metodos n´ ao param˜ etricos´ exerc´ıcios matlabjbosco/ia856/trans_naoparametrico05.pdf ·...
TRANSCRIPT

UNIVERSIDADE ESTADUAL DE CAMPINASFACULDADE DE ENGENHARIA ELETRICA E DE COMPUTACAO
Metodos Nao Parametricos
Exercıcios MATLAB
IA-856 Identificacao e Filtragem
arquivo trans naoparametrico05.tex
8 de maio de 2006

EA-856 - Metodos Nao Parametricos 1
exercıcio completo utilizando as rotinas do toolbox:
System Identification
rotinas: declaracao de conjunto de dados e tratamento:
iddata.m, detrend.m,
identificacao nao-parametrica da resposta ao impulso:
impulse.m, cra.m,
identificacao nao-parametrica via resposta em frequencia:
spa.m, etfe.m.
rotinas auxiliares do toolbox:
Control System
rotinas: zpk.m, tf.m, c2d.m, bode.m.
problema: Obter a identificacao nao-parametrica determinando-se a resposta ao im-
pulso e a reposta em frequencia de um sistema de interesse, a partir de um conjunto de
dados de entrada (u) e saıda medida (y), conforme o diagrama de blocos:
e
uy
Gu(s)
Gr(s)
Figura 1: u – entrada acessıvel; e – ruıdo; y – saıda medida

2 EA-856 - Exercıcios MATLAB
Sistema na forma:
Y (s) = Gu(s)U(s) + Gr(s)E(s) ou,
Y (z) = Gu(z)U(z) + Gr(z)E(z), forma amostrada
onde
Gu(z) =Nu(z)
Du(z), Ge(z) =
Nr(z)
Dr(z)
Fases do Experimento: Fase 1: Acionar o sistema com entradas apropriadas para captu-
rar a dinamica no conjunto de dados [y(k)u(k)], k = 1, . . . , N
Fase 2: Obtencao do modelo nao-parametrico (resposta ao
impulso)
Fase 3: Obtencao do modelo nao-parametrico (resposta em
frequencia)
Fase 4: Verificacao do modelo obtido frente ao modelo
“ideal”utilizado no Simulink
fase 1: Sistema escolhido
Gu(s) =272
(s + 4)(s2 + 4s + 68)
Ruıdo e filtrado pela f.t. dada por
Ge(s) =30s + 2400
s2 + 100s + 2400
clear all, close all
Gu=tf([272], conv([1 4],[1 4 68])) % Sistema Continuo a ser Identificado
impulse(Gu), pause % resposta ao impulso
step(Gu), pause % resposta ao degrau

EA-856 - Metodos Nao Parametricos 3
Impulse Response
Time (sec)
Am
plitu
de
0 0.5 1 1.5 2 2.5−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
Step Response
Time (sec)
Am
plitu
de
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
1
1.2
1.4
Figura 2: Resposta ao impulso e ao degrau de Gu
Impulse Response
Time (sec)
Am
plitu
de
0 0.5 1 1.5 2 2.5−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Step Response
Time (sec)
Am
plitu
de
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.80
0.2
0.4
0.6
0.8
1
1.2
1.4
Figura 3: Resposta ao impulso e ao degrau da versao amostrada de Gu
Geracao dos dados amostrados. Escolheu-se o perıodo de amostragem Ts = 0, 05 s. e
a entrada de excitacao do sistema.
% Sistema amostrado
Ts=0.05 % periodo de amostragem
Gud=c2d(Gu,Ts) % converte sistema contınuo --> discreto
impulse(Gud), pause % plota a resposta ao impulso
step(Gud), pause % plota a resposta ao degrau
Assim a f.t. Gu(z) fica definida como:

4 EA-856 - Exercıcios MATLAB
>> Gud= zpk(Gud)
Zero/pole/gain:
0.0050891 (z+3.348) (z+0.2446)
-----------------------------------
(z-0.8187) (z^2 - 1.667z + 0.8187)
Sampling time: 0.05
Com essa escolha, o sistema amostrado global fica sendo:
(z − 0.8187)(z2− 1.667z + 0.8187)Y (z) =
0.0050891(z + 3.348)(z + 0.2446)U(z) + Ef(z)
(z2− 0.1851z + 0.006738)Ef(z) = (0.8219z − 0.000275)E(z)
e podemos reconhecer os polinomios na forma
Du(z)Y (z) = Nu(z)z−nU(z) + Ef(z)
Dr(z)Ef(z) = Nr(z)E(z)

