microfluidics propulsion & system integration in mems devices
TRANSCRIPT

UW NANOROBOTICS GROUPMicrofluidics Propulsion & System Integration in MEMS Devices

ABOUT UW_NRG
An undergraduate led research group comprised of students from multiple disciplines of engineering
Mentored by faculty members including Professors Mustafa Yavuz and Omar Ramahi
Research interests in: Integration of microfluidics, RF, photovoltaics, and digital logic for creating
advanced devices Improving MEMS technologies for industry adoption
PROJECT
Designing a 300 micron diameter device to compete at the 2009 Nanogram Robocup Competition
Robocup is an annual competition held to promote AI, robotics and related fields since 1993
Nanogram is a NIST supported initiative to advance integrated MEMS devices
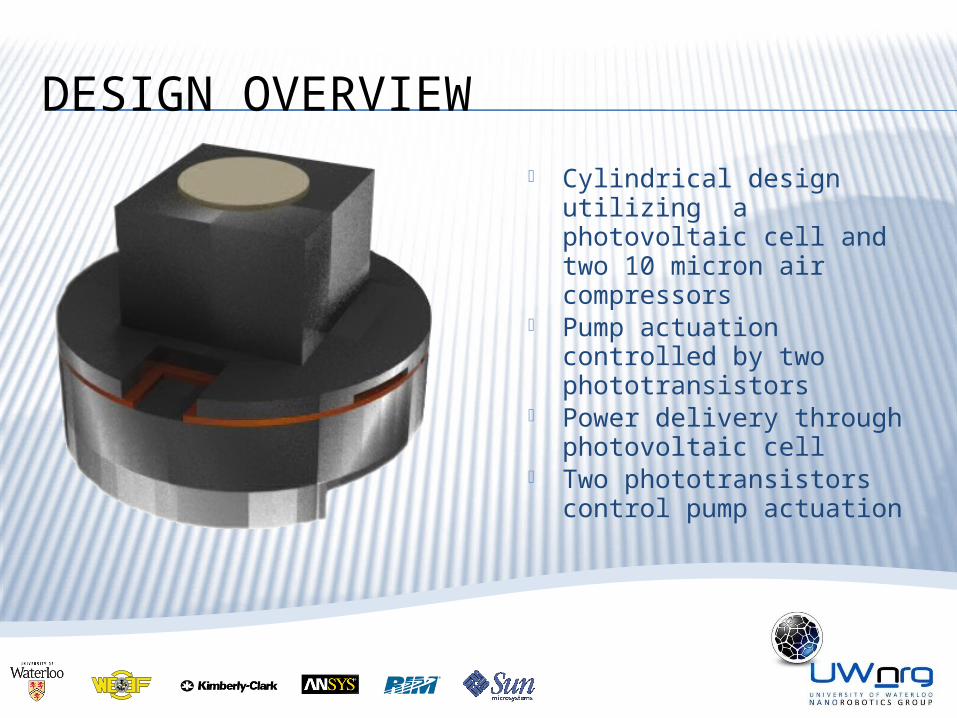
DESIGN OVERVIEW Cylindrical design utilizing a
photovoltaic cell and two 10 micron air compressors
Pump actuation controlled by two phototransistors
