linear stochastic dynamics lecture 5 outline of lecture 5 · linear stochastic dynamics lecture 5...
TRANSCRIPT
Linear Stochastic Dynamics
Lecture 5
1
Outline of Lecture 5
� Stochastic Dynamics of SDOF Systems (cont.).
� Weakly Stationary Response Processes.
� Equivalent White Noise Approximations.
� Gaussian Response Processes as Conditional Normal Distributions.
� Stochastic Dynamics of MDOF Systems.
� Introduction to MDOF Systems.
Linear Stochastic Dynamics
Lecture 5
2
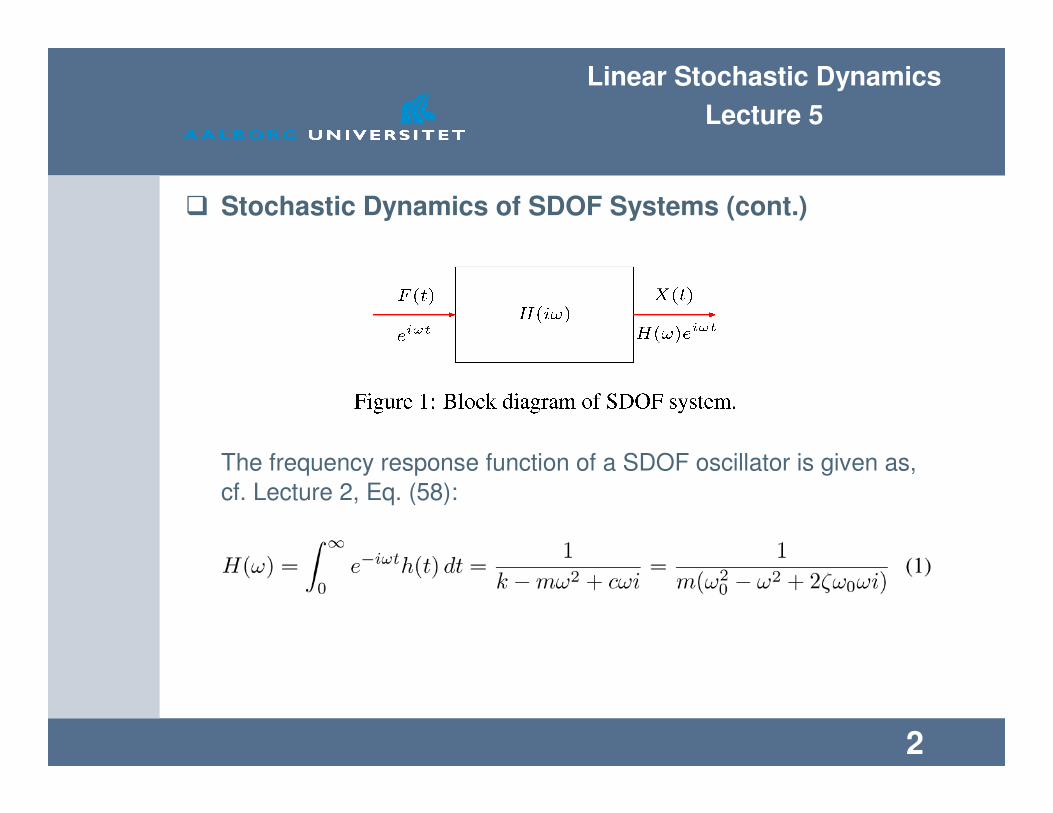
� Stochastic Dynamics of SDOF Systems (cont.)
The frequency response function of a SDOF oscillator is given as,
cf. Lecture 2, Eq. (58):
Linear Stochastic Dynamics
Lecture 5
3
� Weakly Stationary Response Processes
If the load process is weakly or strictly stationary, and
has been applied to the structure in infinite long time , the
displacement process becomes weakly or strictly stationary.
Mean value function:
From Lecture 2, Eq. (54):
From (1), cf. Lecture 2, Eq. (56):
Auto-spectral density function:
From Lecture 2, Eq. (57):
Linear Stochastic Dynamics
Lecture 5
4
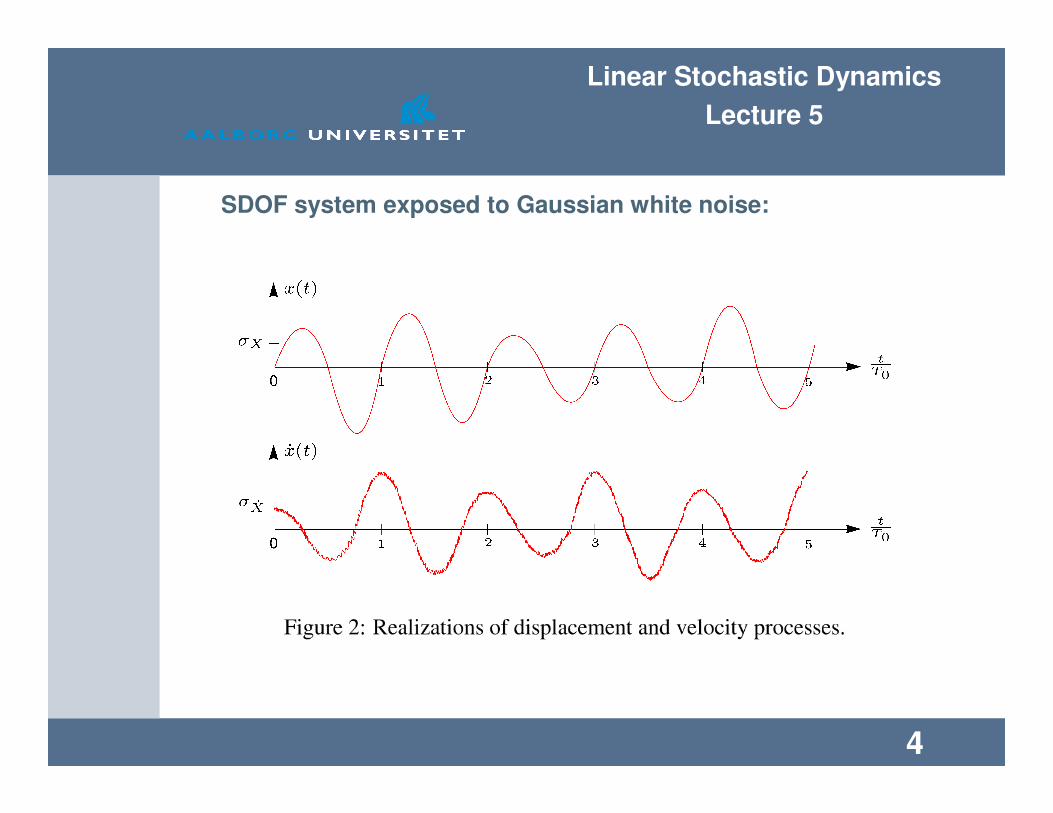
SDOF system exposed to Gaussian white noise:
Linear Stochastic Dynamics
Lecture 5
5
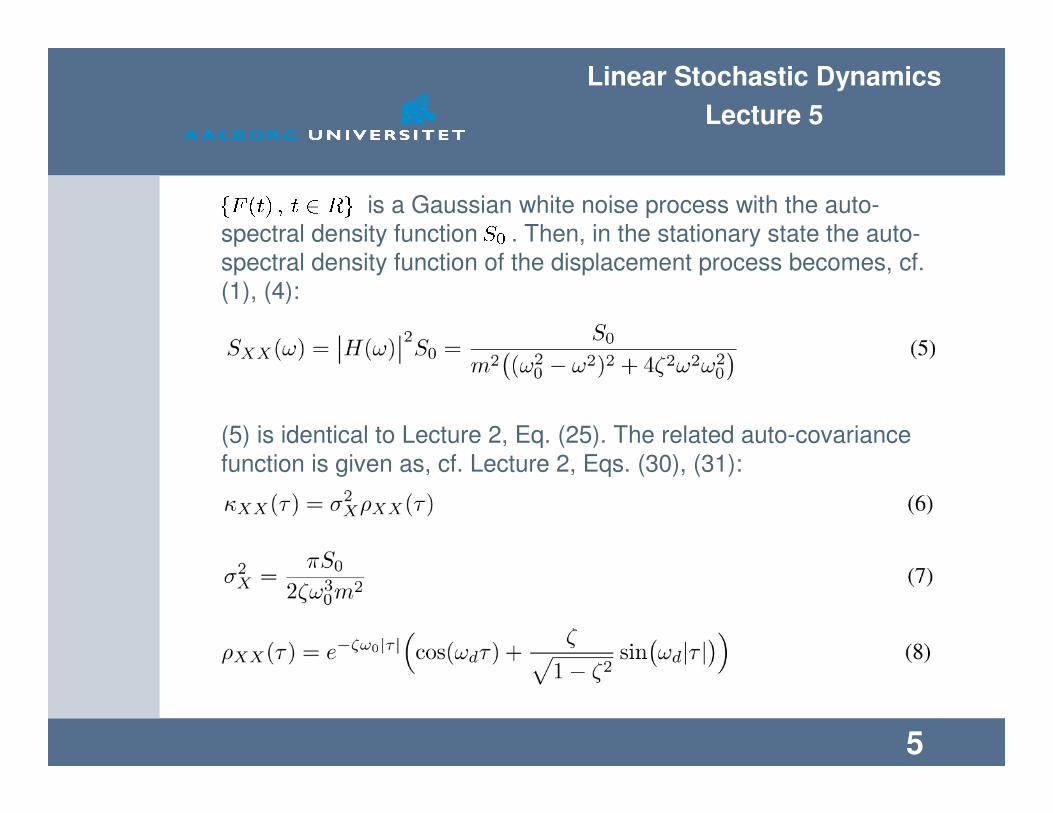
is a Gaussian white noise process with the auto-
spectral density function . Then, in the stationary state the auto-
spectral density function of the displacement process becomes, cf.
(1), (4):
(5) is identical to Lecture 2, Eq. (25). The related auto-covariance
function is given as, cf. Lecture 2, Eqs. (30), (31):
Linear Stochastic Dynamics
Lecture 5
6
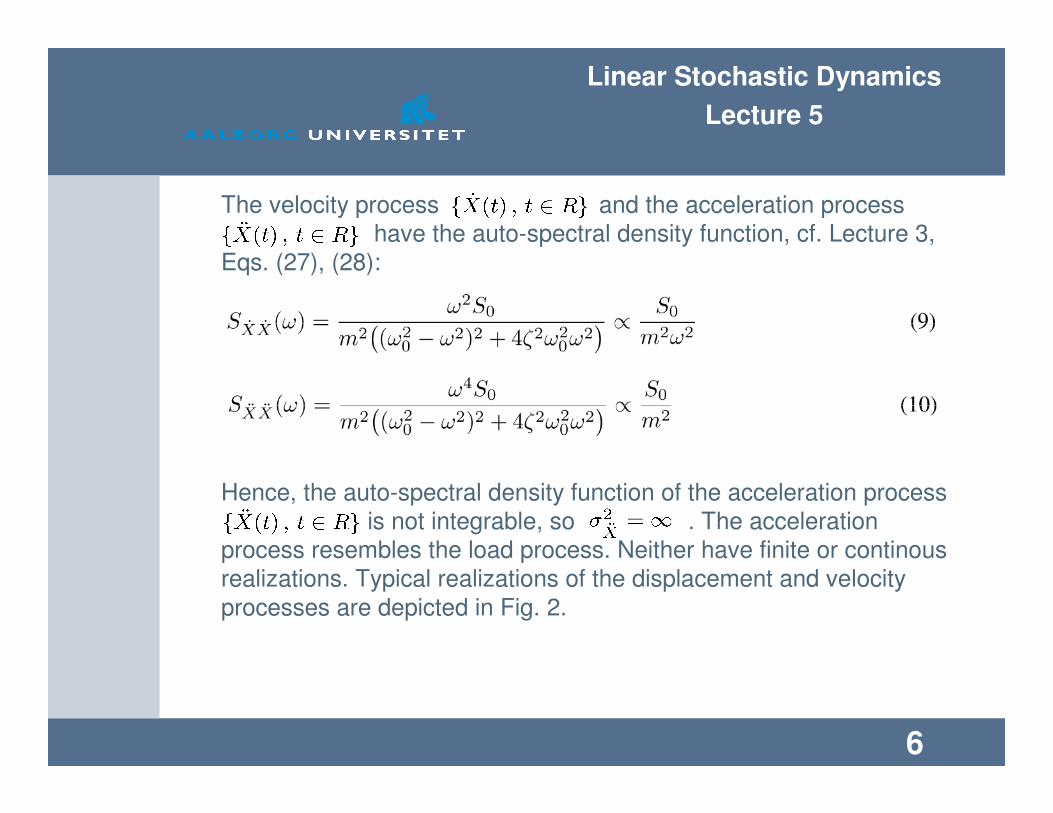
The velocity process and the acceleration process
have the auto-spectral density function, cf. Lecture 3,
Eqs. (27), (28):
Hence, the auto-spectral density function of the acceleration process
is not integrable, so . The acceleration
process resembles the load process. Neither have finite or continous
realizations. Typical realizations of the displacement and velocity
processes are depicted in Fig. 2.