EA-856 - Metodos Nao Parametricos 5
implementacao no Simulink:
3
Saída Amostrada
2
Entrada Amostrada
1
Saída Contínua
z
1
Unit Delay1
z
1
Unit Delay
30s+2400
s +100s+24002
Transfer Fcn3
68
s +4s+682
Transfer Fcn2
4
s+4
Transfer Fcn1
Band-LimitedWhite Noise
1
In1
Figura 4: Diagrama Simulink do Sistema com entrada comandada e ruıdo.
Table 1. Continuous White Noise. Block PropertiesName Cov Ts seed VectorParams1D
Band-Limited White Noise [pr1] 0.005 [23341] on
Table 2. Inport Block PropertiesName Port PortDimensions SampleTime Defined In
In1 1 -1 -1 Sum1
Table 3. Mux Block PropertiesName Inputs DisplayOptionMux 2 bar
Table 4. Outport Block PropertiesName Port OutputWhenDisabled InitialOutput Used By
Entrada Amostrada 2 held [] Sinal AmostradoSaıda Amostrada 3 held [] Sinal AmostradoSaıda Contınua 1 held [] Sinal Contınuo
Table 5. Sum Block PropertiesName IconShape Inputs InputSameDT OutDataTypeModeSum round ++ off Inherit via internal rule
Table 6. TransferFcn Block PropertiesName Numerator Denominator AbsoluteTolerance
Transfer Fcn1 [68] [1 4 68] autoTransfer Fcn2 [4] [1 4] autoTransfer Fcn3 [30 2400] [1 100 2400] auto
Table 7. Unit Delay Block PropertiesName SampleTime
Unit Delay TsUnit Delay1 Ts
atencao:
1) No bloco “digital clock”adotar como parametro o perıodo de amostragem Ts.
2) Na janela de simulacao, acesse “Simulation”, depois “Configuration Parameters”, seleci-one “Data Importa/Export”. No quadro “Save Options” desabilite a opcao “Limit data pointsto last:”

6 EA-856 - Exercıcios MATLAB
fase 2: Simulacao e geracao do conjunto de dados para identificacao do sistema esco-
lhido
definir a entrada do sistema a ser identificado:
Figura 5: Diagrama Simulink com entrada definida pelo “Signal Builder”.
Valores definidos no Signal Buider
% tempo de simulac~ao = 90s.:
Axes > change Time Range ... Min. time 0, Max. time 90
% sinal PBRN:
Signal > New > Pseudo random noise ... Frequency 10.0,
Upper value +5, Lower Value -5
O sistema esta pronto para ser simulado e gerar a sequencia de dados durante 90s.
%% Define os dados de inicializac~ao do sistema
%% No Diagrama Simulink:
%% Simulation > Simulation Parameters ... Stop Time: Tsim
%% Band-Limited White Noise > Noise Power: [pr1]
clear, close all
Tsim=90; % tempo total de simulac~ao
Ts=0.07; % periodo de amostragem
pr1=0.05; % potencia do sinal gaussiano de faixa limitada
sim(’nome_do_arquivo_simulink’)

EA-856 - Metodos Nao Parametricos 7
% para obter somente um valor do ponto amostrado
tdisc=yout(:,1); % vetor do tempos utilizados pela rotina de integrac~ao
tadi=[tdisc; tdisc(max(size(tdisc)))];
tatr=[0;tdisc];
ind=find(tadi>tatr);
tdisc=tdisc(ind); % vetor do tempos contendo amostras espacadas de Ts
% definicao dos sinais amostrados espacados de Ts
udisc=yout(ind,2); ydisc=yout(ind,3);
0 2 4 6 8 10 12 14 16 18 20−10
−5
0
5
10
0 2 4 6 8 10 12 14 16 18 20−10
−5
0
5
10
Figura 6: Saıda y e entrada u em 20 s.
fase 3: Obtencao do modelo nao-parametrico (resposta ao impulso)
E necessario remover valores constantes dos dados de entrada e saıda antes de pro-
cessa-los.
%%pre-processamento dos dados
udisc=udisc-mean(udisc); ydisc=ydisc-mean(ydisc); % elimina a media dos dados

