modeling of active control on kstar - general atomics · pdf filemodeling of active control on...
TRANSCRIPT

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 0
Modeling of Active Controlon KSTAR
Oksana Katsuro-Hopkins1, S.A. Sabbagh1, J.M. Bialek1, H.K.Park2, J.Y. Kim3, K.-I. You3, A.H. Glasser4, L.L. Lao5
1Department of Applied Physics, Columbia University, New York, NY, USA2Plasma Physics Laboratory, Princeton University, Princeton, NJ, USA
3Korea Basic Science Institute, Daejeon, Korea 4Los Alamos National Laboratory, Los Alamos, NM, USA
5General Atomics, San Diego, CA, USA
Workshop on Active Control of MHD Stability
November 18-20, 2007
Columbia University, New York, NY

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 1
Numerical design study to optimize advanced stability ofKSTAR merging present experimental results & machine design
• Motivation Design optimal global MHD stabilization system for KSTAR
with application to future burning plasma devices
• Outline Free boundary equilibrium calculations Ideal stability operational space for experimental profiles RWM stability and VALEN-3D modeling Advanced feedback control algorithm and performance
*O.Katsuro-Hopkins at al., Nucl. Fusion 47 (2007) 1157-1165.

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 2
Parameters:• R 1.8m• a 0.5 m• Bto 3.5 T• τpulse 300 s• Ip 2.0 MA• Ti 100~300MC• Magnet:
TF : Nb3Sn, PF : NbTi
Korea Superconducting Tokamak Advanced Researchwill study steady-state advanced tokamak operation & technology

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 3
KSTAR configuration used in EFIT calculations
• EFIT industry-standard tool Free-boundary equilibria
Expandable range ofequilibria
• Data from KSTAR designdrawings
• Passive stabilizers/vacuumvessel included. Important for start up studies Reconstructions during
events that change edgecurrent (e.g. ELMs)
MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 4
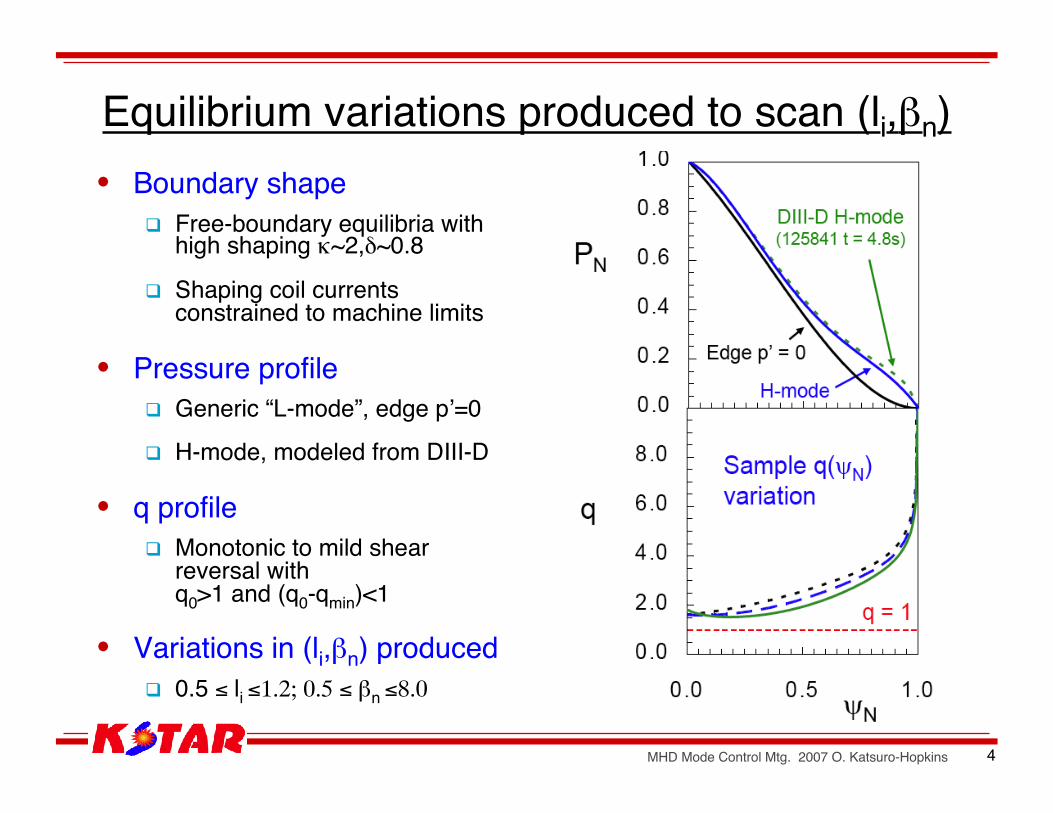
Equilibrium variations produced to scan (li,βn)• Boundary shape
Free-boundary equilibria withhigh shaping κ~2,δ~0.8
Shaping coil currentsconstrained to machine limits
• Pressure profile Generic “L-mode”, edge p’=0 H-mode, modeled from DIII-D
• q profile Monotonic to mild shear
reversal withq0>1 and (q0-qmin)<1
• Variations in (li,βn) produced 0.5 ≤ li ≤1.2; 0.5 ≤ βn ≤8.0