Linear Stochastic Dynamics
Lecture 5
7
SDOF system exposed to filtered Gaussian white noise:
The load process is obtained by a filtration of a
Gaussian unit intensity white noise process defined
by the auto-covariance and auto-spectral density functions:

Linear Stochastic Dynamics
Lecture 5
8
The filter is defined by the rational frequency response function of
the order :
Then, the auto-spectral density function of the load process
becomes:
are determined, so (13) at best fits a
given target load spectrum.

Linear Stochastic Dynamics
Lecture 5
9
The auto-spectral density function of the displacement process
becomes, cf. (4), (13):
The resulting frequency response function is a rational
function of the order , obtained as a product of the components
and :
where , and:
Linear Stochastic Dynamics
Lecture 5
10
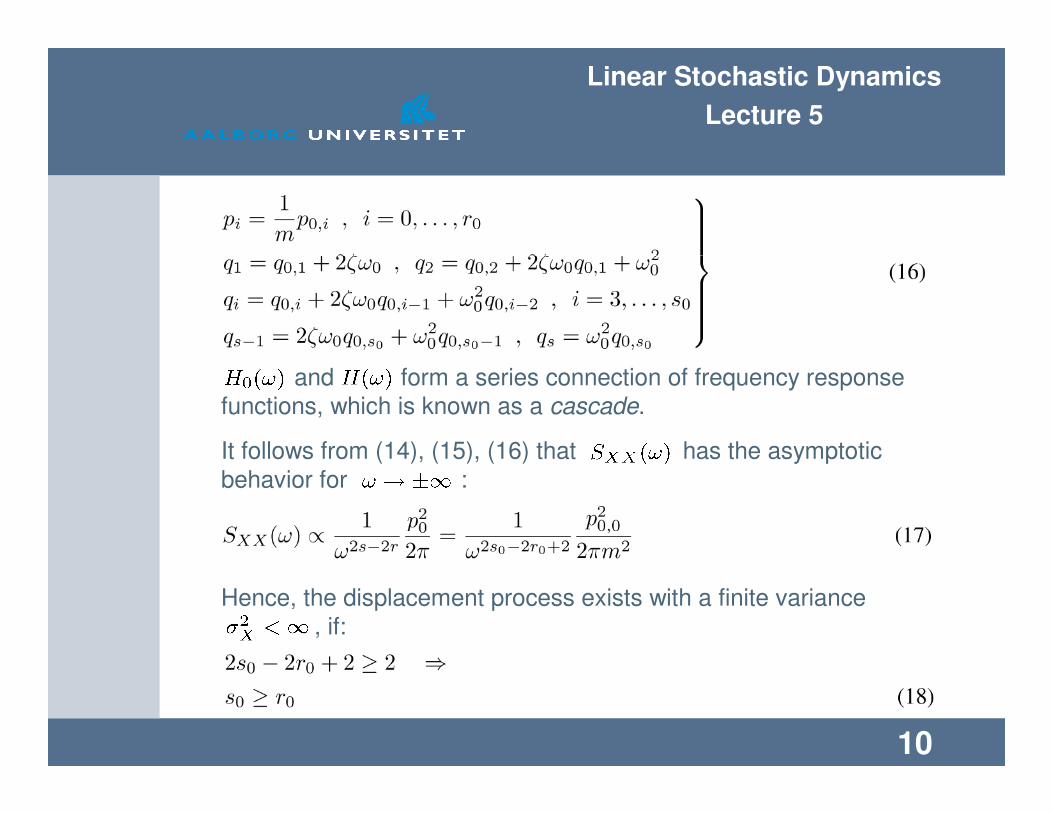
and form a series connection of frequency response
functions, which is known as a cascade.
It follows from (14), (15), (16) that has the asymptotic
behavior for :
Hence, the displacement process exists with a finite variance
, if:
Linear Stochastic Dynamics
Lecture 5
11
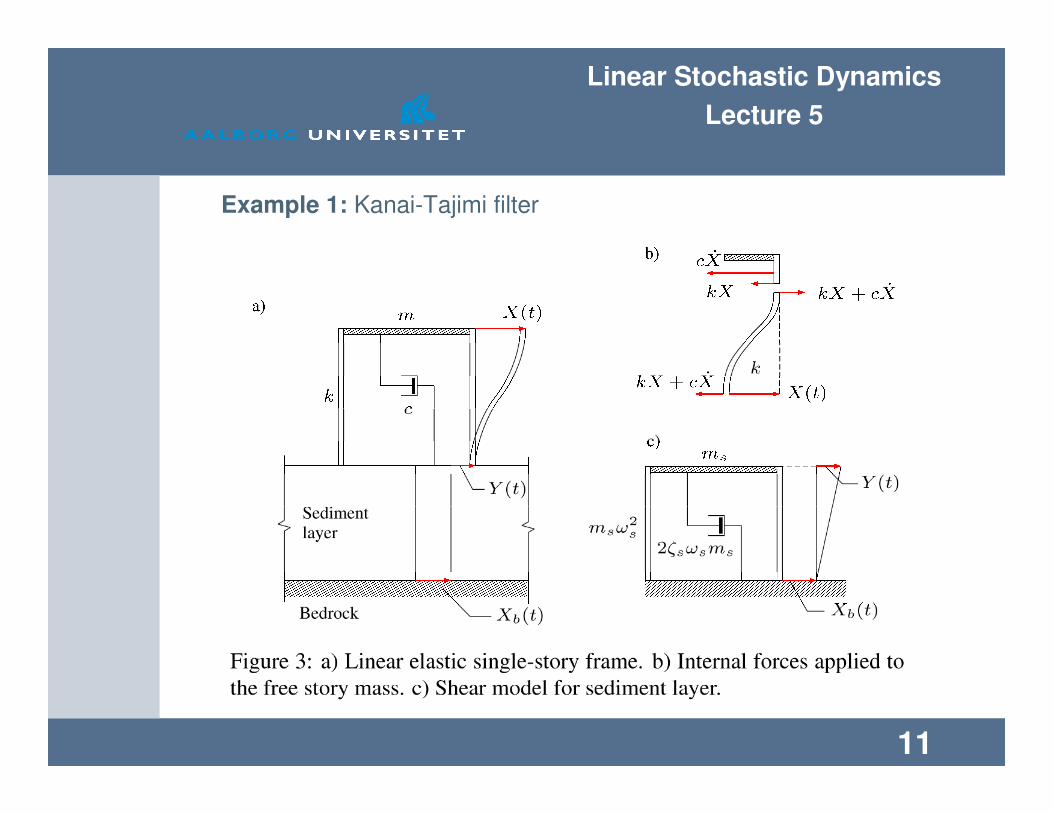
Example 1: Kanai-Tajimi filter
Linear Stochastic Dynamics
Lecture 5
12
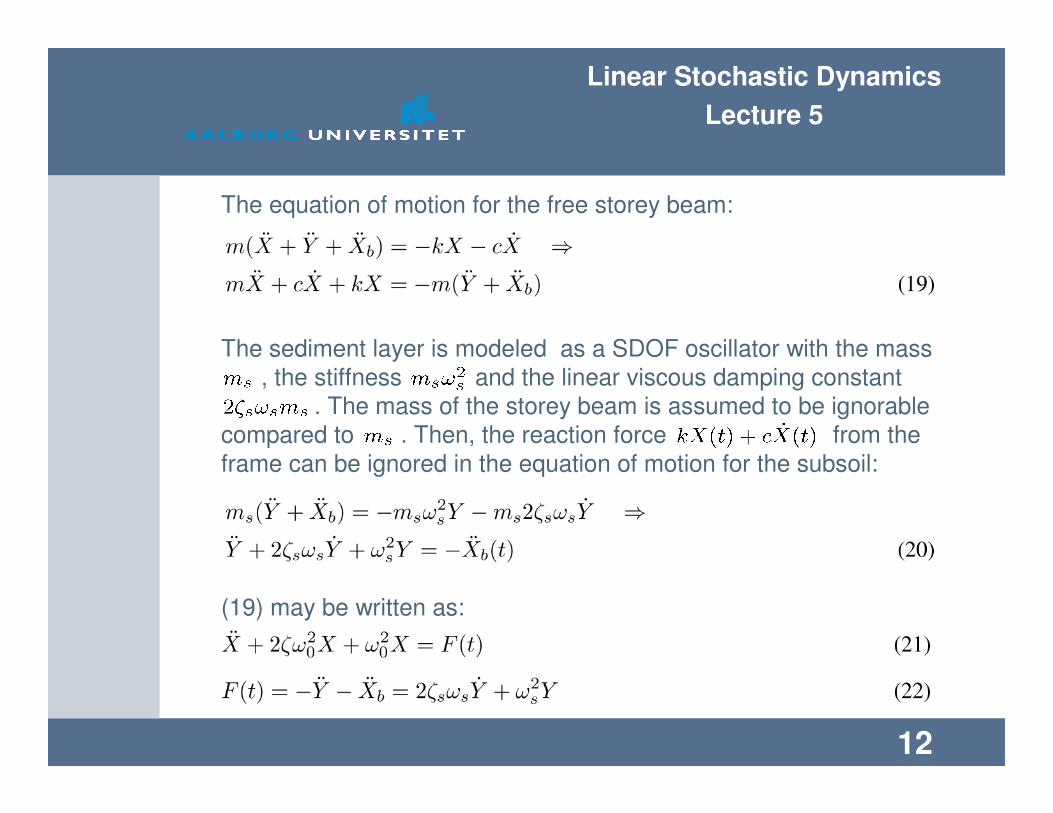
The equation of motion for the free storey beam:
The sediment layer is modeled as a SDOF oscillator with the mass
, the stiffness and the linear viscous damping constant
. The mass of the storey beam is assumed to be ignorable
compared to . Then, the reaction force from the
frame can be ignored in the equation of motion for the subsoil:
(19) may be written as:

Linear Stochastic Dynamics
Lecture 5
13
where and are the angular eigenfrequency and damping ratio
of the frame:
(20) and (22) determines the earthquake load on the frame as
the output of a rational filter of the order with the filter
constants, cf. (12):
The indicated earthquake model is known as a Kanai-Tajimi filter.
The input to the filter is the bedrock acceleration process
.
The primary energy drain in the subsoil is due to energy transport
carried by the elastic stress waves, and not due to mechanical
dissipation in the soil. For this reason the damping ratio of the
subsoil in the model need to be chosen relatively large, . .