Power delivery through photovoltaic cell
Two phototransistors control pump actuation
MICROCOMPRESSOR – PRINCIPLE
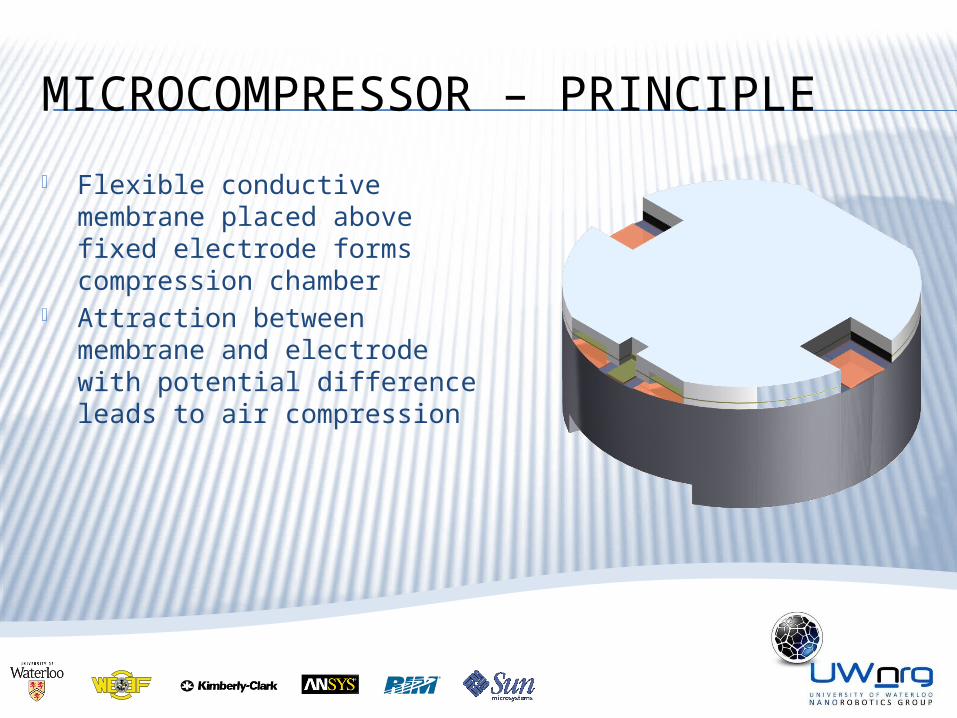
Flexible conductive membrane placed above fixed electrode forms compression chamber
Attraction between membrane and electrode with potential difference leads to air compression
MICROCOMPRESSOR – DESIGN
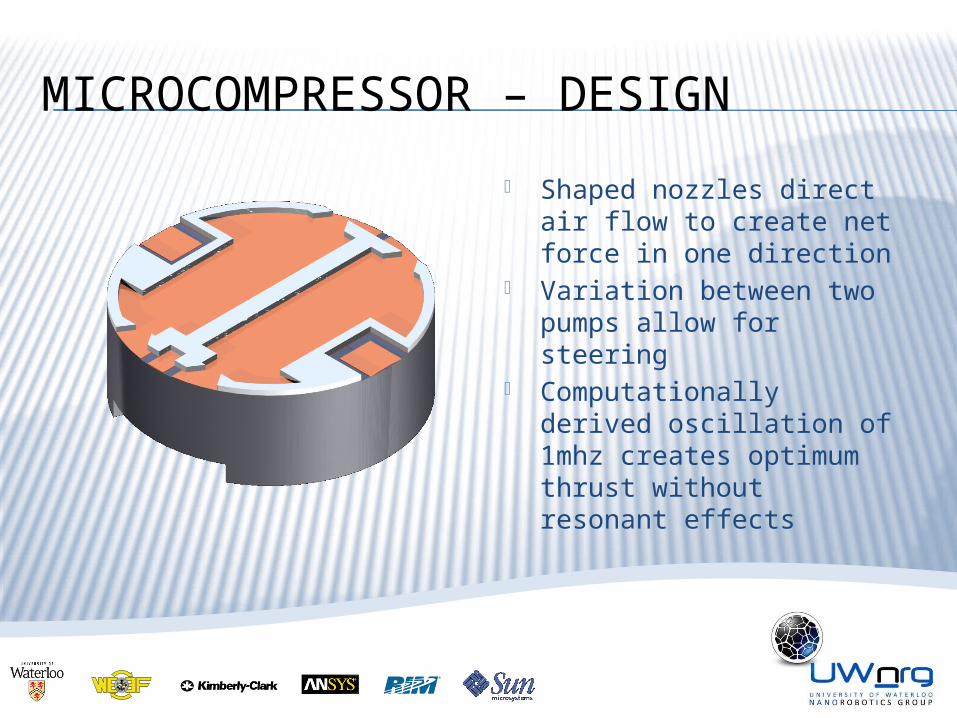
Shaped nozzles direct air flow to create net force in one direction
Variation between two pumps allow for steering