8 EA-856 - Exercıcios MATLAB
primeiro metodo: resposta ao impulso pelo metodo da convolucao
% identifica a primeira amostra para a qual a entrada n~ao e nula
tini=min(find(udisc(:,1)~=0));
tfin=max(size(tdisc)); % define o ultimo valor de interesse da amostra
U=[]; % inicializacao da matriz de entradas
J=60; % numero total de amostras a ser consideradas na
% identificac~ao da resposta ao impulso (= J+1)
% ciclos de construc~ao da matriz U a partir da definic~ao das linhas
taux=tini;
while taux<=tfin && (taux-J)<1
U=[U; [udisc(taux:-1:1)’ zeros(1,-taux+J+1)]];
taux=taux+1;
end
while taux<=tfin
U=[U; udisc(taux:-1:(taux-J))’];
taux=taux+1;
end
% gera a estimativa da resposta ao impulso
mask=tini:(taux-1);
h1=U\ydisc(mask);
figure, stem(0:Ts:(Ts*J),h1/Ts), hold on, plot(t,h,’-r’)
% h1 resposta ao impulso estimada pelo metodo da convoluc~ao
% h resposta ao impulso original do sistema

EA-856 - Metodos Nao Parametricos 9
fase 4: Verificacao do modelo obtido frente ao modelo “ideal”
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5metodo da convoluçao
Figura 7: Resposta ao impulso estimada pelo metodo da convolucao e a curva original.
segundo metodo: resposta ao impulso pelo metodo da convariancia
Iremos utilizar a estrutura de dados apropriada ao toolbox de identificacao.
% declara uma estrutura de dados tendo ydisc como saıda
% e udisc como entrada:
dat1=iddata(ydisc,udisc,Ts);
datm1=detrend(dat1,’constant’); % elimina a media dos dados e da nome aos bois
set(datm1,’InputName’,’entrada de acionamento’,’OutputName’,’torque em Nm’)
A rotina Matlab covf serve para estimar as funcoes de correlacao existentes na estrutura
de dados dat1 contendo o vetor [y u] ja pre-processado.
J=60; % no. de maximo de defasagem das func~oes de correlac~ao
% a considerada na estimativa
R1=covf(datm1,J+1); % calcula a matriz de auto-covariancias e covariancias

10 EA-856 - Exercıcios MATLAB
% cruzadas
figure, plot(R1’)
title(’Funcao de Auto-Correlacao e Correlacao Cruzada’)
legend(’r_{yy}’,’r_{uy}’,’r_{yu}’,’r_{uu}’)
0 10 20 30 40 50 60 70−5
0
5
10
15
20
25Funcao de Auto−Correlacao e Correlacao Cruzada
ryy
ruy
ryu
ruu
Figura 8: Funcoes de auto-correlacao e correlacao cruzadas de y e u.
Para a construcao da matriz de autocorrelacao Ruu na forma adequada:
Ruu =
ruu(0) ruu(1) ruu(2) · · · ruu(F )ruu(1) ruu(0) ruu(1) · · · ruu(F − 1)ruu(2) ruu(1) ruu(0) · · · ruu(F − 2)
......
.... . .
...ruu(F ) ruu(F − 1) ruu(F − 2) · · · ruu(0)
a rotina Matlab toeplitz deve ser usada.
Ruy1=R1(2,:); % funcao de correlacao cruzada entre u e y
Ru1=R1(4,:); % funcao de autocorrelacao de u
MRu1=toeplitz(Ru1) % produz a matriz de autocorrelacao de u, p.ex.:
>>MRu1 =

EA-856 - Metodos Nao Parametricos 11
1.0000 -0.0120 -0.0050 0.0040 0.0050 0.0060
-0.0120 1.0000 -0.0120 -0.0050 0.0040 0.0050
-0.0050 -0.0120 1.0000 -0.0120 -0.0050 0.0040
0.0040 -0.0050 -0.0120 1.0000 -0.0120 -0.0050
0.0050 0.0040 -0.0050 -0.0120 1.0000 -0.0120
0.0060 0.0050 0.0040 -0.0050 -0.0120 1.0000
Passo final: estimacao e verificacao
h1=MRu1\Ruy1’; % estima a resposta ao impulso h1 com J+1 amostras
fase 4: Verificacao do modelo obtido frente ao modelo “ideal”
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5metodo da convariancia
Figura 9: Resposta ao impulso estimada pelo metodo da covariancia e a curva original.

12 EA-856 - Exercıcios MATLAB
outros metodos disponıveis no toolbox de identificacao:
Rotinas cra e impulse
J=60; % ordem do filtro FIR/no. de amostras da resposta ao impulso - 1
% estimacao da resposta ao impulso: metodo 1 (rotina cra)
na=15; % ordem do filtro branqueador
figure, h2=cra(datm1,J,na,2); % determinac~ao da resposta ao impulso & plots
−100 −50 0 50 100−1
0
1
2
3
4
5Covf for filtered y
−100 −50 0 50 100−5
0
5
10
15
20
25Covf for prewhitened u
−100 −50 0 50 100−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5Correlation from u to y (prewh)
−100 −50 0 50 100−1
0
1
2
3Impulse response estimate
Figura 10: Funcoes de auto-correlacao e correlacao cruzadas de y e u filtrados e estimativa da
resposta ao impulso dada pela rotina cra.
% outras formas graficas:
figure, h2=cra(datm1,J,na,1) % resposta com intervalo de confianca

EA-856 - Metodos Nao Parametricos 13
0 10 20 30 40 50 60−1
−0.5
0
0.5
1
1.5
2
2.5
3Impulse response estimate
lags
Figura 11: Resposta ao impulso estimada pela pela rotina cra com intervalo de confianca.
figure, stem(0:Ts:(Ts*(size(h2)-1)),h2/Ts), hold on, plot(t,h,’-r’)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5metodo cra do Matlab
Figura 12: Resposta ao impulso estimada pela pela rotina cra comparacao com a curva original.

14 EA-856 - Exercıcios MATLAB
% estimacao da resposta ao impulso: metodo 2 (rotina impulse)
h3=impulse(datm1); % determinacao da resposta ao impulso
figure, impulse(datm1,’sd’,1); % plot com intervalos de confianca
−2 −1 0 1 2 3 4−1
−0.5
0
0.5
1
1.5
2
2.5
3From entrada de acionamento
To
torq
ue e
m N
m
Figura 13: Estimativa da resposta ao impulso com regiao de confianca: rotina impulse.

EA-856 - Metodos Nao Parametricos 15
% extrai as 1as. M amostras nao antecipativas da resposta ao impulso h3
% para efeito de comparac~ao:
h3=h3.B((-h3.InputDelay+1):(h3.nb)); h3=h3(:);
figure, stem(0:Ts:(Ts*(size(h3)-1)),h3/Ts), hold on, plot(t,h,’-r’)
0 0.5 1 1.5 2 2.5 3 3.5 4−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5metodo impulse do Matlab
Figura 14: Resposta ao impulso estimada pela pela rotina impulse e a curva original.

16 EA-856 - Exercıcios MATLAB
domınio da frequencia
exercıcios utilizando as rotinas do toolbox: System Identification
rotinas: spa.m, etfe.m, bode.m
Utilizamos os mesmos dados obtidos na fase 1 do experimento no domınio do tempo.
A rotina spa.m e um procedimento de resposta em frequencia atraves de analise espec-
tral
O parametro M na rotina controla o tamanho da janela de dados utilizados. Se M = [ ]utiliza-se o valor default da rotina que e min(length(DATA)/10,30)
M=[]; % tamanho da janela usada no calculo
modf=spa(ddat,M); % gera o modelo em frequencia a partir dos dados ddat
% resposta em frequencia de gud com intervalo de confianca:
figure(6), clf bode(modf,3)
10−1
100
101
102
10−4
10−3
10−2
10−1
100
Am
plitu
de
From entrada de acionamento to torque em Nm
10−1
100
101
102
−300
−200
−100
0
100
200
300
400
Pha
se (
degr
ees)
Figura 15: Respostas em frequencia: rotina spa com intervalo de confianca.

EA-856 - Metodos Nao Parametricos 17
% espectro do ruıdo com intervalo de confianca:
figure(7), clf bode(modf(’noise’),3)
10−1
100
101
102
10−3
10−2
10−1
100
Disturbance spectrum for output torque em Nm
Figura 16: Estimativa do espectro de frequencia do ruıdo: rotina spa com intervalo de confianca.
segundo metodo frequencial: rotina etfe
A rotina etfe, calcula a transformada discreta de Fourier utilizando FFT (fast Fourier
transform)
%% procedimento de estimacao da resposta em frequencia via FFT
M=12; %tamanho da janela usada no calculo
modfe=etfe(ddat,M);
Para comparacao tracamos as figuras a seguir, utilizando os comandos:
figure(8),clf
bode(modf,modfe)
legend(’rotina spa M=[]’,’rotina etfe M=12’)
figure(9),clf
bode(Gud)

18 EA-856 - Exercıcios MATLAB
10−1
100
101
102
10−4
10−3
10−2
10−1
100
Am
plitu
de
From entrada de acionamento to torque em Nm
10−1
100
101
102
−300
−200
−100
0
100
200
300
400
Pha
se (
degr
ees)
rotina spa M=[]rotina etfe M=12
(a)Bode Diagram
Frequency (rad/sec)
Pha
se (
deg)
Mag
nitu
de (
dB)
−60
−50
−40
−30
−20
−10
0
100
101
−450
−360
−270
−180
−90
0
(b)
Figura 17: (a) Comparacao das respostas obtidas pelas rotina: spa (azul) com a etfe (em
verde). Tamanho de janela M indicado. (b) Reposta em frequencia do sistema “ideal”gud.
EA-856 - Metodos Nao Parametricos 19
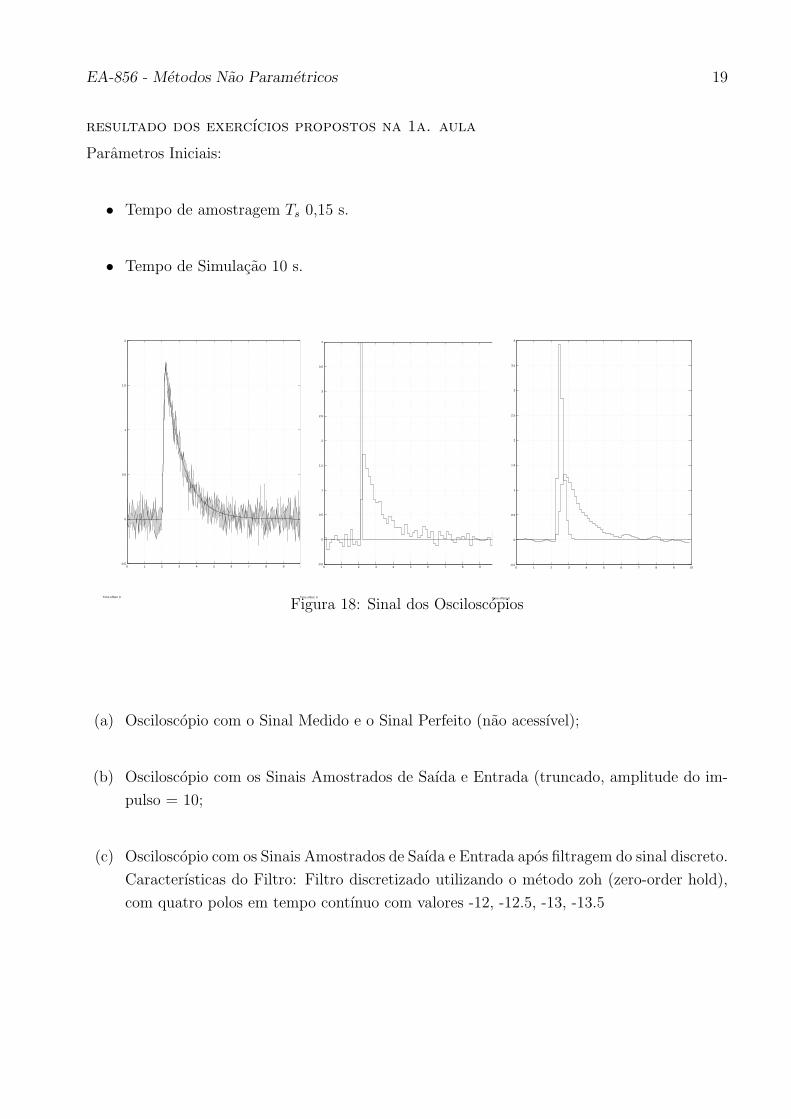
resultado dos exercıcios propostos na 1a. aula
Parametros Iniciais:
• Tempo de amostragem Ts
0,15 s.
• Tempo de Simulacao 10 s.
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
1.5
2
Time offset: 0
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Time offset: 0
0 1 2 3 4 5 6 7 8 9 10-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Time offset: 0
Figura 18: Sinal dos Osciloscopios
(a) Osciloscopio com o Sinal Medido e o Sinal Perfeito (nao acessıvel);
(b) Osciloscopio com os Sinais Amostrados de Saıda e Entrada (truncado, amplitude do im-
pulso = 10;
(c) Osciloscopio com os Sinais Amostrados de Saıda e Entrada apos filtragem do sinal discreto.
Caracterısticas do Filtro: Filtro discretizado utilizando o metodo zoh (zero-order hold),
com quatro polos em tempo contınuo com valores -12, -12.5, -13, -13.5

20 EA-856 - Exercıcios MATLAB
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
1.2metodo da resposta ao impulso
Ts=0.15, Ampl. do Impulso=10
Gerador de Ruidos:
potencia 0.0001, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 19: Resultado do Metodo da Resposta ao Impulso.
• Alteracao do Experimento: Amplitude do Impulso e alterado de 10 para 30. Resultado:
A relacao sinal ruıdo e melhorada.
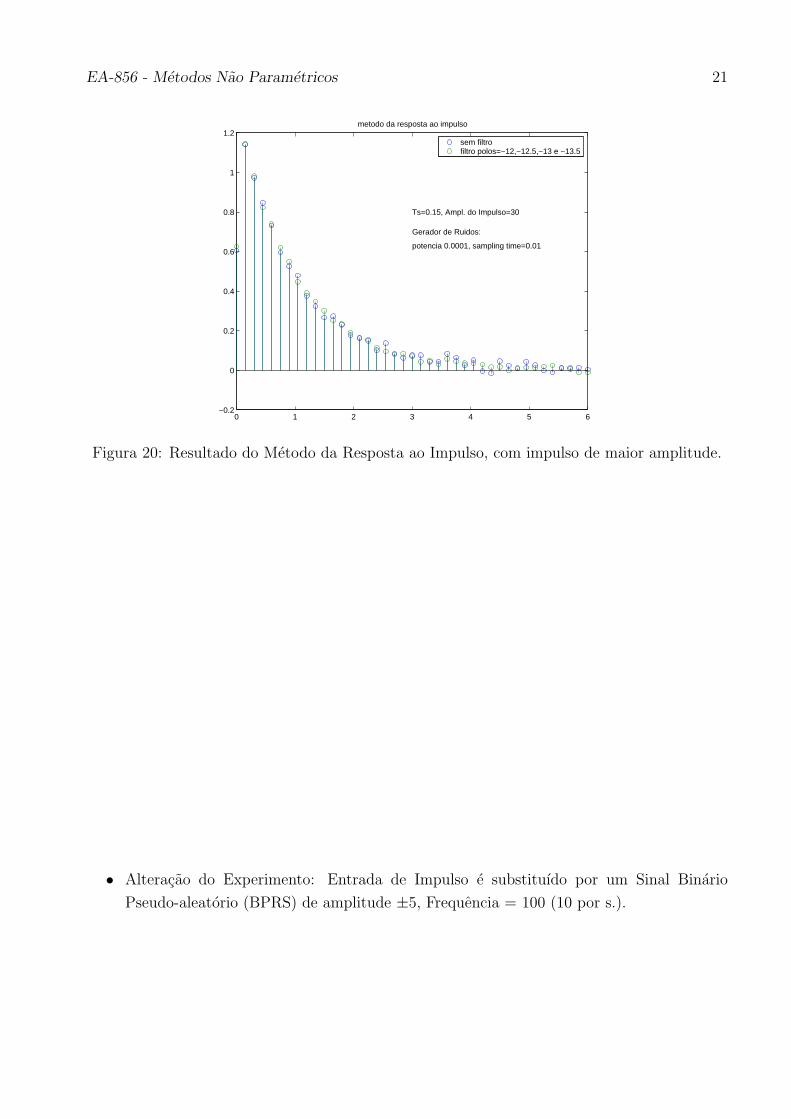
EA-856 - Metodos Nao Parametricos 21
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
1.2metodo da resposta ao impulso
Ts=0.15, Ampl. do Impulso=30
Gerador de Ruidos:
potencia 0.0001, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 20: Resultado do Metodo da Resposta ao Impulso, com impulso de maior amplitude.
• Alteracao do Experimento: Entrada de Impulso e substituıdo por um Sinal Binario
Pseudo-aleatorio (BPRS) de amplitude ±5, Frequencia = 100 (10 por s.).