Linear Stochastic Dynamics
Lecture 5
14
� Example 2: Single-degree-of-freedom system exposed to an
indirectly acting dynamic load and damping force.
� : Point mass at point 1.
� : Damper constant. Damper is acting at point 2.
� : Dynamic load. Load is acting at point 3.
� : Degree of freedom of point mass.
� : Auxiliary degree of freedom of support point of damper.
� : Auxiliary degree of freedom of attack point of load.
Linear Stochastic Dynamics
Lecture 5
15
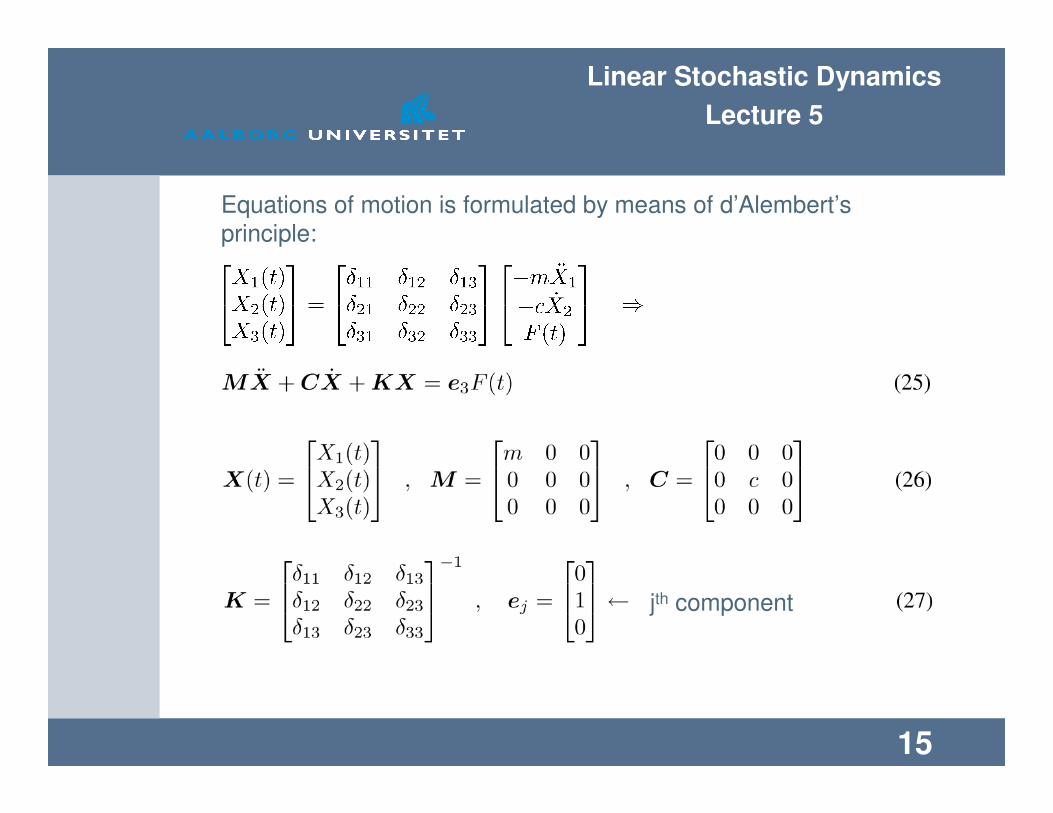
Equations of motion is formulated by means of d’Alembert’s
principle:
jth component
Linear Stochastic Dynamics
Lecture 5
16
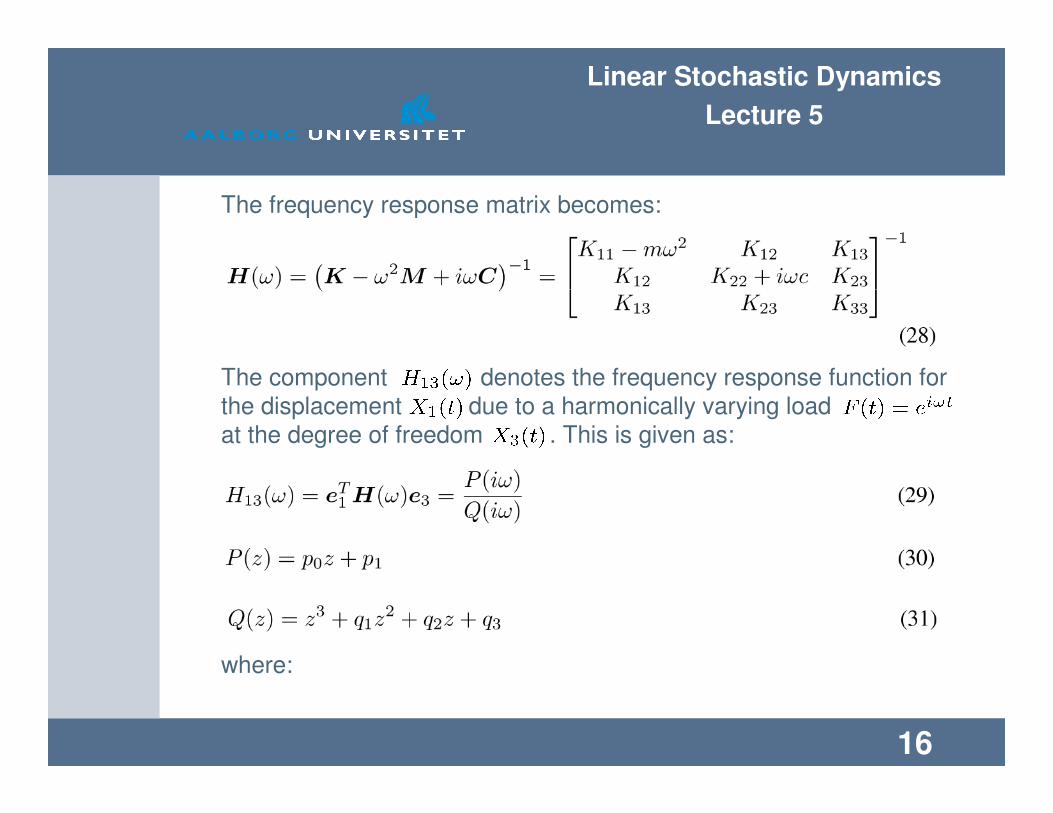
The frequency response matrix becomes:
The component denotes the frequency response function for
the displacement due to a harmonically varying load
at the degree of freedom . This is given as:
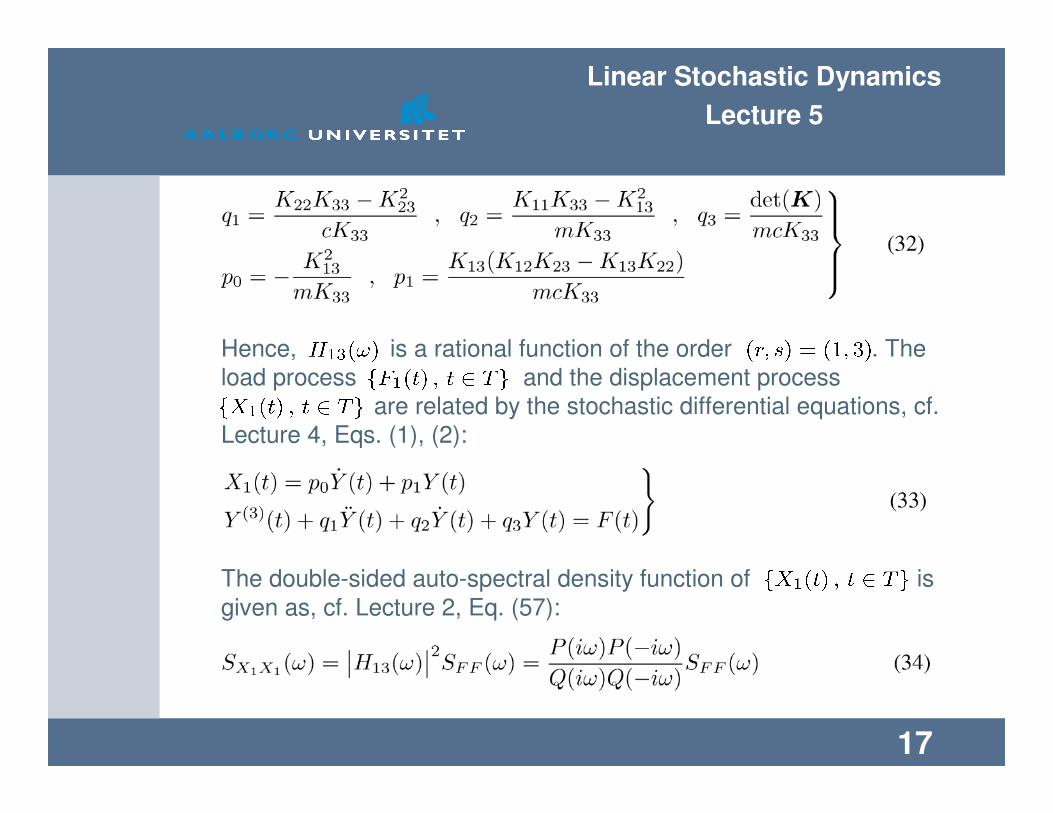
where:
Linear Stochastic Dynamics
Lecture 5
17
Hence, is a rational function of the order . The
load process and the displacement process
are related by the stochastic differential equations, cf.
Lecture 4, Eqs. (1), (2):
The double-sided auto-spectral density function of is
given as, cf. Lecture 2, Eq. (57):
Linear Stochastic Dynamics
Lecture 5
18
If is a Gaussian white noise process with the auto-
spectral density function , (34) reduces to:
Hence, and have continous
realizations. does not exist with a finite variance. The
realizations of and resemble those
shown in Fig. 2.
Linear Stochastic Dynamics
Lecture 5
19
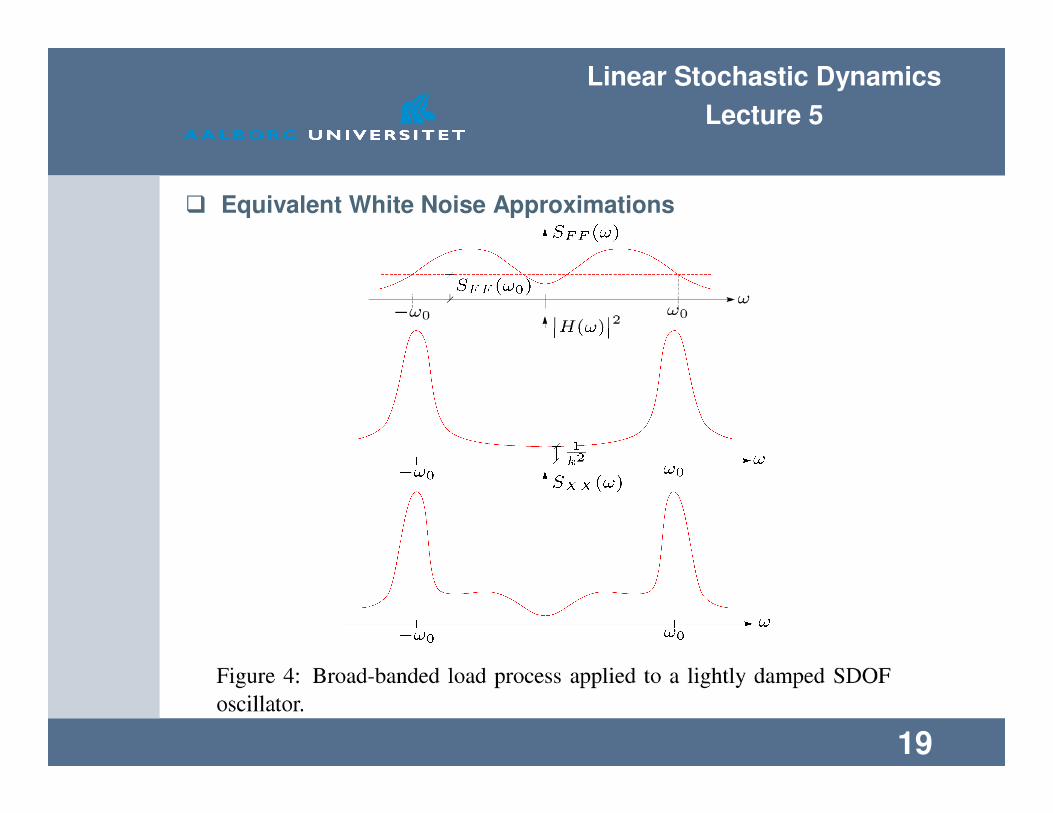
� Equivalent White Noise Approximations

