specialfrequency range
disadvantagescalculation of the matrix integralonly efficiently possible for small models

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
max
min
djjjj21, TT
eeHT
eemaxminp GBBGGBBGP
Calculation of the 2nd Order Gramian Matrix
approximationcalculation of the integral by numerical integral at discrete frequency sampling point
node displacement snapshots
snapshots matrix
numerical integration
summarize of all snapshot matrices to one snapshot matrix
i
eiii jjˆ BGQU
iii ˆImˆRe~ UUU
l
1i
Tiiminmaxmaxminpmaxminp
~~1l
,~, UUPP
l
pl221l21 ~ˆˆ uuuUUUU
T
c
minmaxmaxminp 1l
,~ UUP

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Proper Orthogonal Decomposition (POD)
basic ideareducing large number ofdependent variables to a small numberof uncorrelated variables
snapshotsfrequency response of a harmonic excitationsnapshot matrix with
approximation approachsearch of an orthogonal basis , which minimizes least squares difference between snapshots and the approximated subspace
with Langrange-function for constraints → eigenvalue problem
)j( ii Xu
s21 uuuU
2s
1j
m
1iii
jjmin
uuΦ
s
1j
m
1i
2i
jmax uΦ
m21 Φ
iiiT λ
s1
R
UU i
i
dominant eigensubspace of POD problem = dominant eigensubspace of Gramian matrix
Proper Orthogonal Value (POV)
Proper Orthogonal Mode (POM)
POD - kernelR
pl2s

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
POD Snapshot Method with Greedy Search
snapshots methodbased on data vector and theProper Orthogonal Modes span thesame linear space
POD eigenvalue problem
every snapshot affectson the POMs with
Greedy Searchadaptive search of the snapshotsproceeding
searching for the frequency at the maximum error of an error messure calculated for the interesting frequency rangethis frequency is used for the next snapshot
kiu
s
1k
kiki a u
s
1k
kiki
s
1j
Tjs
1k
ik
kj aλas1 uuuu i
ki
s
1k
ik
kj aλas1
uu
snapshots method reduce the POD-problem to an s dimensional eigenvalue problem
weight factor of snapshot
ika
maxmin ,

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Overview
motivation
model reduction of elastic bodiesshort overview of industrial state of art and current state of developmentsmodel reduction based on the frequency weighted Gramian matrices with POD
reduction of the crankshaft
conclusions and outlook

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
The Crankshaftbasic information
number of nodes 15 631number of elements 60 279number of indipendent DoF 46 860number of in- and outputs 35
modeling of inputs and outputs
reducing the number of inputs and outputs by interface nodes (RBE3) wich causeconstraint equations
interface node

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Frequency Response
4036, 572,65822
265,794778,28609
5980,07101133,495010
828282
40nred
0,500,699
0,590,3715
nsnap
[10-10] fmax=200Hz
[10-10] fmax=2000Hz
7 3789000,00 210765,83
5 0,39 0,76
error in H∞-norm
H
H
reduction to nred = 82
Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
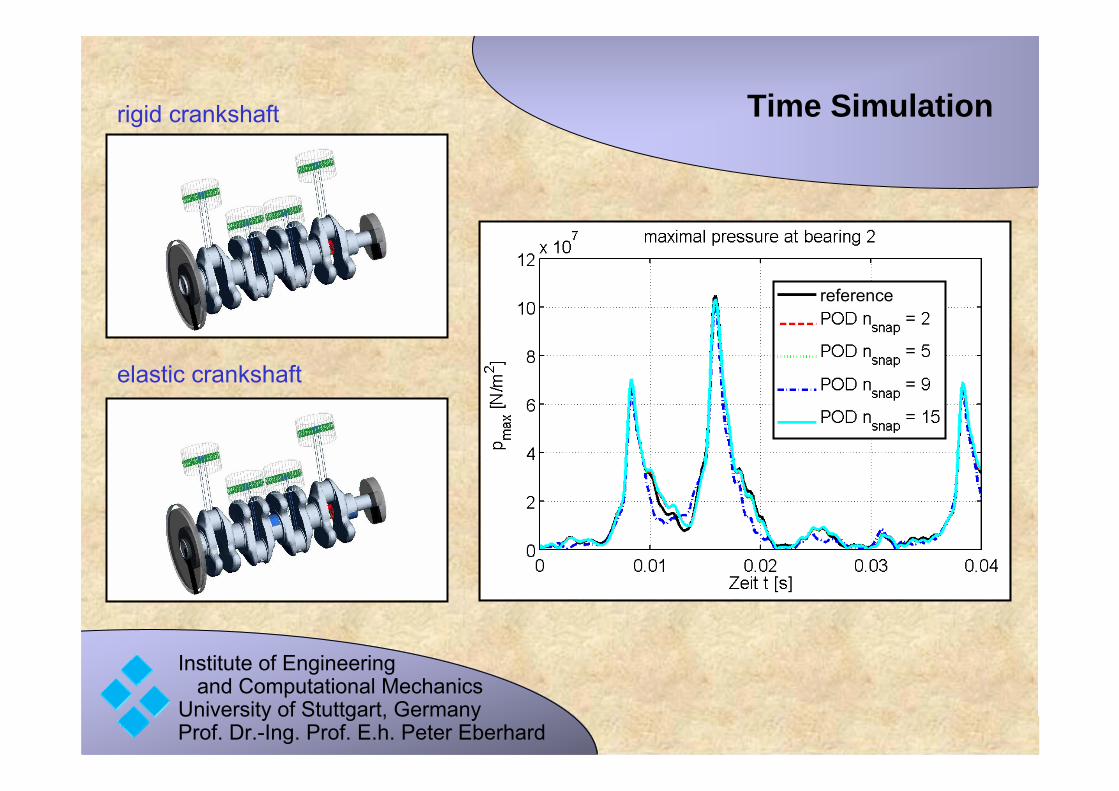
Time Simulationrigid crankshaft
elastic crankshaft
reference

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Overview
motivation
model reduction of elastic bodiesshort overview of industrial state of art and current state of developmentsmodel reduction based on the frequency weighted Gramian matrices with POD
reduction of the crankshaft
conclusions and outlook

Institute of Engineering and Computational Mechanics
University of Stuttgart, GermanyProf. Dr.-Ing. Prof. E.h. Peter Eberhard
Conclusions and Outlook
an industrial application where model order reduction is imported is introducedcalculation of hydrodynamic bearings with the help of an elasticcrankshaft
overview of industrial and current state of art of model reduction techniques is givenalternative model reduction based on frequency weighted Gramian matrices with the help of POD is explained
results of reduction of the crankshaft is shown for the frequency range and the time domain
application of POD for large-scale industrial applicationsapplication and improvement of error estimator for POD reductions
summary
outlook
thank you for your attention