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 5
Ideal stability(DCON): conducting wall allows significantpassive stabilization for n=1 H-mode pressure profile
• “inner” wall used• Wall-Stabilized βn is a factor
of two greater then forequilibrium without wall atli ~ 0.7
• Wall-Stabilized βn from DCON agreeswith VALEN-3D value
• “outer” wall used• Wall-Stabilized βn > 6.5 (larger
than the result using “inner” wall at li ~ 0.7)
• Optimistic, but does not agree withVALEN-3D. “Inner” wall is more realisticand should be used in DCON analysis

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 6
L-mode pressure profile has largen=1 stabilized region
• “inner” wall used• Wall-Stabilized region
at lowest li (Unfavorablefor n=0 stabilization)
• Possible difficulty toaccess with L-mode confinement.
• n=2 stability has higher no-wall& lower with-wall limits than n=1for H-mode and L-modepressure profile Internal n=2 modes were
observed in NSTX duringn=1 active RWMstabilization.

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 7
Conducting hardware, IVCC set up in VALEN-3D*
based on engineering drawings• Conducting structures
modeled Vacuum vessel with
actual port structure Center stack back-
plates Inner and outer
divertor back-plates Passive stabilizer PS Current bridge
• Stabilization currentsdominant in PS 40 times less
resistive than nearbyconductors.
n=1 RWM passive stabilization currents
*Bialek J. et al 2001 Phys. Plasmas 8 2170
MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 8
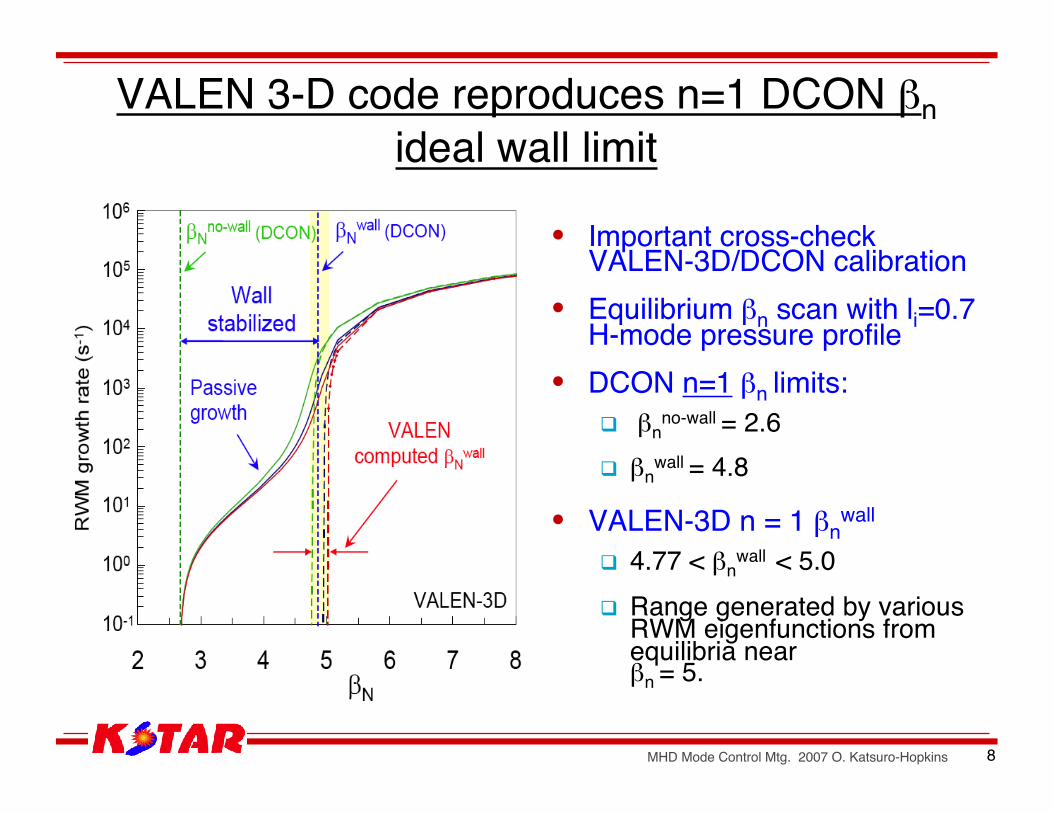
VALEN 3-D code reproduces n=1 DCON βnideal wall limit
• Important cross-checkVALEN-3D/DCON calibration
• Equilibrium βn scan with li=0.7H-mode pressure profile
• DCON n=1 βn limits: βn
no-wall = 2.6 βn
wall = 4.8
• VALEN-3D n = 1 βnwall
4.77 < βnwall < 5.0
Range generated by variousRWM eigenfunctions fromequilibria nearβn = 5.

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 9
IVCC allows active n=1 RWM stabilizationnear ideal wall.
• Active n=1 RWMstabilization capability with
Optimal ability for modestabilization
Mid-plane IVCC used
• Equilibrium βn scan withli=0.7 H-mode pressureprofile
• Computed βn limits βn
no-wall = 2.56 βn
wall = 4.76
€
Cβ =βn −βn
no wall
βnwall −βn
no wall > 98%

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 10
Power estimates bracket needs for KSTAR RWM control
Unloaded IVCCL=10µHR=0.86mOhmL/R=12.8ms
FAST IVCC circuitL=13µHR=13.2mOhmL/R=1.0ms
Proportional gaincontroller
White noise (1.6-2.0G RMS)
(RMS values)
NSTX 120047 ΔBp sensors
(RMS values)Cβ IIVCC(A) VIVCC(V) PIVCC(W) IIVCC(A) VIVCC(V) PIVCC(W)80% 30 1.6 45 362 0.7 25395% 41 2.0 82 430 0.8 307
80% 20.9 1.56 30.0 1.9e3 24.9 62e395% 28.3 1.78 50.6 9e3 119 1.8e6

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 11
Power estimates bracket needs for KSTAR RWM control
• Initial results using advanced Linear Quadratic Gaussian (LQG) controller yieldfactor of 2 power reduction for white noise.
• LQG controller consists of two steps: Balanced Truncation of VALEN state-space for fixed βn Optimal controller and observer design based on the reduced order system
Unloaded IVCCL=10µHR=0.86mOhmL/R=12.8ms
FAST IVCC circuitL=13µHR=13.2mOhmL/R=1.0ms
LQGcontroller
Proportional gaincontroller
White noise (1.6-2.0G RMS)
(RMS values)
NSTX 120047 ΔBp sensors
(RMS values)Cβ IIVCC(A) VIVCC(V) PIVCC(W) IIVCC(A) VIVCC(V) PIVCC(W)
80% 30 / 29 1.6 / 0.8 45 / 24 362 0.7 25395% 41 / 35 2.0 / 0.9 82 / 34 430 0.8 307
80% 20.9 1.56 30.0 1.9e3 24.9 62e395% 28.3 1.78 50.6 9e3 119 1.8e6

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 12
State-space control approach may allowsuperior feedback performance
• VALEN circuit equations after including plasma stability effects the fluxes at thewall, feedback coils and plasma are given by
• Equations for system evolution are given by
• In the state-space form
where& measurements are sensor fluxes. State-space dimension ~1000elements!
• Classical control law with proportional gain defined as
€
r Φ w =
t L ww ⋅
r I w +
t L wf ⋅
r I f +
t L wp ⋅ Id
r Φ f =
t L fw ⋅
r I w +
t L ff ⋅
r I f +
t L fp ⋅ Id
Φp =t L pw ⋅
r I w +
t L pf ⋅
r I f +
t L pp ⋅ Id
€
t L ww
t L wf
t L wpt
L fwt
L fft
L fpt L pw
t L pf
t L pp
⋅
ddt
r I wr I fId
=
t R w 0 00
t R f 0
0 0t R d
⋅
r I wr I fId
+
r 0 r V f0
€
r ˙ x =t A
r x +
t B
r u
r y = C
r x
€
r x =
r I w
r I f Id( )
T;
t A = −
t L −1 ⋅
t R ;
t B =
t L −1 ⋅
t I cc;
r u =
r V f
€
r u = −
t G p
r y
€
r y =
r Φ s
MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 13
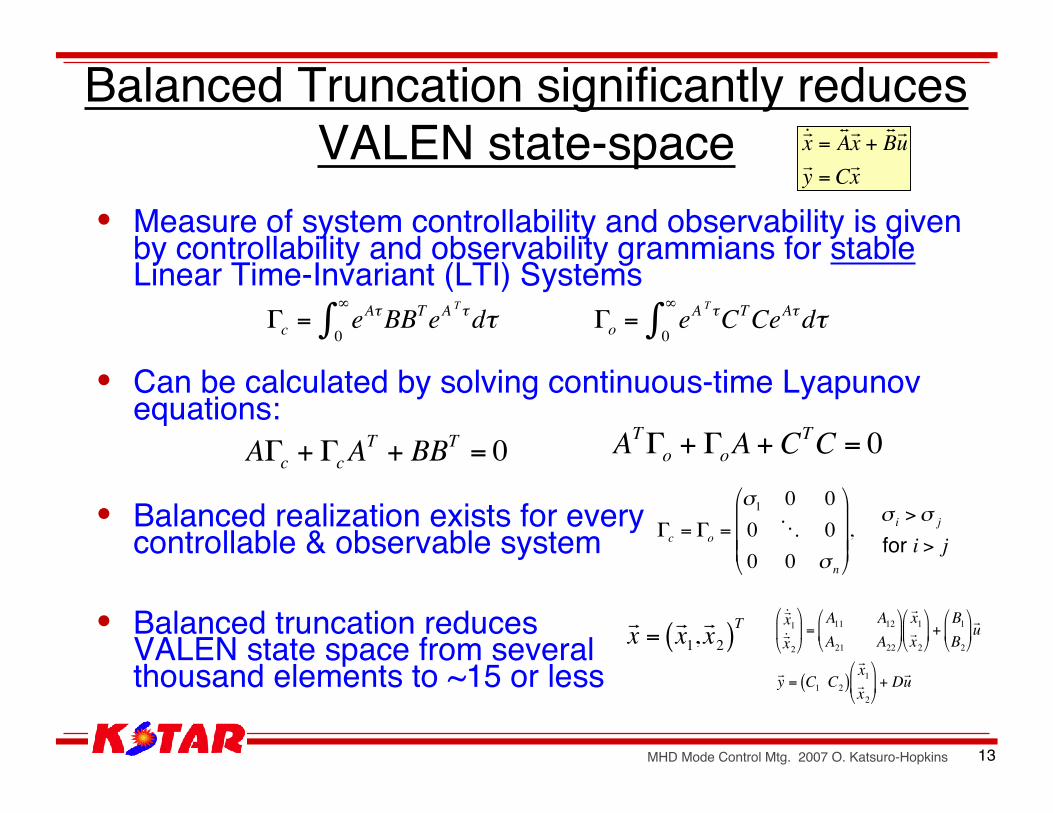
Balanced Truncation significantly reducesVALEN state-space
• Measure of system controllability and observability is givenby controllability and observability grammians for stableLinear Time-Invariant (LTI) Systems
• Can be calculated by solving continuous-time Lyapunovequations:
• Balanced realization exists for everycontrollable & observable system
• Balanced truncation reducesVALEN state space from severalthousand elements to ~15 or less
€
Γc = eAτBBT0
∞
∫ eATτdτ
€
Γo = eATτCTCeAτ
0
∞
∫ dτ
€
AΓc + ΓcAT + BBT = 0
€
ATΓo + ΓoA + CTC = 0
€
Γc = Γo =
σ1 0 00 O 00 0 σ n
,
σ i >σ j
for i > j
€
r ˙ x 1r ˙ x 2
=
A11 A12
A21 A22
r x 1r x 2
+
B1
B2
r u
r y = C1 C2( )
r x 1r x 2
+ D
r u
€
r x =
r x 1,
r x 2( )T
€
r ˙ x =t A
r x +
t B
r u
r y = C
r x

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 14
HSV spectrum of KSTAR VALEN state-space suggests areduction of stable part of the system to just 2 balanced states
• LQG controller uses 4 central IVCC & 16 mid-plane poloidal sensors
• Clear gap in HSV spectrum
• Largest SV includes the full system frequency response up to an RWMpassive growth rate.
# of modes
HSV
i
Sing
ular
Val
ues
Frequency rad/sec
___ Full system- - - Reduced system (Nr=3)
€
} Gap ⇒ Nr = 1 RWM + 2

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 15
Closed System Equations with Optimal Controller and OptimalObserver based on Reduced Order Model
€
˙ x ˆ ˙ x
=
A −BKcCr
K f C F
xˆ x
+
0K f
ω
F = Ar −K f Cr − (Br −K f Dr )KcCr
€
x = Ax + Buy = Cx +ω
€
ˆ x = Ar ˆ x + Bru + K f (y − ˆ y )ˆ y = Cr ˆ x + Dru
€
u = −Kc ˆ x €
y
€
ˆ x
€
u
€
ωMeasurementnoise
Full order VALENmodel
Optimal observer
Optimal controller
⇐Closed loop continuous systemallows to Test if Optimal controller and observer
stabilizes original full order model Verify robustness with respect to βn
Estimate RMS of steady-state currents,voltages and power

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 16
Advanced controller methods planned to be testedon NSTX with future application to KSTAR
• VALEN NSTX Model includes Stabilizer plates for kink
mode stabilization External mid-plane control
coils closely coupled tovacuum vessel
Upper Bp sensors in actuallocations
Compensation of controlfield from sensors
Experimental Equilibriumreconstruction (includingMSE data)
• Present control system onNSTX uses Proportional Gain
RWM active stabilization coils
RWM sensors (Bp)
Stabilizerplates

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 17
Advanced control techniques suggests significant feedbackperformance improvement for NSTX up to = 95%
• Classical proportionalfeedback methods VALEN modeling of
feedback systems agreeswith experimental results
RWM was stabilized up toβn = 5.6 in experiment.
• Advanced feedbackcontrol may improvefeedback performance Optimized state-space
controller can stabilize upto Cβ=87% for upper Bpsensors and up to Cβ=95%for mid-plane sensors
Uses only15 modes foroptimal observer andcontroller design 1.E+00
1.E+01
1.E+02
1.E+03
1.E+04
4 4.5 5 5.5 6 6.5 7 7.5
βn
Gro
wth
rate
1/
sec Passive
Ideal Wall
Active Feedback
MC NR=13 Midplanesensors
MC NR=15 s=0.15849Upper Bp sensors
Gro
wth
rate
(1/s
)
βN
DCONno-wall
limit
Experimental (control off)(β collapse) With-wall limit
active controlpassivegrowth
activefeedback
Experimental (control on)
AdvancedFeedback
Bp sensors
AdvancedFeedback
M-P sensors
€
βn βnwall

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 18
Next steps and future work on the KSTARstability analysis
• Expand equilibrium / ideal stability analysis as needed Collaborate on equilibrium reconstructions of first
plasmas
• Closer definition of RWM control system circuit byinteraction with KSTAR engineering team
• Improved noise model for KSTAR sensor noise• LQG controller with plasma rotation for KSTAR• LQG controller tests on NSTX with application to KSTAR
RWM control system design• Critical latency testing for KSTAR RWM control
MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 19
KSTAR is capable of producing long-pulse, high βn stability research
• Machine designed to run high βn plasmas with low li andsignificant plasma shaping capability
• Large wall-stabilized region to kink/ballooning modes withβn/ βn
no-wall = 2 at highest βn predicted for the device Co-directed NBI, passive stabilizers allow kink stabilization
• Active IVCC mode control system provide strong RWMcontrol IVCC design allows active n= 1 RWM stabilization at very
high Cβ> 98%
• Fast IVCC circuit for stabilization is possible at reasonablepower levels
MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 20

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 21
Optimal controller and observer based on reduced orderVALEN model reduce power and achieve higher βn
Minimize Performance Index:
- state and control weighting matrix,Controller gain for the steady-state can be calculated aswhere is solution of the controllerRiccati equation
Minimize error covariance matrixwhere is Kalman Filter gain and is solution of observerRiccati equation
plant and measurement noise covariance matrix.
€
J =r ˆ x '(τ )Qr (τ )r ˆ x (τ ) +
r u '(τ )Rr(τ )r u (τ )( )dτ
t
T
∫ →min
€
Qr,Rr
€
SAr + ArT S - SBrRr
−1BrT S +Qr = 0
€
Kc = R−1BrT S
€
S
€
K f = PC'W −1
€
P
€
ArP + PArT − PCr
TW −1CrP +VT = 0
€
V , W
Controller:
Observer:
€
E (x − ˆ x )(x − ˆ x )T y(τ ),τ ≤ t{ }→min
€
u = −Kc ˆ x
€
ˆ ˙ x = Ar ˆ x + Bru + K f y −Cr ˆ x ( )

MHD Mode Control Mtg. 2007 O. Katsuro-Hopkins 22
Noise on RWM sensors sets control system power• Gaussian white noise
~1.5Gauss RMS, based on noise inDIII-D RWM Bp sensors
Minimum estimate of control powerconsumption
• Perfect response to RWM• No other coherent modes
• Experimental sensor input NSTX Bp sensor during RWM active
stabilization Maximum estimate of control system
power consumption• DC offset from resonant field
amplification; stray field from passiveplate currents
• The ΔB/B0 larger in ST than at higherapsect ratio