Linear Stochastic Dynamics
Lecture 5
20
The load process is assumed to be weakly stationary
with a broad-banded auto-spectral density function without
any marked peaks.
The oscillator is assumed to be lightly damped, i.e. . Then,
has a marked peak at . Actually, cf. Eq. (1):
Then, the following approximation for the variance of the
displacement process applies:
Linear Stochastic Dynamics
Lecture 5
21
Hence, the approximations leading to (37) is equivalent to the
replacement of the actual broad-banded load process with an
equivalent Gaussian white noise process with the auto-spectral
density function , see Fig. 4a. This is so, because only
harmonic load components with angular frequencies close to the
angular eigenfrequency contributes significantly to the variance of
the reponse.
Linear Stochastic Dynamics
Lecture 5
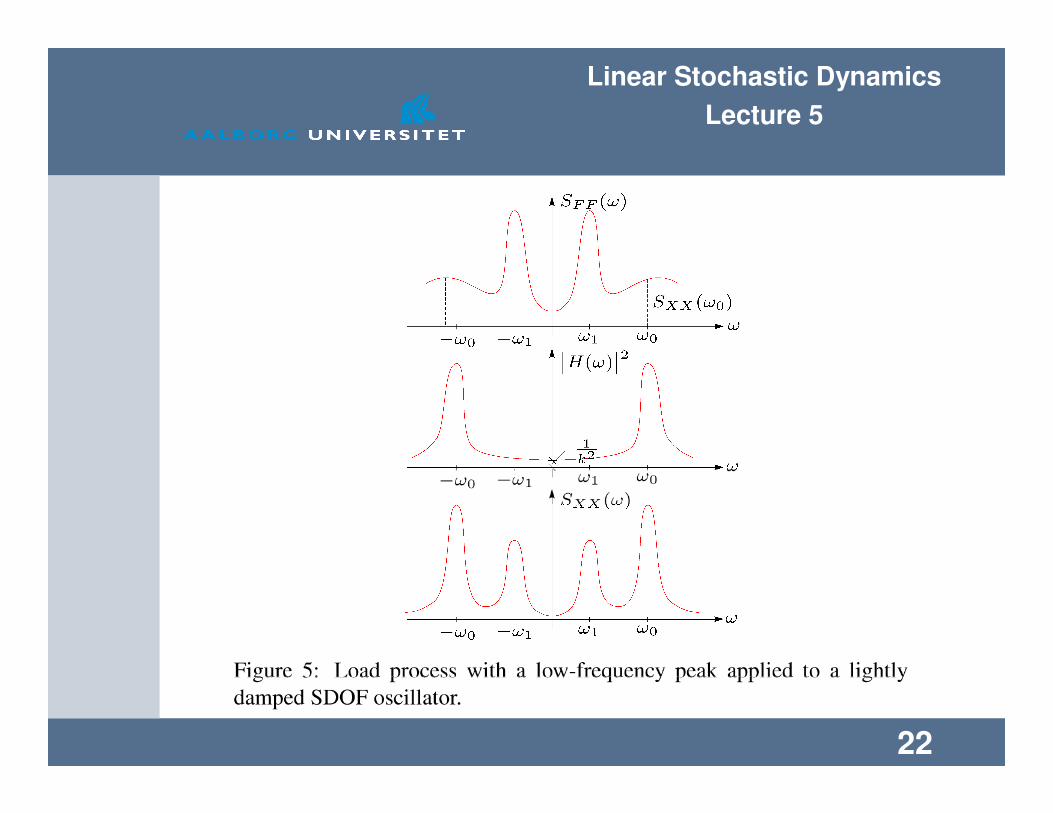
22
Linear Stochastic Dynamics
Lecture 5
23
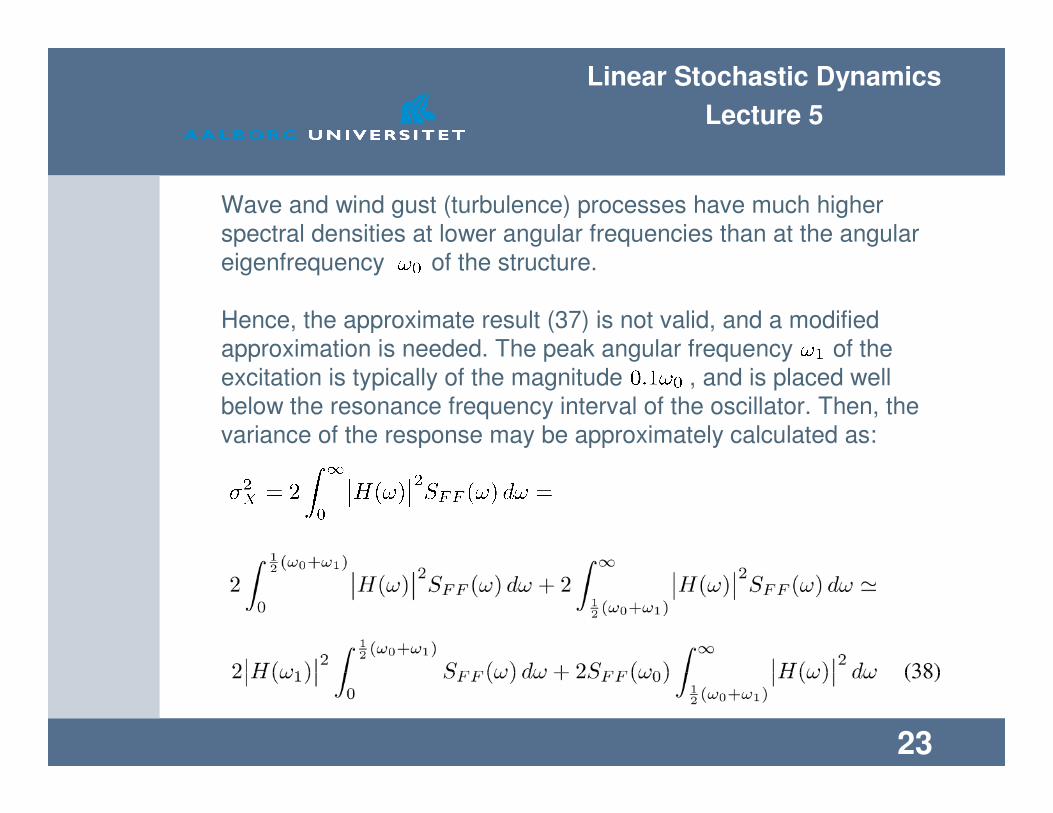
Wave and wind gust (turbulence) processes have much higher
spectral densities at lower angular frequencies than at the angular
eigenfrequency of the structure.
Hence, the approximate result (37) is not valid, and a modified
approximation is needed. The peak angular frequency of the
excitation is typically of the magnitude , and is placed well
below the resonance frequency interval of the oscillator. Then, the
variance of the response may be approximately calculated as:

Linear Stochastic Dynamics
Lecture 5
24
Next, the following approximations are applied:
Linear Stochastic Dynamics
Lecture 5
25
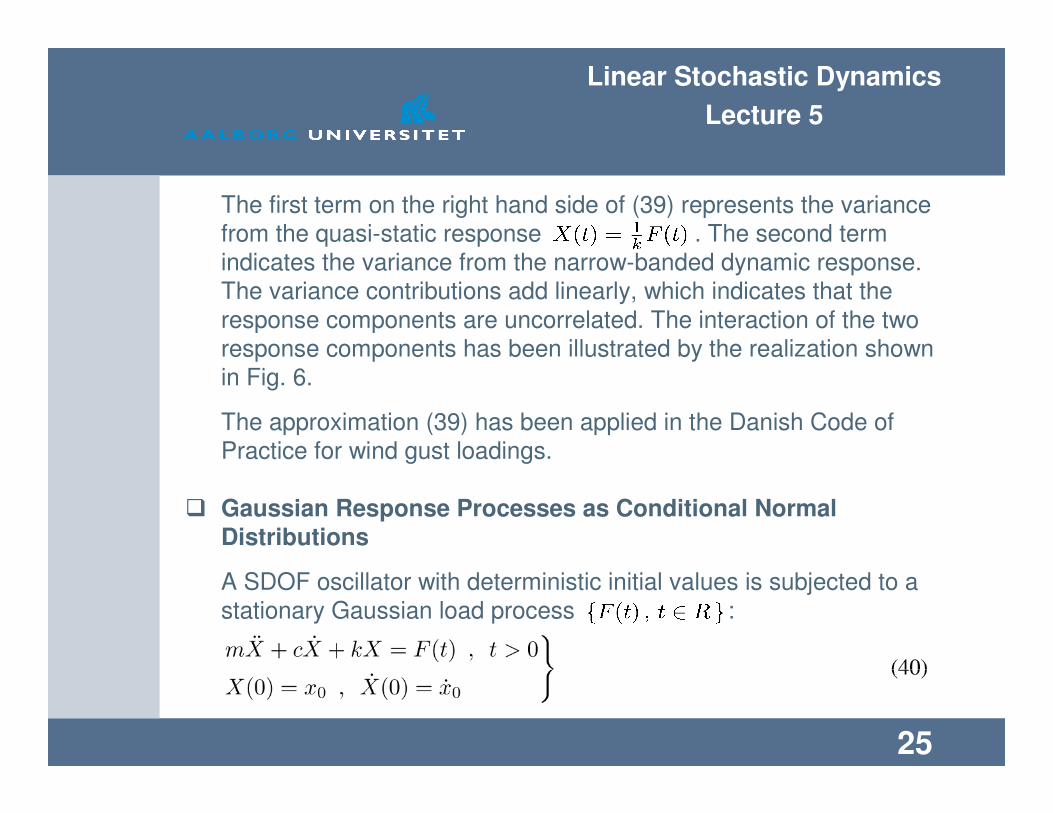
The first term on the right hand side of (39) represents the variance
from the quasi-static response . The second term
indicates the variance from the narrow-banded dynamic response.
The variance contributions add linearly, which indicates that the
response components are uncorrelated. The interaction of the two
response components has been illustrated by the realization shown
in Fig. 6.
The approximation (39) has been applied in the Danish Code of
Practice for wind gust loadings.
� Gaussian Response Processes as Conditional Normal Distributions
A SDOF oscillator with deterministic initial values is subjected to a
stationary Gaussian load process :