Computationally derived oscillation of 1mhz creates optimum thrust without resonant effects
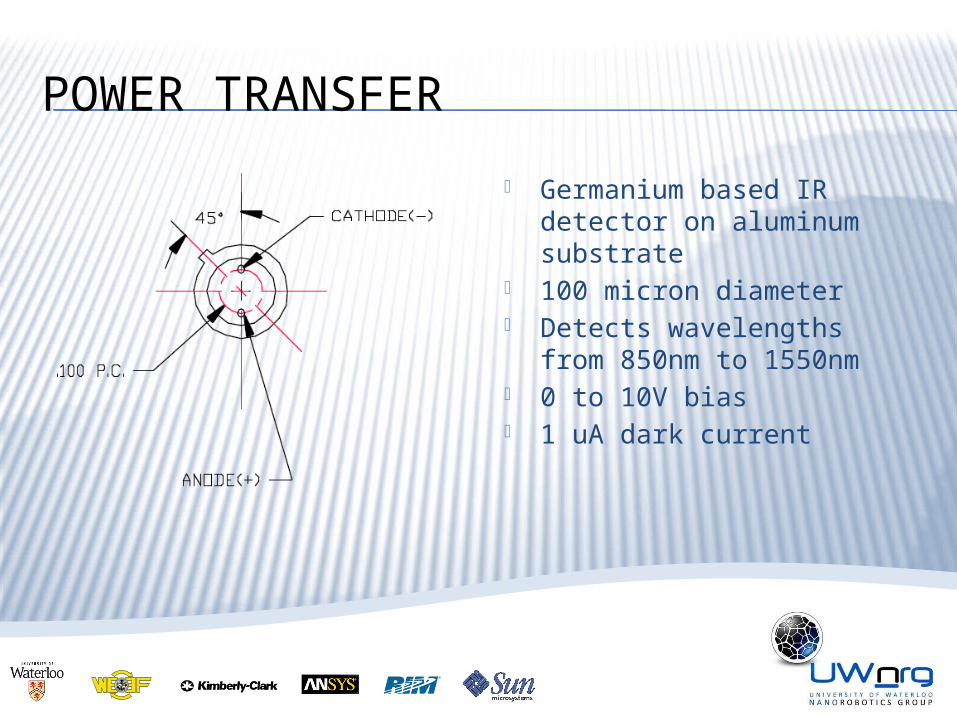
POWER TRANSFER
Germanium based IR detector on aluminum substrate
100 micron diameter Detects wavelengths from
850nm to 1550nm 0 to 10V bias 1 uA dark current
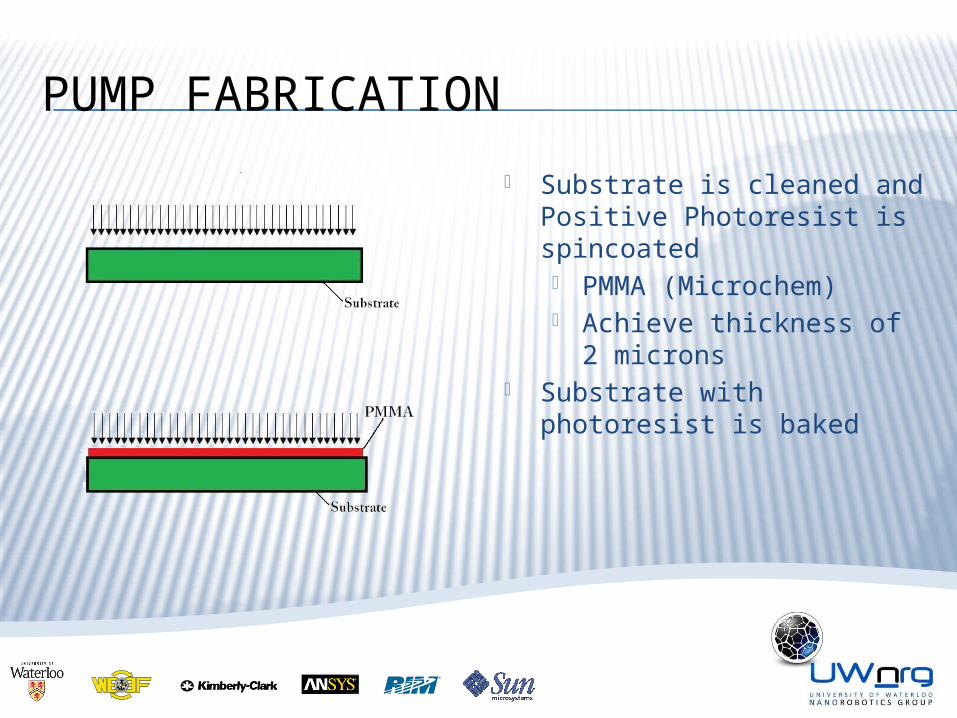
PUMP FABRICATION
Substrate is cleaned and Positive Photoresist is spincoated PMMA (Microchem) Achieve thickness of 2 microns
Substrate with photoresist is baked