22 EA-856 - Exercıcios MATLAB
0 1 2 3 4 5 6−0.4
−0.2
0
0.2
0.4
0.6
0.8
1metodo da resposta ao impulso com entrada PRBS Tsim=10 s
Ts=0.10, Ampl. do Sinal PBRS=+−5
Gerador de Ruidos:
potencia 0.0001, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 21: Resultado do Metodo da Resposta ao Impulso, com sinal BPRS.

EA-856 - Metodos Nao Parametricos 23
metodo de covariancia
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
1.2metodo da covariancia
Ts=0.15, Ampl. do Impulso=10
Gerador de Ruidos:
potencia 0.0001, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 22: Resultado do Metodo da Covariancia: dados ajustados como nas Figs. 1 e 2 do
metodo da resposta ao impulso.

24 EA-856 - Exercıcios MATLAB
0 1 2 3 4 5 6−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2metodo da covariancia com entrada PRBS Tsim=10 s
Ts=0.10, Ampl. do Sinal PBRS=+−5
Gerador de Ruidos:
potencia 0.0001, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 23: Resultado do Metodo da Covariancia, com sinal BPRS. Dados ajustados como na
Fig. 4.
• Alteracao do Experimento: Tempo de Simulacao Tsim e aumentado de 10s. para 30s.

EA-856 - Metodos Nao Parametricos 25
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
1.2metodo da resposta ao impulso com entrada PRBS Tsim=30 s
Ts=0.10, Ampl. do Sinal PBRS=+−5
Gerador de Ruidos:
potencia 0.0001, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 24: Resultado do Metodo da Resposta ao Impulso: Tsim = 30s.
0 1 2 3 4 5 6−0.2
0
0.2
0.4
0.6
0.8
1
1.2metodo da covariancia com entrada PRBS Tsim=30 s
Ts=0.10, Ampl. do Sinal PBRS=+−5
Gerador de Ruidos:
potencia 0.0001, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 25: Resultado do Metodo da Covariancia: Tsim = 30s.
• Alteracao do Experimento: Potencia do Ruıdo e aumentada de 0,0001 para 0,005.

26 EA-856 - Exercıcios MATLAB
0 1 2 3 4 5 6−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4metodo da resposta ao impulso com entrada PRBS Tsim=30 s
Ts=0.10, Ampl. do Sinal PBRS=+−5
Gerador de Ruidos:potencia 0.005, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 26: Resultado do Metodo da Resposta ao Impulso: Potencia do ruıdo aumentada.
0 1 2 3 4 5 6−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4metodo da covariancia com entrada PRBS Tsim=30 s
Ts=0.10, Ampl. do Sinal PBRS=+−5
Gerador de Ruidos:potencia 0.005, sampling time=0.01
sem filtrofiltro polos=−12,−12.5,−13 e −13.5
Figura 27: Resultado do Metodo da Covariancia: Potencia do ruıdo aumentada.