Linear Stochastic Dynamics
Lecture 5
26
Due to the linearity the response process becomes Gaussian as well.
Next, consider the stationary displacement process, obtained as
solution to the stochastic differential equation (40), when the load
process has been acting in infinite long time. The process is defined
by the mean value function and the auto-covariance function
, where is the stationary variance, and
signifies the auto-correlation coefficient function.
The displacement and the velocity at the time are in
this case random variables. Consider the 4-dimensional normal
distributed stochastic vector:
where and denotes the state vector at the times and . The
joint probability density function of becomes, cf. Lecture 1, Eqs.
(20), (21), (22):
Linear Stochastic Dynamics
Lecture 5
27
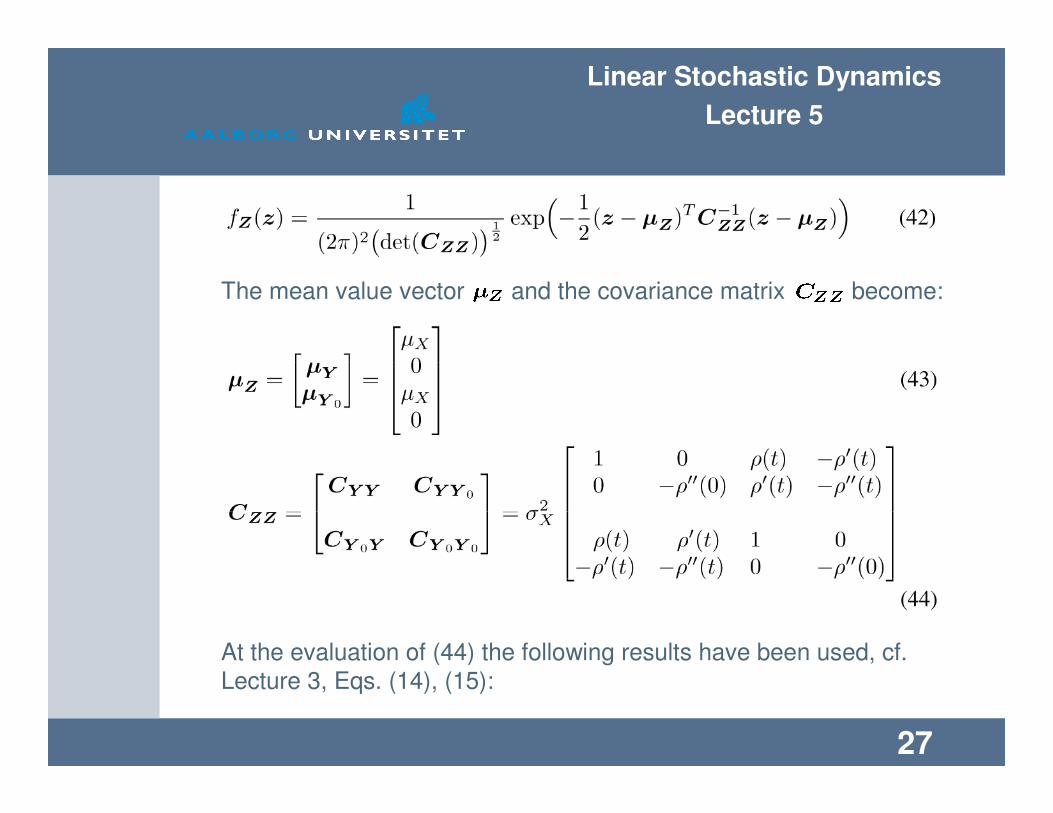
The mean value vector and the covariance matrix become:
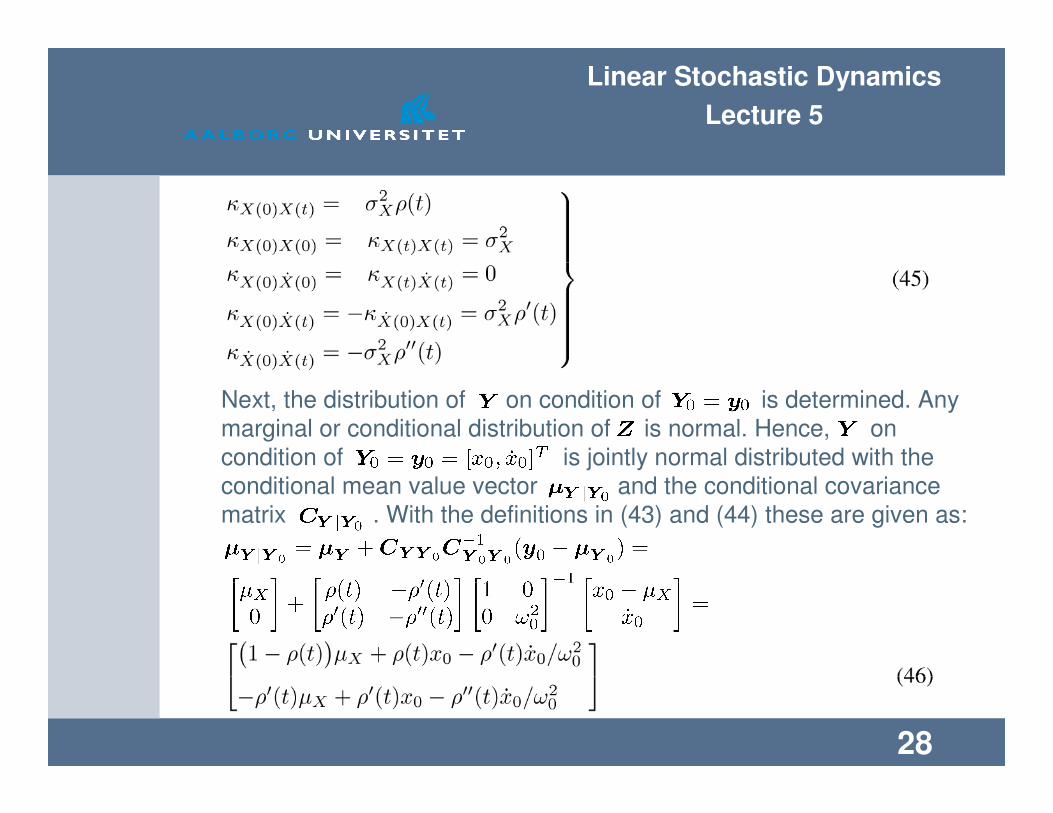
At the evaluation of (44) the following results have been used, cf.
Lecture 3, Eqs. (14), (15):
Linear Stochastic Dynamics
Lecture 5
28
Next, the distribution of on condition of is determined. Any
marginal or conditional distribution of is normal. Hence, on
condition of is jointly normal distributed with the
conditional mean value vector and the conditional covariance
matrix . With the definitions in (43) and (44) these are given as:

Linear Stochastic Dynamics
Lecture 5
29
where has been introduced in (46) and (47).
(40) may be formulated on the state vector form, cf. Lecture 4, Eq. (42):
Linear Stochastic Dynamics
Lecture 5
30
The considered conditional mean value vector and the
conditional covariance matrix are per definition the mean
value vector function and the zero time-lag covariance matrix
obtained from (48) at the time .
Next, assume that is a Gaussian white noise process
with the auto-spectral density function .Then, is
given by (7) and is given by (8). Further, the
components of and are determined from the
following differential equations, cf. Lecture 4, Eqs. (28) and (36):

