lunar exploration transportation system (lets)
DESCRIPTION
Lunar Exploration Transportation System (LETS). MAE 491 / 492 2008 IPT Design Competition Instructors: Dr. P.J. Benfield and Dr. Matt Turner Team Frankenstein Final Review Presentation 4/29/08. Team Disciplines. The University of Alabama in Huntsville Team Leader: Matt Isbell - PowerPoint PPT PresentationTRANSCRIPT

Lunar Exploration Transportation System (LETS)
MAE 491 / 4922008 IPT Design Competition
Instructors: Dr. P.J. Benfield and Dr. Matt Turner
Team Frankenstein
Final Review Presentation4/29/08
Team Disciplines• The University of Alabama in Huntsville
– Team Leader: Matt Isbell– Structures: Matthew Pinkston and Robert Baltz– Power: Tyler Smith– Systems Engineering: Kevin Dean– GN&C: Joseph Woodall– Thermal: Thomas Talty– Payload / Communications: Chris Brunton– Operations: Audra Ribordy
• Southern University– Mobility: Chase Nelson and Eddie Miller
• ESTACA– Sample Return: Kim Nguyen and Vincent Tolomio

Agenda
• Project Office• Systems Engineering• The Need• The Requirements• The Solution• Performance• Operations• Structures
• GN&C• Communications• Payload• Power• Thermal• Conclusions• Questions