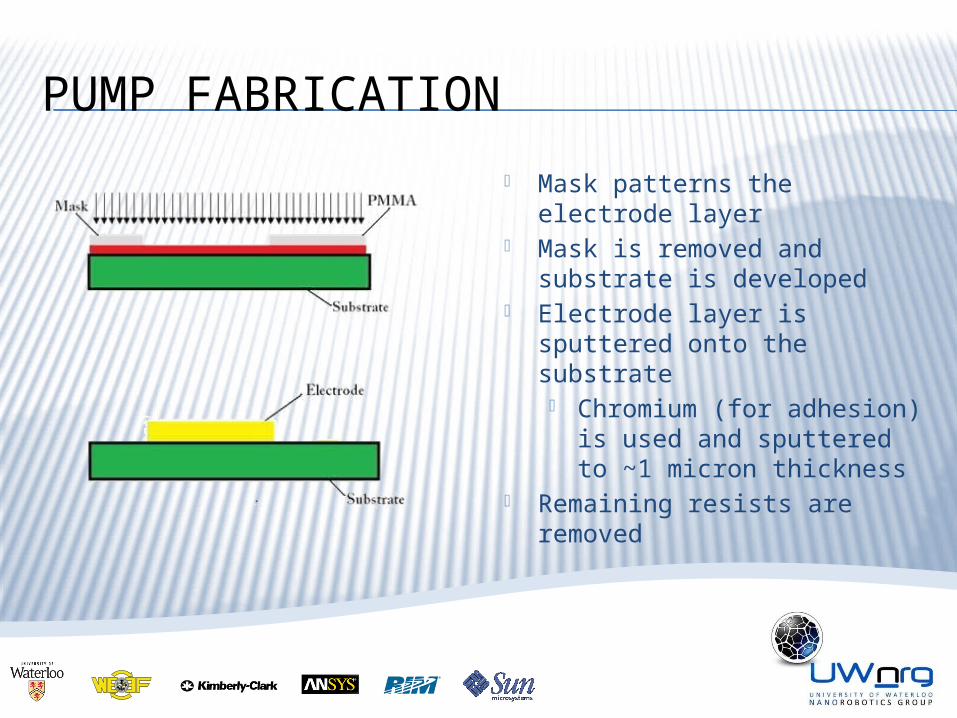
PUMP FABRICATION
Mask patterns the electrode layer Mask is removed and substrate is
developed Electrode layer is sputtered onto
the substrate Chromium (for adhesion) is
used and sputtered to ~1 micron thickness
Remaining resists are removed
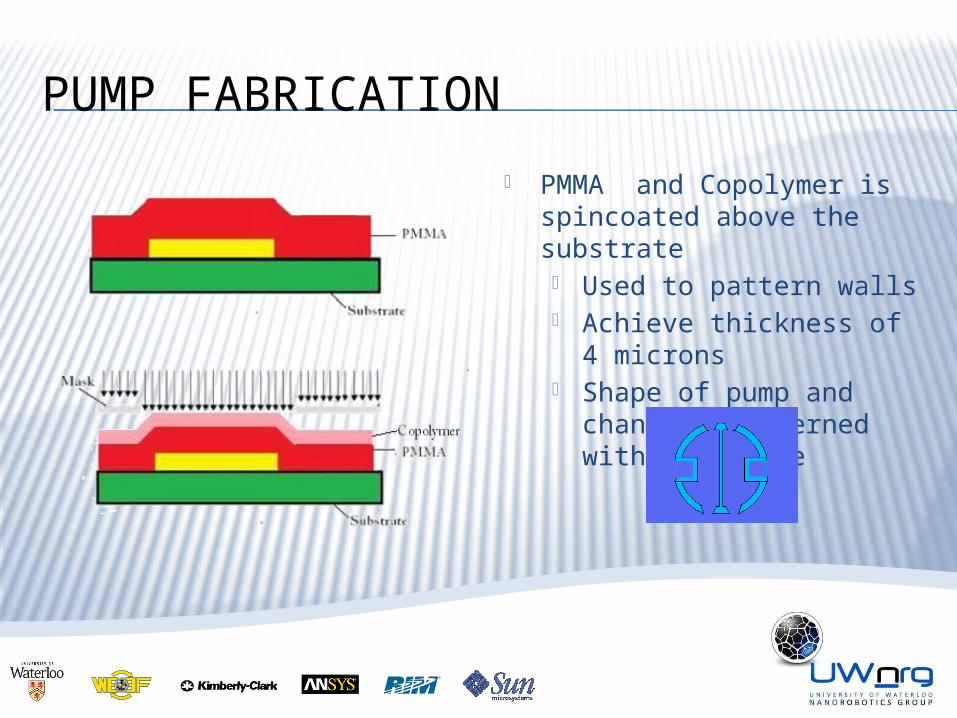
PUMP FABRICATION
PMMA and Copolymer is spincoated above the substrate Used to pattern walls Achieve thickness of 4 microns Shape of pump and channels
patterned with “v”-shape
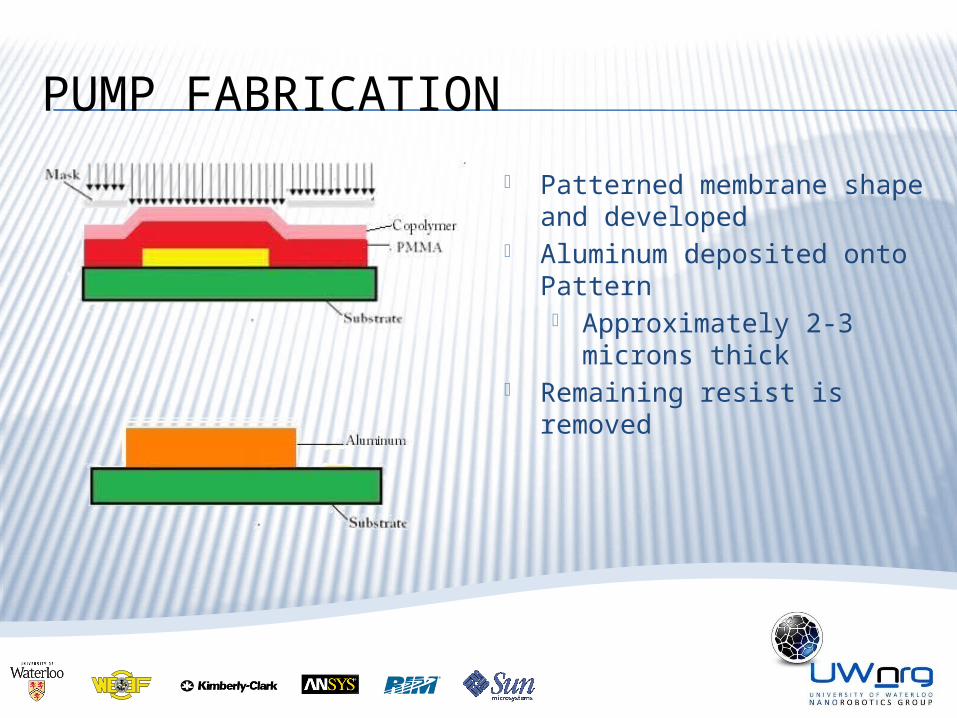
PUMP FABRICATION
Patterned membrane shape and developed
Aluminum deposited onto Pattern Approximately 2-3 microns thick
Remaining resist is removed
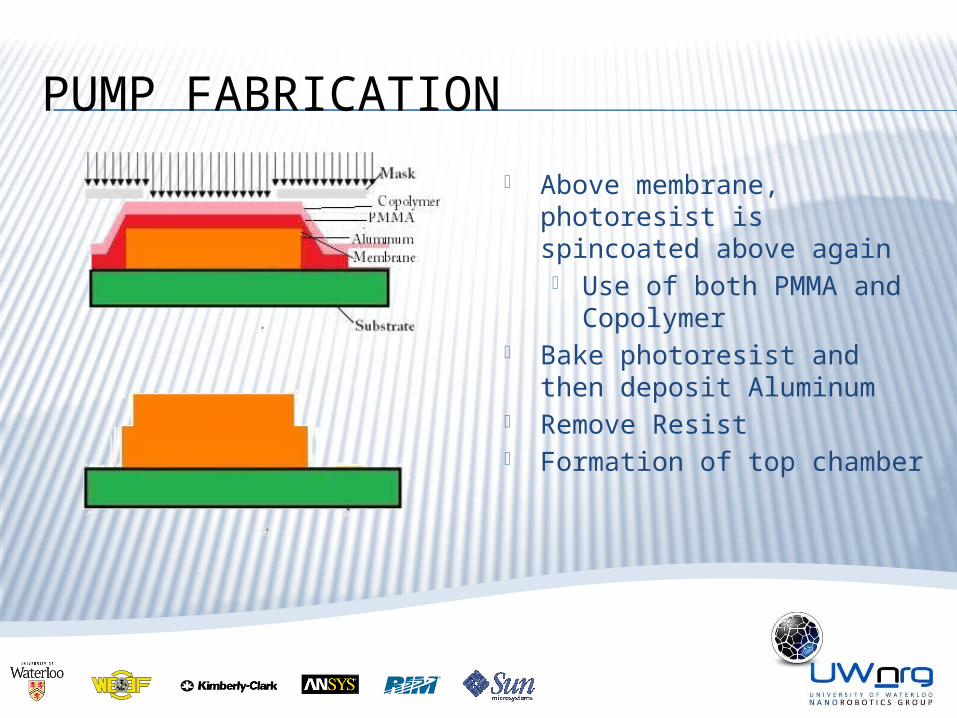
PUMP FABRICATION
Above membrane, photoresist is spincoated above again Use of both PMMA and
Copolymer Bake photoresist and then deposit
Aluminum Remove Resist Formation of top chamber
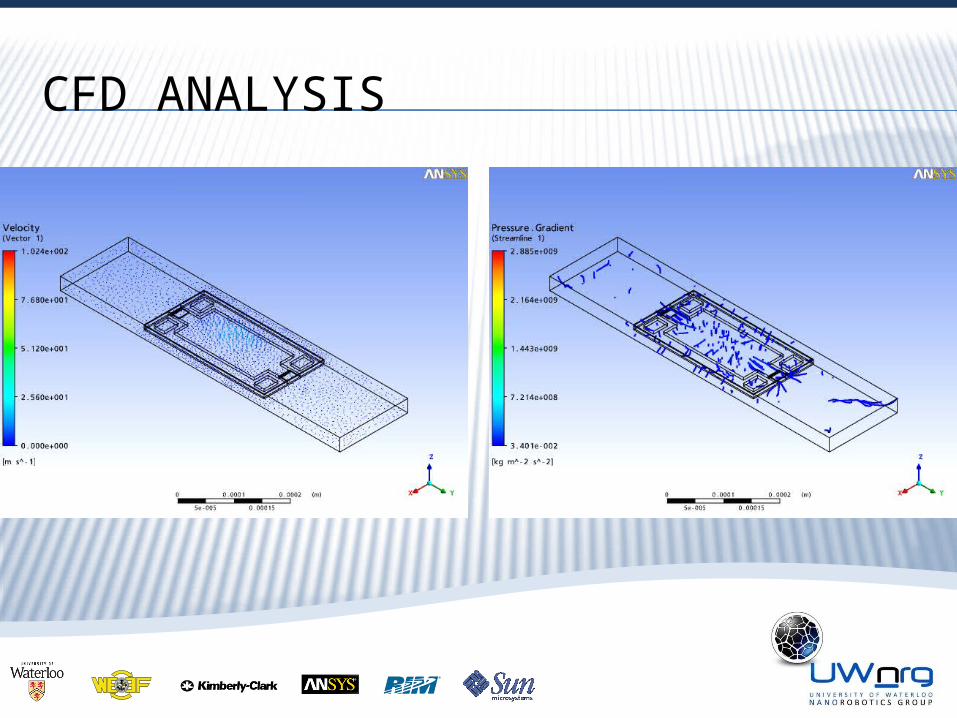
CFD ANALYSIS
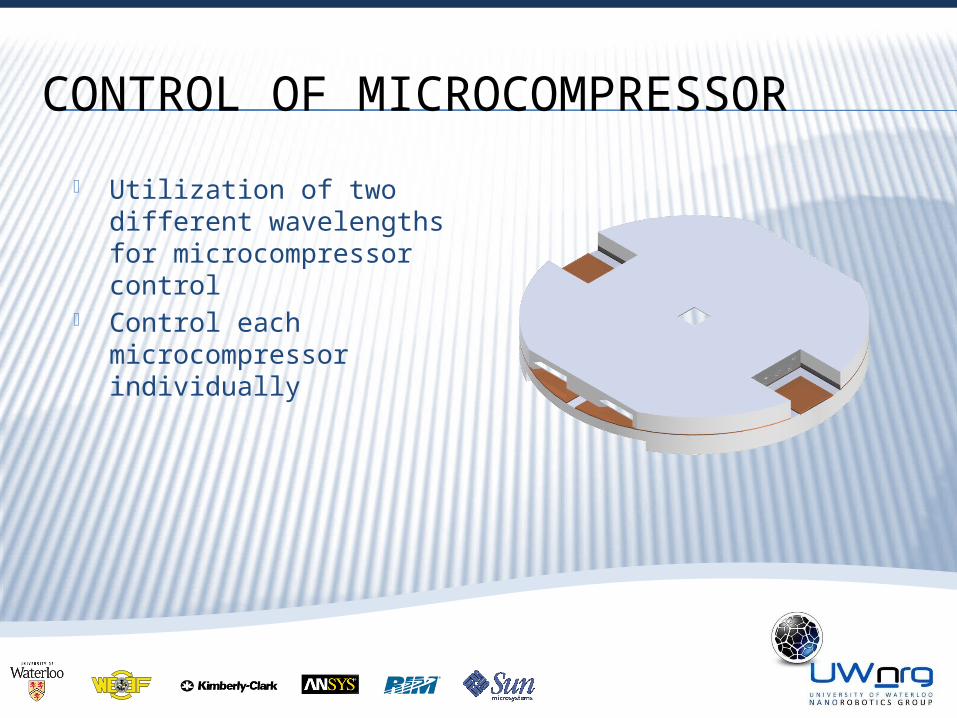
CONTROL OF MICROCOMPRESSOR
Utilization of two different wavelengths for microcompressor control
Control each microcompressor individually
NEXT STEPS
Complete solar array design for integration onto robot Theoretical design will be outsourced to a photovoltaic foundry for
fabrication Development of a thin-film RF antenna has begun to use inductive
coupling as a method of power transfer Biocompatibility materials studies Surface interaction optimization for robotic device movement