Linear Stochastic Dynamics
Lecture 5
31
The differential equations (50) follows by explicit calculation of the
right-hand side of Lecture 4, Eq. (39), cf. Lecture 4, Eq. (44).
From the above argumentation it follows that the solution to (49) and
(50) are given by (46) and (47) for :
Linear Stochastic Dynamics
Lecture 5
32
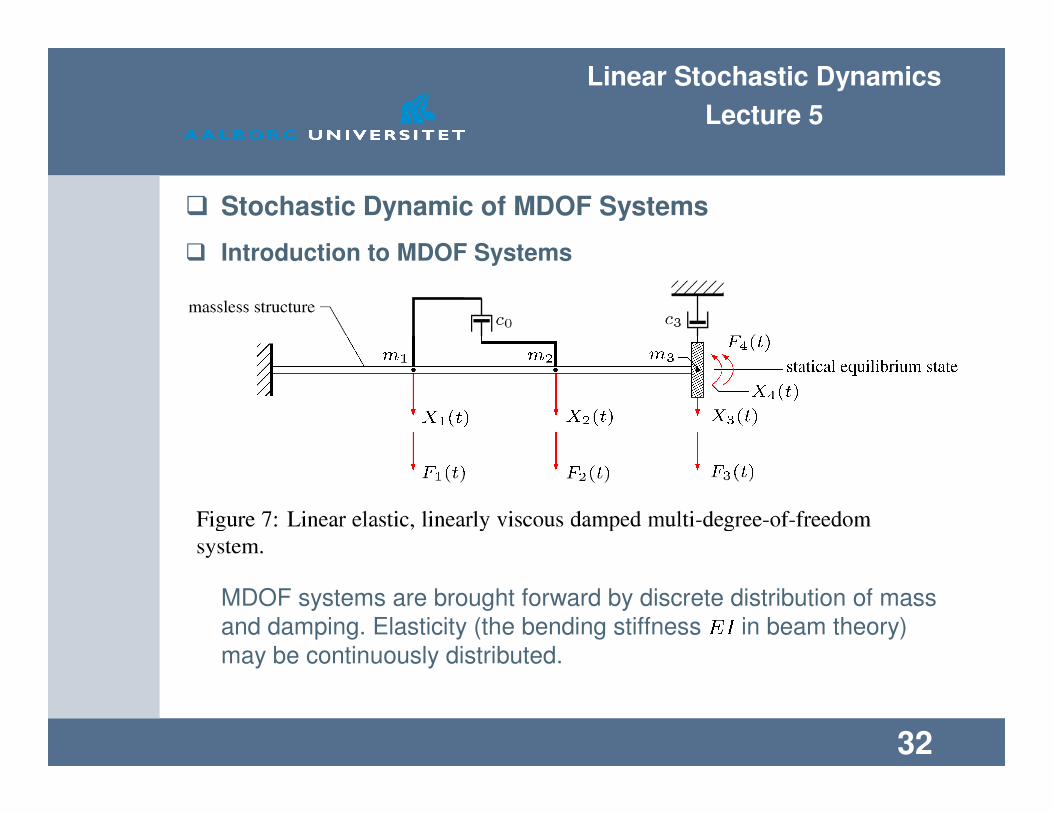
� Stochastic Dynamic of MDOF Systems
� Introduction to MDOF Systems
MDOF systems are brought forward by discrete distribution of mass
and damping. Elasticity (the bending stiffness in beam theory)
may be continuously distributed.
Linear Stochastic Dynamics
Lecture 5
33
The number of degrees of freedom specifies the number of
unconstrained displacement degrees of each point mass (up to 3
dofs) and the number of unconstrained displacement and rotational
degrees of freedom of each rigid, distributed mass (up to 6 dofs).
� : -dimensional load vector process.
� : -dimensional displacement vector process.
� : Index time interval.
may contain both displacement and rotational
component processes.

Linear Stochastic Dynamics
Lecture 5
34
Stochastic vector differential equation:
� : Initial value vectors. Stochastic vectors of dimension .
� : Mass matrix .
� : Damping matrix. .
� : Stiffness matrix. .
Linear Stochastic Dynamics
Lecture 5
35
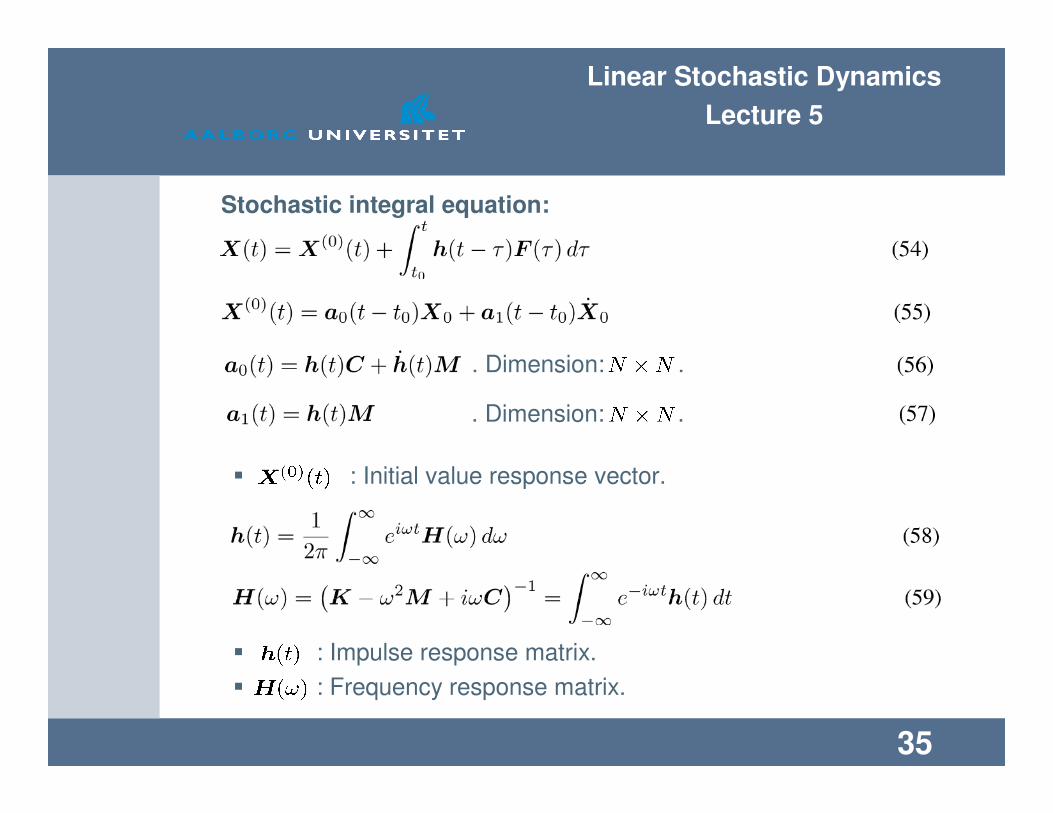
Stochastic integral equation:
� : Initial value response vector.
� : Impulse response matrix.
� : Frequency response matrix.
. Dimension: .
. Dimension: .

Linear Stochastic Dynamics
Lecture 5
36
Modal analysis:
Undamped eigenvibrations are assumed on the form:
The amplitude vector , the angular frequency and the common
phase are determined by insertion in (53) for , .
This leads to the generalized eigenvalue problem:
Nontrivial solutions for exist for:
Eigensolutions are real, due to the symmetry properties
, , and because or are positive definite.
� : Undamped angular eigenfrequency of the jth mode.
� : Eigenmode.
Linear Stochastic Dynamics
Lecture 5
37
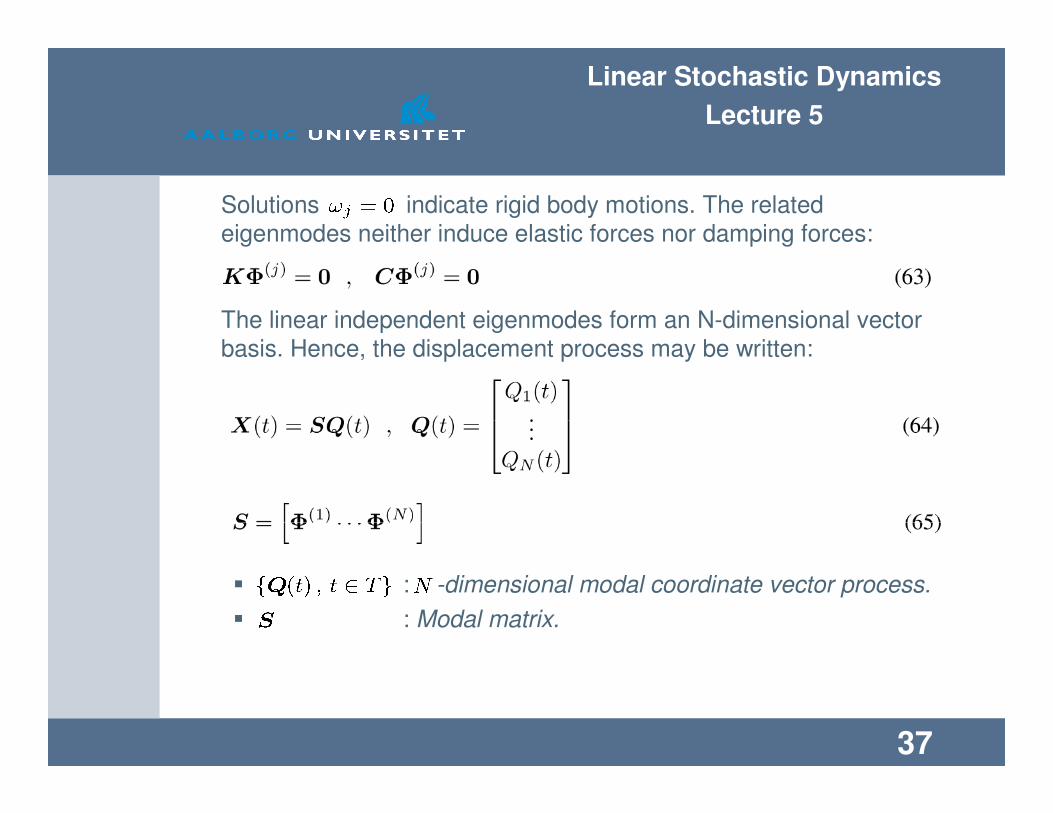
Solutions indicate rigid body motions. The related
eigenmodes neither induce elastic forces nor damping forces:
The linear independent eigenmodes form an N-dimensional vector
basis. Hence, the displacement process may be written:
� : -dimensional modal coordinate vector process.
� : Modal matrix.