Project Office
Systems Engineering

The Need

The Requirements
The Solution
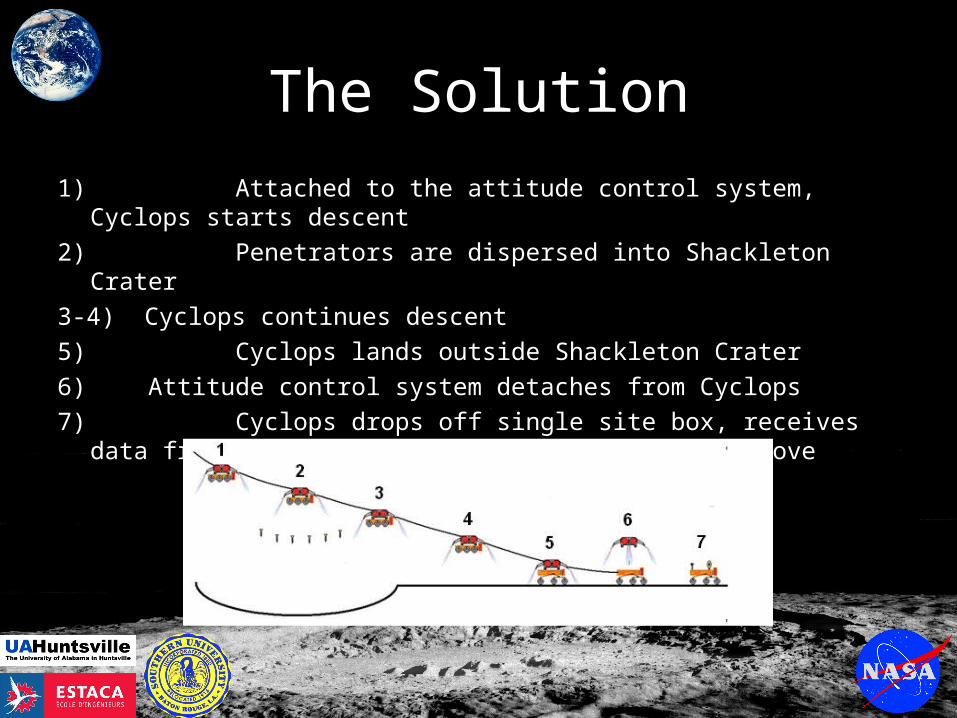
1) Attached to the attitude control system, Cyclops starts descent
2) Penetrators are dispersed into Shackleton Crater
3-4) Cyclops continues descent
5) Cyclops lands outside Shackleton Crater
6) Attitude control system detaches from Cyclops
7) Cyclops drops off single site box, receives data from the penetrators, then begins to rove
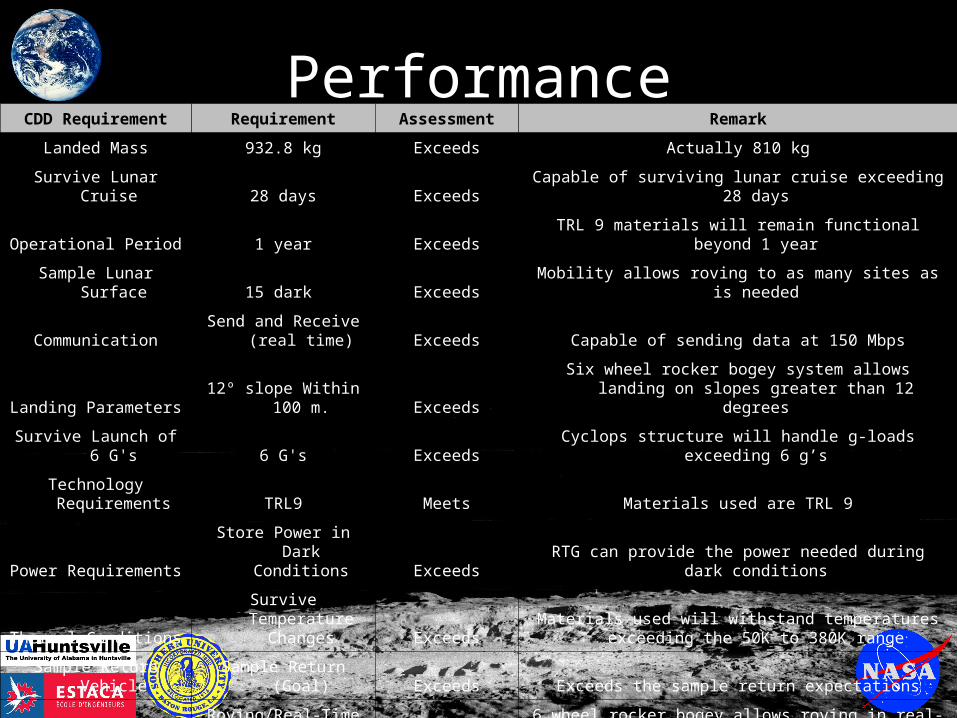
PerformanceCDD Requirement Requirement Assessment Remark
Landed Mass 932.8 kg Exceeds Actually 810 kg
Survive Lunar Cruise 28 days Exceeds Capable of surviving lunar cruise exceeding 28 days
Operational Period 1 year Exceeds TRL 9 materials will remain functional beyond 1 year
Sample Lunar Surface 15 dark Exceeds Mobility allows roving to as many sites as is needed
CommunicationSend and Receive
(real time) Exceeds Capable of sending data at 150 Mbps
Landing Parameters12º slope Within 100
m. ExceedsSix wheel rocker bogey system allows landing on slopes
greater than 12 degrees
Survive Launch of 6 G's 6 G's Exceeds Cyclops structure will handle g-loads exceeding 6 g’s
Technology Requirements TRL9 Meets Materials used are TRL 9
Power RequirementsStore Power in Dark
Conditions Exceeds RTG can provide the power needed during dark conditions
Thermal ConditionsSurvive Temperature
Changes ExceedsMaterials used will withstand temperatures exceeding the
50K to 380K range
Sample Return Vehicle Sample Return (Goal) Exceeds Exceeds the sample return expectations
MobileRoving/Real-Time
Mobility Exceeds 6 wheel rocker bogey allows roving in real-time

Operations

Structures• Materials
– Aluminum 6061 – T6– Carbon Fiber Composite
• System Specifications (Main)– 6 Wheel Rocker Bogie Mobility System
• 13 in. Outer Diameter Wheels (Aluminum Construction-6061 T6)• Aluminum construction (6061 T6)• Maxon EC 60 Brushless DC motor (60mm) x 6
– Single Site Box• Max Width-60.793 in. • Max Length-27.09 in.• Max Height- 14 in.
– Sample Return Vehicle• Max Diameter- 9 in.• Max Height- 13 in.
– Camera• Dimensions- 12 x 8 x 6
– Main Chassis• Dimensions- 60.793 x 60.793 x 14 in.• Aluminum Frame• Carbon composite exterior• MLI Insulation
– Scoop Arm• Max Reach- 68in.
Before Deployment
After Deployment

GN&C

Communication

Payload
Power
Thermal
Conclusions

Questions