Linear Stochastic Dynamics
Lecture 5
38
Insertion of (64) into (53), and premultiplication with provides:
Linear Stochastic Dynamics
Lecture 5
39
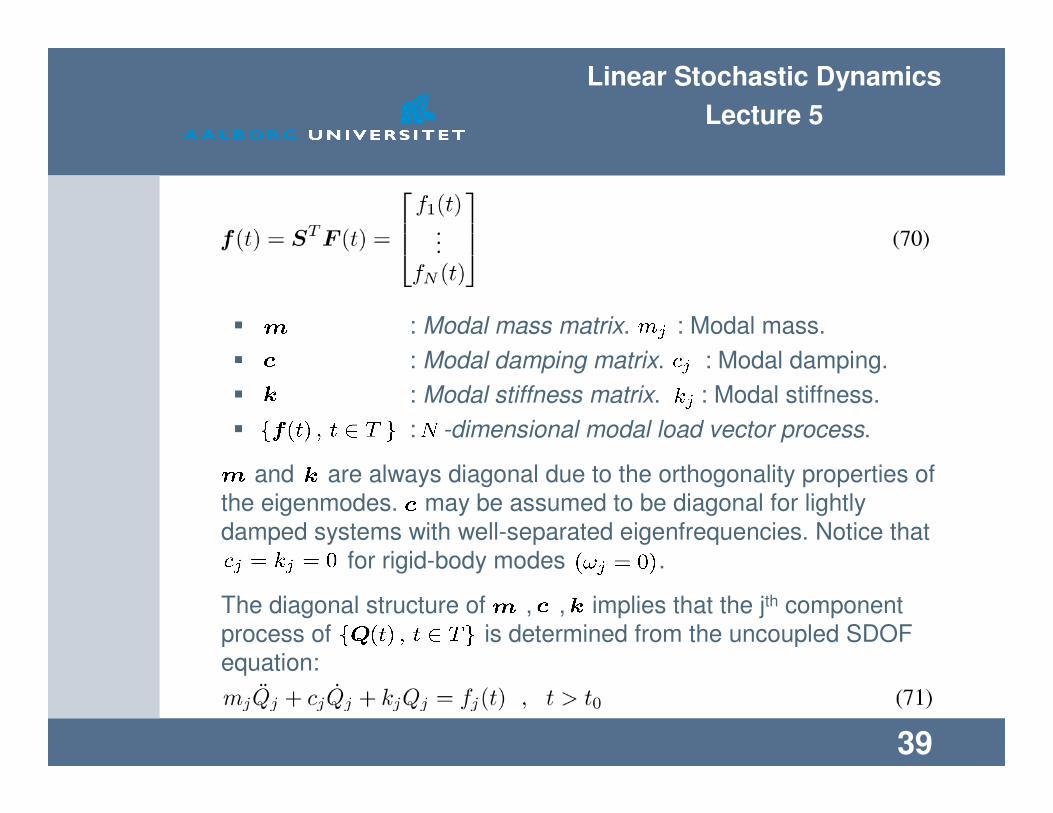
� : Modal mass matrix. : Modal mass.
� : Modal damping matrix. : Modal damping.
� : Modal stiffness matrix. : Modal stiffness.
� : -dimensional modal load vector process.
and are always diagonal due to the orthogonality properties of
the eigenmodes. may be assumed to be diagonal for lightly
damped systems with well-separated eigenfrequencies. Notice that
for rigid-body modes .
The diagonal structure of , , implies that the jth component
process of is determined from the uncoupled SDOF
equation:
Linear Stochastic Dynamics
Lecture 5
40
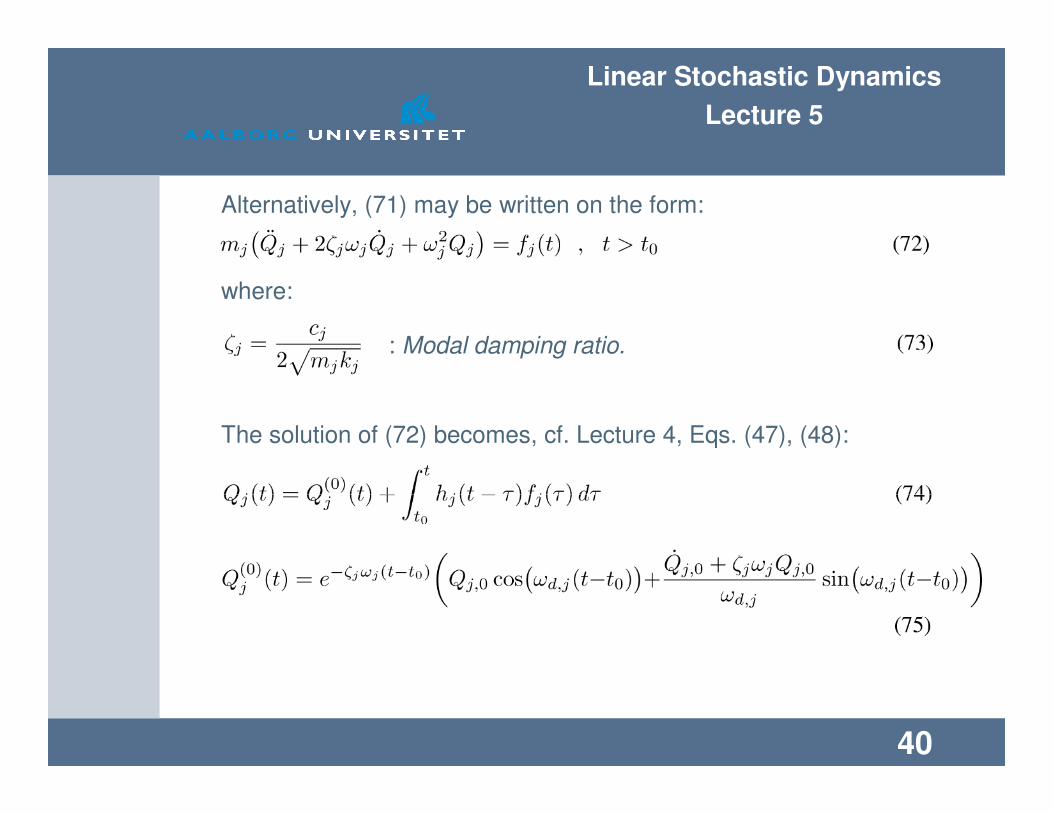
Alternatively, (71) may be written on the form:
where:
The solution of (72) becomes, cf. Lecture 4, Eqs. (47), (48):
: Modal damping ratio.

Linear Stochastic Dynamics
Lecture 5
41
� : Modal impulse response function of the jth mode.
� : Damped angular eigenfrequency of the jth mode.
� : Frequency response function of the jth mode.
Linear Stochastic Dynamics
Lecture 5
42
Summary of Lecture 5
� Weakly Stationary Response Processes.
: Frequency response function.
Linear Stochastic Dynamics
Lecture 5
43
� Equivalent White Noise Approximations.
is stationary and broad-banded.
� Gaussian Response Processes as Conditional Normal Distributions.
Given a zero mean stationary Gaussian process with
the auto-covariance function:
Let:
We search the joint probability density function of on condition
of .

Linear Stochastic Dynamics
Lecture 5
44
on condition of is normal distributed
, where: